BAB II
LANDASAN TEORI
A. Sistem Koordinat Kutub
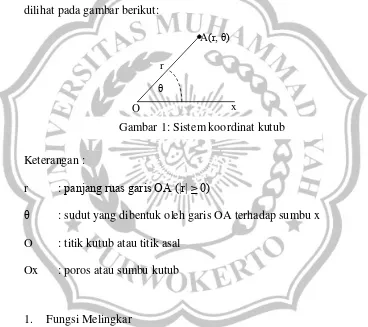
Pada sistem koordinat kutub, menurut Leithold (1991) bahwa sebuah titik ditentukan oleh sebuah jarak dan sebuah sudut. Sistem koordinat kutub dapat dilihat pada gambar berikut:
Keterangan :
r : panjang ruas garis OA (|r| ≥ 0)
θ : sudut yang dibentuk oleh garis OA terhadap sumbu x O : titik kutub atau titik asal
Ox : poros atau sumbu kutub
1. Fungsi Melingkar
Menurut Martono (1999), 𝑓 disebut sebagai suatu fungsi apabila terdapat 𝐴,𝐵 ⊂ 𝑅 dengan 𝑓:𝐴 → 𝐵 adalah suatu aturan yang menetapkan setiap 𝑡 ∈ 𝐴 dengan tepat satu 𝑦 ∈ 𝐵 dilambangkan dengan
𝑦=𝑓(𝑡). Fungsi melingkar (the circular function) atau fungsi trigonometri merupakan pengembangan dari sistem koordinat kutub,
A(r, θ)
θ r
O
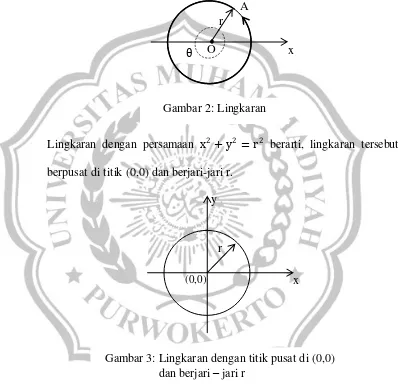
dimana jika titik A digeser dan kembali ke titik A dengan jarak OA tetap, maka akan membentuk lingkaran. Lingkaran adalah tempat kedudukan titik-titik yang berjarak sama dari suatu titik tetap. Titik tetap tersebut dinamakan titik pusat lingkaran.
Lingkaran dengan persamaan x2+ y2 = r2 berarti, lingkaran tersebut berpusat di titik (0,0) dan berjari-jari r.
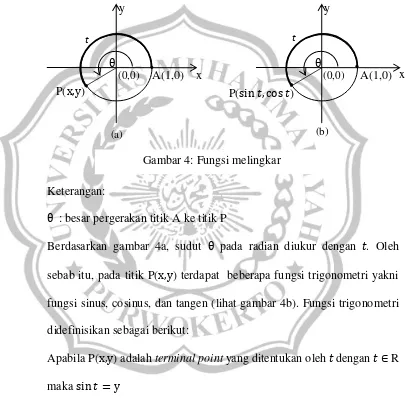
Jika terdapat sebuah lingkaran dengan persamaan x2 + y2 = 1, maka titik pusat lingkaran berkoordinat di (0,0) dan berjari-jari 1. Apabila titik A berkoordinat di (1,0) bergerak ke titik P sebesar θ satuan mengelilingi lingkaran (berlawanan arah dengan jarum jam jika
Gambar 3: Lingkaran dengan titik pusat di (0,0) dan berjari – jari r
(0,0) r y
x
θ
Gambar 2: Lingkaran
O x
θ> 0, bergerak searah dengan jarum jam jika θ< 0) maka dapat dicari
posisi titik P untuk setiap θ. Pergerakan titik A sebesar θ akan mendapatkan sebuah titik, titik ini disebut terminal point. Oleh sebab itu, titik P disebut terminal point (Vance, 1962).
