2.1 Teknologi Robotika
Robotika adalah teknologi yang berhubungan dengan desain, konstruksi, operasi, disposisi structural, pembuatan, dan aplikasi dari robot itu sendiri. Robotika terkait dengan ilmu pengetauhan bidang elektronika, mesin, mekanika, dan perangkat lunak pada computer.
Pada perkembangan robot saat ini sangat berkaitan erat dengan adanya kebutuhan dalam dunia indrustri modern yang menuntut adanya suatu alat dengan kemampuan yang tinggi serta dapat membantu menyelsaikan perkerjaan manusia ataupun untuk menyelsaikan perkerjaaan yang tidak mampu diselsaikan oleh manusia. Robotik terdiri dari beberapa jenis sebagai berikut :
2.1.1 Robot Mobile
Robot Mobil atau Mobile Robot adalah konstruksi robot yang ciri khasnya adalah memiliki actuator berupa roda untuk menggerakan keseluruhan badan robot tersebut sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik lain.
2.1.2 Robot Jaringan
Robot jaringan adalah pendekatan baru untuk melakukan control robot yang menggunakan jaringan internet dengan protocol IP. Perkembangan robot jaringan dipico oleh kemajuan teknologi baik dari jaringan maupun internet. Dengan koneksi jaringan. Proses kontrol dan monitoring dapat dilakukan mealui pengecekan data dalam jaringan. Keuntungan lain adalah koneksi ini bisa dilakukan dengan pengendalian dari robot perangkat keras yang terhubung dengan internet.
Gambar 2.2 Contoh Robot Jaringan 2.1.3 Robot Manipulator
Robot Manipulator adalah robot yang memilikisatu tangan sperti tangan manusia yang fungsinya untuk memegang atau memindahkan barang. Robot ini banyak digunakan dibidang indrustri untuk merakit elektronik dan lain – lain.
2.1.4 Robot Humanoid
Robot humanoid adalah robot yang penampilan keseluruhannya dibentuk berdasarkan tubuh manusia. Mampu melakukan interaksi dengan peralatan maupun lingkungan yang dibuat untuk manusia. Secara umum robot humanoid memiliki tubuh dengan kepala. Dua buah lengan dan dua kaki. Meskipun ada pula beberapa bentuk robot humanoid yang berupa sebagian dari tubuh manusia.Misalnya dari pinggang ke kepala. Beberapa robot humanoid juga memiliki wajah, lengkap dengan mata dan mulut sehingga menyerupai manusia.
Gambar 2.4 Contoh dari Robot Humanoid 2.1.5 Robot Berkaki
Robot Berkaki adalah robot yang memiliki kaki seperti hewan atau manusia, yang mampu melangkahkan kakinya seperti robot serangga ataupun kepiting.
2.1.6 Flying Robot
Flying Robot adalah robot yang mampu terbang, robot ini menyerupai pesawat model yang diprogram khusus untuk memonitor keadaan di tanah dari atas, dan juga untuk meneruskan komunikasi.
Gambar 2.6 Contoh dari Flying Robot 2.1.7 Underwater Robot
Underwater Robot adalah robot yang digunakan di bawah laut untuk memonitor kondisi bawah laut dan juga mengambil sesuati di bawah laut, yang biasanya digunakan untuk penelitian di dalam air atau di bawah laut.
2.2 Ilmu Pembentuk Robotika
Robot merupakan salah satu produk Mekatronika yang berkembang sangat pesat, dimana pada dasarnya merupakan gabungan dari beberapa teknologi, terutama :
2.2.1 Teknologi Elektronika
Ilmu yang mempelajari alat listrik arus lemah yang dioperasikan dengan cara mengontrol aliran elektron atau partikel bermuatan listrik dalam suatu alat. 2.2.2 Teknologi Perangkat Lunak
Data elektronik yang di simpan oleh suatu perangkat yang dapat berupa sebuah program ataupun instruksi yang akan menjalankan perintah.
2.2.3 Teknologi Mekanik
Ilmu pengetahuan yang mempelajari tentang proses pengerjaan suatu benda atau material, sehingga diperoleh hasil yang sesuai dengan desain yang telah ditentukan.
