Nama : Isrodiman saputra (141420126)
: Muhamad firdaus (141420275)
: Mita Anjani (13142023)
Dosen : Chairunmukmin, M.Kom
Kerangka Automata Selular untuk
Mempelajari Model Arus Lalu
Kerangka Automata Selular
untuk Mempelajari Model
Arus Lalu Lintas
• Karena terjadi perubahan dalam teknologi kendaraan, yakni baru macam dari otomatis atau semi-otomatis kendaraan yang sedang dikembangkan, dan driver mengubah perilaku dari waktu ke waktu, yang simulasi peraturan lalu lintas untuk aliran terakhir Mei harus disesuaikan. Penampungan fitur tersebut akan memfasilitasi eksplorasi arus lalu lintas di dasar lokal, di mana satu-lane model mungkin tidak cukup akurat.
• Kendala utama yang dihadapi dalam upaya kami sejauh ini telah yang validasi dari hasil disebabkan oleh kurangnya referensi empiris dan hasil yang rumit dan model. Hal ini bukan untuk kasus sederhana, satu jalur model, dimana validasi bukan masalah, karena banyak bekerja dapat ditemukan di literatur. Dengan demikian, iamemutuskan untuk pelaksana model dalam sistem yang diusulkan untuk mengakomodasi validasi. Langkah pertama ini dianggap berhasil sejak simulasi hasil approximated hasil empiris, yang didirikan kelayakan alat, sebagai berikut dibahas dalam bagian. Meskipun telah diusulkan alat kemampuan untuk menampung kompleks model, validasi belum dilakukan, karena adanya kekurangan dari hasil empiris. Kami sedang bekerja menuju arah ini, mengumpulkan hasil empiris untuk mandiri dalam kota, sedangkan eksploitasi alternatif simulasi menggambarkan diterjemahkan perilaku berkendara di kota Athens, adalah dekat tujuan dari upaya ini. Namun, penyediaan parametrical lingkungan yang disajikan dalam berikut, yang mampu mewujudkan fitur di atas, adalah penting untuk efisien eksploitasi alternatif lalu lintas model skenario.
Model Selular Automata
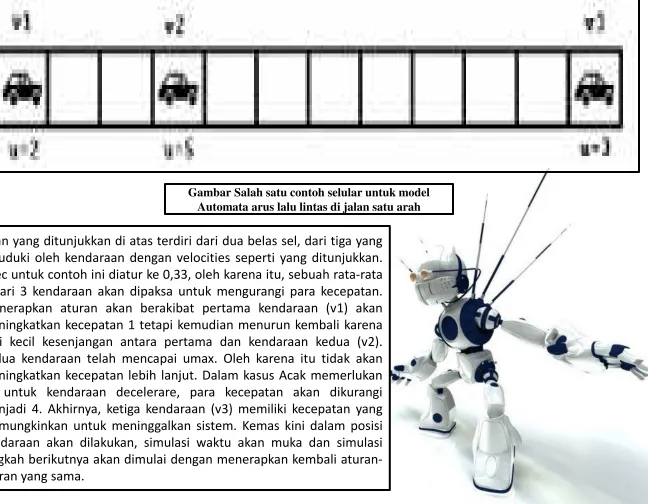
Pendekatan yang diajukan berdasarkan model selular automaton untuk lalu lintas jalan bebas hambatan yang diusulkan oleh Nagel Kai dan Michael Schreckenberg. Model didefinisikan oleh vector yang terdiri dari situs, juga dikenal sebagai sel. Setiap sel tersebut biasanya ditetapkan hingga 7,5 m. Setiap sel bisa kosong, atau diduduki oleh kendaraan. Dalam model asli, semua kendaraan adalah ukuran yang sama dan telah bulat velocities antara nol dan umax. Yang merupakan parameter dari model. .Biasanya, realistis untuk nilai umax adalah 5. Update dari posisi kendaraan melibatkan tiga peraturan, yang, di setiap waktu langkah, menentukan kecepatan kendaraan. Peraturan tersebut adalah berikut:
• Acak: Dengan kemungkinan pdec, dengan kecepatan kendaraan sudah berkurang 1. Peraturan di atas dijalankan dan kecepatan dihitung untuk setiap kendaraan hadir dalam sistem. Eventually, the Pada akhirnya, yang posisi setiap kendaraan sudah diperbarui ini menurut kecepatan. Agar hasil untuk mengacu ke kehidupan nyata-pengukuran, setiap kali langkah dianggap 1 detik..
Jalan yang ditunjukkan di atas terdiri dari dua belas sel, dari tiga yang diduduki oleh kendaraan dengan velocities seperti yang ditunjukkan. Pdec untuk contoh ini diatur ke 0,33, oleh karena itu, sebuah rata-rata 1 dari 3 kendaraan akan dipaksa untuk mengurangi para kecepatan. Menerapkan aturan akan berakibat pertama kendaraan (v1) akan meningkatkan kecepatan 1 tetapi kemudian menurun kembali karena dari kecil kesenjangan antara pertama dan kendaraan kedua (v2). Kedua kendaraan telah mencapai umax. Oleh karena itu tidak akan meningkatkan kecepatan lebih lanjut. Dalam kasus Acak memerlukan ini untuk kendaraan decelerare, para kecepatan akan dikurangi menjadi 4. Akhirnya, ketiga kendaraan (v3) memiliki kecepatan yang memungkinkan untuk meninggalkan sistem. Kemas kini dalam posisi kendaraan akan dilakukan, simulasi waktu akan muka dan simulasi langkah berikutnya akan dimulai dengan menerapkan kembali aturan-aturan yang sama.