Keterangan:
θ : besar pergerakan titik A ke titik P
Berdasarkan gambar 4a, sudut θ pada radian diukur dengan t. Oleh sebab itu, pada titik P(x,y) terdapat beberapa fungsi trigonometri yakni fungsi sinus, cosinus, dan tangen (lihat gambar 4b). Fungsi trigonometri didefinisikan sebagai berikut:
Apabila P(x,y) adalah terminal point yang ditentukan oleh t dengan t ∈ R maka sin𝑡= y
cos𝑡= x
tan𝑡= sin𝑡 cos𝑡=
y
x, x≠ 0
Oleh karena itu, berdasarkan gambar 4a dan 4b diperoleh definisi yakni (b)
t
P(sin𝑡, cos𝑡) P(x,y)
(a)
(0,0) A(1,0) y
x
θ
(0,0)
Gambar 4: Fungsi melingkar
A(1,0) y
x
apabila sudut θ pada radian diukur dengan t, maka sinθ= sin𝑡; cosθ= cos𝑡; tanθ= tan𝑡
Cos 𝑡 dan sin 𝑡 mempunyai periode 2π, sedangkan tan t mempunyai periode π. Domain dari fungsi sinus dan cosinus adalah semua nilai t dengan t ∈ R, sedangkan domain fungsi tangen adalah semua nilai t dengan t ∈ R kecuali 𝑡= π
2+π𝑚, dengan m adalah bilangan bulat (Kolman dan Shapiro, 1986). Range untuk fungsi sinus dan cosinus yakni:
−1≤ sin𝑡 ≤1 ; −1≤ cos𝑡 ≤1
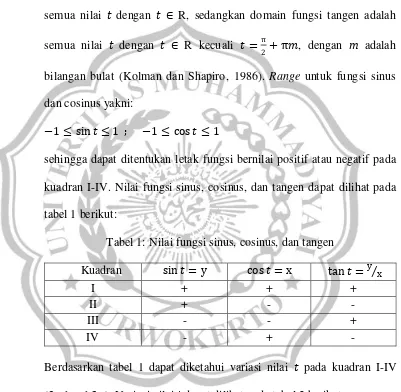
sehingga dapat ditentukan letak fungsi bernilai positif atau negatif pada kuadran I-IV. Nilai fungsi sinus, cosinus, dan tangen dapat dilihat pada tabel 1 berikut:
Tabel 1: Nilai fungsi sinus, cosinus, dan tangen
Kuadran sin𝑡 = y cos𝑡= x tan𝑡 =y x
I + + +
II + - -
III - - +
IV - + -
Berdasarkan tabel 1 dapat diketahui variasi nilai 𝑡 pada kuadran I-IV (0≤ 𝑡 ≤2π). Variasi nilai t dapat dilihat pada tabel 2 berikut:
Tabel 2: Variasi nilai fungsi sin 𝑡 dan cos 𝑡 pada 0≤ 𝑡 ≤2π kuadran Variasi 𝑡 dari Variasi nilai
sin 𝑡 dari
Variasi nilai cos 𝑡 dari
I 0 ke π 2 0 ke 1 1 ke 0
III π ke 3π
2 0 ke -1 -1 ke 0
IV 3π
2ke 2π -1 ke 0 0 ke 1
Berdasarkan tabel 2 dapat diketahui variasi nilai fungsi sinus dan cosinus pada kuadran I-IV.
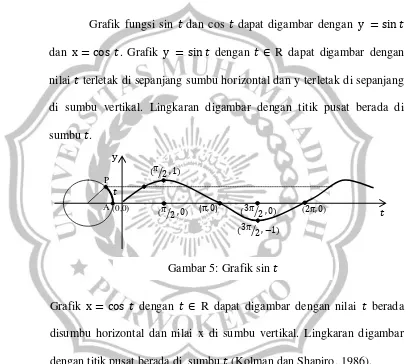
Grafik fungsi sin t dan cos t dapat digambar dengan y = sin𝑡 dan x = cos 𝑡. Grafik y = sin𝑡 dengan t ∈ R dapat digambar dengan nilai 𝑡 terletak di sepanjang sumbu horizontal dan y terletak di sepanjang di sumbu vertikal. Lingkaran digambar dengan titik pusat berada di sumbu 𝑡.
Grafik x = cos 𝑡 dengan t ∈ R dapat digambar dengan nilai 𝑡 berada disumbu horizontal dan nilai x di sumbu vertikal. Lingkaran digambar dengan titik pusat berada di sumbu 𝑡 (Kolman dan Shapiro, 1986).
a. Fungsi Genap dan Fungsi Ganjil Definisi 1a
Fungsi dikatakan fungsi genap jika 𝑓(−𝑥) =𝑓(𝑥) untuk setiap 𝑥 ∈ Df (domain fungsi), dan dikatakan fungsi ganjil jika 𝑓(−𝑥) =−𝑓(𝑥)
untuk setiap 𝑥∈ Df (Martono, 1999).
b. Fungsi Periodik Definisi 1b
Sebuah fungsi dikatakan periodik jika terdapat konstan 2𝑝 dimana
𝑓(𝑡 + 2𝑝) = 𝑓(𝑡) untuk setiap t. Jika 2𝑝 merupakan angka positif terkecil maka 2p merupakan periode fungsi (Wylie,1975).
2. Limit
Diberikan fungsi 𝑓: [𝑎,𝑏]→R dan 𝑐 ∈ 𝑎,𝑏 . Limit 𝑓(𝑥) untuk 𝑥 mendekati c adalah L, ditulis lim𝑥→𝑐𝑓(𝑥) =𝐿 berarti bahwa untuk tiap bilangan 𝜀 > 0 yang diberikan (betapapun kecilnya), terdapat 𝛽> 0 yang berpadanan sedemikian sehingga 𝑓 𝑥 − 𝐿 <𝜀 asalkan bahwa 0 < 𝑥 − 𝑐 <𝛽 berlaku 𝑓 𝑥 − 𝐿 <𝜀 (Purcell dan Varberg, 1984).