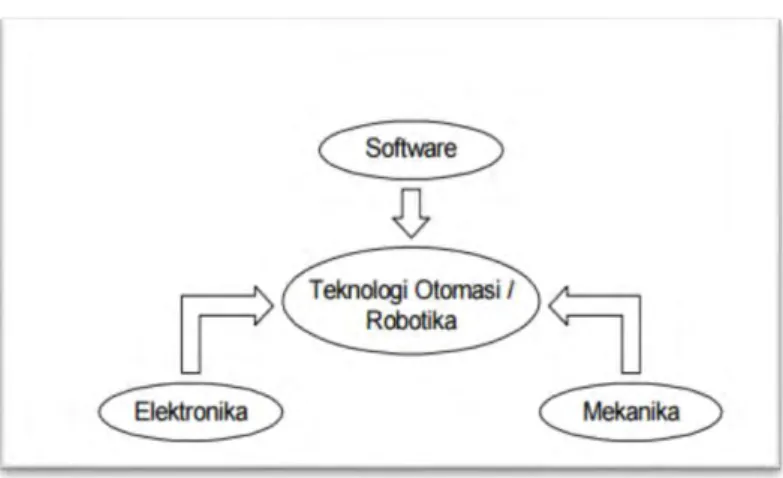
Mengingat sebagian besar dari robot yang ada saat ini adalah robot yang intelligent, maka dapat dikatakan bahwa robot merupakan salah satu produk dari teknologi otomasi seperti diperlihatkan oleh gambar 2.8.
.
2.3 Perangkat Output
Perangkat yang dikendali oleh sebuah controller adalah perangkat output yang berguna untuk mengoperasikan perangkat ini dan dapat dilakukan tanpa menunggu perintah masukan dan luar controller. Dalam arti lain perangat output ini dapat dioperasikan kapan saja sesuai keinginan dari perancangnya, berikut adalah perangkat yang digunakan dalam pembuatan Robot Pembersih Debu :
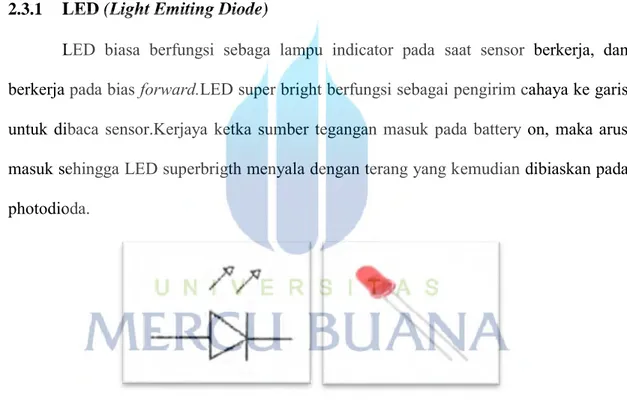
2.3.1 LED (Light Emiting Diode)
LED biasa berfungsi sebaga lampu indicator pada saat sensor berkerja, dan berkerja pada bias forward.LED super bright berfungsi sebagai pengirim cahaya ke garis untuk dibaca sensor.Kerjaya ketka sumber tegangan masuk pada battery on, maka arus masuk sehingga LED superbrigth menyala dengan terang yang kemudian dibiaskan pada photodioda.
Gambar 2.9 Fisik dan Simbol LED 2.3.2 LCD (Liquid Crystal Display)
LCD adalah suatu display dari bahan cairan kristal yang pengoperasioannya menggunakan sistem dot matriks. LCD banyak digunakan sebagai display dari alat – alat elektronika seperti kalkulator, multitester digital, jam digital dan sebagaiannya, LCD dapat dengan mudahdihubungkan dengan mikrokontroler AVR ATmega 16.
LCD yang digunakan dalam percobaan adalah LCD 2x16, lebar display 2 baris 16 kolom, yang mempunyai 16 pin konektor.
Gambar 2.10 Bentuk Fisik dari LCD 2 x 16 2.3.3 Baterai Sekunder Rechargeable
Baterai Sekunder adalah adalah jenis baterai yang dapat di isi ulang atau rechargeable battery pada prinsipnya, baterai ini memiliki kemampuan beroperasi dalam jangkauan suhu yang luas dan siklus daya tahan yang lama.
