APLIKASI NERAL NETWORK UNTUK
APLIKASI NERAL NETWORK UNTUK
PARAMETER MEKANIK
PARAMETER MEKANIK
IDENTIFIKASI ASYNCHRONOUS
IDENTIFIKASI ASYNCHRONOUS
MOTOR
MOTOR
D. Balara *, J. TimkoD. Balara *, J. Timko ** , J. Zilková *, , J. Zilková *, M. LešoM. Lešo * * Abstrak: Metode identifikasi parameter mekanis asinkronus-motor disajikan
Abstrak: Metode identifikasi parameter mekanis asinkronus-motor disajikan dalam makalah ini. Metode dalam makalah ini. Metode identifikasiidentifikasi didasarkan pada
didasarkan pada penggunaan pengetahuan kpenggunaan pengetahuan kita tentang ita tentang sistem. sistem. Makalah ini Makalah ini mengklarifikmengklarifikasi asi metode denganmetode dengan menggunakan contoh identifikasi parameter mekanik dari sangkar tupai tiga fasa motor asinkron. Model subsistem menggunakan contoh identifikasi parameter mekanik dari sangkar tupai tiga fasa motor asinkron. Model subsistem mekanik motor disajikan sebagai serta hasil simulasi. Jaringan syaraf khusus digunakan sebagai identifikasi model mekanik motor disajikan sebagai serta hasil simulasi. Jaringan syaraf khusus digunakan sebagai identifikasi model dan adaptasinya didasarkan pada metode keturunan gradien. Parameter Subsistem mekanis berasal dari nilai bobot dan adaptasinya didasarkan pada metode keturunan gradien. Parameter Subsistem mekanis berasal dari nilai bobot sinaptik dari model identifikasi saraf setelah adaptasinya. Penyimpangan mekanik yang teridentifikasi Parameter sinaptik dari model identifikasi saraf setelah adaptasinya. Penyimpangan mekanik yang teridentifikasi Parameter dalam kasus inersia momen sampai 0,03% dan dalam kasus beban
dalam kasus inersia momen sampai 0,03% dan dalam kasus beban torsi adalah 1,45% dari nilai sebenarnya.torsi adalah 1,45% dari nilai sebenarnya. Kata kunci: jaringan syaraf tiruan,
Kata kunci: jaringan syaraf tiruan, identifikasi, penggerak listrikidentifikasi, penggerak listrik Diterima:
Diterima: 14 14 Juni Juni 2016 2016 DOI: DOI: 10.14311 10.14311 / / NNW.2017.27.013NNW.2017.27.013 Direvisi dan diterima: 11 Juni 2017
Direvisi dan diterima: 11 Juni 2017
1. Perkenalan
1. Perkenalan
Untuk memastikan kontrol kualitas yang tinggi
Untuk memastikan kontrol kualitas yang tinggi terhadap sistem dinamis nonlinier, pengetahuan yang tepat terhadap sistem dinamis nonlinier, pengetahuan yang tepat parameterparameter diperlukan Dalam sistem identifikasi banyak pendekatan yang berbeda bias digunakan tergantung pada informasi diperlukan Dalam sistem identifikasi banyak pendekatan yang berbeda bias digunakan tergantung pada informasi sebelumnya yang tersedia. Solusi untuk pertanyaan itu identifikasi parameter sistem dinamis non-linear dan drive sebelumnya yang tersedia. Solusi untuk pertanyaan itu identifikasi parameter sistem dinamis non-linear dan drive listrik Selain itu, penggunaan metode
listrik Selain itu, penggunaan metode identifikasi konvensional memerlukan rumit dan perhitungan memakan waktuidentifikasi konvensional memerlukan rumit dan perhitungan memakan waktu dan mereka bisa mahal untuk melakukan
dan mereka bisa mahal untuk melakukan persiapan sistem untuk pengukuran [persiapan sistem untuk pengukuran [ 1212,,1414]. Apa lagi yang konvensional]. Apa lagi yang konvensional Metode yang digunakan untuk identifikasi parameter sistem didasarkan pada sejumlah asumsi yang tidak valid dalam Metode yang digunakan untuk identifikasi parameter sistem didasarkan pada sejumlah asumsi yang tidak valid dalam semua kondisi operasi. Dalam beberapa tahun terakhir, Penelitian di bidang electrical drive ini juga telah difokuskan semua kondisi operasi. Dalam beberapa tahun terakhir, Penelitian di bidang electrical drive ini juga telah difokuskan pada penerapan