3. Kontinuitas
Diberikan fungsi 𝑓: [𝑎,𝑏] →R dan 𝑐 ∈ 𝑎,𝑏 . Fungsi 𝑓 dikatakan kontinu di 𝑐 jika lim𝑥→𝑐𝑓(𝑥) =𝑓(𝑐). Pernyataan tersebut menyatakan 3 syarat yang harus dipenuhi supaya fungsi f kontinu di c yaitu:
b. 𝑓(𝑐) ada
c. lim𝑥→𝑐𝑓(𝑥) =𝑓(𝑐)
Jika salah satu atau lebih dari ketiga syarat kekontinuan tidak terpenuhi maka 𝑓 tak kontinu (diskontinu) di c (Purcell dan Varberg, 1984).
4. Turunan
Diberikan 𝑓(𝑥) suatu fungsi yang didefinisikan di sebarang titik
𝑐 ∈ 𝑎,𝑏 , turunan 𝑓(𝑥) di 𝑥= 𝑐 didefinisikan sebagai:
𝑓′ 𝑐 = lim →0
𝑓 𝑐+ − 𝑓(𝑐)
Apabila suatu fungsi 𝑓 dapat dideferensialkan, maka fungsi tersebut merupakan fungsi yang kontinu. Fungsi sinus dan cosinus diketahui merupakan fungsi yang kontinu dan periodik, sehingga kedua fungsi tersebut dapat didiferensialkan (Purcell dan Varberg, 1984). Apabila
𝑓 𝑡 = sin𝑡 dan 𝑔 𝑡 = cos𝑡 maka berlaku
𝐷𝑡 sin𝑡 = cos𝑡 ; 𝐷𝑡 cos𝑡 = −sin𝑡
5. Integral
a. Integral Tak Tentu (Anti Turunan)
Menurut Purcell dan Varberg (1984) suatu fungsi 𝐹 disebut anti turunan fungsi 𝑓 pada selang I jika untuk ∀𝑥 ∈ I berlaku
𝐹′ 𝑥 =𝑓(𝑥) sehingga 𝑓 𝑥 𝑑𝑥=𝐹 𝑥 +𝑐 dengan c: konstanta.
Berdasarkan definisi tersebut, integral tak tentu pada fungsi sinus dan cosinus terhadap 𝑡 berlaku
sin𝑡𝑑𝑡 =−cos𝑡+𝑐 ; cos𝑡𝑑𝑡= sin𝑡 +𝑐
b. Integral Tentu
Menurut Martono (1999), integral tentu dari fungsi f pada selang tertutup [a,b], ditulis dengan lambang 𝑓𝑎𝑏 (𝑡)𝑑𝑡, didefinisikan sebagai 𝑓𝑎𝑏 (𝑡)𝑑𝑡= lim 𝑃 →0 𝑛𝑖=1𝑓(𝑐𝑖)∆𝑥𝑖 bila limit ini ada. Pada bentuk penulisan 𝜀 − 𝛽, limit fungsi f pada selang [a,b] untuk
𝑃 →0 adalah L, ditulis lim 𝑃 →0 𝑛𝑖=1𝑓(𝑐𝑖)∆𝑥𝑖, jika:
∀𝜀 > 0 ∃𝛽> 0 ∋ 𝑃 < 𝛽 ⇒ 𝑛𝑖=1𝑓 𝑐𝑖 ∆𝑥𝑖 − 𝐿 < 𝜀∀𝑐𝑖 ∈
𝑥𝑖−1,𝑥𝑖
Pada fungsi periodik, khususnya fungsi sinus dan cosinus, integral tentu berlaku teorema sebagai berikut:
Teorema A
Andaikan 𝑓 kontinu (karenanya terintegralkan) pada 𝑎,𝑏 maka terdapat suatu bilangan 𝑐 ∈ 𝑎,𝑏 sedemikian sehingga
𝑓𝑎𝑏 (𝑡)𝑑𝑡= 𝑓 𝑐 (𝑏 − 𝑎)
Jadi, apabila terdapat 𝑓 kontinu pada [𝑑,𝑑+ 2𝑝] maka terdapat suatu bilangan c antara 𝑑 dan 𝑑+ 2𝑝 sedemikian sehingga
𝑓(𝑡)𝑑𝑡
𝑑+2𝑝
6. Deret Fourier
Deret Fourier menurut Wylie (1975) yakni fungsi periodik yang dapat dinyatakan sebagai penjumlahan tak hingga dari suku-suku sinus dan cosinus. Fungsi 𝑓(𝑡) dengan 2𝑝 sebagai periode dan integral valid untuk setiap nilai 𝑑 dengan 𝑑 ∈R, fungsi dapat direpresentasikan menjadi bentuk persamaan sebagai berikut:
𝑓 𝑡 =𝑎0
Berdasarkan definisi tersebut, maka dapat ditentukan integral dimana integral valid untuk setiap nilai d dengan 𝑑 ∈R, serta m dan n merupakan bilangan bulat positif dengan persamaan sebagai berikut:
cos𝑚𝜋𝑡
Gunakan persamaan (2) dan (3) yakni:
𝑓 𝑡 𝑑𝑡= 𝑎0
Gunakan persamaan (2) dan (6) diperoleh:
Koefisien 𝑏𝑛 dapat dibuktikan dengan cara mengalikan persamaan
Gunakan persamaan (3) dan (6) diperoreh:
8. Ketetapan Dirichlet Definisi 8
Apabila 𝑓(𝑡) adalah suatu fungsi periodik yang terbatas dimana dalam sebarang satu periode memiliki sejumlah berhingga maksimum lokal dan minimum lokal serta sejumlah berhingga titik diskontinu, maka deret Fourier yang didefinisikan dengan fungsi 𝑓 akan konvergen ke 𝑓(𝑡) di semua titik jika 𝑓 kontinu dan akan konvergen pada rata-rata pada limit kanan dan limit kiri 𝑓(𝑡) di setiap titik jika 𝑓 tidak kontinu (diskontinu) (Wylie, 1975).
