OPTIMASI PROGRAM LINIER PECAHAN DENGAN FUNGSI
TUJUAN BERKOEFISIEN INTERVAL
SKRIPSI
M KHAHFI ZUHANDA
090803064
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
OPTIMASI PROGRAM LINIER PECAHAN DENGAN FUNGSI TUJUAN BERKOEFISIEN INTERVAL
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
M KHAHFI ZUHANDA 090803064
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : OPTIMASI PROGRAM LINIER PECAHAN
DENGAN FUNGSI TUJUAN BERKOEFISIEN INTERVAL
Kategori : SKRIPSI
Nama : M KHAHFI ZUHANDA
Nomor Induk Mahasiswa : 090803064
Program Studi : SARJANA (S1) MATEMATIKA
Departemen : MATEMATIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, September 2013
Komisi Pembimbing :
Pembimbing 2, Pembimbing 1,
Dr. Esther Sorta M Nababan, M.Sc Drs.Sawaluddin,M.I.T
NIP. 19610318 198711 2 001 NIP. 19591231 199802 1 001
Diketahui/ Disetujui oleh:
Departemen Matematika FMIPA USU Ketua,
PERNYATAAN
OPTIMASI PROGRAM LINIER PECAHAN DENGAN FUNGSI TUJUAN BERKOEFISIEN INTERVAL
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, September 2013
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Allah SWT yang senantiasa
memberikan segala rahmat dan hidayah-Nya, dan yang telah memberi kekuatan
akal dan fikiran sehingga penulis dapat menyelesaikan skripsi ini dalam waktu
yang ditetapkan.
Ucapan terima kasih penulis sampaikan kepada Bapak Drs. Sawaluddin,
M.I.T selaku pembimbing I dan Ibu Dr. Esther Sorta M Nababan, M.Sc selaku
pembimbing II yang telah menyediakan waktunya untuk membimbing dan
memberikan pengarahan kepada saya sehingga penyusunan skripsi ini dapat
diselesaikan.
Penulis juga mengucapkan terima kasih kepada Bapak Drs. Agus Salim
Harahap, M.Si dan Bapak Drs. Suwarno Ariswoyo, M.Si selaku dosen penguji
saya, Bapak Prof. Dr. Tulus, M.Si dan Ibu Dr. Mardiningsih, M.Si selaku Ketua
dan Sekretaris Departemen Matematika FMIPA USU Medan, Dekan dan
Pembantu Dekan FMIPA USU, seluruh staff pengajar Matematika di FMIPA
USU, beserta pegawai Administrasi.
Penulis juga mengucapkan terima kasih kepada orang tua tercinta Zunaidi,
SE yang telah memberikan dukungan, doa, dan semua bantuan yang diperlukan
penulis, Adik-adik penulis yang penulis sayangi Novi Dara Utami, Arbie Saldi
Zusri dan Pri Zuri Hartadi yang selalu menghibur di saat penulis senang ataupun
susah. Akhirnya penulis juga mengucapkan terima kasih kepada seluruh
teman-teman dekat penulis, khususnya kepada Hani Syahida Harahap, Johannes
Antonius Manurung, Rahmat Ramadhan Siregar, Andri Sinaga, Muhammad
Syukran, Nur Zakiya Harahap, Aswin Bahar Lubis dan teman-teman yang tidak
dapat saya sebutkan satu persatu yang telah memberikan dorongan semangat serta
ABSTRAK
Beberapa tahun belakangan, telah ditemukan beberapa cara untuk menyelesaikan kasus program linier. Salah satunya adalah progam linier pecahan (PLP). Pada beberapa masalah aplikasi program linier (PL), koefisien pada model seringkali tidak bisa ditentukan secara tepat. Salah satu metode dalam menyelesaikan masalah ini adalah dengan menggunakan pendekatan interval, dimana koefisien tak tentu tersebut diubah menjadi bentuk interval. Program linier pecahan dengan fungsi tujuan berkoefisien interval dapat diselesaikan dengan transformasi yang diperkenalkan oleh Charnes dan Cooper. Metode ini menggunakan kombinasi titik awal dan akhir dari interval yang digunakan sebagai pengganti koefisien selang interval. Hasil kajian ini menunjukkan bahwa persoalan optimasi program linier pecahan dengan koefisien interval dapat ditransformasikan ke dalam bentuk linier dengan menggunakan transformasi Charnes dan Cooper.
ABSTRACT
In the recent years, was found some approaches to solve linear programming problem. One of them is linear fractional programming problem (LFP). On some applications of linear programming problems (LP), the coefficient on the model often can not be determined precisely. One method to solve this LP problem is to use an interval approach, where uncertain coefficients are transformed into the form of intervals. The linear fractional programming problem with interval coefficients in objective function is solved by the variable transformation. The transformation was introduced by Charnes and Cooper. In this method a combination of the first and the last points of the intervals are used in place of the intervals. This research showed that optimization linear fractional programming with interval coefficient in objective function can be transformed with Charnes
and Chooper’s transformation.
DAFTAR ISI
Daftar Tabel viii
Datar Lampiran ix
Bab 1 Pendahuluan
1.1 Latar Belakang 1
1.2 Rumusan Masalah 3
1.3 Batasan Masalah 3
1.4 Tinjauan Pustaka 3
1.5 Tujuan Penelitian 5
1.6 Kontribusi Penelitian 5
1.7 Metodologi Penelitian 6
Bab 2 Landasan Teori
2.1 Interval 7
2.2 Linear Programming Interval Coefficient (LPIC) 8
2.3 Program Linier Pecahan (PLP) 9
2.4 Program Linier 10
Bab 3 Pembahasan
3.1 Hubungan Program Linier Pecahan dengan Program Linier 20
3.2 Transformasi Charnes-Cooper 21
3.3 Program Linier Pecahan Dengan Fungsi Tujuan Berkoefisien
Interval 22
Bab 4 Kesimpulan dan Saran
4.1 Kesimpulan 37
4.2 Saran 37
Daftar Pustaka 48
DAFTAR TABEL
Halaman
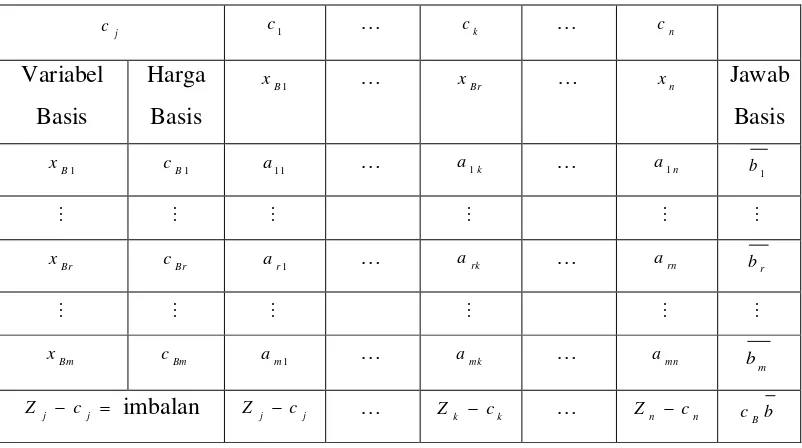
Tabel 2.1 Bentuk Tabel Simpleks 15
DAFTAR LAMPIRAN
Halaman Lampiran 1. Tampilan Data Input dan Output QM for Windows untuk
Penyelesaian Maksimasi Program Linier Kasus 1 39
Lampiran 2. Tampilan Data Input dan Output QM for Windows untuk
ABSTRAK
Beberapa tahun belakangan, telah ditemukan beberapa cara untuk menyelesaikan kasus program linier. Salah satunya adalah progam linier pecahan (PLP). Pada beberapa masalah aplikasi program linier (PL), koefisien pada model seringkali tidak bisa ditentukan secara tepat. Salah satu metode dalam menyelesaikan masalah ini adalah dengan menggunakan pendekatan interval, dimana koefisien tak tentu tersebut diubah menjadi bentuk interval. Program linier pecahan dengan fungsi tujuan berkoefisien interval dapat diselesaikan dengan transformasi yang diperkenalkan oleh Charnes dan Cooper. Metode ini menggunakan kombinasi titik awal dan akhir dari interval yang digunakan sebagai pengganti koefisien selang interval. Hasil kajian ini menunjukkan bahwa persoalan optimasi program linier pecahan dengan koefisien interval dapat ditransformasikan ke dalam bentuk linier dengan menggunakan transformasi Charnes dan Cooper.
