PERHITUNGAN
PERHITUNGAN
PADA MOTOR
PADA MOTOR
INDUKSI
INDUKSI
slip,
slip, frekuensifrekuensi dandan GGL GGL dandan reaktansireaktansi induktifinduktif padapada motor motor
Ns Nr Ns s = − 120 . 1 p Ns f = 120 ) ( 2 p Nr Ns f = − 1 2 1 2
.
:
)
(
f
s
f
maka
s
Ns
Nr
Ns
f
f
=
=
−
=
KecepatanKecepatan slip = Ns slip = Ns –– NrNr maka
maka slip (s):slip (s):
Hubungan
Hubungan frekuensifrekuensi sumbersumber dan
dan frekuensifrekuensi rotor rotor adalahadalah::
GGL
GGL induksiinduksi padapada motor:motor:
m N f E1 = 4,44. 1. 1.φ 2 2 2 2 2 1 2 . . . . . 44 , 4 . . . 44 , 4 E s N f s E N f E m S m S = = = φ φ Reaktansi
Reaktansi induktifinduktif padapada motor:motor:
1 1 2. .f X = π 2 1 2 2. .s.f s.X X S = π =
RANGKAIAN EKIVALEN MOTOR INDUKSI PERFASA
RANGKAIAN EKIVALEN MOTOR INDUKSI PERFASA
)
(
)
(
[
2 2 2 2 2 2 2 2 2 2 2 2 2X
s
r
E
sX
r
sE
Z
sE
i
+
⎥⎦
⎤
⎢⎣
⎡
=
+
=
=
ArusArus
Arus input Iinput I11 = V= V1 1 / / ZZtt Ampere (A)Ampere (A) dengan
dengan:: Z
Ztt= = impedansiimpedansi total motor total motor perfasaperfasa Faktor
Faktor dayadaya motor: motor: CosCos ϕϕ11 = (= (rrtt+R+Rtt)/Z)/Ztt Daya
Daya input input riilriil : P: PII = V= V11 II11 CosCos ϕϕ11 (Watt)(Watt) Daya
Daya reaktifreaktif input : Qinput : Q11 = V= V11 II11Sin Sin ϕϕ1 1 (VAR)(VAR) RANGKAIAN EKIVALEN MOTOR INDUKSI PERFASA
RANGKAIAN EKIVALEN MOTOR INDUKSI PERFASA
) ' ( ' ' ) ' ( ' [ ' ' ' ' 2 2 2 2 2 2 2 2 2 2 2 2 2 X s r E sX r sE Z sE i + ⎥⎦ ⎤ ⎢⎣ ⎡ = + = = Arus
Arus padapada rotor rotor dilihat
Faktor
Faktor dayadaya rotor : rotor : CosCos ϕϕ22 = r= r22/(r/(r’’22+jX+jX’’22) ) Rugi
Rugi--rugirugi padapada rotor: Protor: P22 = (I= (I’’22))22.r.r’’ 2
2
Daya
Daya input rotor : Pinput rotor : Pgg= E= E11 II22 CosCos ϕϕ22 =
= (I(I’’22))2.2. (r(r’’ 2
2/s) Watt/s) Watt
=
= dayadaya melaluimelalui celahcelah udaraudara Daya
Daya mekanikmekanik PPmm= P= Pgg–– PP22= P= Pgg–– s.Ps.Pgg= (1= (1--s) Ps) Pgg Daya
Daya output Poutput Poutout= (1= (1--s) Ps) Pgg–– PProtrot ==> P
==> Poo= P= Prot rot = = rugirugi--rugirugi rotasirotasi P
Poo = = rugirugi anginangin + + rugirugi gesekgesek ((sekitarsekitar 2 %)2 %) Untuk
Untuk menghitungmenghitung dayadaya dandan rugirugi--rugirugi dayadaya motor
motor dalamdalam 33--fasa,fasa, makamaka semuasemua dayadaya input, input, mekanik
mekanik, , rugirugi--rugirugi dayadaya dandan dayadaya output output dikalikan
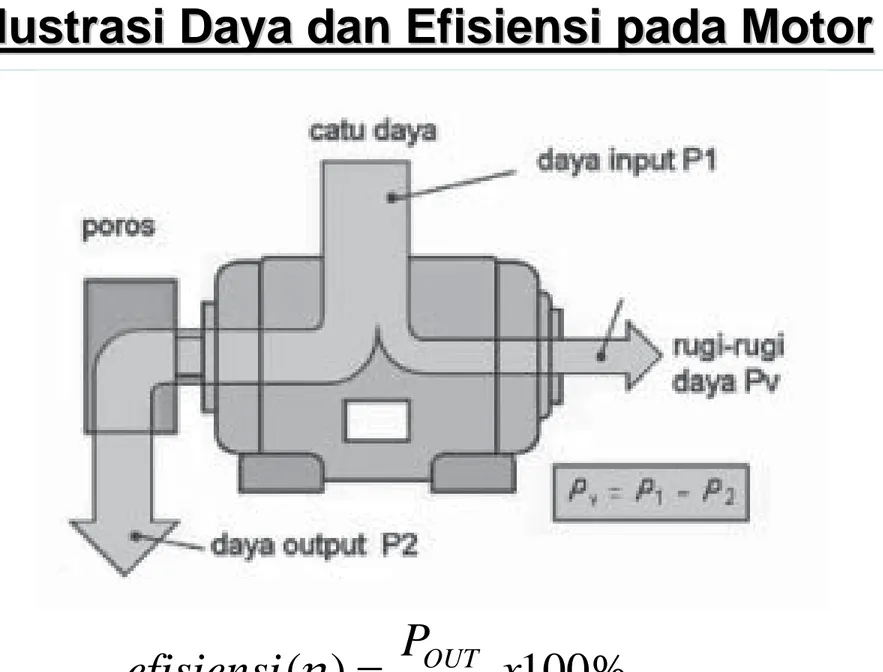
Ilustrasi
Ilustrasi
Daya
Daya
dan
dan
Efisiensi
Efisiensi
pada
pada
Motor
Motor
%
100
)
(
x
P
P
efisiensi
IN OUT=
η
Efisiensi
MENENTUKAN DAYA YANG
MENENTUKAN DAYA YANG
DIPERLUKAN UNTUK BEBAN KONSTAN
DIPERLUKAN UNTUK BEBAN KONSTAN
•
•
Pengangkatan
Pengangkatan
obyek
obyek
:
:
untuk
untuk
pengangkatan
pengangkatan
beban
beban
diperlukan
diperlukan
daya
daya
(P)
(P)