Oleh karena itu, dapat didefinisikan bahwa suatu deret Fourier dengan koefisien 𝑎𝑛 dan 𝑏𝑛 akan konvergen ke:
a. 𝑓(𝑡), jika 𝑓 kontinu b. 𝑓+ 𝑡 +𝑓−(𝑡)
2 , jika 𝑓 diskontinu
dalam hal ini 𝑓+ 𝑡 adalah limit kanan 𝑓 dan 𝑓−(𝑡) adalah limit kiri 𝑓.
B. Sistem Koordinat Bola
Sistem Koordinat bola merupakan perumusan sistem koordinat kutub ke ruang berdimensi tiga (Leithold, 1991). Sistem koordinat bola berguna untuk menyelesaikan masalah-masalah geometri dan fisika tertentu yang melibatkan suatu pusat simetri.
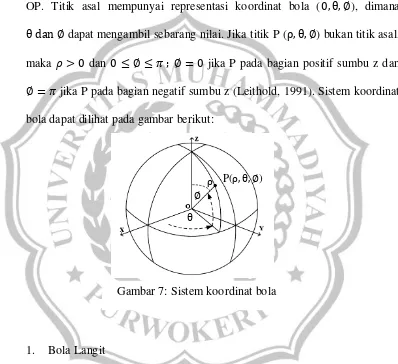
dalam koordinat bola dinyatakan oleh tiga bilangan, dan representasi koordinat bola dari suatu titik P adalah (ρ,θ,∅), dimana ρ= OP adalah jarak dari titik kutub (O) ke P, θ adalah ukuran sudut kutub dari proyeksi P pada bidang kutub dan ∅ adalah sudut antara sumbu z positif dan ruas garis OP. Titik asal mempunyai representasi koordinat bola (0,θ,∅), dimana
θ dan ∅ dapat mengambil sebarang nilai. Jika titik P (ρ,θ,∅) bukan titik asal, maka 𝜌> 0 dan 0≤ ∅ ≤ 𝜋 ; ∅ = 0 jika P pada bagian positif sumbu z dan
∅=𝜋 jika P pada bagian negatif sumbu z (Leithold, 1991). Sistem koordinat bola dapat dilihat pada gambar berikut:
1. Bola Langit
Bola langit adalah bola khayal dengan radius tak hingga dimana semua obyek langit dibayangkan berada pada di dalam bola langit. Hukum Kepler I menyebutkan bahwa bumi (dan planet-planet lain) bergerak dalam suatu lintasan elips dengan matahari pada satu fokusnya. Oleh sebab itu, lintasan elips juga berada di dalam bola langit. Lintasan
∅
P(ρ,θ,∅)
θ ρ
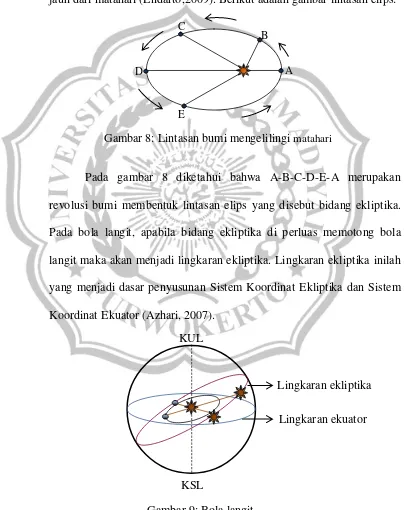
atau dengan kata lain bumi berevolusi sempurna dalam waktu satu tahun. Bumi beredar mengelilingi matahari dalam lintasan elips dan matahari berada pada salah satu titik fokusnya, sehingga pada suatu saat bumi berada pada jarak yang dekat dengan matahari dan pada saat lain berada jauh dari matahari (Endarto,2009). Berikut adalah gambar lintasan elips:
Pada gambar 8 diketahui bahwa A-B-C-D-E-A merupakan revolusi bumi membentuk lintasan elips yang disebut bidang ekliptika. Pada bola langit, apabila bidang ekliptika di perluas memotong bola langit maka akan menjadi lingkaran ekliptika. Lingkaran ekliptika inilah yang menjadi dasar penyusunan Sistem Koordinat Ekliptika dan Sistem Koordinat Ekuator (Azhari, 2007).