pada penerapan metode yang berbeda metode yang berbeda dari kecerdasan buatan [dari kecerdasan buatan [ 11,, 33-- 77,, 1313,, 1515,, 1717] sebagai teori buatan jaringan] sebagai teori buatan jaringan syaraf tiruan (JST) dan teori himpunan fuzzy atau teori algoritma genetika. Teori himpunan fuzzy paling sering syaraf tiruan (JST) dan teori himpunan fuzzy atau teori algoritma genetika. Teori himpunan fuzzy paling sering digunakan untuk mengendalikan sistem [
digunakan untuk mengendalikan sistem [ 44,,77,,1515] dan Algoritma genetika sering digunakan untuk tugas optimasi] dan Algoritma genetika sering digunakan untuk tugas optimasi [[ 55,, 77] di bidang listrik drive. Jaringan syaraf tiruan (JST) paling sering digunakan untuk pemecahan tugas sebagai:] di bidang listrik drive. Jaringan syaraf tiruan (JST) paling sering digunakan untuk pemecahan tugas sebagai: pendekatan, asosiasi, klas
pendekatan, asosiasi, klasifikasi, kontrol atau prediksi. JST dapat bekerja secara paralel daifikasi, kontrol atau prediksi. JST dapat bekerja secara paralel dan dengan demikian waktun dengan demikian waktu komputasi yang
komputasi yang lebih singkat lebih singkat dapat dicapai. dapat dicapai. Bahkan, mereka Bahkan, mereka dapat digunakan dapat digunakan untuk mengidentifikasi danuntuk mengidentifikasi dan mengendalikan sistem dinamis non linier karena mereka dapat mendekati berbagai fungsi nonlinier sampai tingkat mengendalikan sistem dinamis non linier karena mereka dapat mendekati berbagai fungsi nonlinier sampai tingkat yang diinginkan akurasi [
yang diinginkan akurasi [ 99,, 1010]. ]. Di bidang poDi bidang power drive ANNs wer drive ANNs bisa digunakan untuk electric bisa digunakan untuk electric drive kontroldrive kontrol [[ 44,,77,,1313,,1515], Jumlah estimasi drive listrik [], Jumlah estimasi drive listrik [ 44,,1313,,1515], terutama kecepatan sudut, dan juga untuk identifikasi], terutama kecepatan sudut, dan juga untuk identifikasi parameter dri
parameter drive listrik [ve listrik [ 11,, 1313,, 1717]. Digunakan untuk merancang struktur identifikasi saraf bisa dua berbeda]. Digunakan untuk merancang struktur identifikasi saraf bisa dua berbeda pendekatan:
pendekatan:
• Saat menggunakan jaringan syaraf tiruan
• Saat menggunakan jaringan syaraf tiruan dengan jumlah neuron yang lebih banyak diperkirakan adalah perkiraan dengan jumlah neuron yang lebih banyak diperkirakan adalah perkiraan kuantitas atau parameter, berdasarka
kuantitas atau parameter, berdasarkan sistem yang teruku n sistem yang teruku jumlah [jumlah [ 1313].]. • Struktur syaraf ditentukan dengan menggunak
• Struktur syaraf ditentukan dengan menggunak an analogi struktur a dikenal model matematis sistem, dan denganan analogi struktur a dikenal model matematis sistem, dan dengan demikian parametrik jaringan syaraf tiruan struktur dibuat, sedangkan parameter jaringan yang berisi informasi demikian parametrik jaringan syaraf tiruan struktur dibuat, sedangkan parameter jaringan yang berisi informasi parameter sis
parameter sistem sedang dicatem sedang dicari [ri [ 11].].