P = 9,8 P = 9,8 WW v x 100/v x 100/ηη ( W) ( W) = 9,8 = 9,8 WW v x 10v x 10--3 3 x 100/x 100/ηη (kW)(kW)atau
atau
:
:
P Pm m = (= (WW .v)/(102..v)/(102.ηη) ) ( kW) ( kW)Contoh
Contoh : :
Pesawat
Pesawat angkatangkat mengangkatmengangkat bebanbeban 4,5 ton 4,5 ton dengan
dengan kecepatankecepatan 12 m/min 12 m/min dengandengan wins wins koefisien
koefisien 85 %. 85 %. BerapaBerapa dayadaya mekanikmekanik ?? Jawab
Jawab : : dengandengan persamaanpersamaan didi atasatas :: (4,5 x 1000 x 12/60 x100
(4,5 x 1000 x 12/60 x100) )
= 10,4 kW 102 x 85
•
• MenggerakanMenggerakan obyekobyek secarasecara horisontalhorisontal ((misalmisal konveyor konveyor)) (C (C11v lv l +C+C22 Q l) (CQ l) (C11v +Cv +C22 Q ) lQ ) l 102 η x100 = Pm = 102 η
Nilai C1 dan C2 tergantung keahlihan pembuatan C2 = 0,01 - 0,015 nilai C1 lihat tabel
Lebar sabuk 0,3 0,4 0,5 0,6 0,8 1.0 C1 (kgW/m 0,48 0,77 1,24 1,47 2,06 2,90
x 100
• Beban cairan (pompa cairan)
daya listrik yang diperlukan :
Pm =
K x 1000 Q H 100 102
x
η (kW)
K = koefisien kesalahan dan perancangan ( 1.1 - 1.2) Efisiensi pompa standart
Kuantitas pompaan Q (m3/min) 0.1 0.3 1.0 10 30 100
Contoh
Contoh ::
Berapa
Berapa banyakbanyak dayadaya (kW) (kW) kirakira--kirakira diperlukandiperlukan untukuntuk pompa
pompa motor motor menaikanmenaikan air air melawanmelawan ketinggianketinggian 4 4 m
m padapada kecepatankecepatan 10 m10 m33 per per menitmenit, , efisiensiefisiensi
pompa
pompa 76 % 76 % Jawab
Jawab ;;
Menggunakan
Menggunakan rumusrumus sepertiseperti didi atasatas makamaka ukuranukuran motor
motor dapatdapat dicaridicari
(1,2 x 1000 x 10/60 x 4 x 100)/(102 x 76)
(1,2 x 1000 x 10/60 x 4 x 100)/(102 x 76)
= 10,32 kW
= 10,32 kW
ukuran
Torsi
Torsi elektromanetikelektromanetik atauatau internal torsi: internal torsi: T Tee = (I= (I’’22))22.(r.(r’’ 2 2/s)/ /s)/ ωω22 (Nm)(Nm) Torsi output: Torsi output: T Toutout = {(1= {(1--s)Ps)Pgg--PPoo}/2}/2ππnnrr (Nm)(Nm) Dengan Dengan:: n
nrr = = putaranputaran rotor rotor perdetikperdetik
Torsi
Karakteristik
Karakteristik
KARAKTERISTIK MOTOR INDUKSI
KARAKTERISTIK MOTOR INDUKSI
•• Motor Motor induksiinduksi, rotor , rotor sangkarsangkar ((squrrelsqurrel cagecage) 3) 3--fasafasa
Penggunaan :
serbaguna, beban berat (blower, bor-pres), cocok untuk daerah yang mudah ternbakar
• Motor induksi, rotor lilit
T n
Penggunaan : mesin diperlukan arus start, beban berat, beban berubah-ubah
rendah medium
Tingi
}
Membalik
Membalik araharah putaranputaran motor motor induksi
induksi 33--fasafasa
M 3 ~ arah putaran M 3 ~ arah putaran R S T T S R
A. Menegenai mesin beban, harus diperiksa :
1. Jenis mesin beban (dinamikanya) dari motor 2. Karakteristik perputaran kopel (torsi)
3. Jenis tugas: kontinyu, singkat, berubah- ubah, atrau siklus) 4. frekuensi pengasutan (jumlah start)
5. Sistem kendali pada beban 6. Momen inersia beban