Gambar 8: Lintasan bumi mengelilingi matahari A
D
E
B C
KSL KUL
Gambar 9: Bola langit
2. Sistem Koordinat Ekliptika dan Sistem Koordinat Ekuator
Sistem koordinat ekliptika dan sistem koordinat ekuator terbentuk dari perpotongan antara lingkaran ekliptika, lingkaran ekuator, dan bujur standar di titik O (vernal equinox) atau titik Aries. Menurut Ali (1997), lingkaran ekliptika yaitu lintasan yang secara nisbi terlihat ditempuh matahari dalam perjalanan tahunannya. Menurut Simamora (1984), lingkaran ekuator atau ekuator langit (khatulistiwa langit) adalah lingkaran besar yang merupakan perluasan dari bidang ekuator bumi, sedangkan bujur standar yakni garis yang menghubungkan titik O (vernal Equinox) dengan titik puncak garis normal atau garis tegak lurus dengan bidang.
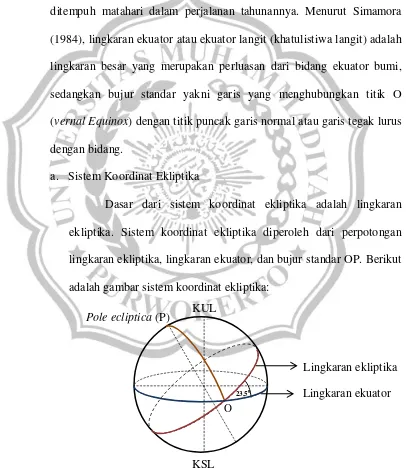
a. Sistem Koordinat Ekliptika
Dasar dari sistem koordinat ekliptika adalah lingkaran ekliptika. Sistem koordinat ekliptika diperoleh dari perpotongan lingkaran ekliptika, lingkaran ekuator, dan bujur standar OP. Berikut adalah gambar sistem koordinat ekliptika:
O
Gambar 10: Sistem koordinat ekliptika
Pole ecliptica (P)
Lingkaran ekliptika Lingkaran ekuator
23,50
KUL
Lingkaran ekuator dan lingkaran ekliptika berpotongan membentuk sudut 23,5° (lebih teliti membentuk sudut 23° 27′) di titik O (titik Aries). Matahari melewati titik Aries pada tanggal 20-21 Maret (Ali, 1997).
Garis normal bidang ekliptika menembus bola langit di titik P (pole ecliptica). Apabila dari titik P dihubungkan ke titik O maka akan diperoleh sistem koordinat ekliptika dengan lingkaran ekliptika sebagai lingkaran dasar utama dan bujur OP sebagai bujur standar (Azhari, 2007).
b. Sistem Koordinat Ekuator
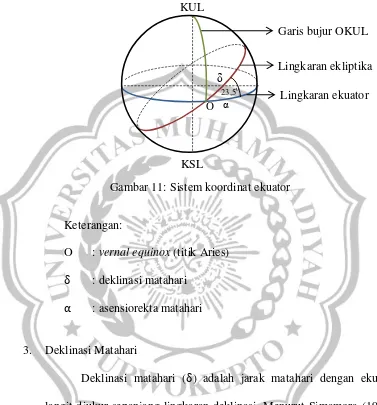
langit dan asensiorekta (α) yang dihitung dari titik O (Azhari, 2007). Gambar berikut merupakan gambar sistem koordinat ekuator:
Keterangan:
O : vernal equinox (titik Aries)
δ : deklinasi matahari
α : asensiorekta matahari
3. Deklinasi Matahari
Deklinasi matahari (δ) adalah jarak matahari dengan ekuator langit diukur sepanjang lingkaran deklinasi. Menurut Simamora (1984), lingkaran deklinasi adalah lingkaran-lingkaran pada bola langit yang ditarik dari kedua kutub langit yakni kutub utara langit (KUL) dan kutub selatan langit (KSL). Pada sistem koordinat ekuator, deklinasi matahari dihitung 0° jika tepat di ekuator, sebelah utara ekuator bernilai positif (+) dan sebelah selatan ekuator bernilai negatif (-). Nilai deklinasi di titik
Gambar 11: Sistem koordinat ekuator
23,50
α δ
Type equatio
O
Garis bujur OKUL KUL
KSL
+90°. Deklinasi matahari berubah-ubah setiap waktu selama satu tahun, tetapi pada tanggal-tanggal yang sama, deklinasi matahari akan sama pula (Ali, 1997).