Langkah-langkah yang paling penting dalam model ini adalah lalu lintas dan kepadatan arus lalu lintas, yang, pada satu jalur, yang dari data pengukuran lokal. Arus lalu lintas didefinisikan sebagai jumlah kendaraan per unit dan waktu adalah dihitung sebagai berikut:
Rata-rata kepadatan lalu lintas didefinisikan sebagai jumlah kendaraan per unit panjang dan dapat dihitung dari arus lalu lintas dan kecepatan rata-rata:
Rata-rata kepadatan lalu lintas didefinisikan sebagai jumlah kendaraan per unit panjang
dan dapat dihitung dari arus lalu lintas dan kecepatan rata-rata:
Pendekatan
Δxj
≈
Δt
⋅
vj (x, t) ini hanya berlaku
jika semua terdeteksi kendaraan bergerak
dengan kecepatan yang sama kira-kira selama
interval waktu
Δt
.
Pendekatan
Δxj
≈
Δt
⋅
vj (x, t) ini hanya berlaku jika
semua terdeteksi kendaraan bergerak dengan
kecepatan yang sama kira-kira selama interval
Kerangka dan Pelaksanaan
Usulan kerangka adalah suatu lingkungan bertujuan pada peningkatan expandability dan parameterization dari model jaringan jalan dan manipulasi alternatif simulasi aturan. Arsitektur adalah modular, dalam rangka untuk bagian yang berbeda untuk mandiri dari satu sama lain dan mudah.
Gambar Usulan kerangka arsitektur
Kerangka ini memfasilitasi:
• Parametris, jaringan jalan model.
• Mudah modifikasi dan perluasan yang sudah ada jalan
jaringan model.
• Adaptif aturan yang dapat dengan mudah dapat
diubah.
• Parametris simulasi.
• Visualisasi dari hasil simulasi dalam grafik dan
•
Usulan metodologi yang akan disajikan dalam
bagian ini yaitu hasil pembangunan yang terpadu
modular sistem untuk model dari arbitrary
jaringan jalan, dilaksanakan di MATLAB.
•
Konseptual model jaringan jalan, yang dirancang
sebagai diusulkan dalam sistem, terdiri dari jalan
dan pertemuan. Setiap jalan dibagi menjadi biji
dan bagian, dan setiap bagian menjadi pertemuan
mungkin sederhana, dalam kasus yang biasa lalu
lintas, undang-undang menunjukkan prioritas
kendaraan, atau mungkin lampu lalu lintas, dalam
kasus yang mereka indikasi yang diperhitungkan.
Selain itu, sistem telah masuk dan keluar poin,
dimana kendaraan yang masuk dan keluar dari
sistem dan statistik yang dikumpulkan. Sejauh
properti di jalan raya adalah bagian bersangkutan,
masing-masing bagian memiliki kapasitas yang
telah ditetapkan, yang menunjukkan jumlah sel,
dan faktor perlambatan, yang menunjukkan
seberapa sering kendaraan lambat di bawah ini
bagian dari jalan dalam cara probabilistic.
• Setiap kendaraan yang diwakili sebagai terpisah entitas yang memiliki parameter, seperti kecepatan. Parameter-parameter digunakan dalam kombinasi dengan simulasi dan peraturan lainnya keselamatan parameter sistem, untuk menghasilkan update posisi kendaraan. Kendaraan yang terpasang dalam sistem di entry point, menurut yang telah ditetapkan menilai kedatangan diberikan oleh pengguna di muka sebagai parameter dari setiap titik awal. Saat mereka dalam sistem, mereka dapat mendiami tepat satu sel pada suatu waktu, karena mereka semua dianggap ukuran yang sama. Akhirnya, mereka meninggalkan keluar di sistem poin, yang mempengaruhi statistik yang sesuai measures. tindakan.