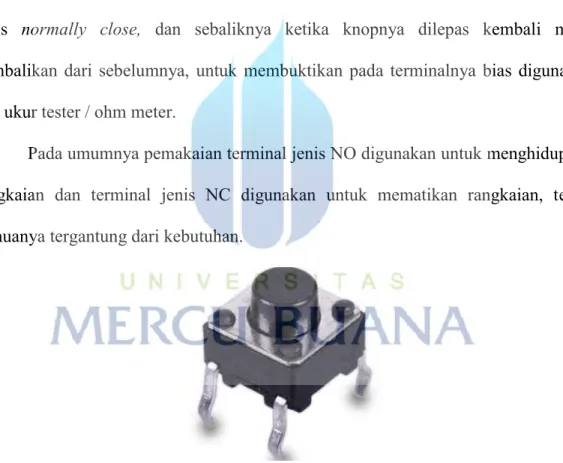
Gambar 2.11 Bentuk Fisik dari Baterai Sekunder 2.3.4 Push Buttom
Komponen ini merupakan komponen yang paling mudah untuk dipelajari dan dipahami karena fungsi dan cara kerjanya sangat sederhana. Komponen ini berkerja dengan cara ditekan.
Pada bagian atasnya terdapat knop yang berfungsi sebagai area penekan, lalu disamping kiri dan kanan terdapat terminal kontak normally open (NO) dan normally close (NC) berfungsi sebagai terminal wiring untuk menghubungkan dengan alat listrik lainnya, lalu mempunyai kapasitas beban sekitar 5A.
Alat ini berfungsi sebagai pemberi sinyal masukan pada rangkaian listrik, ketika dan selama bagian knopnya ditekan maka alat ini akan berkerja sehingga kontak-kontaknya akan terhubung untuk jenis normally open dan akan terlepas untuk jenis normally close, dan sebaliknya ketika knopnya dilepas kembali maka kembalikan dari sebelumnya, untuk membuktikan pada terminalnya bias digunakan alat ukur tester / ohm meter.
Pada umumnya pemakaian terminal jenis NO digunakan untuk menghidupkan rangkaian dan terminal jenis NC digunakan untuk mematikan rangkaian, tetapi semuanya tergantung dari kebutuhan.
Gambar 2.12 Bentuk Fisik Push Button 2.3.5 Motor DC (Direct Current)
Motor DC (Direc Current) adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energy gerak
mekanik. Kumparan medan pada motor disebut stator (bagian yang tidak berputar) dan kumparan jankar disebut rotor (bagian yang berputar). Motor arus searah sebagaimana namanya menggunakan arus langsung dan tidak langsung / direc-undirectional.
Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus seharah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bias berputar bebas di antara kutub-kutub magent permanent.
Catu tegangan DC dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator dan dua segmen yang terhubung dengan dua ujung lilitan.Kumparan satu lilitan pada gambar diatas disebut angker dynamo. Angker dynamo adalah sebutan untuk komponen yang berputar diantara medan magnet.
Prinsip kerja dari Motor DC (Direc Current) yakini gaya elektro magnet pada motor DC(Direc Current) timbul pada saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh magnet permanent yang terdapat pada motor. Garis – garis gaya magnetmengalir diantar dua kutub magnet dari kutub utara dan kutub selatan. Menurut hokum gaya laurentz, arus yang mengalir ada penghantar yang terletak dalam medan magnet akan
menimbulkan gaya. Gaya F akan timbul tergantung pada arus I dan arah medan magnet B.
Gambar 2.13 Bentuk Fisik Motor DC 2.4 Perangkat Controller
Perangkat controller adalah sebuah alat elektronik yang dapat mengerjakan pemikiran sesuai dengan kemauan perancangnya. Pada perangkat inilah keinginan perancang ditanam dimana dengan menggunakan perangkat ini maka sebuah piranti dapat beroprasi secara otomatis.
2.4.1 Mikrokontroller
Mikrokontroler atau pengendali mikro adalah sbuah computer kecil (special purpose computer) di dalam sebuah IC/Chips. Dalam sebuah IC /Chips mikrokontroler terdapat CPU, memori, timer, saluran komunikasi serial dan paralel, port input ataupun output, dan lain lain. Mikrokontroler digunakan sengagai pengendali yang mengatur semua proses.