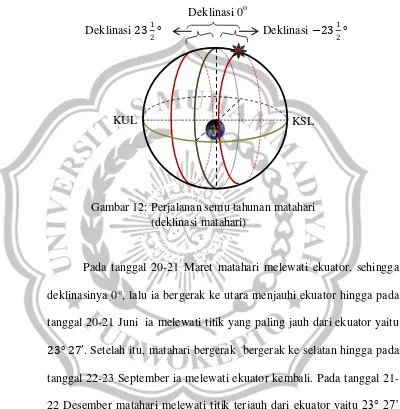
Pada tanggal 20-21 Maret matahari melewati ekuator, sehingga deklinasinya 0°, lalu ia bergerak ke utara menjauhi ekuator hingga pada tanggal 20-21 Juni ia melewati titik yang paling jauh dari ekuator yaitu 23° 27’. Setelah itu, matahari bergerak bergerak ke selatan hingga pada tanggal 22-23 September ia melewati ekuator kembali. Pada tanggal 21-22 Desember matahari melewati titik terjauh dari ekuator yaitu 23° 27’ di selatan ekuator. Setelah itu, matahari bergerak kembali ke utara mendekati ekuator hingga pada tanggal 20-21 Maret ia kembali melewati ekuator. Perjalanan matahari selalu sama setiap tahun, sehingga deklinasi matahari juga sama setiap tahun (Ali, 1997).
Gambar 12: Perjalanan semu tahunan matahari (deklinasi matahari)
KSL KUL
Deklinasi 231 2°
Deklinasi 0o
C. Sistem Koordinat Horizon
Sistem koordinat horizon menggunakan lingkaran horizon sebagai dasar untuk menentukan kedudukan benda angkasa. Menurut Simamora (1984), lingkaran horizon adalah lingkaran pada bola langit yang tegak lurus pada garis vertikal dan melalui titik pusat bumi (timur dan barat terletak pada lingkaran horizon). Sistem koordinat horizon hanya dapat menyatakan posisi benda langit pada satu saat tertentu, untuk saat yang berbeda sistem koordinat ini tidak dapat memberikan hubungan yang mudah dengan posisi benda langit sebelumnya.
Bentuk bumi yang bulat menyebabkan setiap tempat di muka bumi memiliki horizon yang berbeda-beda. Apabila kita berdiri tegak lurus lalu dari tempat kita berdiri dihubungkan dengan satu garis lurus yang melewati titik pusat bumi ke arah atas dan bawah (tegak lurus atau membentuk sudut 90° dengan horizon), maka akan memotong titik puncak bola langit bagian atas disebut dengan zenith dan bagian bawah disebut nadir (Ali, 1997).
Berikut adalah gambar sistem koordinat horizon:
Lingkaran meridian
KUL KSL
Gambar 13: Sistem koordinat horizon
Zenith
Nadir
Lingkaran vertikal
Berdasarkan gambar 13 diketahui bahwa melalui titik zenith dan nadir dapat dibuat lingkaran pada permukaan bola langit yang disebut dengan lingkaran vertikal. Lingkaran vertikal yang melalui titik KUL dan KSL disebut lingkaran Meridian (Azhari, 2007).
1. Bumi
Secara fisik, permukaan bumi merupakan bidang geoid. Geoid adalah bidang nivo (level surface) atau bidang ekuipotensial gaya berat yang terletak pada ketinggian muka air rata-rata. Arah gaya berat di setiap titik pada bidang geoid selalu tegak lurus menuju pusat bumi, sehingga bidang geoid merupakan permukaan tertutup yang melingkupi bumi dan bentuknya tidak teratur. Bidang geoid memiliki bentuk yang tidak teratur sehingga tidak dapat digunakan dalam perhitungan terkait dengan bentuk bumi. Oleh karena itu, agar dapat digunakan dalam perhitungan, maka bumi diibaratkan sebagai bidang yang bulat (speroid).
garis ekuator (Simamora, 1984). Berikut adalah gambar bumi dalam bentuk bulat pepat (oblate spheroid):
2. Posisi Tempat (Lintang dan Bujur Tempat)
Posisi tempat di muka bumi selalu erat kaitannya dengan garis lintang dan garis bujur. Apabila posisi tempat di muka bumi berbeda, maka lintang dan bujurnya berbeda pula.
