Tugas Akhir – TE 091399
Desain Kontrol Fuzzy Berbasis Performansi H
∞dengan Batasan Input-Output
dengan Batasan Input-Output
untuk Sistem Pendulum-Kereta
Tito Febriarianto (2208100126)
Dosen Pembimbing:
Prof. Dr. Ir. Achmad Jazidie, M.Eng.
Jurusan Teknik Elektro ITS Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
Pokok Bahasan
PENDAHULUAN PERANCANGAN 1 2 HASIL PENGUJIAN PENUTUP PERANCANGAN 4 3Pendahuluan
•
Sistem Pendulum-Kereta (SPK) merupakan sistem
nonlinear tak stabil
•
Pada implementasi nyata, sinyal kontrol dan posisi
kereta terbatas pada nilai tertentu
•
Adanya
gangguan
dari
luar
dapat
mengganggu
Permasalahan Tujuan
Latar Belakang
•
Adanya
gangguan
dari
luar
dapat
mengganggu
Pendahuluan
•
Tidak mudah menstabilkan pendulum pada posisi
terbaliknya serta menjaga kereta pada titik tengah rel
•
Sinyal kontrol serta posisi kereta dapat melebihi
batasan yang ada pada plant nyata
Permasalahan Tujuan Latar BelakangMerancang
kontroler
fuzzy
Takagi-Sugeno
(T-S)
berbasis performansi H
∞yang memenuhi batasan
sinyal kontrol dan posisi kereta untuk stabilisasi
batang pendulum pada posisi terbaliknya
Pendahuluan
Permasalahan Tujuan
Perancangan
motor DC l pusat massa sistem sumbu rotasi x1 x2 Model Matematika Model FisikModel SPK FSC Skema PDC Kontroler LMI Gain
l m mc p) ( + = µ p c m m J l a + + = 2 Dengan : DC titik tengah rel Matematika
Perancangan
Fuzzy Stabilizing Controller (FSC)
Model SPK FSC Skema PDC Kontroler LMI Gain
Batas Rel Batas Rel Titik Tengah Rel
Perancangan
Skema Kontrol Robust H
∞Model SPK FSC Skema PDC Kontroler LMI Gain
Persamaan State-Space : ) ( ) ( 1 t C x t z = z ) ( ) ( ) ( ) (t Ax t B u t B w t xɺ = + u + w Performansi H∞ :
γ
γ
<
=
≠(
)
*
)
(
sup
2 2 1 0 2w
t
t
z
w Sinyal Kontrol : ) ( ) (t Kx t u = −Perancangan
Skema Kontrol Robust H
∞ SkemaModel SPK FSC PDC Kontroler LMI Gain
Batasan Input-Output : max
)
(
t
u
u
≤
max 2 2(
t
)
z
z
≤
Persamaan State-Space Keseluruhan:
) ( ) ( ) ( ) (t A B K x t B w t xɺ = − u + w ) ( ) ( 1 1 t C x t z = z ) ( ) ( 2 2 t C x t z = z
Perancangan
Parallel Distributed Compensation (PDC)
Skema PDC
Model Fuzzy Takagi-Sugeno (T-S)
Aturan Plant :
Bagian Premis Bagian Konsekuen
IF THEN ) ( ) ( ) ( ) (t A1x t B ,1w t B ,1u t xɺ = + w + u ) ( ) ( ) ( ) (t A2x t B ,2w t B ,2u t xɺ = + w + u
Model SPK FSC Kontroler LMI Gain
Aturan Kontroler :
IF THEN
IF THEN
himp. fuzzy sama himp. fuzzy sama
) ( ) ( ) ( ) (t A2x t B ,2w t B ,2u t xɺ = + w + u ) ( ) ( ) ( ) (t Ax t B , w t B,u t xɺ = r + wr + ur ) ( ) (t K1x t u =− ) ( ) (t K2x t u =− ) ( ) (t K x t u =− r
Rule-1 Rule-2 Rule-r
Perancangan
Aturan Plant dan Kontroler
PDC
Aturan Plant ke-1 :
IF x2 is M1 (sekitar 0 rad.) THEN xɺ(t) = A1x(t)+ Bw,1w(t)+ Bu,1u(t) ) ( ) ( 1,1 1 t C x t z = z ) ( ) (t C x t z =
Aturan Kontroler ke-1 :
IF x2 is M1 (sekitar 0 rad.)