7. Kecepatan per menit
8. Daya beban (kemampuan motor)
9. Cara pengasutan (otomatis atau tidak)
10. Cara pengereman apakah pemberhentian cepat atau tidak) 11. Apakah memerlukan pembalikan putaran atau tidak
12. Lokasi pemasangan mesin ( lembab atau panas)
13. Kondisi ambien dari lokasi (kondisi gas, korosif, kelembaban tinggi, debu, bising.
14. Cara kopling (rantai, gigi, langsung atau sabuk) 15. Cara instalasi
B. Mengenai Motor Listrik
• Karakteristik perputaran kopel dari motor • Kopel asut dan kopel pengunci
• Apakah kecepatan dapat dikendalikan ?
• Kemampuan nominal (kontinyu, waktu singkat, siklus) • Kecepatan motor
• Jenis motor
• Keluaran nominal motor
• Kapasitas, frekuensi, tegangan, jumlah kutub dari sumber daya
• Kelas isolasi
• Kendali yang dipakai
• Bentuk pelindung dari RANGKA (stator) • Ukuran poros
• Kedudukan mesin (horizontal, vertikal atau flens) • Alat tambahan (jenis puli)
PENGHITUNGAN DAYA LISTRIK
PENGHITUNGAN DAYA LISTRIK
pada
pada
PEMBEBANAN
PEMBEBANAN
•• BebanBeban gesergeser ( ( misalmisal konveyorkonveyor, , pengopakpengopak otomatisotomatis, , pres
pres cetakcetak, , mesingurindamesingurinda, , frisfris penghancurpenghancur :: •
• DayaDaya P yang P yang diperlukandiperlukan untukuntuk obyekobyek bergerakbergerak dengan
dengan kecepatankecepatan v(m/sv(m/s) ) melawanmelawan kakas kakas gesergeser sbbsbb::
P = F v (W)
P = F v (W)
P =
P = µµ W v (W) W v (W)
bila
bila obyekobyek membuatmembuat gerakgerak putarputar, , kopelkopel atauatau Torsi, TTorsi, T
T =
T = µµ W r (Nm/W r (Nm/radrad)) P =
bila
bila obyekobyek membuatmembuat gerakgerak putarputar, , kopelkopel TT T =
T = µµ W r (Nm/W r (Nm/radrad)) P =
P = ωω µµ WW r (W)r (W)
dengan
dengan : r = : r = jarijari--jarijari girasigirasi bantalanbantalan ((m/radm/rad))
W
W = = tekanantekanan vertikalvertikal padapada bantalanbantalan (N)(N) µ
µ = = koefisienkoefisien gesergeser dinamisdinamis (kg)/ton(kg)/ton µ
µss = = koefisienkoefisien gesergeser statisstatis
Koefisien
Koefisien gesergeser bantalanbantalan
Macam
Macam bnatalanbnatalan µµ µµ
s
s
Bantalan
Bantalan selonsongselonsong 0,001 0,001 –– 0,0060,006 0,05 0,05 –– 0,200,20 Bantalan
• Beban akselerasi (percepatan)
diperlukan kopel akselerasi untuk mengakselerasikan obyek,maka energi kinetik harus ditambahkan
Daya untuk akselerasi (P) = F v = m.a.v (W) untuk gerak putar kopel (T) = J α (Nm/rad)
Daya (P) = T ω = J α ω (W)
dengan : J : momen kelembaman (kgm2/rad2)
ω : kecepatan sudut (rad/s)
• Beban Gravitasi
Obyek diangkat melawan gravitasi
Kakas F diperlukan untuk mengangkat
obyek dengan masa m (kg)
pada kecepatan (m/s) adalah :
F = m g
(N)
•
•
Menentukan
Menentukan
daya
daya
dengan
dengan
beban
beban
yang
yang
berubah
berubah
-
-
ubah
ubah
daya
daya motor motor sulitsulit ditentukanditentukan cara
cara : : 1.
1. kuadratkuadrat ratarata--ratarata
T t P t P t P t P Pa 5 2 5 4 2 4 2 2 2 1 2 1 + + + = 6 5 4 3 2 1 t t t t t t T =
α
+ +β
+α
+ +β
βα Koefiensi akselerasi dan deselerasi = koefisien ketika berhenti
=
Tabel
Macam
Macam
Motor
Motor taktak serempakserempak ((macammacam terbukaterbuka)) 0,60,6 0,30,3 Motor
Motor taktak serempakserempak ((macammacam ventilasiventilasi tertutuptertutup seluruhnya
seluruhnya
0,7
0,7 0,40,4
Motor
Motor arusarus searahsearah 0,70,7 0,50,5
α
βKurva beban berulan :
t1 t2 t3 t4 t5 t6 T P1 P2 P3 P4 P5 P6
MOTOR LINEAR
MOTOR LINEAR
•
•
Motor linear
Motor linear
Æ
Æ
pengembangan
pengembangan
motor
motor
konvensional
konvensional
(motor
(motor
induksi
induksi
)
)
•
•
Prinsip
Prinsip
kerja
kerja
=
=
seperti
seperti
motor
motor
induksi
induksi
•
•
Keluaran
Keluaran
mekanik
mekanik
bekerja
bekerja
secara
secara
translasi
translasi
(
(
bukan
bukan
gerak
gerak
rotasi
rotasi
)
)
•
•
Prinsip
Prinsip
kerja
kerja
:
:
A
A’ primer
sekunder ferromanegnik
Lilitan tiga fasa
sekunder
c. Sekunder pendek d. dobel primer Gambar b digunaka untuk jarak yang panjang
c jarak pendek
d. dilengkapi dengan daya tarik magnetik Perubahaqn kecepatan :
Untuk motor rotasi -Æ ns = 2 fs/p perusahaan detik
•
• KecepatanKecepatan motor linearmotor linear v
vss = 2 = 2 ffss m per m per detikdetik Atau
Atau vvss = (1 = (1 –– s) s) vvss m per m per detikdetik Hubungan
Hubungan kecepatankecepatan dengandengan langkahlangkah kutubkutub
π
0,2 0,4 0,6 0,8. . . . meter/detik Kecepatan Vr Gaya geserDengan konduktor plat
Plat ferromagnetik Tegangan Penurunan Gaya geser Kecepatan Penurunan frekuensi Gaya geser Kecepatan
C efek perubahan tegangan sumber d. efek variasi kecepatan
Gaya geser : 1 cos 2 2 φ π η B ac L W F av m − − = Newton Daya elektromagnetik : 2 = e P kbkp Zab I r vs ϕi π π cos 2 ) 2 3 ( 1 Φ Watt 2 = e P
Dengan Dengan :: L Lmm = p = L= p = L
π
mm W L p B m r avϕ
= − Lm W Field system rotorEdge effect End effect
Direction Of motion A A’ b a
Sistem kemagnitan motor linear
APLIKASI MOTOR LINEAR
APLIKASI MOTOR LINEAR
Linear motor Sabuk berjalan (Conveyer) a
b
R B
Y
Filed system
Penggunaan
Penggunaan
a
a SistemSistem medanmedan tetaptetap dandan konduktorkonduktor travel travel daridari plat
plat
-- pintupintu dorongdorong otomatisotomatis dandan keretakereta listriklistrik
-- conveyer (conveyer (sabuksabuk berjalanberjalan))
-- alatalat peralatanperalatan mekanikmekanik
-- pesawatpesawat dorongdorong B
B SistemSistem medanmedan bergerakbergerak
-- motor linear motor linear kecepatankecepatan medium medium dandan tinggi
tinggi