Du_san Balara; Jaroslav Timko; Jaroslava Zilkov_a; Martin Le_so { Corresponding author; Du_san Balara; Jaroslav Timko; Jaroslava Zilkov_a; Martin Le_so { Corresponding author; Technical University of Ko_sice, Department of Electrical Engineering and Mechatronics, Letn_a Technical University of Ko_sice, Department of Electrical Engineering and Mechatronics, Letn_a 9, 042 00
9, 042 00 Ko_sice, Slovak Republic, E-mail:Ko_sice, Slovak Republic, E-mail: [email protected]@vadium.sk,, jaroslav.timko@tu [email protected],, jaroslava.zilkova@tuke
Dalam tulisan ini, jaringan syaraf khusus disajikan sebagai model identifikasi dan parameter subsistem mekanik motor asinkron squirrel-cage diidentifikasi dengan menggunakan neuron tunggal dengan aturan adaptasi berdasarkan gradient algoritma keturunan yang banyak digunakan dalam pelatihan jaringan saraf [ 2 ]. Usulan identifikasi Model mengidentifikasi parameter subsistem mekanis dari motor asinkron: momen inersia J, konstan torsi beban pasif m L dan kecuraman karakteristik gesekan linier b. Fluks magnetik [ 1 ] dari asinkron motor seharusnya berasal dari pengamat dan tegangan stator, stator arus dan kecepatan mekanis seharusnya diukur. Usulan identifikasi Model syaraf
tiruan diuji dengan simulasi, termasuk motor yang diidentifikasi.
2. Model motor asinkron
Kami menganggap representasi dua kutub dari squirrel-cage asynchronous motor Model diubah menjadi x, y frame referensi yang berputar dengan kecepatan sinkron diberikan oleh Pers. ( 1 ) - ( 9 ). Transformasi voltase stator tiga fasa ke dalam bingkai referensi α, β stasioner 1 ) Berdasarkan [ 8 ] Ditunjukkan pada Gambar. 1 .
u α1 =1 3 (2u a - u b - u c) dan u β1 = 1√3(u b - u c) (1)
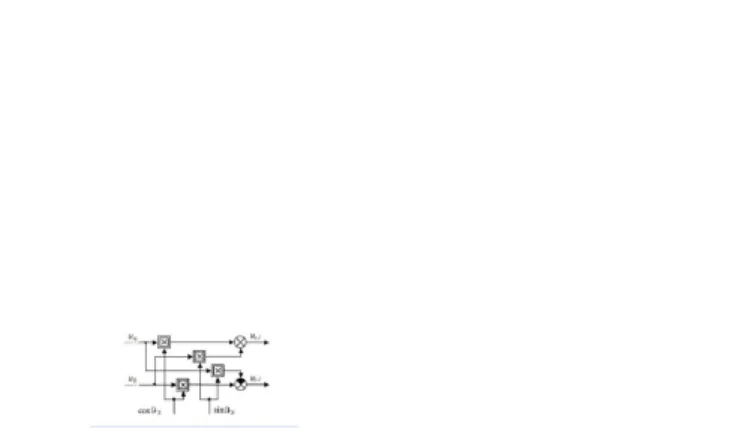
Gambar. 2 menunjukkan transformasi dua-fase stator tegangan referensi stasioner frame α, β menjadi x, frame referensi y yang berputar dengan kecepatan sinkron dengan Persamaan. ( 2 ) [ 8 ]:
u x1 = cos θ S · u a + sin θ S · u ß, (2)
Gambar 1 Transformasi tegangan fasa menjadi α, β kerangka acuan.
Gambar 2 Transformasi tegangan stator ke dalam kerangka acuan x, y.