ABSTRACT
In the recent years, was found some approaches to solve linear programming problem. One of them is linear fractional programming problem (LFP). On some applications of linear programming problems (LP), the coefficient on the model often can not be determined precisely. One method to solve this LP problem is to use an interval approach, where uncertain coefficients are transformed into the form of intervals. The linear fractional programming problem with interval coefficients in objective function is solved by the variable transformation. The transformation was introduced by Charnes and Cooper. In this method a combination of the first and the last points of the intervals are used in place of the intervals. This research showed that optimization linear fractional programming with interval coefficient in objective function can be transformed with Charnes
and Chooper’s transformation.
BAB 1
PENDAHULUAN
1.1Latar Belakang
Dalam beberapa tahun terakhir, para pakar matematika telah banyak
mencoba melakukan pendekatan untuk memecahkan permasalahan Program
Linier Pecahan (PLP). Dalam tulisan ini akan menjelaskan Program Linier
Pecahan merupakan salah satu kasus khusus dari pemrograman non linier, yang
umumnya digunakan untuk masalah-masalah kehidupan nyata dengan pemodelan
satu atau lebih tujuan seperti keuntungan /biaya, aktual pendapatan / standarisasi,
input / karyawan, dan lain-lain. Dan itu diterapkan untuk berbagai disiplin ilmu
seperti sebagai teknik, bisnis, keuangan, ekonomi, dan lain-lain.
Pemrograman Linier Pecahan (PLP) adalah kelas khusus dari
pemrograman non linier yang dapat ditransformasikan menjadi masalah
pemrograman linier dengan metode Charnes dan Cooper. (Stancu-Minansian,
1997)
Program Linear adalah suatu cara untuk menyelesaikan persoalan
pengalokasian sumber-sumber yang terbatas di antara beberapa aktivitas yang
bersaing dengan cara terbaik yang mungkin dilakukan. Misalnya pengalokasian
fasilitas produksi, sumber daya nasional untuk kebutuhan domestik, penjadwalan
Program Linier memiliki beberapa sifat yaitu proporsionalitas, addivitas,
divisibilitas dan kepastian. Sifat linearitas suatu kasus dapat ditentukan dengan
menggunakan beberapa cara. Secara statistik, kita dapat memeriksa kelinearan
menggunakan grafik (diagram pencar) ataupun menggunakan uji hipotesa. Secara
teknis, linearitas ditunjukkan oleh adanya sifat proporsionalitas, additivitas,
divisibilitas dan kepastian fungsi tujuan dan pembatas.
Pada beberapa masalah aplikasi pemrograman linier (PL), koefisien pada
model seringkali tidak bisa ditentukan secara tepat. Salah satu metode dalam
menyelesaikan masalah PL ini adalah dengan menggunakan pendekatan interval,
dimana koefisien tak tentu tersebut diubah menjadi bentuk interval. Bentuk PL ini
dinamakan Linear Programming with Interval Coefficient (LPIC). Koefisien
berbentuk interval menandakan perluasan toleransi (atau daerah) dimana
parameter konstanta bisa diterima dan memenuhi model LPIC.
Pada tulisan ini akan dibahas salah satu metode dalam menyelesaikan
LPIC yang telah dikembangkan oleh JW Chinneck dan K Ramadan (2000).
Masalah LPIC memiliki fungsi objektif dan kendala persamaan atau
pertidaksamaan yang berkoefisien interval. Solusi optimum dibagi menjadi dua,
yaitu best optimum dan worst optimum. Dalam kasus minimisasi, best optimum
adalah solusi yang memiliki nilai fungsi objektif terkecil, sedangkan worst
optimum adalah solusi yang memiliki nilai fungsi objektif terbesar. Solusi
optimum pada LPIC didapatkan dengan mencari versi khusus dari fungsi objektif
dan kendala yang mengoptimumkan model, yaitu dipilih suatu nilai spesifik (nilai
ekstrim) pada koefisien interval yang membuat model LPIC tersebut optimum,
sehingga pemecahan masalah LPIC diperoleh dengan menyelesaikan PL yang
mengoptimumkan model LPIC. (Farida, 2011)
Berdasarkan uraian ini, peneliti tertarik untuk memilih judul penelitian
1.2Rumusan Masalah
Rumusan masalah dalam penelitian ini adalah :
Maksimumkan Z = [ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1]
[ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1,]
Kendala
xj 0 ( j = 1,2,…,m)
1. Menentukan Optimasi Program Linier Pecahan dengan koefisen fungsi
tujuan memiliki interval (interval).
2. Mentransformasikan permasalahan menjadi bentuk linier.
1.3Batasan Masalah
Batasan dalam penelitian ini adalah :
1. Mentransformasikan Optimasi Program Linier Pecahan.
2. Koefisien pada program linier pecahan berbentuk interval.
1.4Tinjauan Pustaka
Sebagai sumber pendukung teori dalam penulisan ini, maka penulis
mengggunakan beberapa pustaka antara lain :
Program Linier merupakan suatu teknik perencanaan yang menggunakan
model matematika dengan tujuan menemukan beberapa kombinasi alternatif dari
pemecahan masalah yang kemudian dipilih mana yang terbaik untuk menyusun
strategi dan langkah-langkah kebijakan tentang alokasi sumber daya yang ada
agar mencapai tujuan atau sasaran yang diinginkan secara optimal dengan
melibatkan variabel-variabel linear. Dalam model program linear dikenal dua
macam fungsi, yaitu fungsi objektif (objective function) dan fungsi kendala
Winston, W.L, 2003. Operations Research: Applications and Algorithms,
menyatakan bahwa bentuk umum model program linier adalah sebagai
berikut:
a = Koefisien teknologi dari variabel keputusan
ke-j pada kendala ke-i.
i
b = Koefisien ruas kanan pada kendala ke-i
Program Linier Pecahan (PLP) secara luas dikembangkan oleh seorang
matematisi Hungaria B.Martos dan asosiasinya di tahun 1960an dengan
memusatkan pada masalah optimisasi. Beberapa metode penyelesaian masalah ini
Charnes dan Cooper (1962) telah menyarankan metode mereka dengan
bergantung pada transformasi ini (PLP) kepada ekivalen program linier. Bentuk
Maksimumkan Z = �� +
+
Kendala
0 x
dimana ∈ � , x merupakan vektor dari variabel keputusan, , ∈ �
dan b adalah koefisien vektor yang diketahui, ∈ � adalah matriks yang
diketahui dan , ∈ � adalah konstanta. Kendala permasalahan dibatasi wilayah
feasible | � + > 0 , yaitu wilayah yang penyebut adalah positif atau
penyebut dari fungsi tujuan harus negatif di daerah feasible secara keseluruhan.
(Charnes & Cooper ,1962)
Pada beberapa masalah aplikasi pemrograman linier (PL), koefisien pada
model seringkali tidak bisa ditentukan secara tepat. Salah satu metode dalam
menyelesaikan masalah PL ini adalah dengan menggunakan pendekatan interval,
dimana koefisien tak tentu tersebut diubah menjadi bentuk interval. Bentuk PL ini
dinamakan Linear Programming with Interval Coefficient (LPIC). Koefisien
berbentuk interval menandakan perluasan toleransi (atau daerah) dimana
parameter konstanta bisa diterima dan memenuhi model LPIC.
1.5Tujuan Penelitian
Secara umum, tujuan penelitian ini adalah untuk mengkaji masalah optimasi
Program Linier Pecahan (PLP) dengan fungsi tujuan berkoefisien interval.
1.6Kontribusi Penelitian
Hasil kajian ini diharapkan dapat menambah referensi bagi pembaca dan
pengambil keputusan dalam menyelesaikan optimasi Program Linier Pecahan
1.7Metodologi Penelitian
Penelitian ini bersifat studi literatur yang disusun berdasarkan rujukan pustaka
dengan langkah-langkah sebagai berikut:
Langkah-1: Melakukan studi keperpustakaan dengan mengumpulkan bahan
yang merujuk pada tulisan ini.
Langkah-2: Menjelaskan prosedur untuk mereduksi program linier pecahan
dengan fungsi tujuan berkoefisien interval.
Langkah-3: Menyelesaikan contoh numerik permasalahan dalam program
BAB 2
LANDASAN TEORI
2.1 Interval
Interval adalah himpunan bilangan real yang berada di antara dua bilangan
tertentu sebagai batas
Sifat-sifat Interval :
Jika = , dan = , dengan 0 B, maka:
- + = + , + (Penjumlahan)
- − = − , − (Pengurangan)
- ∗ = min , , , , { , , , } (Perkalian)
- / = , ∗[1,1] (Pembagian)
Jika 0∈ , maka A / B tidak terdefinisi.
Jika A, B, dan C∈ �( ) maka:
- + = + , ∗ = ∗ (Komutatif)
- + + = + + , ∗ ∗ = ∗( ∗ ) (Assosiatif)
- 0,0 1,1 , adalah elemen netral pada sifat penjumlahan dan pembagian
- Interval bilangan Riil tidak memiliki pembagi 0
- Bilangan Riil = , , ≠ tidak memiliki invers pada sifat
penjumlahan dan perkalian, namun,0∈ − 1∈( / )\
- ∗ + ∗ + ∗ (Subdistributif)
- + = + , ∈ �
2.2 Linear Programming Interval Coefficient (LPIC)
Pada beberapa masalah aplikasi pemrograman linier (PL), koefisien pada model
seringkali tidak bisa ditentukan secara tepat. Salah satu metode dalam
menyelesaikan masalah PL ini adalah dengan menggunakan pendekatan interval,
dimana koefisien tak tentu tersebut diubah menjadi bentuk interval. Bentuk PL ini
dinamakan Linear Programming with Interval Coefficient (LPIC). Koefisien
berbentuk interval menandakan perluasan toleransi (atau daerah) dimana
parameter konstanta bisa diterima dan memenuhi model LPIC.
Salah satu metode dalam menyelesaikan LPIC yang telah dikembangkan
oleh JW Chinneck dan K Ramadan (2000). Masalah LPIC memiliki fungsi
objektif dan kendala persamaan atau pertidaksamaan yang berkoefisien interval.
Solusi optimum dibagi menjadi dua, yaitu best optimum dan worst optimum.
Dalam kasus minimisasi, best optimum adalah solusi yang memiliki nilai fungsi
objektif terkecil, sedangkan worst optimum adalah solusi yang memiliki nilai
fungsi objektif terbesar. Solusi optimum pada LPIC didapatkan dengan mencari
versi khusus dari fungsi objektif dan kendala yang mengoptimumkan model, yaitu
dipilih suatu nilai spesifik (nilai ekstrim) pada koefisien interval yang membuat
model LPIC tersebut optimum, sehingga pemecahan masalah LPIC diperoleh
Bentuk linier dari persamaan LPIC adalah :
Maka Best Optimum dan Worst Optimum
2.3 Program Linier Pecahan (PLP)
Bidang dari Program Linier Pecahan (PLP) secara luas dikembangkan oleh
seorang matematisi Hungaria B.Martos dan asosiasinya di tahun 1960an dengan
memusatkan pada masalah optimisasi. Beberapa metode penyelesaian masalah ini
Charnes dan Cooper (1962) telah menyarankan metode mereka dengan
bergantung pada transformasi ini (PLP) kepada ekivalen program linier. Bentuk
umum dari masalah PLP dapat dibuat sbb :
Maksimumkan Z = �� +
diketahui dan , ∈ � adalah konstanta. Kendala permasalahan dibatasi wilayah
feasible | � + > 0 , yaitu wilayah yang penyebut adalah positif. Atau,
penyebut dari fungsi tujuan harus negatif di daerah feasible secara keseluruhan.
(Charnes & Cooper ,1962)
2.3 Program linier
Optimasi.
Optimasi adalah sarana untuk mengekspresikan model matematika yang
bertujuan memecahkan masalah dengan cara terbaik. Untuk tujuan bisnis, hal ini
berarti memaksimalkan keuntungan dan efisiensi serta meminimalkan kerugian,
biaya atau resiko. Hal ini juga berarti merancang sesuatu untuk meminimalisasi
bahan baku atau memaksimalisasi keuntungan. Adapun keinginan untuk
memecahkan masalah dengan model optimasi secara umum sudah digunakan pada
Program Linier.
Program linier merupakan model umum yang dapat digunakan dalam
pemecahan masalah pengalokasian sumber-sumber yang terbatas secara optimal.
Masalah tersebut timbul apabila seseorang diharuskan untuk memilih atau
menentukan tingkat setiap kegiatan yang akan dilakukannya, di mana
masing-masing kegiatan membutuhkan sumber yang sama sedangkan jumlahnya terbatas.
Secara sederhana, dapat diambil contoh bagian produksi suatu perusahaan yang
dihadapkan pada masalah penentuan tingkat produksi masing-masing jenis produk
dengan memperhatikan batasan faktor-faktor produksi: mesin, tenaga kerja, bahan
mentah, dan sebagainya untuk memperoleh tingkat keuntungan maksimal atau
biaya yang minimal.
Pada masa modern sekarang, program linier masih menjadi pilihan dalam
upaya untuk memperoleh tingkat keuntungan maksimal atau biaya yang minimal.
Dalam memecahkan masalah di atas, Program linier menggunakan model
matematis. Sebutan “linier” berarti bahwa semua fungsi matematis yang disajikan
dalam model ini haruslah fungsi-fungsi linier. Dalam Program linier dikenal dua
macam fungsi, yaitu fungsi tujuan (objective function) dan fungsi-fungsi batasan
(constraint function). Fungsi tujuan adalah fungsi yang menggambarkan
tujuan/sasaran di dalam permasalahan program linier yang berkaitan dengan
pengaturan secara optimal sumber daya-sumber daya, untuk memperoleh
keuntungan maksimal atau biaya minimal. Pada umumnya nilai yang akan
dioptimalkan dinyatakan sebagai Z. Fungsi batasan merupakan bentuk penyajian
secara matematis batasan-batasan kapasitas yang tersedia yang akan dialokasikan
secara optimal ke berbagai kegiatan.
Agar dapat menyusun dan merumuskan suatu persoalan atau permasalahan
yang dihadapi ke dalam model program linier, maka ada lima syarat yang harus
1. Tujuan
Apa yang menjadi tujuan permasalahan yang dihadapi yang ingin
dipecahkan dan dicari jalan keluarnya. Tujuan ini harus jelas dan tegas yang
disebut fungsi tujuan.
2. Alternatif perbandingan
Harus ada sesuatu atau berbagai alternatif yang ingin diperbandingkan;
misalnya antara kombinasi waktu tercepat dan biaya tertinggi dengan waktu
terlambat dan biaya terendah.
3. Sumber daya
Sumber daya yang dianalisis harus berada dalam keadaan yang terbatas
4. Perumusan kuantitatif
Fungsi tujuan dan kendala harus dapat dirumuskan secara kuantitatif
dalam apa yang disebut model matematika.
5. Keterkaitan peubah
Peubah-peubah yang membentuk fungsi tujuan dan kendala tersebut harus
memiliki hubungan fungsional atau hubungan keterkaitan.
Model Dasar
Model dasar program linier dapat dirumuskan sebagai berikut:
Carilah nilai-nilai x1,x2, ,xj yang dapat menghasilkan berbagai
)
Dengan syarat bahwa fungsi tujuan tersebut memenuhi kendala-kendala
atau syarat-syarat ikatan sebagai berikut:
1
c Parameter yang dijadikan kriteria optimisasi, atau koefisien peubah
pengambilan keputusan dalam fungsi tujuan.
j
x Peubah pengambilan keputusan atau kegiatan (yang ingin dicari;
yang tidak diketahui).
ij
a Koefisien teknologi peubah pengambilan keputusan (kegiatan yang
bersangkutan) dalam kendala ke-i.
Asumsi – asumsi program linier
1. Linieritas
Asumsi ini menginginkan agar perbandingan antara input yang satu
dengan input lainnya, atau untuk suatu input dengan output besarnya tetap dan
terlepas (tidak tergantung) pada tingkat produksi.
2. Proposionalitas
Asumsi ini menyatakan bahwa jika peubah pengambilan keputusan, xj
berubah maka dampak perubahannya akan menyebar dalm proposi yang sama
terhadap fungsi tujuan, cjxj, dan juga pada kendalanya, aijxj.
3. Aditivitas
Asumsi ini menyatakan bahwa nilai parameter suatu kriteria optimisasi
(koefisien peubah pengambilan keputusan dalam fungsi tujuan) merupakan
jumlah dari nilai individu-individu c j dalam model PL tersebut.
4. Divisibilitas
Asumsi ini menyatakan bahwa peubah-peubah pengambilan keputusan
j
X , jika diperlukan dapat dibagi ke dalam pecahan-pecahan.
5. Deterministik
Asumsi ini menghendaki agar semua parameter dalam PL (yaitu nilai –
nilai cj, aij , dan bi) tetap dan dikehendaki atau ditentukan secara pasti.
Metode Simpleks
Apabila suatu masalah Linier Programming hanya mengandung dua kegiatan
(variabel-variabel keputusan) saja, maka dapat diselesaikan dengan metode grafik.
lagi, sehingga diperlukan metode simpleks. Metode ini lazim dipakai untuk
menentukan kombinasi dari tiga variabel atau lebih.
Masalah Program linier yang melibatkan banyak variabel keputusan dapat
dengan cepat dipecahkan dengan bantuan komputer. Bila variabel keputusan yang
dikandung tidak terlalu banyak, masalah tersebut dapat diselesaikan dengan suatu
algoritma yang biasanya sering disebut metode tabel simpleks. Disebut demikian
karena kombinasi variabel keputusan yang optimal dicari dengan menggunakan
tabel-tabel.
Tabel 2.1 Bentuk tabel simpleks
j
Sebelum menyelesaikan suatu tabel simpleks terlebih dahulu menginisialisasikan
dan merumuskan suatu persoalan keputusan kedalam model matematik persamaan
linier, caranya sebagai berikut:
1. Konversikan semua ketidaksamaan menjadi persamaan.
Agar persamaan garis batasan memenuhi persyaratan penyelesaian pada daerah
kelayakan (feasible) maka model program linier diubah menjadi suatu model yang
sama dengan menambahkan variabel slack, surplus dan variabel buatan (artificial
variabel) pada tiap batasan (constraint) serta memberi harga nol kepada setiap
koefisien C nya. Batasan dapat di modifikasi sebagai berikut:
a. Untuk batasan bernotasi dapat dimodifikasikan kepada bentuk persamaan dengan menambahkan variabel slack ke dalam nya.
b. Untuk batasan bernotasi atau diselesaikan dengan menambahkan variabel surplus dan variabel buatan. Dengan penambahan variabel
buatan ini akan merusak sistem batasan, hal ini dapat diatasi dengan
membuat suatu bilangan besar M sebagai harga dari variabel buatan
tersebut dalam fungsi tujuan. Jika persoalan maksimal maka dibuat –M
sebagai harga, dan jika persoalan minimal dibuat +M sebagai harga dari
variabel buatan. Cara pendekatan ini dikenal dengan metode M besar
(Big M method).
Penambahan variabel slack dan variabel buatan (artificial variabel) pada tiap
batasan (constrain) untuk persoalan maksimal dapat dirumuskan sebagai berikut:
n j
xj 0, 1, , ; xi bi,i 1,,m ; Bi bi,i m1 1,,m
2. Menyusun persamaan – persamaan di dalam tabel awal simpleks.
Tabel 2.2 Bentuk tabel awal simpleks sebelum pivoting
j
simpleks adalah sebagai berikut:
Langkah 1 : Mengecek nilai optimal imbalan.
Untuk persoalan maksimal : zk ck = minimal {zj cj : j R}.
Jika zk ck 0 maka selesai, berarti jawab atau solusi sudah optimal.
Untuk persoalan minimal : zk ck = maksimal {zj cj : j R}.
Jika zk ck 0 maka selesai, berarti jawab atau solusi sudah optimal.
j
a Koefisien dari semua variabel dalam sistem batasan.
Bi
c Harga dari variabel.
Langkah 2 : Menentukan variabel yang akan masuk dalam basis.
Untuk persoalan maksimal jika terdapat beberapa zj cj 0
maka kolom yang menjadi kolom pivot adalah kolom dengan zj cj terkecil, dan
variabel yang sehubungan dengan kolom pivot adalah variabel yang masuk
kedalam basis. Untuk persoalan minimal jika terdapat beberapa zj cj 0 maka
kolom yang menjadi kolom pivot adalah kolom dengan zj cj terbesar, dan
variabel yang sehubungan dengan kolom pivot adalah variabel yang masuk ke
dalam basis.
Langkah 3 : Menentukan variabel yang akan keluar dari basis.
Menetapkan variabel yang keluar dari basis yaitu :
pivot yang demikian adalah variabel yang keluar dari basis.
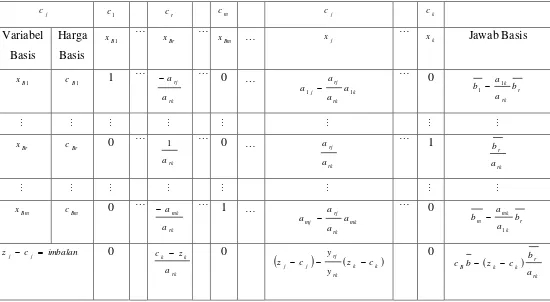
Langkah 4 : Menyusun tabel simpleks baru.
Untuk menyusun tabel simpleks yang baru, maka harus mencari
koefisien elemen pivot dari tabel simpleks sebelumnya. Koefisien elemen pivot
dapat dicari dengan menghubungkan kolom pivot dengan baris pivot sedemikian
elemen pivot, Koefisien – koefisien baris pivot baru dapat dicari dengan
menggunakan rumus sebagai berikut :
rk rj
a a
(2.9)
Untuk menghitung nilai baris baru lainnya dilakukan dengan menggunakan rumus
sebagai berikut :
Langkah 5 : Mengecek nilai optimal imbalan dari tabel simpleks yang baru.
Jika imbalan sudah optimal maka tafsirkan hasil penyelesaian, jika
belum optimal maka kembali kepada langkah 2.
Tabel 2.3 Bentuk tabel simpleks sesudah pivoting
BAB 3
PEMBAHASAN
3.1 Hubungan Program Linier Pecahan dengan Program Linier
Program Linier Pecahan (PLP) adalah generalisasi dari Program Linier
(PL). Fungsi tujuan dari program linier berbentuk fungsi linier, sedangkan fungsi
tujuan dalam program linier pecahan merupakan rasio dari dua fungsi linier.
Program linier pecahan merupakan menjadi kelas khusus dari program linier.
Dikatakan kelas khusus karena program linier pecahan dapat ditransformasikan
kedalam bentuk linier dimana fungsi penyebut pada fungsi tujuan program linier
pecahan bernilai 1 dan persamaan penyebut dalam fungsi tujuan dimasukkan
kedalam persamaan fungsi kendala.
Program linier dan program linier pecahan merupakan masalah optimasi
yang menggunakan persamaan dan pertidaksamaan linier dan masing-masing
persoalannya memiliki daerah feasible. Pada umumnya, program linier
menghitung kebijakan untuk mencari laba maksimum atau biaya minimum.
Sedangkan pada program linier pecahan digunakan untuk menghitung rasio
efisiensi optimal seperti keuntungan/biaya. Program linier pecahan bertujuan
mencari rasio dari 2 buah fungsi tujuan dalam program linier untuk mendapatkan
hasil yang optimal. Sebagai contoh dalam konteks program linier adalah
memaksimalkan keuntungan pada fungsi tujuan yaitu, keuntungan = pendapatan
– biaya. Apabila pada program linier keuntungan maksimum yang didapat adalah Rp 100.000 (= Rp 1.100.000 pendapatan – Rp. 1000.000 biaya). Dengan
demikian, pada program linier memiliki efisiensi sebesar Rp 100.000 / Rp
1000.000 = 0,1. Apabila menggunakan PLP mungkin bisa meningkatkan efisiensi
sebesar Rp 10.000 / Rp. 50.000 = 0,2 dengan keuntungan hanya Rp 10.000, yang
3.2 Transformasi Charnes-Cooper
Program Linier Pecahan merupakan kelas khusus dari progam non linier. Charnes
dan Cooper memperkenalkan transformasinya untuk mengubah bentuk non linier
program linier pecahan kebentuk program linier. Dimana fungsi penyebutnya
adalah bernilai 1. Setelah di transformasikan maka fungsi penyebutnya
dimasukkan kedalam fungsi kendala.
Bentuk umum masalah program linier pecahan adalah sebagai berikut:
Maksimumkan = a1 1+a2 2+⋯+ak +ak +1
c1 1+c2 2+⋯+ck +ck +1
Kendala 1 1+⋯+ …. (1)
1 0,…, 0
dimana adalah matriks 1 x m, untuki=1,…,k dan b adalah m-dimensi konstanta
vektor kolom.
Maka itu, diasumsikan bahwa:
1 1+ 2 2+⋯+ + +1> 0 untuk semua � = ( 1,…, ) ∈ �, Dimana X
hasil daerah feasible dari persamaan (1).
Untuk menyelesaikan persamaan (1). Transformasi Charnes-Chooper menetapkan
untuk:
= 1
1 1+ 2 2+⋯+ + +1
1 1 + 2 2 +⋯+ + +1 = 1
Sehingga, persamaan (1) ditransformasikan kedalam permasalahan program linier:
Maksimumkan = 1 1 + 2 2 +⋯+ + +1
Kendala 1 1 +⋯+
1 1 + 2 2 +⋯+ + +1 = 1
1 0,…, 0, 0
…. (2)
Dengan diasumsikan variabel = 1
1 1+ 2 2+⋯+ + +1 =
untuk i=1,…,k,
persamaan (2) dapat di reduksi menjadi:
Maksimumkan = 1 1 + 2 2 +⋯+ + +1
Kendala 1 1+⋯+
1 1+ 2 2 +⋯+ + +1 = 1
1 0,…, 0, 0…. (3)
(Borza, 2012)
3.3 Program Linier Pecahan Dengan Fungsi Tujuan Berkoefisien Interval
Pada beberapa masalah aplikasi program linier, koefisien pada model
seringkali tidak bisa ditentukan secara tepat. Jadi dalam kasus seperti itu, jauh
lebih baik untuk memilih koefisien sebagai interval bukan merupakan angka tetap.
Sebagai contoh salah satu dari situasi ini terjadi ketika koefisien bilangan fuzzy.
Dalam kasus ini jika pengambil keputusan menetapkan α-tingkat kepuasan, maka bilangan fuzzy diubah menjadi interval. Oleh karena itu, dalam berbagai situasi
seperti itu untuk menyelesaikan permasalahan dalam bentuk pemrograman
matematika dengan koefisien interval. Salah satu metode dalam menyelesaikan
masalah PL ini adalah dengan menggunakan pendekatan interval, dimana
dinamakan Linier Programming with Interval Coefficient (LPIC). Koefisien
berbentuk interval menandakan perluasan toleransi (atau daerah) dimana
parameter konstanta bisa diterima dan memenuhi model LPIC. (Farida, 2011)
Sehingga permasalahan optimasi program linier pecahan dengan fungsi
tujuan berkoefisien interval merupakan kombinasi persoalan program linier
pecahan dengan program linier dengan koefisen interval. Sehingga persamaan
persoalan tersebut dapat dituliskan menjadi:
Maksimumkan Z = [ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1]
[ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1]
(k= 1,2,3,…m ) dan ( j= 1,2,3,…n)
Kendala 1 1+⋯+
1 0,…, 0
… (4)
Untuk menyelesaikan permasalahan ini diasumsikan bahwa [ 1, 1] 1+
[ 2, 2] 2+⋯+ [ , ] + [ +1, +1] > 0 untuk semua � = 1,…, ∈
�, dimana X adalah daerah feasible kompak,
Untuk menyelesaikan persamaan (4), diasumsikan variabel
t = 1
[ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1]
sehingga diperoleh:
Maksimumkan = [ 1, 1] 1 + [ 2, 2] 2 +⋯+ [ , ] + [ +1, +1]
Kendala 1 1 +⋯+ t
[c1,d1] 1 + [c2, d2] 2 +⋯+ [ck,dk] + [ck+1,dk+1] = 1
1 0,…, 0, 0
Dengan diasumsikan variabel = 1
[ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1]=
untuk i=1,…,k, persamaan (5) dapat di reduksi menjadi:
Maksimumkan = [ 1, 1] 1+ [ 2, 2] 2+⋯+ [ , ] +
[ +1, +1]
Kendala 1 1+⋯+ t
[ 1, 1] 1+ [ 2, 2] 2+. . . +[ , ] + [ +1, +1] = 1
1 0,…, 0, 0
… (6)
Kombinasi linier dari masing-masing daerah interval mengikuti persamaan:
Maksimum = [ 1 1+ (1− 1) 1] 1+ [ 2 2 + (1− 2) 2] 2+⋯+
[ + (1− 1) ] + [ +1 +1+ (1− +1) +1]
Kendala 1 1+⋯+ − 0
[ 1 1+ (1− 1) 1] 1+ [ 2 2+ (1− 2) 2] 2+⋯+ [ +
(1− ) ] + [ +1 +1+ (1− +1) +1] = 1
1 0,…, 0, 0, 0 1 ,… , 0 1, untuk
i=1,…,k+1
…(7)
Dari persamaan (7). Pada fungsi kendala dapat di reduksi menjadi:
[ 1 1+ (1− 1) 1] 1+⋯+ [ + (1− ) ] + [ +1 +1 + (1 − +1) +1] = 1
[ 1 1 1 + 1 1− 1 1 1+⋯+ 1+ − + +1 +1
[ 1 1 1 − 1 1 1]+…+ [ 1− ] + [ +1 +1 − +1 +1 ] +
1 1+⋯+ + +1 = 1
[ 1 1 1− 1 +⋯+ − + +1 +1 − +1 ] + 1 1+⋯
+ + +1 = 1
… (8)
Karena,
0 untuk = 1,…, , 0, 0 βi 1, − 0 untuk = 1,…, +
1
Oleh karena itu persamaan (8) dapat ditulis:
1 1 + [ 1 1 1− 1 +⋯+ − + +1 +1− +1 ]
1 + 1 1− 1 +⋯+ − + +1− +1 ]
…(9)
Dengan mengkombinasikan persamaan (8) dan (9) menghasilkan:
1 1 1 +⋯+ + +1
1 + 1 1− 1 +⋯+ − + +1− +1
… (10)
Yang selanjutnya direduksi menjadi:
1 1+⋯+ + +1 1
…(11)
Dan
1 1+⋯+ + +1 1
Oleh karena itu, dengan menggunakan persamaan (11) dan (12), persamaan (7)
ditransformasikan kedalam persamaan berikut:
Maksimumkan = [ 1 1+ (1− 1) 1] 1+ [ 2 2 + (1− 2) 2] 2+⋯+
[ + (1− 1) ] + [ +1 +1+ (1−
+1) +1]
Kendala c1 1+⋯+ ck + ck+1 1
d1 1+⋯+ dk + dk+1 1
1 1+⋯+ − 0
1 0,…, 0, 0, 0 αi 1 untuki=1,…,k+1
… (13)
Jika ( 1,…, , ) menjadi titik daerah feasible dari persamaan (13),
dengan 0 1, − 0 untuk i=1,…,k+1, maka fungsi objektif dalam
persamaan (13) dapat ditulis sebagai:
1 1 1− 1 +⋯+ − + +1 +1− +1 ] +b1 1+⋯+
bk + bk+1 1 1− 1 +⋯+ − + +1− +1 ] +b1 1+
⋯+ bk + bk+1 = a1 1+⋯+ ak + ak+1
Persamaan diatas membuktikan bahwa 1, 2,…, +1 merupakan batas
bawah dari koefisien interval pada fungsi tujuan. Maka worst optimum pada
persamaan fungsi tujuan adalah Z= a1 1+⋯+ ak + ak+1
Sehingga bentuk transformasi optimasi program linier pecahan dengan fungsi
tujuan berkoefisien interval adalah
Maksimumkan Z= 1 1 +⋯+ + +1
Kendala 1 1+⋯+ + +1 1
1 1+⋯+ + +1 1
1 0,…, 0, 0, untukk=1,…,m
Sedangkan untuk memperoleh best optimum maka diambil batas atas dari
koefisien interval pada fungsi tujuan. Sehingga bentuk transformasi optimasi
program linier pecahan dengan fungsi tujuan berkoefisien interval adalah
Maksimumkan Z= 1 1+⋯+ + +1
Kendala 1 1+⋯+ + +1 1
1 1+⋯+ + +1 1
1 1+⋯+ − 0
1 0,…, 0, 0, untukk=1,…,m
Berikut akan dibuktikan bahwa Program linier pecahan dengan fungsi tujuan
berkoefisien interval dibawah ini sama dengan metode Charnes-Cooper.
Maksimumkan Z=[ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1]
[ 1, 1] 1+[ 2, 2] 2+⋯+[ , ] +[ +1, +1]
Kendala 1 1+⋯+
1 0,…, 0
(k= 1,2,…,m ) dan( j= 1,2,…,n)
Bukti:
Karena koefisien interval pada pembilang fungsi tujuan memiliki nilai yang sama.
Nilai koefisien fungsi tujuan pada best optimum dan worst optimum adalah sama.
Maka persoalan optimasi program linier pecahan dengan fungsi tujuan
berkoefisien interval diatas dapat ditransformasikan menjadi:
Maksimumkan Z= 1 1 +⋯+ + +1
1 1+⋯+ + +1 1
1 1+⋯+ − 0
1 0,…, 0, 0, untukk=1,…m
Karena koefisien ruas kiri persamaan pertama dan kedua pada fungsi kendala
sama, Maka persamaan pertama dan kedua dikombinasikan, sehingga diperoleh
persamaan program liniernya menjadi:
Maksimumkan Z= 1 1+⋯+ + +1
Kendala 1 1+⋯+ + +1 = 1
1 1+⋯+ − 0
1 0,…, 0, 0, untuk = 1,…,
Sehingga terbukti bahwa optimasi program linier pecahan dengan fungsi tujuan
berkoefisien interval sesuai dengan bentuk transformasi yang diperkenalkan oleh
Charnes dan Cooper. (Borza, 2012)
Kasus 1
PT Sayang Anak memproduksi dua jenis mainan yang terbuat dari kayu
yang berupa boneka dan kereta api. Boneka dijual dengan harga Rp 27.000 -
35.000/ lusin yang setiap lusinnya memerlukan biaya material sebesar Rp
10.000-14.000 serta biaya tenaga kerja sebesar Rp 10.000-14.000-16.000. Kereta api yang dijual
seharga Rp 21.000 -30.000/ lusin memerlukan biaya material sebesar Rp
9.000-12.000 dan biaya tenaga kerja Rp 10.000-13.000. Apabila perusahan dikenai pajak
pembuatan sekitar Rp 5000-8000. Untuk membuat boneka dan kereta api ini
diperlukan dua kelompok tenaga kerja, yaitu tukang kayu dan tukang poles. Setiap
lusin boneka memerlukan 2 jam pemolesan dan 1 jam pekerjaan kayu, sedangkan
setiap lusin kereta api memerlukan 1 jam pemolesan dan 1 jam pekerjaan kayu.
Meskipun pada setiap minggunya perusahaan ini dapat memenuhi seluruh
dan 80 jam untuk pekerjaan kayu. Dari pengamatan pasar selama ini dapat
dikatakan bahwa kebutuhan akan kereta api tidak terbatas, tetapi untuk boneka
tidak lebih dari 40 lusin yang terjual setiap minggunya. Bagaimanakah formulasi
dari persoalan di atas untuk mengetahui berapa lusin jenis mainan masing-masing
yang harus dibuat setiap minggu dengan mengoptimalkan efisiensi
keuntungan/pendapatan ?
(dikutip dari Bu’ulolo, 2005; dengan modifikasi)
Solusi:
Fungsi Tujuan
Fungsi tujuan merupakan fungsi dari variabel keputusan yang akan
dimaksimumkan (untuk pendapatan atau keuntungan) atau diminimumkan (untuk
ongkos). Pada persoalan ini akan dimaksimumkan (pendapatan/minggu) –
(ongkos material/minggu) – (ongkos tenaga kerja/minggu).
Pendapatan dan ongkos-ongkos ini dapat diekspresikan dengan menggunakan
variabel keputusan x1 dan x2 sebagai berikut :
Pendapatan /minggu = [27, 35] x1 + [21, 30] x2
Ongkos material/minggu = [10, 14] x1 + [9, 12] x2
Ongkos tenaga kerja/minggu = [14,16] x1 + [10,13] x2
Pajak = [5, 8]
Sehingga yang akan dimaksimumkan adalah :
Pendapatan = [27, 35] x1 + [21, 30] x2
Biaya = [10+14, 14+16] x1 + [9+10, 12+13] x2 + [5, 8]
=[24, 30] x1 + [19, 25] x2 + [5, 8]
Fungsi biaya dapat disimbolkan dengan g(x). Sehingga untuk menyatakan
g(x) = [24, 30] x1 + [19, 25] x2 + [5, 8]
Keuntungan = Pendapatan – Biaya
= [3, 5] x1 + [2, 5] x2 + [-8, -5]
dimana fungsi keuntungan disimbolkan dengan fungsi f(x). Sehingga untuk
menyatakan persamaan fungsi tujuan dari keuntungan dapat ditulis:
Untuk menyatakan nilai fungsi tujuan akan digunakan variabel Z dan dapat
ditulis:
Maksimumkan f(x) = Z = [3, 5] x1 + [2, 5] x2 + [-8, -5]
Sehingga persamaan fungsi tujuan diatas merupakan bentuk fungsi tujuan model
LPIC
Pembatas
Pembatas merupakan kendala yang dihadapi sehingga kita tidak bisa menentukan
harga-harga variabel keputusan secara sembarang. Pada persoalan di atas ada 3
pembatas yang dihadapi yaitu :
Pembatas 1 : Setiap minggu tidak lebih dari 100 jam waktu pemolesan yang
dapat digunakan.
Pembatas 2 : Setiap minggu tidak lebih dari 80 jam waktu pengerjaan kayu yang
dapat digunakan.
Pembatas 3 : Karena permintaan yang tebatas, maka tidak lebih dari 40 lusin
boneka yang dapat dibuat setiap minggu. Jumlah material yang dapat digunakan
diasumsikan tidak terbatas sehingga tidak ada pembatas untuk hal ini.
Dengan menggunakan simbol matematik dapat ditulis :
Pembatas 1 : 2x1 + x2 100
Pembatas 2 : x1 + x2 80
Pembatas Tanda
Pembatas tanda adalah yang menjelaskan apakah variabel keputusannya
diasumsikan hanya berharga nonnegatif atau variabel keputusan boleh berharga
positif, boleh juga negatif. Pada contoh diatas kedua variabel keputusan harus
berharga nonnegatif sehingga harus dinyatakan bahwa : x1 0 dan x2 0
Dengan demikian, formulasi lengkap dari persoalan PT Sayang Anak adalah :
Maksimumkan Z = [3, 5] x1 + [2, 5] x2 + [-8, -5]
Kendala
2 x1 + x2 100
x1 + x2 80
x1 40
x1 0 , x2 0
Setelah dicapai solusi optimum untuk x1= 20, dan x2= 60 dan Z= [172, 395].
Sehingga keuntungan maksimum yang diperoleh PT Sayang Anak diantara Rp
172.000 hingga Rp 395.000 dengan modal investasi sebesar 1.625.000 hingga Rp
2.108.000. Sehingga efisiensi dari keuntungan dan biaya PT Sayang Anak adalah
172.000/1.625.000= 0.1058 pada worst optimum. Sedangkan efisiensi pada best
optimum diperoleh sebesar 395.000/2.108.000= 0.1873.
Dengan menggunakan optimasi program linier pecahan dengan fungsi tujuan
berkoefisien interval dapat meningkatkan rasio dari efisiensi keuntungan dan
Maka bentuk persamaan optimasi program linier pecahan dengan fungsi tujuan
berkoefisien interval adalah
Maksimumkan Z= ( )
( ) =
[3, 5] 1 + [2,5] 2 + [−5, −8]
[24,30] 1 + [19,25] 2 +[5, 8]
Kendala
2 x1 + x2 100
x1 + x2 80
x1 40
x1 0 , x2 0
Transformasi optimasi program linier pecahan dengan fungsi tujuan berkoefisien
interval-nya menjadi:
Maksimumkan Z= [3, 5] 1 + [2, 5] 2 + [−8,−5]
Kendala 24 1+ 19 2+ 5 1
34 1+ 25 2+ 8 1
2 1+ 2−100 0
1+ 2−80 0
1 −40 0
Sehingga bentuk persamaan program linier untuk memperoleh efisiensi best
optimum-nya adalah
Maksimumkan Z= 5 1 + 5 2 -5t
Kendala 24 1+ 19 2+ 5 1
34 1+ 25 2+ 8 1
2 1+ 2−100 0
1+ 2−80 0
1−40 0
1 0, 2 0, 0
Dari perhitungan program linier diatas maka diperoleh nilai rasio efisiensi best
optimum dari keuntungan dan biaya dengan solusi 1 = 0, 2 = 0.0525, =
0.0007 dan = 0.259. Efisiensinya meningkat dari 0.1873 menjadi 0.259.
Dengan memproduksi mainan kereta api sebanyak x2= 2=
0.0525
0.0007 = 75
biaya modal sebesar Rp 1.883.000 dan keuntungan sebesar Rp 367.000.
Sedangkan untuk worst optimum-nya maka bentuk transformasi optimasi program
linier pecahan dengan fungsi tujuan berkoefisien interval adalah
Maksimumkan Z= 3 1 + 2 2 + -8t
Kendala 24 1+ 19 2+ 5 1
34 1 + 25 2+ 8 1
2 1 + 2−100 0
1+ 2−80 0
1−40 0
Dari persamaan program linier diatas maka diperoleh rasio tertinggi worst
optimum untuk efisiensi keuntungan dan biaya dengan solusi 1 = 0.0415, 2 =
0, = 0.001 dan = 0.1161. Meningkat dari 0.1058 menjadi 0.1161. Dengan
memproduksi mainan boneka sebanyak x1= 1 =
0.0415
0.001 = 41 , dengan biaya
modal sebesar Rp 992.000 dan keuntungan sebesar Rp 115.000.
Kasus 2
Tentukan solusi dar optimasi program linier pecahan dibawah ini!
Maksimumkan Z = ( )
( ) =
[1.5,3] 1+3,4 2+[5, 6]
0.5,2.5 1+1.5,3 2+[2,4]
Kendala −2 1+ 2 3
2 1+ 3 2 10
1− 2 4
1 0, 2 0
Ditransformasikan kedalam bentuk transformasi optimasi program linier pecahan
dengan fungsi tujuan berkoefisien interval menjadi:
Maksimumkan Z= [1.5, 3] u1 + [3, 4] u2 + [5, 6]t
Kendala: 0.5 1+ 1.5 2+ 2 1
2.5 1+ 3 2+ 4 1
−2 1+ 2 −3 0
2 1+ 3 2−10 0
1− 1−4 0
Untuk memperoleh best optimum dari program linier yang memiliki fungsi tujuan
yang berbentuk LPIC. Maka diambil batas atas dari koefisien interval pada fungsi
tujuan sehingga persamaan program liniernya menjadi:
Maksimumkan Z= 3 1 + 4 2 + 6
Kendala 0.5 1+ 1.5 2+ 2 1
2.5 1+ 3 2+ 4 1
−2 1+ 2−3 0
2 1+ 3 2−10 0
1− 1−4 0
1 0, 2 0, 0
Dari persamaan program linier diatas maka diperoleh solusi 1 = 1, 2 = 0, =
0.25 dan = 4.5. Nilai optimal dari fungsi tujuan adalah 4.5 dengan nilai pada
titik x1= 1=
1
0.25= 4 sedangakan pada titik x2 adalah 0.
Sedangkan untuk menentukan nilai worst optimum diambil nilai batas bawah dari
koefisien interval. Sehingga persamaan program liniernya menjadi:
Maksimukan Z= 3 1 + 4 2 + 6
Kendala 0.5 1+ 1.5 2+ 2 1
2.5 1+ 3 2+ 4 1
−2 1+ 2 −3 0
2 1+ 3 2−10 0
1− 1−4 0
Dari persamaan diatas maka diperoleh untuk nilai worst optimum pada fungsi
tujuan adalah dengan solusi 1 = 1, 2 = 0, = 0.25 dan = 2.75. Nilai
optimal dari fungsi tujuan adalah 2.75 dengan nilai pada titik x1= 1 =
1
0.25 = 4
sedangakan pada titik x2 adalah 0.
Dari contoh kasus diatas dapat dilihat bahwa optimasi program linier pecahan
dengan fungsi tujuan berkoefisien interval menghasilkan nilai optimal yang lebih
baik dibandingkan penyelesaian dengan metode optimasi program linier biasa.
Hal ini disebabkankan oleh faktor koefisien yang berada dalam interval, sehingga
pemilihan nilai terbaik lebih fleksibel.
Dengan demikian nilai optimum yang dihasilkan dari suatu nilai dalam interval
dapat memberikan hasil yang lebih baik daripada nilai optimum yang dihasilkan
dari satu koefisien tertentu. Hal ini meningkatkan efisiensi biaya pada masalah
BAB 4
KESIMPULAN DAN SARAN
4.1 Kesimpulan
Kesimpulan yang dapat diperoleh dari uraian di atas adalah sebagai berikut:
1. Optimasi program linier pecahan dengan fungsi tujuan berkoefisien
interval menghasilkan nilai optimal yang lebih baik dibandingkan
penyelesaian dengan metode optimasi program linier biasa.
2. Interval dapat digunakan sebagai pengganti koefisien yang sulit
ditentukan.
4.2 Saran
1. Optimasi Program linier pecahan dengan fungsi tujuan berkoefisien
interval lebih baik digunakan dari program linier dan LPIC dalam
DAFTAR PUSTAKA
Borza, M. 2012. Solving Linear Fractional Programming Problems with Interval Coefficients in the Objective Function.Applied Mathematical Sciences. 6(69): 3443 – 3452
Bu’ulolo, F. 2005. “ Analysis Sensitivitas pada Program Integer Campuran”.
Jurnal Sistem Teknik Industri (Nomor 4 tahun 2005). Hlm. 78-84.
Charnes, A. and Cooper, W.W. 1962. Programming with linear fractional functions, Naval Research Logistics Quaterly. 9: 181-186.
Chinneck, J.W. dan Ramadan, K. 2000. Linear Programming with Interval Coefficients. Journal of the Operational Research Society. 51: 209–220.
Farida, A. 2011. “Pengoptimuman pada Masalah Pemrograman Linear dengan Koefisien Interval ”. Sekolah Pascasarjana-IPB.
Khaled, R. 1996. Linear Programming with Interval Coefficients. Thesis, Carleton University
Saprida, M. 2009. “Analisis Sensitivitas dan Ketidakpastian dalam Program
Linear”.Tesis. Sekolah Pascasarjana-USU.
Stancu-Minasian, I.M. 1997. Fractional Programming: Theory, Methods and Applications. Dordrecht: Kluwer Academic Publishers.
Winston, W.L,. 2003. Operations Research: Applications and Algorithms, edisi-4,
LAMPIRAN A. Tampilan Data Input dan Output QM for Windows untuk Penyelesaian Maksimasi Program Linier Contoh 1
Module/Submodule: Linear Programming
Problem title: Best Optimum Kasus 1
Data and Summary --- Data
Module/Submodule: Linear Programming
Problem title: Worst Optimum Kasus 1
Data and Summary --- Data
LAMPIRAN B. Tampilan Data Input dan Output QM for Windows untuk Penyelesaian Maksimasi Program Linier Kasus 2
Module/Submodule: Linear Programming
Problem title: Best Optimum Kasus 2
Data and Summary --- Data
Module/Submodule: Linear Programming
Problem title: Worst Optimum Contoh 2
Data and Summary --- Data