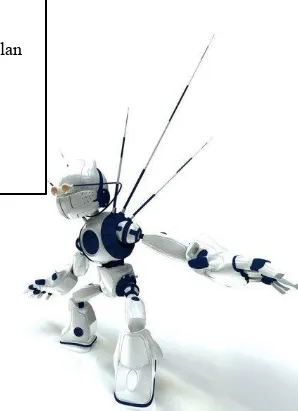
Gambar Contoh jalan masuk dan keluar dengan poin di
tandai
Sebuah contoh sebagian demostrating masuknya informasi untuk pertama bagian dari Road 1 untuk MATLAB berikut
•
Informasi yang diberikan ke sistem termasuk
interarrival waktu untuk bagian ini, karena
merupakan titik awal untuk sistem, kapasitas jalan
bagian, dengan pelaksanaannya, para tetangga, jika
ada, dan pada pertemuan awal dan akhir bagian
jalan. Prosedur yang sama telah akan diikuti sekali
untuk setiap bagian dalam sistem. Kemudian, ia
disimpan dan dapat diubah di lain waktu,
digunakan untuk menjalankan simulasi lalu lintas
dengan simulasi aturan yang dicantumkan dalam
sistem, atau digunakan dengan berbagai set aturan
simulasi. Perlu dicatat bahwa model jaringan jalan
yang disimpan sebagai file teks sederhana agar
mudah diperluas dan dimodifikasi. Misalnya, jika
modeller ingin menambahkan crosswalk dalam 3
bagian dari jalan 2, bagian ini dapat menjadi dua
bagian, dan informasi baru dapat mensubstitusi
data dalam file teks, tanpa ada perubahan lebih
lanjut. Begitu juga, jalan jalan baru atau bagian
dapat ditambahkan ke jaringan oleh menambahkan
data baru ke file teks.
SIMULASI
• Setiap langkah dari simulasi terdiri dari tiga sub-langkah berikut:
• Mengimpor kendaraan
• Memperbarui posisi kendaraan
• Memajukan simulasi waktu
• Langkah-langkah di atas terdiri dari berbagai modul sistem. Oleh karena itu, setiap satu adalah independen dari yang lain, sehingga memungkinkan modeller untuk percobaan yang berbeda dengan set simulasi dari aturan.
• Model yang dilaksanakan dalam sistem yang diusulkan adalah asli oleh Nagel dan Schreckenberg. Aturan simulasi yang sama dan konvensi untuk sel dan panjangkecepatan maksimum yang diikuti. Pada setiap langkah waktu, peraturan , yang menentukan kecepatan dari setiap kendaraan yang akselerasi, perlambatan bawah dan Acak, dan pada akhirnya posisi kendaraan adalah diperbarui sesuai dengan kecepatan ini. Kemungkinan acak, disebut sebagai pdec, diperkenalkan pada sistem sebagai parameter dari masing-masing bagian jalan. Karena itu setiap bagian mungkin memiliki kemungkinan yang berbeda.
•
Dalam rangka untuk memvalidasi usulan dan metodologi alat
yang sesuai, serangkaian langkah-langkah yang harus dilakukan:
Pertama,
sederhana
lalu
lintas
model
simulasi
harus
menggunakan peraturan-peraturan yang asli CA model oleh
Nagel dan Schreckenberg. Selain itu, angka hasil harus disajikan
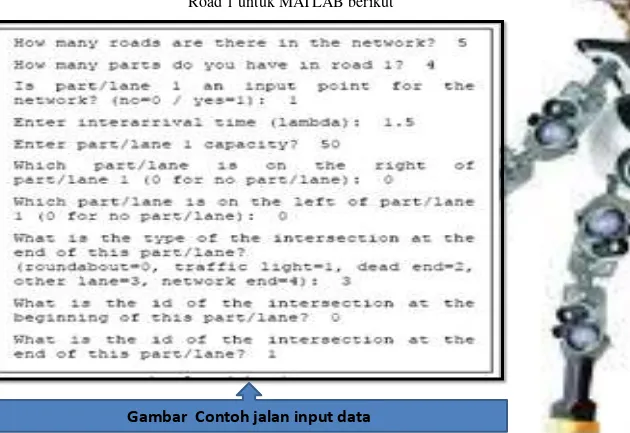
dan dibandingkan dengan hasil empiris. Jaringan sederhana yang
terdiri dari satu jalan dengan dua bagian adalah contoh simulasi
untuk mendapatkan hasil demonstrasi. Simulasi dilakukan untuk
dua berbeda nilai-nilai kemungkinan faktor pdec, yang melayani
tujuan acak dan menunjukkan seberapa sering kendaraan
kecepatan yang menurun Pengukuran minat ini adalah contoh
jumlah kendaraan yang pergi melalui jaringan di setiap langkah
simulasi.
•
Mempertimbangkan hasil dari model simulasi sederhana dan
kedekatannya dengan hasil empiris, yang handal dari usulan alat
didirikan. Jadi, lebih lanjut eksperimen dengan lebih kompleks
lalu lintas model dapat dimanfaatkan.
•
Kesimpulan dan rancana masa
mendatang
• Usulan kerangka accommodates definisi dan eksperimen dari hierarhical modular dan model aturan simulasi independen dalam mode. Kami sedang bekerja pada sebuah studi kasus yang otonom dalam kota jaringan di pusat kota Athena, untuk hasil yang empiris sedang dikumpulkan. Hal ini akan memungkinkan validasi dari kompleks lalu lintas jaringan, sedangkan eksploitasi alternatif simulasi aturan, menggambarkan diterjemahkan berkendara perilaku di kota Athena, juga dieksplorasi. CA adalah adanya aturan untuk memastikan keakuratan. Langkah berikutnya diringkas sebagai berikut:
• Kemampuan untuk memasukkan jenis lain dalam metrik seperti yang lingkungan.
Program Lampu LaLu Lintas dengan C++
• #