Garis lintang (latitude) yaitu garis vertikal yang mengukur sudut antara suatu titik di Bumi dengan garis khatulistiwa. Apabila posisi tempat berada di sebelah utara garis katulistiwa maka didefinisikan sebagai Lintang Utara (LU). Apabila posisi tempat berada di sebelah selatan katulistiwa maka didefinisikan sebagai Lintang Selatan (LS). Garis bujur (longitude) yaitu garis horizontal yang mengukur sudut antara suatu titik tempat di Bumi dengan titik nol (0°) di Greenwich, London, Inggris yang menjadi dasar meridian. Meridian Greenwich ditetapkan menjadi meridian utama universal atau dasar meridian pada Konferensi Meridian Internasional tahun 1884. Apabila posisi titik di
Gambar 14: Bumi KUL
Garis khatulistiwa
sebelah barat bujur 0° maka dinamakan Bujur Barat (BB). Apabila posisi titik di sebelah timur 0° maka dinamakan Bujur Timur (BT). Posisi titik di Bumi dapat dideskripsikan dengan menggabungkan kedua pengukuran tersebut (Tanudidjaja, 1996).
Posisi lintang suatu tempat merupakan penghitungan sudut dari 0° di garis khatulistiwa sampai ke +90° di kutub utara dan -90° di kutub selatan. Posisi lintang biasanya dinotasikan dengan simbol huruf Yunani φ (phi). Posisi bujur suatu tempat merupakan pengukuran sudut dari 0° di Greenwich ke +180° arah timur dan -180° arah barat. Posisi bujur biasanya dinotasikan dengan abjad Yunani λ (lamda) (Tanudidjaja, 1996).
3. Edaran Harian Matahari
berkulminasi, dan waktu matahari terbenam berbeda-beda pula (Ali, 1997). Berikut adalah gambar edaran harian matahari di khatulistiwa saat deklinasi matahari 0°:
Keterangan:
A : Posisi matahari terbit (berada di horizon)
B : Posisi matahari berkulminasi (berada di titik zenith) C : Posisi matahari terbenam (berada di horizon) Hal-hal pada lintasan edaran harian matahari yakni: a. Tinggi matahari
Tinggi matahari adalah ketinggian posisi matahari (matahari yang terlihat) diukur dari horizon. Tinggi matahari biasanya diberi tanda h⨀ atau h yang merupakan singkatan dari high (ketinggian) sedangkan ⨀ merupakan simbol untuk matahari. Pada grafik deret Fourier, kuncinya yakni tinggi matahari saat terbit, berkulminasi,
Lingkaran ekuator
Gambar 15: Perjalanan matahari dari terbit hingga terbenam tepat di equator langit ( = 0)
Nadir
Lingkaran horizon Lingkaran meridian KSL
B
timur
KUL
C
A Matahari berkulminasi
barat
(h⨀ = h = 0). Tinggi matahari dapat diketahui melalui perhitungan ataupun menggunakan alat yang memang dibuat untuk mengukur tinggi matahari. Beberapa alat yang berfungsi untuk mengukur tinggi matahari antara lain, sextant dan theodolite (Ali, 1997).
b. Sudut Waktu Matahari
Sudut waktu matahari adalah sudut yang terbentuk dari lingkaran waktu dengan lingkaran meridian pada kutub utara atau kutub selatan langit yang biasa diberi tanda “t”. Besarnya sudut waktu menunjukkan jarak matahari dari kedudukannya saat berkulminasi.
Sudut waktu bernilai positif (+) jika matahari berkedudukan dibelahan langit sebelah barat (setelah matahari berkulminasi) dan bernilai negatif (-) jika matahari berkedudukan di belahan langit timur (sebelum matahari berkulminasi) (Ali, 1997). Rumus yang digunakan untuk menentukan sudut waktu matahari yakni:
cos t =−tanφtanδ+ sin h cosφcosδ
Secara umum di seluruh permukaan bumi terdapat 24 daerah waktu dimana setiap dua daerah waktu yang berdampingan selisihnya adalah 1 jam. Daerah-daerah waktu di seluruh dunia berpangkal pada daerah waktu meridian 0° yang dikenal dengan nama Greenwich Mean Time (GMT) (Ali,1997).