Mikrokontroler adalah komponen yang sangat umum dalam system elektronik modern. Penggunaannya sangat luas, dalam kehidupan kita sehari – hari baik dirumah, kantor, rumah sakit, sekolah, bank, industry dan lain lain. Mikrokontroler digunakan dalam sejumlah besar system elektronik seperti : system manajemen mesin
mobil, keyboard computer, alat ukur elektronik (multimeter digital, synthesizer frekuensi, dan osiloskop)televise, radio, telepon digital, mobile phone, microwave oven, printer, scanner, kulkas, pendingin ruangan, CD/DVD player, kamera, mesin cuci, PLC (Programmabel Logic Controller), robot, system otomasi, system akusisi data, system keamanan, system EDC (Elektronic Data Capture), mesin ATM, modem, router dan lain – lain.
Mikrokontroller dapat kita gunakan untuk berbagi aplikasi misalnya untuk pengendalian, otomatis indrustri, akusisi data, telekomunikasi dan lain – lain. Keuntungan menggunakan mikrokontroler yaitu selain harganya murah, dapat diprogram berulang kali, dan dapat kita program sesuai keinginan kita. Saat ini keluarga mikrokontroler yang ada dipasaran yaitu intel 8048 dan 8051 (MCS51), Motorola 68HC11, Microchips PIC, Hitachi H8 dan Atmel AVR.
2.4.2 Fitur ATMega 16
Fitur- Fitur yang dimili ATMEGA 16 sebagai berikut :
1 Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi dengan daya rendah.
2 Arsitektur RISC dengan throughput tmencapai 16 MIPS pada frekuensi 16 MHZ.
3 Memiliki kapasitas Flash memori 16 Kbyte, EEPROM 512 Byte dan SRAM 1 Kbyte.
4 Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D. 5 CPU yang terdiri atas 32 buah register.
6 Unit interupsi internal dan eksternal. 7 Fitur Perioheral.
8 Port USART untuk komunikasi Seral. 2.5 Perangkat Input
Perangkat input adalah untuk menjadikan piranti dapat beroperasi dan berfungsi secara otomatis maka perlu adanya masukan yang dapat diolah oleh mikrokontroler yang kemudian dijadikan perintah untuk melakukan sebuah perkerjaan tertentu. Masukan inilah yang dimaksud sebagai input dan input – input ini berasal dari perangkat atau sensor. Banyak jenis masukan yang sering dijumpai pada perangkat mekatronika maupun robot yang memang digunakan untuk member batasan tertentu. Berikut adalah jenis jenis perangkat input yang digunakan dalam pernacangan Robot Pembersih Otomatis :
2.5.1 Driver Motor DC IC L293D
L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan dirver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver Motor DC yang berdiri sendiri dengan kemampuan mengalirkan 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-Bridge untuk 2 buah motor DC intruksi pin diver motor DC IC L293D adalah sebagai berikut.
Gambar 2.15 Konstruksi Pin Driver Motor DC IC L293D Fungsi dari Pin Driver Motor DC IC L293D adalah :
Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC.
Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
2.5.2 Sensor Infra Red
Infra Red Sensor (IR Sensor) dapat digunakan untuk berbagai keperluan misalnya sebagai sensor pada robot, pembuatan IR Sensor dapat digunakan photodioda. Jumlah arus berubah sesuai dengan perubahan intensitas cahaya. Hal ini dideteksi dengan atau sebagai perubahan perubahan tegangan pada eksternal resistor.
2.5.3 Photodioda
Suatu alat dioda yang resistansinya berubah- ubah kalau cahayanya yang jatuh pada dioda maka berubah intensitasnya.Dalam gelap nilai tahannya sangat besar hingga praktis tidak ada arus yang mengalir.Semakin kuat cahaya yang jatuh pada diode maka semakin kecil nilai tahannya sehngga arus yang mengalir semakin besar. 2.5.4 Downloader
Downloader adalah sebuah alat yang digunakan untuk memasukkan program kedalam mikrokontroler, baik data yang berjenis MCS ataupun AVR semuanya butuh downloader, sehingga posisi downloader sangatlah penting untuk dipahami.
Downloader bisa juga diartikan sebagai jembatan penghubung antara computer dengan mikrokontroler yang mana file.hex yang telah dibuat dari compile file.bas dari software BASCOM-AVR dimasukan ke dalam mikrokontroler.