THEN u(t) =−K1x(t)
Kontroler LMI Gain
Skema Model SPK FSC ) ( ) ( 2,1 2 t C x t z = z
Aturan Plant ke-2 :
IF x2 is M2 (sekitar ±0.2 rad.) THEN xɺ(t) = A2x(t)+ Bw,2w(t)+ Bu,2u(t) ) ( ) ( 1,2 1 t C x t z = z ) ( ) ( 2,2 2 t C x t z = z
Aturan Kontroler ke-1 :
IF x2 is M2 (sekitar ±0.2 rad.) THEN u(t)= −K2x(t) )] ( [ )) ( ( ) ( 2 1 2 t K x t x M t u i i i − =
∑
=Perancangan
Fungsi Keanggotaan
Kontroler 0.4 0.6 0.8 1 D e ra ja t K e a n g g o ta a n M2 M1 M2 PDC LMI Gain Skema Model SPK FSC -0.40 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.2 x2 (rad) D e ra ja t K e a n g g o ta a n − = 2 2 2 1 08 . 0 ) ( 5 . 0 exp )) ( (x t x t M )) ( ( 1 )) ( ( 2 1 2 2 x t M x t M = −Perancangan
Model Linear SPK
Kontroler
Linearisasi SPK pada titik kerja : x* =[0 0 0 0]T
− − = 00013 . 0 0 25256 . 0 0 1 0 0 0 0 1 0 0 1 A = 82722 . 0 0 0 1 , u B PDC LMI Gain Skema Model SPK FSC 0 15.04211 0 −0.00791 236991. Linearisasi SPK pada titik kerja : x* =[0 ±0.2 0 0]T
− − = 00791 . 0 0 69739 . 14 0 00013 . 0 0 23189 . 0 0 1 0 0 0 0 1 0 0 2 A = 21110 . 1 82638 . 0 0 0 2 , u B
Perancangan
Perumusan LMI (1)
Jika Didefinisikan V(x(t)) = x(t)TPx(t) dan P = PT ,
maka sistem memiliki performansi H jika terdapat matriks simetris Q
Sistem memiliki performansi H∞ jika terdapat fungsi Lyapunov sehingga :
0 ; 0 ) ( ) ( ) ( ) ( )) ( (x t + z1 t z1 t − 2w t w t < ∀t > Vɺ T
γ
TKontroler LMI Gain
PDC Skema
Model SPK FSC
maka sistem memiliki performansi H∞ jika terdapat matriks simetris Q
yang memenuhi LMI :
0 0 0 , 1 2 , , 1 , , , < − − − − + I Q C I B QC B B Y Y B QA Q A i z T i w T i z i w T i u T j j i u T i i γ 1 − = K P Yj j Dengan : Q = P−1 dan
Perancangan
Perumusan LMI (2)
Jika terdapat matriks simetris Q yang memenuhi LMI :
Sistem mampu memenuhi batasan input-output yaitu:
LMI max
)
(
t
u
u
≤
max 2 2(
t
)
z
z
≤
Kontroler Gain PDC Skema Model SPK FSCJika terdapat matriks simetris Q yang memenuhi LMI :
Dengan : Q = P−1 dan 0 2 max < − − − − β u Y Y Q i T i 0 2 max 2 , 2 , 2 < − − − − β z Q C QC Q i z T i z 1 − = K P Yj j Serta : β ≤ )) 0 ( (x V
Perancangan
Perumusan LMI (3)
Secara keseluruhan, sistem akan memiliki performansi H∞ dan mampu memenuhi batasan input-output yang ditentukan jika terdapat matriks simetris Q yang memenuhi LMI :
LMI T 0 < Θii 0 ) ( 2 1 < Θ + Θ + Θii ij ji Kontroler Gain PDC Skema Model SPK FSC Dengan : 1 − = P Q Yj = KjP−1 0 2 max < − − − − β u Y Y Q i T i 0 2 max 2 , 2 , 2 < − − − − β z Q C QC Q i z T i z 0 ) ( 2 ij ji ii 2 , 1 = i 2 1≤i ≠ j ≤ − − − − + = Θ I Q C I B QC B B Y Y B QA Q A i z T i w T i z i w T i u T j j i u T i i ij 0 0 , 1 2 , , 1 , , , γ dan
Perancangan
Perhitungan Gain State-Feedback (1)
Parameter yang digunakan adalah :
• A1 dan Bu,1 adalah matriks hasil linearisasi SPK di sekitar x2 = 0 radian
• A2 dan Bu,2 adalah matriks hasil linearisasi SPK di sekitar x2 = ±0.2 radian
• Bw,1 = Bu,1 dan Bw,2 = Bu,2.
• C1,1 = C1,2 = , yang menyatakan bahwa performansi
keluaran yang diambil adalah:
LMI Gain
]
1
.
0
1
.
0
1
.
0
30
[
Kontroler PDC Skema Model SPK FSC 1,1 1,2keluaran yang diambil adalah:
• C2,1 = C2,2 =
• β = 5
• umax = 17.5
• z2max = 0.4
• Parameter γ divariasi antara 1 dan 0 dan didapat hasil terbaik yaitu ketika γ =
0.81
)
(
1
.
0
)
(
1
.
0
)
(
1
.
0
)
(
30
)
(
1 2 3 4 1t
x
t
x
t
x
t
x
t
z
=
+
+
+
]
0
0
0
1
[
Perancangan
Perhitungan Gain State-Feedback (2)
Hasil solusi gain state-feedback yang didapat dengan penyelesaian LMI adalah : Gain ] 7295 . 68 3569 . 78 8664 . 262 3719 . 141 [ 1 = − − K ] 6241 . 68 8136 . 77 7421 . 261 5118 . 138 [ 2 = − − K
Dengan matriks stabilitas P adalah :
LMI Kontroler
PDC Skema
Model SPK FSC
Dengan matriks stabilitas P adalah :
− − − − − − − − = 1772 . 0 2269 . 0 6769 . 0 5079 . 0 2269 . 0 2937 . 0 8669 . 0 6667 . 0 6769 . 0 8669 . 0 5866 . 2 9418 . 1 5079 . 0 6667 . 0 9418 . 1 6473 . 1 103x P
∞-norm dari w(t) ke z1(t) atau tingkat pelemahan maksimal dari gangguan ke keluaran performansi adalah :
3090 . 0 * ) ( 1 s ∞ =γ = Tzw
Hasil Pengujian
Implementasi
Simulasi
Hasil Pengujian
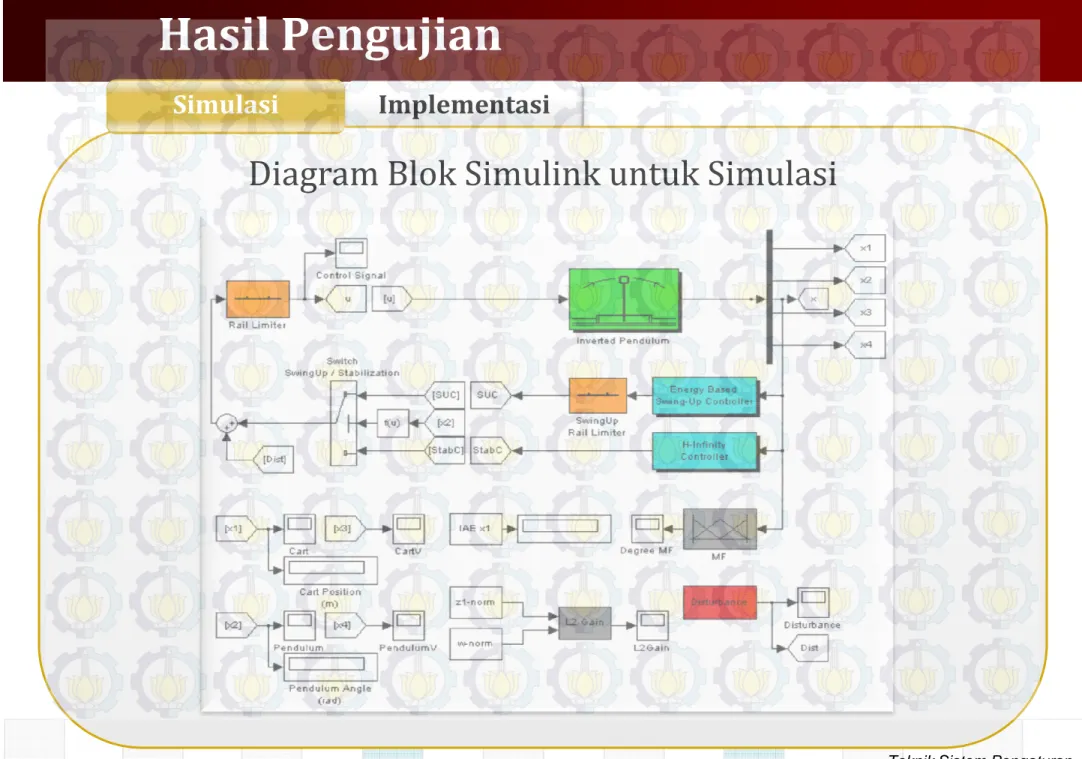
Simulasi
Pengujian Berbagai Kondisi Awal
0.02 0.04 0.06 0.08 0.1 P o s is i K e re ta ( m ) Kondisi Awal [0 0.2 0 -0.7] Kondisi Awal [0 0.4 0 -1.4] 0.3 0.4 0.5 P o s is i S u d u t P e n d u lu m ( ra d ) Kondisi Awal [0 0.2 0 -0.7] Kondisi Awal [0 0.4 0 -1.4] Implementasi 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 Waktu (s) P o s is i K e re ta ( m ) 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -0.2 -0.1 0 0.1 0.2 Waktu (s) P o s is i S u d u t P e n d u lu m ( ra d )
Respons Posisi Kereta Respons Posisi Sudut Pendulum
Hasil Pengujian
Simulasi
Pengujian Berbagai Kondisi Awal
0 2 4 S in y a l K o n tr o l (N ) T
x
(
0
)
=
[
0
0
.
2
0
−
0
.
7
]
5 73 . 0 )) 0 ( (x = ≤ V Implementasi Sinyal Kontrol 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -10 -8 -6 -4 -2 Waktu (s) S in y a l K o n tr o l (N ) Kondisi Awal [0 0.2 0 -0.7] Kondisi Awal [0 0.4 0 -1.4] Tx
(
0
)
=
[
0
0
.
4
0
−
1
.
4
]
5 93 . 2 )) 0 ( (x = ≤ V β ≤ )) 0 ( (x VHasil Pengujian
Simulasi
Pengujian dengan Gangguan
0.02 0.04 0.06 0.08 0.1 P o s is i K e re ta ( m ) γ Penyimpangan x1(m) IAE x1 0.90 0.0273 0.3043 0.3321 0.81 0.0248 0.2781 0.3090 0.75 0.0328 0.3607 0.3745 ∞ ) ( 1 s Tz w Implementasi
Respons Posisi Kereta
0 5 10 15 20 25 -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 Waktu (s) P o s is i K e re ta ( m ) Gamma 0.9 Gamma 0.75 Gamma 0.6 Gamma 0.81 0.75 ±0.0328 0.3607 0.3745 0.60 ±0.0370 0.4044 0.3837 lain yang 20 15 10 5 N, 0 N, 5 . 3 N, 5 . 3 ) ( t t t t w ≤ ≤ ≤ ≤ − = T
x
(
0
)
=
[
0
0
.
4
0
−
1
.
4
]
Kondisi Awal :Hasil Pengujian
Simulasi
Pengujian dengan Gangguan
-2 0 2 4 6 S in y a l K o n tr o l (N ) 0.3 0.4 0.5 P o s is i S u d u t P e n d u lu m ( ra d ) Gamma 0.9 Gamma 0.75 Gamma 0.6 Gamma 0.81 Implementasi Sinyal Kontrol 0 5 10 15 20 25 -14 -12 -10 -8 -6 -4 -2 Waktu (s) S in y a l K o n tr o l (N ) Gamma 0.9 Gamma 0.75 Gamma 0.6 Gamma 0.81
Respons Posisi Sudut Pendulum 0 5 10 15 20 25 -0.2 -0.1 0 0.1 0.2 Waktu (s) P o s is i S u d u t P e n d u lu m ( ra d ) T
x
(
0
)
=
[
0
0
.
4
0
−
1
.
4
]
Kondisi Awal :Hasil Pengujian
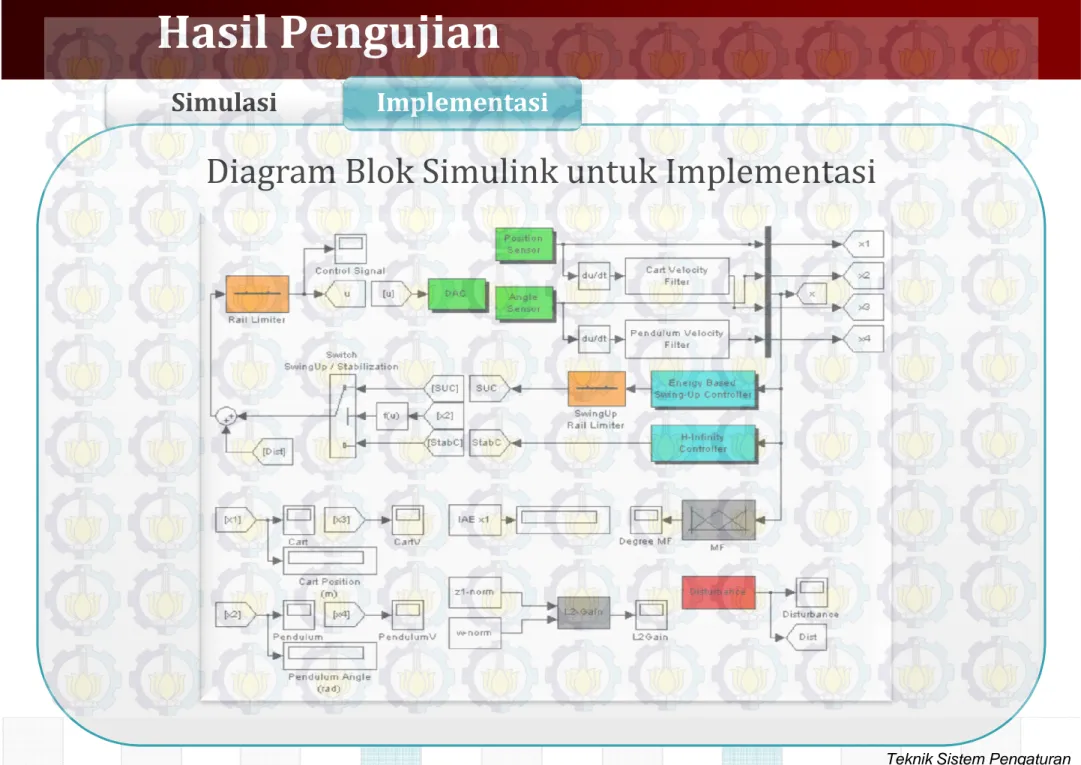
Simulasi
Diagram Blok Simulink untuk Implementasi
ImplementasiHasil Pengujian
Pengujian Awal
Implementasi 0.05 0.1 0.15 0.2 0.25 P o s is i K e re ta ( m )Sudut Awal 0.2 rad Sudut Awal 0.4 rad
0.3 0.4 0.5 P o s is i S u d u t P e n d u lu m ( ra d )
Sudut Awal 0.2 rad Sudut Awal 0.4 rad
Simulasi
Respons Posisi Kereta Respons Posisi Sudut Pendulum 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 Waktu (s) P o s is i K e re ta ( m ) 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -0.2 -0.1 0 0.1 0.2 Waktu (s) P o s is i S u d u t P e n d u lu m ( ra d )
Hasil Pengujian
Pengujian Awal
Implementasi -20 0 20 40 S in y a l K o n tr o l (N ) T x(0) =[0 0.2 0 0] 5 46 . 103 )) 0 ( (x = > V Simulasi Sinyal Kontrol 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -120 -100 -80 -60 -40 Waktu (s) S in y a l K o n tr o l (N )Sudut Awal 0.2 rad Sudut Awal 0.4 rad
T x(0) =[0 0.4 0 0] 5 85 . 413 )) 0 ( (x = > V β > )) 0 ( (x V
Hasil Pengujian
Pengujian Awal
Implementasi• Batasan pada sinyal kontrol tidak dapat terpenuhi, hal ini dikarenakan :
β > )) 0 ( (x V
• Tidak mudah untuk memberi kondisi awal pada kecepatan sudut
pendulum secara manual, oleh karena itu digunakan algoritma swing-up
Simulasi
pendulum secara manual, oleh karena itu digunakan algoritma swing-up
berbasis energi yang diusulkan oleh Astrom dan Furuta karena mampu membawa pendulum menuju posisi terbaliknya secara konsisten
• Algoritma swing-up berbasis energi atau Energy Based Swing-Up
Controller (ESUC) yaitu :
25 . 0 25 . 0 , 40 )], cos( sgn[ 8 1 1 1 2 4 > ≤ − = x x x x x usu 4 . 0 4 . 0 )], ( [ )) ( ( , 2 2 2 1 2 < ≥ − =
∑
= x x t x K t x M u u i i i suHasil Pengujian
Pengujian dengan Swing-Up dan Gangguan
Implementasi• Transisi dari algoritma swing-up ke algoritma stabilisasi terjadi pada waktu 2.382 detik
• Pada waktu 2.382 detik state sistem
adalah : 0.1 0.2 0.3 P o s is i K e re ta ( m ) Swing-Up Stabilisasi Simulasi
Respons Posisi Kereta
adalah :
• Karena maka sinyal
kontrol dan posisi kereta akan
memenuhi batasan yang ditentukan
T x(0) =[0.0583 0.4 −0.5738 −2.0805] 5 5908 . 0 )) 0 ( (x = ≤ V β ≤ )) 0 ( (x V 0 1 2 3 4 5 6 7 8 9 10 -0.3 -0.2 -0.1 0 Waktu (s) P o s is i K e re ta ( m )
Hasil Pengujian
Pengujian dengan Swing-Up dan Gangguan
Implementasi 0.1 0.2 0.3 P o s is i K e re ta ( m ) Tanpa Gangguan Dengan Gangguan• Besar simpangan posisi kereta ketika gangguan diberikan adalah :
0.024 m
• Hasil simpangan yang didapat pada
implementasi mendekati simpangan
Simulasi
Respons Posisi Kereta
0 5 10 15 20 25 30 -0.3 -0.2 -0.1 0 Waktu (s) P o s is i K e re ta ( m )
implementasi mendekati simpangan
pada simulasi, yaitu :
±0.0248 m -0.03 0 0.03 lain yang 25 20 15 10 N, 0 N, 5 . 3 N, 5 . 3 ) ( t t t t w ≤ ≤ ≤ ≤ − =
Hasil Pengujian
Pengujian dengan Swing-Up dan Gangguan
Implementasi 4 5 6 P o s is i S u d u t P e n d u lu m ( ra d ) Tanpa Gangguan Dengan Gangguan 5 10 15 20 S in y a l K o n tr o l (N ) Tanpa Gangguan Dengan Gangguan 0.02 SimulasiSinyal Kontrol Respons Posisi Sudut
Pendulum 0 5 10 15 20 25 30 -1 0 1 2 3 Waktu (s) P o s is i S u d u t P e n d u lu m ( ra d ) 0 5 10 15 20 25 30 -20 -15 -10 -5 0 Waktu (s) S in y a l K o n tr o l (N ) -0.02 0 0.02
Penutup
Kesimpulan