Di indonesia terdapat 3 daerah waktu yakni:
1) Waktu Indonesia Barat (WIB) dengan tolak ukur GMT + 07j. 00 berada di bujur standar 105° BT
2) Waktu Indonesia Tengah (WITA) dengan tolak ukur GMT + 08j. 00 berada di bujur standar 120° BT
3) Waktu Indonesia Timur (WIT) dengan tolak ukur GMT + 09j. 00 berada di bujur standar 135° BT
c. Perata Waktu (Equation of Time)
Perata Waktu (Equation of Time) adalah selisih antara waktu kulminasi matahari dengan waktu kulminasi matahari rata-rata. Perata waktu biasanya dinyatakan dengan huruf “e” (Ali,1997). d. Koreksi Waktu Daerah
terbit, waktu matahari berkulminasi, dan waktu matahari terbenam di masing-masing tempat. Oleh sebab itu, perlu dicari koreksi waktu secara akurat menggunakan rumus sebagai berikut:
KWD = 𝜆𝑠− 𝜆𝑡 15
Keterangan :
KWD : Koreksi Waktu Daerah
𝜆𝑠 : Bujur standar
𝜆𝑡 : Bujur tempat pengamat
4. Waktu Matahari Terbit, Berkulminasi dan Terbenam
Waktu matahari terbit, waktu matahari berkulminasi, dan waktu matahari terbenam dapat diketahui dengan menggunakan rumus sudut waktu. Sebagaimana telah diketahui bahwa pada waktu matahari terbit dan terbenam, tinggi matahari berada di 0°, sehingga besar sudut waktu pada saat h = 0 yakni:
cos t =−tanφtanδ+ sin cosφcosδ
= 0°⟹cos t =−tanφtanδ+ 0
=−tanφtanδ
t = arc cos (−tanφtanδ)
of time, KWD, dan sudut waktu, sehingga dapat diperoleh waktu matahari dari terbit sampai terbenam dengan menggunakan rumus: w⨀ = 12j – e + 1
15 (λs − λp + t)
Keterangan:
w⨀ : Waktu matahari berada di ketinggian tertentu
12j : Waktu matahari saat berkulminasi standar internasional (GMT) e : Equation of Time
λs : Bujur standar
λp : Bujur tempat pengamat t : Sudut waktu
12j – e dipengaruhi oleh posisi lintang tempat, KWD = 1
15 (λs − λp)
disebabkan oleh posisi bujur tempat, sedangkan 1
15t merupakan sudut
waktu berdasarkan jam. Sudut waktu senantiasa berubah sebesar 15° setiap jam , sehingga besar sudut waktu dibagi dengan 15 (Azhari, 2007).
Berdasarkan rumus tersebut dapat diketahui: 1) Waktu matahari terbit (tbernilai negatif)
w⨀ terbit = 12j– e + 1
15 (λs − λp −t)
2) Waktu matahari berkulminasi (t= 0)
w⨀ terbenam = 12j – e + 1
3) Waktu matahari terbenam (tbernilai positif)
w⨀ terbenam = 12j – e + 1
15 (λs − λp + t)
D. Aplikasi Deret Fourier pada Perhitungan Waktu Terbit, Kulminasi, dan Terbenam Matahari
Deret Fourier dengan definisi (1.1) atau (1.2) dapat ditranformasikan pada lintasan edaran harian matahari. Rumus lintasan edaran harian matahari dapat diperoleh dari rumus sudut waktu, sehingga rumus lintasan edaran harian matahari sebagai berikut:
sin= cos𝑡cosφcosδ+ sinφsinδ
Berdasarkan rumus tersebut dapat diperoleh tinggi matahari () yang menjadi dasar perhitungan waktu matahari terbit, waktu matahari berkulminasi dan waktu matahari terbenam. Tinggi matahari pada saat terbit dan terbenam adalah 0°. Pada waktu matahari berkulminasi tinggi matahari mencapai maksimum (𝑚𝑎𝑥) didefinisikan sebagai berikut:
𝑚𝑎𝑥 = 90°−(𝜑 − 𝛿)
φ
Gambar 16: Aplikasi deret Fourier δ
Lingkaran Horizon
𝑚𝑎𝑥 = 90°−(𝜑 − 𝛿)
KUL
Keterangan:
𝑚𝑎𝑥 : tinggi matahari maksimum (°)
δ : deklinasi matahari
φ : lintang tempat
: edaran harian matahari
Pada gambar 16 diketahui bahwa tinggi matahari saat berkulminasi (𝑚𝑎𝑥) dipengaruhi oleh lintang tempat pengamat (φ) dan deklinasi matahari (δ). Apabila tinggi matahari diketahui maka dapat diketahui pula besar sudut waktunya (t). Jika sudut waktu (t) sudah diketahui, bujur standar dan bujur tempat pengamat juga sudah diketahui maka dapat dihitung waktu matahari terbit sampai terbenam. Pada penelitian ini penelitian mencakup perhitungan waktu matahari terbit, waktu matahari berkulminasi, dan waktu matahari terbenam. Perhitungan waktu matahari terbit sampai terbenam didefinisikan sebagai berikut:
w⨀= 12j – e + 1
15 (λs − λp +𝑡)
Jika waktu matahari terbit, waktu matahari berkulminasi, dan waktu matahari terbenam diperoleh, maka dapat dicari rentang waktu edaran harian matahari. Rentang waktu edaran harian matahari atau bisa juga disebut rentang waktu matahari yakni waktu yang diperlukan matahari untuk melakukan perjalanan dari terbit sampai terbenam setiap hari. Rentang waktu edaran harian matahari didefinisikan sebagai berikut: