SISTEM PENJEJAK
POSISI
OBYEK
BERBASIS
UMPAN
BALIK
CITRA
Syahrull,
Andi
Kurniawan'1,,
J.,rusa, Teknik Komputer, Fakultas Teknik dan
Ilmu
Komputer, Universitas KomPuter IndonesiaJl. Dipati Ukur No.1 16, Bandung 40132
Telepon (022) 25-O 41 19, 250337
l,
250 6634, Fax (022) 25337 5 4sYahrul-sYIGYahoo'
comAbstrak
Makalah
ini
memaparkan hasil penelitian tentang Perancangan dan Realisasi Sistem Penjejak(tracking) Posisi
olyek
dengan-Menggunakan Bantuan Pemrosesan Citra. Keberadaan bendadideteksi
oleh
sensorvisuaL
pengambilancitra
bendadilalrukan
dengan mengkondisikan perubahan parameter tertentu terhadap benda yang diamati. Penelitianini
bertujuan untuk-.*U*g,rn
sebuah sistem pendetekiian keberadaan benda dengan menggunakan kamera sebagai ,-.rrro. visual. Metode yang digunakan adalah dengan memanfaatkan pemlosesan citra(imige
processing)untuk
melakukan pendeteksian keberadaan benda yang akan disorot dandiikuii
iase, pointer yang dikendalikan oleh mikrokontroler. Kamera yang terhubung dengan komputer*.lului
t<aUeiUSg
akan melakukancaptue
padabendayaflg
beradadi
sebuahffuri.
Citra hasil capture diproses oleh aplikasi image processing menggunakan peruogramanbelphi
untuk menjhasilkan
data koord-inat yang akan menentukan keberadaan benda padaprrit.
Datakoordiiat
akandikirimkan ke
mikrokontroleruntuk
menggerakkan laser pointeri.ng*
menggunakan motor stepper. Ketepatan posisi penjejakan laser pointer terhadap bendaur.ui
ait""jrli*
olehtitik
koordinatX
dan Y yang diperoleh dari hasil pemrosesan citra.Kata
kunciz Penieiakan, Pemrosesan Citra, Komputer,Mikrokontroler
1. Pendahuluan
Citra atau gambar sebagai salah satu komponen multimedia memegang peranan sangat
penting
sebagaibentuk infbrmasi visual.
Data
yang
berupa gambar dapal
memberikanil.t..uiu
info'rmasi
sekaligusmisalnya warna,
bentuk,jumlah, dan letak
benda' Teknikp.*or.r*
citra
ata-uguriU*
y*g
ti*u
dipergunakanuntuk
melalcukan pemanipulasianiiiru
ug*
menjadigambl
y*g
aiit
ginkan danteknikini
dilakukan dengan bantuan komputerdan su"atu perangkat
lunakyang
diterapkan untuk memperoleh informasi tertentu dari bendayang diamati.
Sistem
yang
dibangun
ini
berdasarkan pada penggunaan pemrosesancitra
(imageprocessing)yang
selanjrtl,u
akan {igunakan untuk mendeteksi perubahan gerak pada suatuobyek. Perancangan sistem pendeteksi posisi benda.ini menggunakan kamera.webcam yang
difungsikan
sebalai
sensorvisual.
Karina itu
diperlukan suatu cara agar hasildari
gambary"rg
iit*gkap
oieh kamera webcam dapat diproses kembali oleh komputer untuk dikirimkanke
mikrokontroler
g*u
*"nggerakkar
lasei
pointer
menuju ke
posisi-benda berdasarkankoordinat
X
danY.bari
p.ngotrt*
tersebut, data yang diperoleh kemudian dijadikan acuan untuk melakukan suatu tindakan.vol,
13, NO 1, APRrL 2012Pada
penelitian
ini
dirancangdan
direalisasikan suatualat
banruuntuk
mendeteksi keberadaan/posisi benda atau obyek dengan menggunakan pemrosesan citra 1-ang selanjutnya akan dilacak dandiikuti
(tracking) oleh penjejak melalui laser pointrzr. Dengan alat bantu inidiharapkan dapat menjadi salah satu alternatif dalam melacak suatu obl.ek dan menentukan posisi obyek berdasarkan koordinat
Xy.
2.
Metode PenelitianMetode penelitan
yang
digunakan
adalah metode perancangandan
implemenrasi,Sistem yang dibangun adalah alat bantu " Sistem Penjejak Posisi Obyik Berbasis pemrosesan
Citra"
Pada perancangan
ini
secara garis besar dikelompokkan dalam dua bagian besar1,-aitu
pertama perancangan
diagram
blok
sistem dan yang
kedua perancangan masing-masingrangkaian sub-sistem
untuk
selanjutnya digabungkanmenjadi
rangkai-anlengkap
,.rru]
diagram blok sistem.
Permasalahan yang akan dibahas dibatasi pada:
a)
Latar belakangplant
dibuat berwarna putih dengan ukuran 60x40 cm2, sedangkan obyek yang diamati berbentuk lingkaran wama hitam, diameter 5 cm.b)
Jarak kamera dariplonl
50 cm, sedangkanj
arak laser polnter keplant
70 cm.c)
Motor
yang
digunakan
untuk
menggerakanobjek yang diamati
dan
untukpergerakan
laser
pointer
adalahjenis motor
stepper dengan pergerakan setiap stepnya 2,5 mm.d)
Putaran gerak per step dari motor stepper diatur oleh mekanik gear.2.1
PemrosesanCitra
Citra adalah representasi dari dua dimensi untuk bentuk
fisik
nyata tiga dimensi. Dalam perwujudannya,citra dibagi menjadi
2
yaitu
citra
diam
(stilt
images)Jan citra
bergerak(moving
images).Citra diam
adalahcitra tunggal
yangtidak
bergerak. Sedangkan-citrabergerak adalah rangkaian
citra
diam yang ditampilkan secara sekuensial sehingga memberi kesan padamatakita
sebagai gambar yang bergerak.Agar citra
yang mengalanii gangguan mudah diinterpretasi baik oleh manusia maupun mesin, maka citra tersebut pJrluaimani[Uasi
menjadi
citra
lain
yang
kualitasnya
lebih
baik
atau disebut
pemrosesancitra
(imageprocessing). Karena pengolahan citra dilakukan dalam komputer digital, maka citra yang akan
diolah terlebih dahulu ditransformasikan kedalam bentuk besaran-besaran
diskrit
iada
titik-titik
elemen citra, dan bentuk dari citraini
disebut citra digital.[4]2.2
KomponenCitra Digital
Setiap citra
digital memiliki
beberapa karakteristik, antaralain
ukurancitra,
resolusi,{an iormlt
nilainya. Umumnyacitra digital
berbentuk persegi panjang yangmemiliki
lebardan
tinggi
tertentu. U-kuranini
biasanya dinyatakan daiam banyaknyatitik
ataupixel
(picture Element), sehingga ukuran citra selalu bernilai bulat.Ukuran citra dapatjuga dinyatakan dalam ukuran
fisik
dalam satuan panjang (misalnyamm
atau inch). Dalamhal
ini
tentu
saja harus ada hubungan antaratitikpenyusunan
citra dengan satuan panjang.Hal
tersebut dinyatakan dengan resolusi yurrg-..upakan
ukuranbanyaknya
titik
untuk setiap satuan panjang. Makin besar resolusinya makin banyaktitik
yang terkandung dalam citra dengan ukuranfisik
yang sama. Halini
memberikan efek penampakan citra menjadi semakin halus.Syahrul, Andi Kurniawan I JSM STMIK
@
voL13,No1,APRIL2o12
Format citra
digital
ada bermacam-macam. Karena sebenamya citra merepresentasikaninformasi
tertentu, sedangkaninformasi
tersebut dapat dinyatakan secara bervariasi, makacitra yang
mewakilinya
dapat muncul dalam berbagai format.Citra
yang merepresentasikaninformasi
hanyabersifat biner untuk
membedakan2
keadaart tertentutidak
sama denganinformasi yang lebih kompleks sehingga memerlukan lebih banyak keadaan yang diwakilinya.
Pada citra
digitat
semua informasi tadi disimpan dalam bentuk angka, sedangkan penampilan angka tersebut biasanya dikaitkan dengan warna.Citra digital
tersusun atastitik-titik
yang
biasanya berbentuk persegi panjang ataubujursangkar
yang
secara beraturan membentukbaris dan kolom.
Setiaptitik
memiliki
koordinat sesuai posisinya dalam
citra. Koordinat
ini
biasanya dinyatakan dalam bilangan bulat positif, yang dapat dimulai dari 0 atau 1 tergantung pada sistem yang digrurakan [4]3.
Hasil
Dan PembahasanPada bagian
ini
dibahas realisasi dan hasil pengujian sistem. Realisasi sistem dilalrukandengan menggabungkan semua sub-modul
hasil
rancanganyang telah
dibahasdi
atas,Pengujian dilakukan berdasarkan prosedur yang sudah baku, misalnya dilakukan pengukuran
atau
uji-coba
terhadapmodul-mudul
yang terpisah (sub-modul).Baru
setelah semuasub-modul
sudah sesuai denganyang
diharapkan maka dilakukanlah interkoneksi antarasub-modul lainnya yang pada akhirnya akan membentuk sistem yang lengkap
3.1
RancanganHardware
SistemPembuatan perangkat mekanik yang
terdiri
dari desainplant itu
sendiri, dudukan objek yang diamati dan digerakan oleh motor secara manual, serta dudukan laserpointer
yang akarrmenjadi
pengikut
bendayang diamati.
Sedangkan pembuatan perangkat keras elektronikterdiri dari
pembuatan rangkaian sistem pengontrolAT89C5I, driver motor
stepper, danrangkaian komunikasi data serial RS232.
Alat
yang
dibangundibagi
menjadi beberapa bagian terpisahyaitu
rangkaian sistempengontrol AT89C51, rangkaian transistor sebagai
driver
motor, rangkaian komunikasi data seriat RS232, danpersonal
computer termasukdi
dalamnya perangkat lunak yang didesainmenggunakan
Delphi.
Kamera webcam berfungsi sebagai sensorvisual untuk
mengambilcitra obyek yang bergerak
di
datamplant,
dan akan mengirimkan data berupa citra ke PC, dimana citra tersebut akan diolah menggunakan program
Delphi.
Selanjutnya data yang sudahdiolah
akan
dikirim
ke
mikrokontroler
menggunakankomunikasi data RS232,
danmikrokontroler akan
memberikanperintah
untuk
menggerakanlaser
pointer yang
akanmengikuti objek yang bergerak di dalamplant.
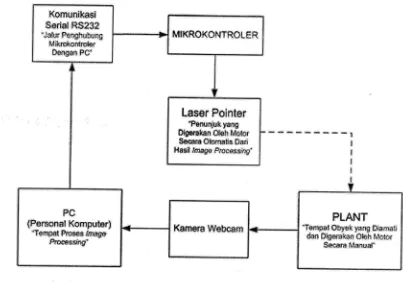
Dari
Gambar1
dapat dijelaskan bahwainformasi yang
berupaobyek
citra
diterimakamera
kemudian informasi tersebut
dikidm
ke
komputer. Setelahinformasi
diterimamaka data informasi yang berupa citra akan dimanipulasi
di
komputer dengan menggunakanprogram pengolahan
citra
(image processing)menjadi
suatudata yang
berupa koordinatsumbu
X
dan sumbuY.
Untuk
proses selanjutnya, data yangtelah
dimanipulasi komputerakan
dikirim ke
mikrokontroller AT89C51
menggunakankomunikasi serial
RS232 untukdiinisialisasi menjadi instruksi
dat4
sebagai instruksi untuk menjalankan motor stepper yang menggerakan laserpointer
pengikut benda. Laserpointer
int bergerak secara otomatis sesuai dengan masukan data yang diterima dari kamera. Pergerakan laserpointer
iru
adalah ke kiri-ke kanan dan kiri-ke bawah-kiri-ke atas.vol,
13, NO 1, APRrL 2012&r1t(RsKst{Tft*tHft
La*ar Poinler
'P*n*4ju* yx*g
0l$6$isan Slslx M*lsr
$Bof,r* Skmsiis *sd
H* ril,ltrrrg* A"*t*rg*,r*'
FC
{Serxomal Kqr*rptn* fosnoat Frro**s l,trqSET
lrr(}*snrr,gl.
PLANT
*Ts**Ss{
Qh'fek y.xng $iarnatri S*n llitrpr*k*n *t*h |llrltsr
[image:4.612.59.462.62.346.2] [image:4.612.55.462.491.742.2].*n*tra ht"ant*al'
Gambar 1. Diagram
Blok
Rancangan SistemA.
RancanganMekanik
Plant
Untuk
bagian rancanganmekanik
padaplant
tempat
di
manaobyek yang
diamati terdapat tiga buahpuli
pada setiap sudutplant,
dimanapuli
tersebut berfungsi sebagaijalur
untuk
benangpenarik obyek.
Gambarplant
untuk
obyekyang diamati
dapatdilihat
padaGambar 2.
Ba*kgr*und F{nnt
Sr*drdr*n P{*nt
tss€r
Pc**s Ge# qrp0l3 {${fi!euY)
C$&rOrrtpul I {3dmbu \4
Gcshrrrl {swtlbuY}
|*dln {sir$rrY)
565.&,dr{ji
{$nerx}
Ports
{swr*xr Y}
[image:5.612.145.528.584.759.2]Po.or {8{n{xi X)
Gambar 3. Mekanik Laser pointer
B. Rancangan
Mekanik
LaserPointer
Pada rancangan mekanik laser
pointer
digunakanmotor
stepper sebagai penggeraknyadan
menggunakansistem
gear
to
gear
untuk
menggerakan
laser
pointer.
Denganmenggunakan
sistem
perbandingaf,Lgedr
pada sistem
ini,
diharapkan pergerakan motor stepper sumbuX
dan sumbuY
perbedaan stepnya tidak terlalujauh.
Gambar dudukan laserpointer dapat dilihat pada Gambar 3.
C. Rancangan
Mekanik
Gear
Pada
rancangan
sistem identifikasi
ini,
mekarrk
gear
dipakai untuk
mengatur pergerakan motor stepper per step nya, perancangan sistem gear to gear yang digunakan pada sistem penggerak laserpointer
dapat dilihat pada Gambar 4.Motor Stepper (sumbu X)
G€ar lnput Gear Output
vol,
13.\-o
1, APRIL 2012Gambar 4. Mekanik Gear Motor Stepper Sumbu
I
G**r Sut$r;t
{
(3ss. {}irrsut J
$e*r *(,{$llt ?
Gsar OrnFxt t
$*r*r lepll
T{*ii t{orer
l-as*r Pornlcr Pr:res Gear l*a$er Porntet
Pott 1.aqg
dgunakan unuk
m.otsr stfpBrr:
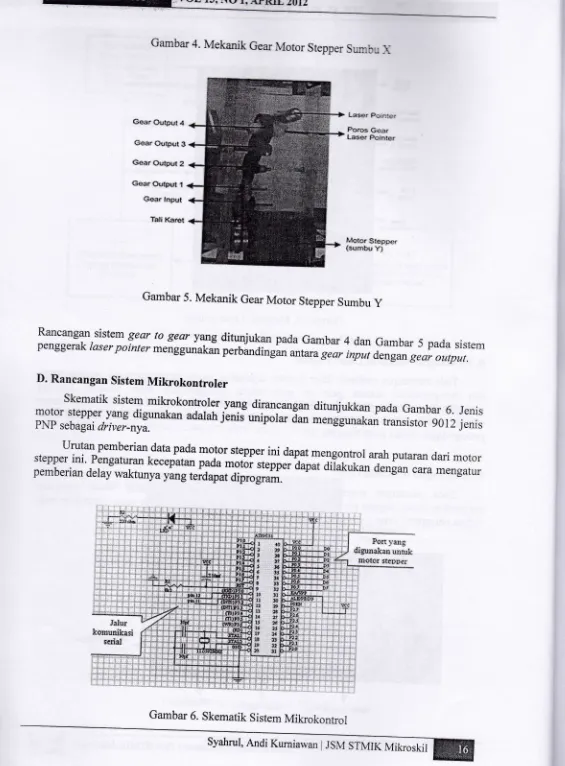
Gambar 5. Mekanik Gear
Motor
Stepper Sumbuy
Rancangan sistem
qeor
togear
yang ditunjukan padaGamb at
4
d,anGambar 5 pada sistem penggerak laser pointeir menggunakinperbanaing;;
*tu*^
gear inputdengan gear output.
D. Rancangan Sistem
Mikrokontroler
Skematik sistem
mikrokontroler
yang dirancangan ditunjukkan pada Gambar6.
Jenis ffif:i...ffi:frl,Tf:;::*o*
adarahjeniJunipohfi;;
il.ngg,nukan
transistor e012 jenisUrutan pemberian data padamotor stepper
ini
dapat mengontrol arah putaran dari motor stepperini'
Pengaturan kecepatan pada m.otoi stepper -d.apatdilakukandengan cara mengatur pemberian delay waktunyu yung terdapat
diprogr#.
-
--r--Gambar 6. Skematik Sistem Mikrokontrol
Syahrul, Andi Kurniawan
[image:6.612.8.573.21.787.2]3.2 Rancangan Software Sistem
Rancangan
software sistem
terdiri
atas
software
bagian mikrokontroler
yangmengendalikan pergerakan
motor
stepper dan software lairurya adalah software yang dibuatpada komputer
untuk
mengolah
dan
memberikan umpanbalik
hasil
citra
ke
sistemmikrokontroler.
Komputer mengirimkan input melalui RS232 ke mikrokontroler, kemudian output dari
mikrokontroler akan mengaktifkan driver motor untuk menggerakan motor stepper. Diagram
[image:7.612.98.567.249.724.2]alir software sistem dapat dilihat pada Gambar 7.
Gambar T,Diagrarn
Alir
Software Sistem Penjejak Bendalnislalissi Alamat Mamory Sumbu X = 2OH Sumbu Y = 40H
Simpan Oata dl
Data 1 = Rl
Oata 2 = R2
Simpan Dats di
Data 1 = R0
Dats 2 = R2
Syahrul, Andi Kurniawan IJSM STMIK Mikroskil
i : ..!
Mi'to"rs;*ot,**oru,
3.3 Pengujian Sistem
Pengujian
dilakukan
pada pergerakan laserpointer yang
digerakkanpada
sejumlahmotor stepper dan waktu yang ditempuh.
A.
PengujianMotor
StepperPutaran
motor
stepper
diatur
sesuai
dengan
input data
yang diberikan
olehmikrokontroler. Urutan pemberian data pada motor stepper
ini
dapat mengontrol arah putaran kekiri
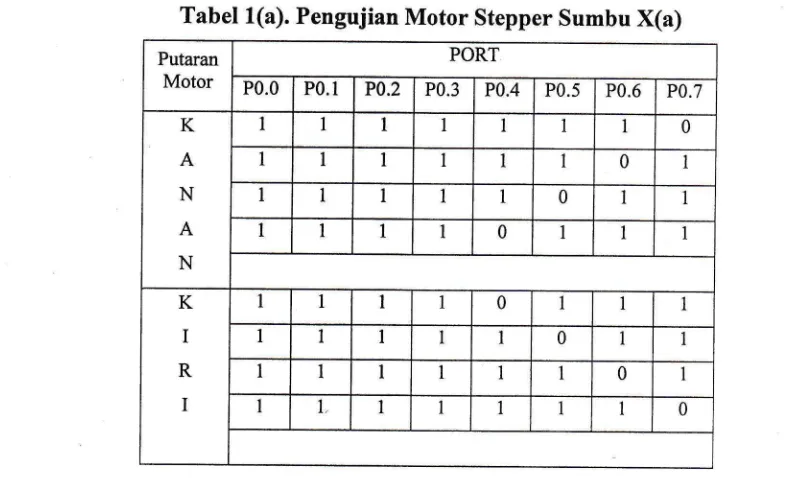
dan ke kanan dengan memberikan data terbalik, urutan data tersebut dapat dilihat pada Tabel 1^Tabel
1(a). PengujianMotor
Stepper SumbuX(a)
Putaran
Motor
PORT
P0.0 P0.l P0.2 P0.3 P0.4 P0.5 P0.6 P0.7
K A
N A N
I I I I 0
I I I I I 0
I I 1 I 0 1 I
I I I 0 1 I
K
I
R
I
I 1 0 I I i
1 I 1 0 I I
I I I 1 I 0 1
I I I I I 0
Pada Tabel 1(a) input data dari mikrokontroler akan menggerakan motor
sumbu
X,
dan port yang digunakan untuk mengendalikan motor stepper sumbu sampai P0.7.Tabel
1(b) PengujianMotor
Stepper SumbuY(b)
Putaran
Motor
PORT
P0.0 P0.l P0.2 P0.3 P0.4 P0.5 P0.6 P0.7
K
A
N A N
I I 0 I I I 1
1 I 0 I I
1 0 I I 1
0 I I I
K I
R
I
I 0 I 1 1
I I 0 I 1 I I
I 0 I I I
I 1 0 I I 1
[image:8.612.55.456.214.453.2] [image:8.612.23.482.512.808.2]Pada Tabel 1(b) input data dari mikrokontroler akan menggerakan motor stepper untuk
sumbu
Y,
dan port yang digunakan untuk mengendalikan motor stepper sumbuY
adalah P0.0 sampai P0.3.B. Pengujian
Waktu
Pergerakan ObyekObyek dalam
plant
bergerak sesuai denganinput
manual daripush
button yang l<rtatekan. Obyek dalam
plant
digerakan oleh dua motor stepper yang menggunakan benang danpuli
sebagaijalur
dan dudukannya. Pada pengujianini,
waktu pergerakan obyektidak
stabil yang disebabkan gesekan mekanik.TabelZ. Waktu Perserakan
0
No Pergerakan
(cm)
Waktu
(detik)
1 I 1,5 6,35
2 8,7 4,42
4,5 2,69
4 6,5 3,53
5 J 1,96
C. Pengujian Pergerakan Laser
Pointer
Pergerakan laser pointer dalam mengikuti obyek diatur dengan menggunakan mekanik
gear,
dalarn pengujianini jarak
dalam ukurancm
didapatkandari
titik
default yang telah ditentukan.ek
Tab
el 3. Pe LaserPointer
Meneikuti
No
Data Dalam Pixel
Pergerakan Dalam cm
Waktu
(detik) Koor
d.x
Koord
.Y
Koord.
x
(cm)
Koord.
Y
(cm)
I 124 191 l6 27 16,19
2 219 182 t2 2t 8,42
J
u4
196 l5 3l 11,444 241 188 l6 25 13,06
5 r6r 193 t2 28 10,02
Qlvek
vol
13,N0
x,APRrL20124. Penutup
Sistem
yang diqncang
memperfihatkal bahwa
program
image processing
dapat memproses citra yang d-itangkap oleh kamera dan dapat
r".ngiri*k
an{atairurit pro..s
untuk
menentukan
koordinat
X
dan koordinatY
ke milaokontrolLr
AT89C51
dan menggerakanmotor stepper untuk mengikuti pergerakan obyek yang diamati.
Pengaturan gerakan
motor
stepper lebilr-teraturi.ng*
bantuan mekanikgear. Mekanik
geqr yarLg digunakan unJuk motor stepperpengikut bendiberbeda
antara sumbu
X
dan sumbuY,
sehingga mengakibatkan pergerakankeduaLotor
tersebut tidaksama.
Referensi
[1]' Achmad, Balp.,-
-Firdausy,
Kartika.,
2005,
Tetrnik pengolahan
citra
Digitat
-
-
Menggunakan Delphi,Andi,
yogyakarta.[2]' Andi.,
2003,
PanduanPrattii
PemrogramanBorland
Detphi 7.01,
edisi1,
Wahana
Komputer, Semarang.
[3]'
MacKenzie,I.
Scott.,
1995, The 8051Mi*aconfioller.
second,edition, prentice-Hall Inc., USA.[4]. Munif, Rinaldi.,
2004, pengolahancitra Digttal
Informatikg
Bandung.[5]' Nalwan, Paulus., 2a03, Panduan
PraktTs Tetmik
Antarmuka
ion
pemrogramanMilrokontr
ol er AT8 gc
s,r, Elex MediaKomputindo, . Jakafia.
[6]'
Tompkins,Willis
J., Vy'ebster,J.,G.
1988,'mrryoci"[
sensorto
theIBM