Dua fase persamaan listrik dari motor asinkron squirrel- cage di α, β kerangka referensi diubah menjadi x, y kerangka acuan yang berputar dengan sinkron kecepatan ditampilkan di Pers. ( 3 ) - ( 9 ) Yang diberikan oleh [ 13 ]:
(4)
(5)
di mana untuk motor asinkron tupai-kandang adalah u x2 = u y2 = 0 dan
(6) i 1, i I2 arus stator dan rotor
u 1, u 2 tegangan stator dan rotor ψ 1, ψ 2 fluks magnet stator dan rotor
p p jumlah pasang pole
ω s kecepatan siku sinkron
ω mech kecepatan sudut mekanis
m, m L, m f motor, beban dan torsi gesekan
L S, L R, L h induktansi kebocoran stator dan rotor, saling induktansi R S, R R Resistansi stator dan rotor
J momen inersia
Tab. 1 Keterangan symbol
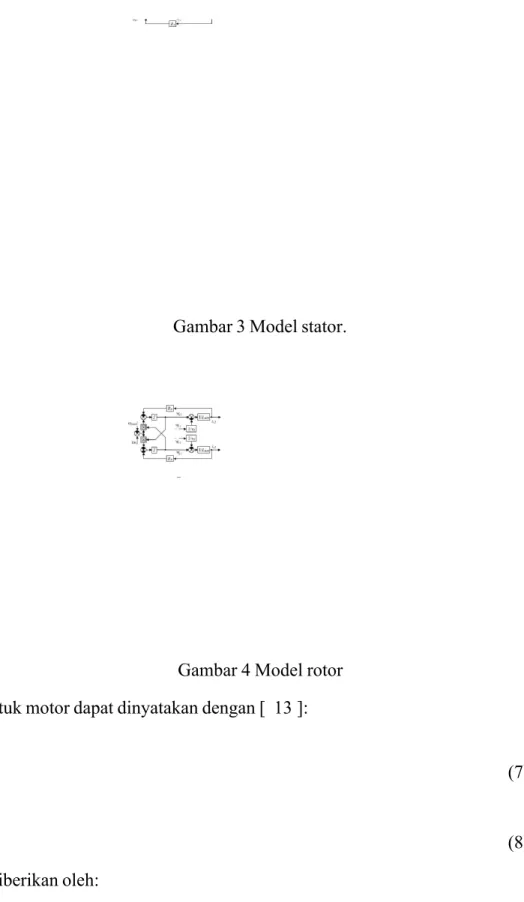
Model diskrit stator dan rotor menurut Persamaan. ( 3 ) - ( 6 ) dengan menggunakan Metode sudut integrasi numerik disajikan oleh model pada Gambar. 3 dan Gambar. 4 .
Gambar 3 Model stator.
Gambar 4 Model rotor Persamaan mekanis untuk motor dapat dinyatakan dengan [ 13 ]:
(7)
(8) dimana torsi gesekan diberikan oleh:
(9)
dimana b menunjukkan kemiringan komponen linear gesekan kental. Konstan pasif beban m L mungkin termasuk Coulomb gesekan. Gambar. 5 menunjukkan model subsistem mechanical oleh Pers. ( 7 ) - ( 9 ), dimana simbol menunjukkan integrator numeric dan model diskrit yang diwakili pada Gambar. 6 .
Gambar 5 Model subsistem mekanik.
Gambar 6 Model diskrit dari subsistem mekanis.
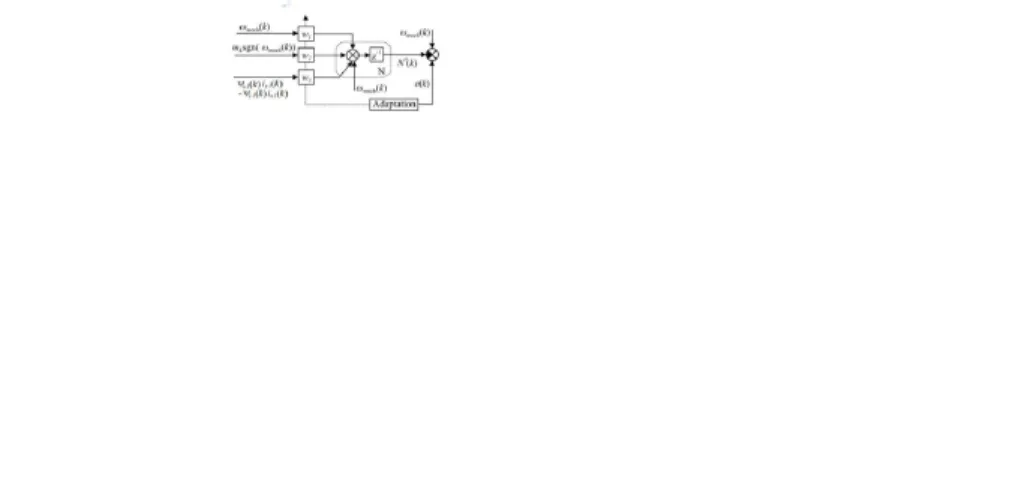
3. Desain Neural Identifier
Struktur identifikasi saraf ditampilkan pada Gambar. 7 yang didasarkan pada kemampuan, yaitu arus stator i1, sudut
kecepatan
ω
mech, dan tegangan statoru
1untuk mendapatkan nilai fluks stator, dapat dianalogikan dengan modeldiskrit subsistem mekanik pada Gambar. 6 .
Output dari model identifikasi saraf (Gbr. 7 ):
(10)
di mana simbol * menunjukkan output dari model identifikasi, mungkin analog untuk ekspresi Pers. ( 8 ):
(11)
Bobot jaringan w 1, w 2 dan w 3 (Fig. 7 ) dipilih sehingga mereka corresponded dengan parameter mekanika motor asinkron Persamaan ( 11 ) seperti di bawah ini:
(12)
Dalam kasus adaptasi ideal dari bobot model identifikasi, kita menemukan nilainya parameter mekanis dari Pers. ( 12 ).
4. Aturan adaptasi
Bila menggunakan arus stator dan fluks magnet stator sebagai input dan mekanik Kecepatan sudut sebagai keluaran yang diinginkan, model identifikasi menyesuaikan bobotnya dengan menggunakan metode keturunan gradien yang terkenal [ 2 ]. Model identifikasi identik dengan subsistem mekanik diwakili oleh neuron linear N pada Gambar. 7 . Saraf output model o = No dibandingkan dengan yang diinginkan diukur sudut nilai kecepatan dan penyimpangan e
berfungsi untuk adaptasi bobot neuron sehingga Model syaraf keluaran disepakati dengan nilai yang diukur dari kecepatan sudut. Misalkan E adalah fungsi biaya:
(13)
Dimana e adalah penyimpangan antara output neuron yang diinginkan dan aktual. Menurut Algoritma gradient descent perubahan setiap bobot harus dilakukan arah yang berlawanan dengan komponen gradien E:
(14) di manain adalah n-th masukan dari neuron dan
η
cn adalah tingkat belajar. Dari Pers. ( 14 ) berikut:(15)
di mana η n = η cn · AT. Aturan adaptasi harus dimodifikasi untuk diperhitungkan anggota waktu tunda: (16)
Setelah diadaptasi, saat perilaku model hampir identik dengan Perilaku motor, parameter yang teridentifikasi dapat diturunkan dari yang khusus bobot neuron N dengan penggunaan Persamaan ( 11 ). Kami memperoleh parameter J dari berat w 1, b dari w 2 dan m L dari berat w 3.
5. Identifikasi parameter
Parameter motor asinkron squirrel-cage yang digunakan dalam simulasi adalah: m L = 5nm, b = 0,01 Nms, U = 190 V, f = 50 Hz, R S = 0,181 Ω, R R = 0,161 Ω, J = 0,11 kgm 2, p p = 2, L S = 0,06583 H, L R = 0,06583 H, L h = 0,064 H.
Tahap tegangan stator u a, u b dan u c memiliki bentuk periodik gelombang 6 langkah dengan amplitudo 190 V (Gbr. 8 ).
Gambar8. Tegangan Tahap u dan representasi dua kutub tegangan berubah menjadi sumbu xy.
Kecepatan motor terbalik setiap 75 periode (Gbr. 9 , Gambar. 11 ) dari stator fase tegangan untuk memberikan sinyal pelatihan yang lebih kaya untuk identifier, yaitu terutama penting untuk identifikasi beban torsi m L. Nilai awal dari
semua bobot dari model neuron sama dengan nol. Nilai belajar tidak dipilih sama dalam proses adaptasi: η 1 = 0.000001, η 2 = 0,00000001, η 3 = 0,00001.
Gambar 9 Program torsi dan kecepatan mekanik motor.
Meskipun output N o dari model identifikasi berkumpul sangat cepat untuk sinyal yang diperlukan (Gambar. 10 ), konvergensi nilai bobot individu yang ditunjukkan pada Gambar. 11 , jauh lebih lambat.
Gambar 10 Deviasi antara kecepatan mekanis motor dan output dari model identifikasi
Gambar 11 Adaptasi bobot dan kecepatan referensi mekanis dari motor.
Perbedaan antara nilai sebenarnya dari bobot tertentu dan identifikasi mereka nilai selama proses adaptasi ditunjukkan pada Gambar. 12 .
Gambar 12 Penyimpangan antara nilai target dan nilai sebenarnya dari bobot.
Tab. II menunjukkan perbandingan parameter yang berasal dari nilai-nilai bobot model identifikasi setelah 13 pengulangan dari training set (Gambar. 11 ) menurut Pers. ( 12 ) dan nilai sebenarnya mereka.
Parameter Nilai Teridentifikasi Nilai Rata - rata Derivation
J 0,10997 kgm2 0,11 kgm2 0,0273%
B 0,01080 Nms 0,01 Nms 8,0%
m L 4.9277 Nm 5 Nm 1,446%
Tab. II Mengidentifikasi parameter mekanik motor.
Mengabaikan komponen eksponensial dari gesekan dapat menyebabkan masalah penyimpangan yang lebih tinggi dari kecuraman karakteristik gesekan yang teridentifikasi b. Deviasi beban diidentifikasi dan nyata torsi m L disebabkan oleh sinyal input untuknya diidentifikasi, yang merupakan tanda kecepatan putar motor. Sinyal ini sering berubah dibandingkan dengan sinyal input lainnya, oleh karena itu hanya ada sedikit informasi untuk identifikasi parameter.
6. Kesimpulan
Dalam tulisan ini metode identifikasi neural sistem dinamis nonlinier adalah disarankan Metode identifikasi yang diusulkan didasarkan pada penggunaan pengetahuan kita dari sistem yang teridentifikasi. Struktur adaptif saraf yang sangat sederhana, analog dengan Model sistem digunakan sebagai neural identifier. Dalam model identifikasi Sinyal pengukuran sederhana dari sistem digunakan sebagai masukan pada model. Parameter dari sistem itu berasal dari nilai bobot sinaptik model saraf setelah adaptasinya. Algoritma gradient descent digunakan untuk adaptasi parameter jaringan syaraf tiruan. Metode identifikasi digunakan sebagai contoh jaringan syaraf tiruan applikasi untuk motor asinkron squirrel-cage. Tujuan kami adalah untuk mengidentifikasi mekanik parameter motor asinkron seperti momen inersia J, pasif konstan saat beban m L dan kecuraman karakteristik gesekan linear b. Identifikasi Metode simulasi komputer sepenuhnya, termasuk motor yang teridentifikasi. Itu Nilai parameter parameter yang teridentifikasi sangat mendekati nilai sebenarnya nilai.
Metode identifikasi harus berhasil diterapkan untuk mengidentifikasi parameter-paraneter dari banyak sistem dinamis nonlinier lainnya, terutama jika kita mengenalnya struktur.
Pengakuan
Penulis mengucapkan terima kasih kepada proyek VEGA 1/0464/15 atas dukungannya.
Referensi
[1] BALARA D., TIMKO J., ZILKOVÁ J. Penerapan model jaringan syaraf tiruan untuk parameter identifikasi sistem dinamis non linier. Dunia Jaringan Syaraf Tiruan. 2013, 23 (2) hal. 103-116, doi: 10,14311 / NNW.2013.23.008 . [2] BALDI P: Algoritma Algoritma Gradient Descent Ikhtisar: Suatu sistem dinamik yang umum perspektif. IEEE Transaksi pada Neural Networks .. 1995, 6 (1) pp 182-195, doi:. 10,1109 / 72.363438 .
[3] BORBEL M., TIMKO J., ZILKOVÁ J. Estimasi kecepatan syaraf untuk motor induksi mendorong. Electrotechnica et Informatica. 2002, 2 (4) hal. 27-30.
[4] BOSE BK Sistem pakar, logika fuzzy, dan aplikasi jaringan syaraf tiruan pada elektronika daya dan kontrol gerak. Prosiding IEEE. 1994, 82 (8) pp 1303-1323, doi:. 10,1109 / 5. 301690 .
[5] BRANDŠTETTER P., DOBROVSK Ý M., KUCHAR M. Implementasi Algorithm dalam Struktur Kontrol Induksi Motor AC Drive. Uang muka listrik dan Teknik Komputer. . 2014, 14 (4) pp 15-20, doi: 10,4316 / AECE.2014.04003 . [6] BRANDŠTETTER P., KUCHAR M., NEBORÁK I. Aplikasi tiruan saraf tiruan jaringan di kontrol motor induksi AC motor. Tinjauan Internasional tentang Pemodelan dan Simulasi. 2011, 4 (3) hal. 1084-1093.
[7] KAZMIERKOWSKI MP, MALESANI L. Teknik kontrol saat ini untuk tiga fase konverter PWM sumber tegangan: sebuah survei. Transaksi IEEE pada Elektronika Industri. 1998, . 45 (5) pp 691-703, doi: 10,1109 / 41,720325 .