BAB II
TINJAUAN PUSTAKA
2.1Motor Induksi
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas
digunakan dan dapat dijumpai di dalam setiap aplikasi industri maupun
rumahtangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini
bukan berasal dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai
akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating
magnatic field) yang dihasilkan arus stator [1].
Penggunaan motor induksi cukup banyak digunakan, hal ini dikarenakan
motor induksi mempunyai keuntungan yaitu:
1. Bentuknya sederhana, konstruksinya kuat
2. Biaya murah dan dapat diandalkan
3. Efisiensi tinggi. Pada keadaan normal tidak memerlukan sikat, sehingga
rugi – rugi gesekan dapat dikurangi.
4. Perawatan yang minimum
5. Pada waktu mulai beroperasi tidak memerlukan tambahan peralatan
khusus.
Namun disamping hal itu, perlu juga diperhatikan faktor – faktor yang
tidak menguntungkan yaitu pengaturan kecepatan sangat mempengaruhi efisiensi,
kecepatan akan berkurang apabila beban bertambah dan kopel mula lebih rendah
2.2Konstruksi Motor Induksi
Konstruksi Motor memiliki stator yang sama dengan motor sinkron, dan
hanya terdapat perbedaan pada konstruksi rotor. Stator dibentuk dari
laminasi-laminasi-laminasi tipis yang terbuat dari aluminium dan besi tuang, dan kemudian
dipasak bersama-sama untuk membentuk inti stator dengan membentuk inti stator
dengan slot. Kumparan (coil) dari konduktor-konduktor ini kemudian disisipkan
dalam slot-slot tersebut.
Rotor motor induksi tiga fasa dapat dibedakan menjadi dua jenis, yaitu
rotor sangkar (squirrel cage rotor) dan rotor belitan (wound rotor). Rotor sangkar
terdiri dari susunan batang konduktor yang dibentangkan ke dalam slot-slot yang
terdapat pada permukaan rotordan tiap-tiap ujungnya dihubung singkat
menggunakan shorting rings.
Gambar 2.1 Rotor Sangkar (Squirrel Cage Rotor)
Sementara itu pada rotor belitan, rotor dibentuk dari satu set belitan tiga
fasa yang merupakan bayangan dari belitan statornya. Biasanya belitan tiga fasa
dari rotor ini terhubung Y dan kemudian tiap-tiap ujung dari tiga kawat rotor
Gambar 2.2 Rotor Belitan (Wound Rotor)
Pada motor induksi rotor belitan, rangkaian rotornya dirancang untuk
dapat disisipkan dengan tahanan eksternal, yang mana hal ini memberikan
keuntungan dan memodifikasi karakteristik torsi-kecepatan dari motor.
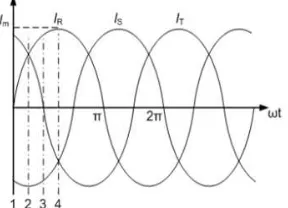
2.3Medan Putar
Perputaran motor pada arus bolak-balik ditimbulkan oleh adanya medan
putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya. Medan
putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak,
umumnya fasa tiga.
R = m sin ………(2.1)
S = m sin ….………...(2.2)
T = m sin ( ….………...(2.3)
Gambar 2.4 Arus tiga fasa seimbang
(i) (ii)
(iii) (iv)
Gambar 2.5 Medan Putar pada Induksi Motor Tiga Fasa
2.4Prinsip Kerja Motor Induksi
Motor induksi bekerja berdasarkan induksi elektromagnetik dari
kumparan stator kepada kumparan rotornya. Bila kumparan stator induksi 3-fasa
yang dihubungkan dengan suatu sumber tegangan 3-fasa, maka kumparan stator
akan menghasilkan medan magnet yang berputar. Garis-garis gaya fluks yang
diinduksikan dari kumparan stator akan memotong kumparan rotornya sehingga
timbul emf (ggl) atau tegangan induksi. Karena penghantar (kumparan) rotor
merupakan rangkaian yang tertutup, maka akan mengalir arus pada kumparan
fluks yang berasal dari kumparan stator sehingga kumparan rotor akan mengalami
gaya Lorentz yang menimbulkan torsi yang cenderung menggerakkan rotor sesuai
dengan arah pergerakan medan induksi stator. Untuk memperjelas prinsip kerja
motor induksi 3-fasa, maka dapat dijabarkan sebagai berikut:
1. Pada keadaan beban nol ketiga fasa stator yang terhubung dengan
sumber tegangan tiga fasa yang seimbang akan menghasilkan arus pada
tiap belitan fasa arus pada tiap fasa menghasilkan fluksi bolak-balik
yang berubah-ubah.
2. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan
arahnya tegak lurus terhadap belitan fasa
3. Akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya:
E1 = ………...(2.4)
E1= 4.44 N1 ………...(2.5)
4. Resultan dari ketiga fluksi bolak-balik tersebut menghasilkan medan
putar yang bergerak dengan kecepatan sinkron ns yang besarnya
ditentukan oleh jumlah kutub p dan frekuensi stator f yang dirumuskan
sebagai berikut:
ns = ………...(2.6)
5. Fluksi yang berputar tersebut akan memotong batang konduktor pada
rotor. Akibatnya pada kumparan rotor akan timbul tegangan induksi
sebesar E2 yang besarnya:
E2 = 4.44 N2 ………..(2.7)
Dimana:
N2 = jumlah lilitan rotor
memikul kopel beban, rotor akan berputar searah dengan medan putar
stator
9. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan
sinkron. Perbedaan kecepatan medan putar stator (ns) dengan
kecepatan rotor (nr) disebut slip (s) dinyatakan dengan
s =
...(2.8)
10.Pada saat rotor dalam keadaan berputar, besarnya tegangan yang
terinduksi pada kumparan rotor akan bervariasi tergantung besarnya
slip. Tegangan induksi ini dinyatakan dengan E2s yang besarnya:
E2s = 4.44s N2 ………(2.9)
Dimana:
E2s = tegangan induksi rotor dalam keadaan berputar (volt)
f2 = sf = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam
keadaan berputar)
11.Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan
mengalir pada kumparan rotor, sehingga tidak akan dihasilkan kopel.
2.5Rangkaian Ekivalen Motor Induksi
Operasi dari motor induksi tergantung pada induksi arus dan tegangan di
dalam rangkaian rotor yang berasal dari rangkaian stator karena adanya aksi
transformator. Karena adanya induksi arus dan tegangan pada motor induksi pada
dasarnya sama dengan operasi transformator, maka rangkaian ekivalen motor
induksi akan sangat menyerupai rangkaian ekivalen dari transformator. Motor
induksi disebut juga single exited mechine, sebab daya hanya disuplay oleh
rangkaian stator.
Karena mesin induksi tidak memiliki rangkaian medan, maka pada
modelnya tidak terdapat sumber tegangan EA sebagaimana dijumpai pada mesin
sinkron. Rangkaian ekivalen per fasa pada transformator dapat menggantikan
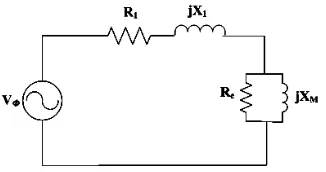
operasi dari motor induksi. Sebagiamana halnya pada transformator, maka akan
terdapat tahanan (R1) dan induktansi sendiri (X1) pada belitan stator yang
direpresentasikan dalam rangkaian ekivalen mesin.
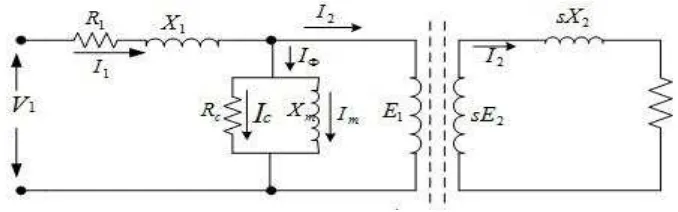
Gambar 2.6 Rangkaian Ekivalen Motor Induksi Sebagai Model Transformator
Tegangan stator E1 dikopel terhadap sisi sekunder ER sebagaimana halnya
transformator ideal dengan ratio belitan aeff. Rasio beban ini dengan mudah dapat
ditentukan pada motor induksi rotor belitan, yang mana dasar rasio ini merupakan
dengan motor induksi sangkar tupai, karena tidak terdapat belitan pada rotor
motor tersebut.
Tegangan ER pada rotor akan menghasilkan arus, karena rangkaian
rotornya terhubung singkat. Impedansi rangkaian primer dan arus magnitisasi dari
motor induksi sama halnya dengan komponen-komponen yang dijumpai pada
transformator. Hal yang membedakan rangkaian ekivalen tersebut pada motor
induksi dikarenakan terdapatnya variasi frekuensi pada tegangan rotor (ER)
impedansi rotor RR + JXR.
Ketika belitan diberikan pada belitan stator, maka tegangan akan
diinduksikan pada belitan rotornya. Pada umumnya gerak relatif yang lebih besar
di antara rotor dan medan putar stator, akan menghasilkan tegangan dan frekuensi
motor yang lebih besar juga. Gerak relatif yang terbesar terjadi saat rotor dalam
keadaan diam atau disebut keadaan blocked rotor. Sebaliknya, frekuensi dan
tegangan terendah timbul saat rotor berputar pada kecepatan yang sama dengan
kecepatan sinkron, sehingga tidak terdapat pergerakan relatif. Magnitud dan
frekuensi tegangan induksi rotor pada saat berputar sebanding dengan slip dari
rotornya. Sehingga besaran tegangan induksi rotor dalam kondisi rotor terkunci
disebut ERO,sedangkan untuk slip pada suatu putaran tertentu dirumuskan dengan:
ERO = SERO.………..(2.10)
Dan frekuensi induksi pada slip tertentu:
fr = s e………..(2.11)
Tahanan dari rotor RR bernilai konstan/tidak tergantung pada slip,
Reaktansi rotor tergantung pada induktansi rotor, frekuensi tegangan rotor
dan arus pada rotor. Bila induktansi rotor LR, maka reaktansi rotor adalah:
XR = rLR = 2 fr LR : fr = sfe
Sehingga:
XR = 2 sfe LR
= s(2 sfe LR)
= sXRO………(2.12)
LR = induktansi rotor
XRO= reaktansi blok rotor
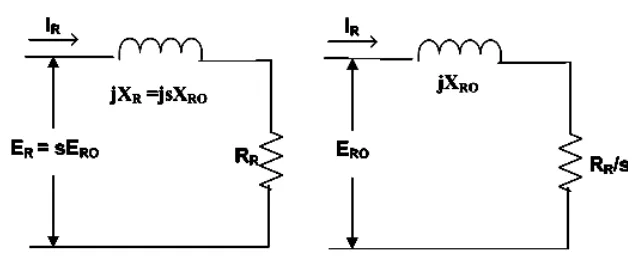
Gambar 2.7Rangkaian ekivalen rotor arus induksi Dari gambar 2.7 arus pada rotor dapat ditentukan sebagai:
………
(2.13)
………....
(2.14)
………..
(2.15)Dimana:
IR = arus rotor (A)
RR= tegangan rotor (Ω)
XR= reaktansi rotor (Ω)
Dalam teori transformator, analisa rangkaian ekivalen sering
disederhanakan dengan mengabaikan seluruh cabang magnetisasi atau dengan
memindahkan langsung ke terminal primer. Pendekatan demikian tidak
dibenarkan dalam motor induksi yang bekerja secara normal karena adanya celah
udara yang menjadikan perlunya suatu arus magnetisasi yang sangat besar (30%
sampai 40% dari arus beban penuh). Untuk itu dalam rangkaian ekivalen Rc dapat
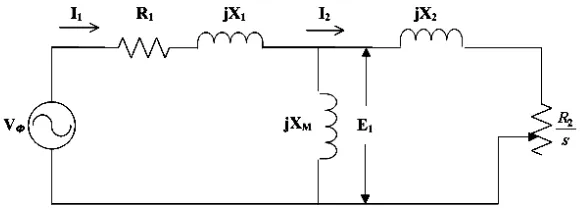
diabaikan. Rangkaian ekivalen adalah sama seperti gambar:
Gambar 2.8 Rangkaian ekivalen motor induksi jika rugi-rugi diabaikan
2.6. Penentuan Parameter Motor Induksi
Data yang diperlukan untuk menghitung kajian dari suatu motor induksi
dari hasil pengujian tanpa beban, pengujian rotor tertahan dan pengukuran tahanan
dc stator
2.6.1. Pengujian Tanpa Beban (No Load Test)
Pengujian tanpa beban pada motor induksi akan memberikan keterangan
berupa besarnya arus magnetisasi dan rugi – rugi tanpa beban. Biasanya pengujian
tersebut dilakukan pada frekuensi yang diizinkan dan dengan tegangan tiga
fasadalam keadaan setimbang yang dilakukan pada terminal stator. Pembacaan
bagian-bagian yang bergerak mengalami pelumasan sebagaimana mestinya.
Rugi-rugi rotasional keseluruhan pada frekuensi dan tegangan yang diizinkan pada
waktu dibebani biasanya dianggap konstan dan sama dengan rugi – rugi beban.
Pada keadaan tanpa beban, besarnya arus rotor sangat kecil hanya
diperlukan untuk menghasilkan torsi yang cukup untuk mengatasi gesekan.
Karena rugi-rugi I2R tanpa beban cukup kecil dan dapat diabaikan. Pada
transformator rugi-rugi I2R primernya tanpa beban dapat diabaikan, akan tetapi
rugi-rugi stator tanpa beban motor induksi besarnya cukup berarti karena arus
magnetisasinya lebih besar. Besarnya rugi – rugi rotasional PR pada keadaan kerja
normal adalah:
PROT = Pnl– 3InlR1……….……….(2.16)
Dimana:
Pnl = daya input tiga fasa (w)
Inl = arus tanpa beban tiap fasa (A)
R1 = tahanan stator tiap fasa (Ω)
Karena slip pada keadaan tanpa beban sangat kecil, maka akan mengakibatkan
tahanan rotor R2/s sangat besar. Sehingga cabang pararel rotor dan cabang
magnetisasi menjadi jXM di shunt dengan suatu tahanan yang sangat besar, dan
besarnya reaktansi cabang pararel karenanya sangat mendekati XM. Sehingga
besarnya reaktansi cabang pararel karenanya sangat mendekati XM. Sehingga
besar reaktansi yang tampak Xnl yang diukur pada terminal stator pada keadaan
tanpa beban sangat mendekati X1 + XMyang merupakan reaktansi sendiri dari
Xnl = X1 + XM………..(2.17)
Maka besarnya reaktansi dari stator dapat ditentukan dari pembacaan alat
ukur pada keadaan tanpa beban. Untuk mesin tiga fasa yang terhubung Y besarnya
impedansi tanpa beban Znl/fasa:
Z
nl√
……….……….
(2.18)Dimana Vnlmerupakan tegangan line, pada pengujian tanpa beban.
Besarnya tahanan pada pengujian tanpa beban Rnl adalah:
Rnl =
……….………
(2.19)Pnlmerupakan suplai daya tiga fasa pada keadaan tanpa beban, maka besar
reaktansitanpa beban
Xnl√ ………...………(2.20)
Sewaktu pengujian beban nol, maka rangkaian ekivalen motor induksi
seperti gambar 2.9 berikut:
Gambar 2.9 Rangkaian pengukuran untuk DC Test
2.6.2 Pengujian Tahanan Stator (DC Test)
Untuk menentukan besarnya tahanan stator R1 dilakukan dengan test DC.
Pada dasarnya tegangan DC diberikan pada belitan stator motor induksi. Karena
arus yang disuplai adalah arus DC, maka tidak terdapat tegangan yang
rotor. Dalam keadaan demikian, reaktansi dari motor juga bernilai nol, oleh
karena itu yang membatasi arus hanya tahanan stator.
Untuk melakukan pengujian ini, arus pada belitan stator diatur pada nilai
rated, yang dimana hal ini bertujuan untuk memanaskan belitan stator pada
temperature yang sama selama operasi normal. Apabila tahanan stator dihubung
Y, maka besar tahanan stator/fasa adalah:
R1 ………..(2.21)
Bila stator dihubung delta, maka besar tahanan stator
R1 ……….(2.22)
Dengan diketahuinya nilai dari R1, rugi-rugitembagastator pada beban nol
dapat ditentukan, dan rugi-rugi rotasional dapat ditentukan sebagai selisih dari
daya input pada beban nol dan rugi-rugi tembaga stator.
Gambar 2.10 Rangkaian pengukuran DC Test
2.6.3 Pengujian Rotor Tertahan (Block Rotor Test)
Pengujian ini bertujuan untuk menentukan parameter-parameter motor induksi
dan biasa juga disebut dengan locked rotor test. Pada pengujian ini rotor
Untuk melakukan pengujian ini, tegangan AC disuplai ke stator dan arus
yang mengalir diatur mendekati beban penuh. Ketika arus telah menunjukkan nilai
beban penuhnya, maka tegangan, arus dan daya yang mengalir ke motor diukur.
Rangkaian ekivalen untuk pengujian ini ada pada gambar 2.11
Gambar 2.11 Rangkaian Ekivalen Motor Induksi Pada Block Rotor Test
Saat pengujian ini berlangsung s = 1 dan tahanan rotor R2/s = R2. Karena
nilai R2 dan X2 begitu kecil, maka arus input akan seluruhnya mengalir melalui
tahanan dan reaktansi tersebut. Oleh karena itu, kondisi sirkit pada saat ini terlibat
seperti kombinasi seri X1, R1, X2 dan R2. Sesudah tegangan dan frekuensi diatur,
arus yang mengalir pada motor diatur dengan cepat, sehingga tidak timbul
kenaikan temperature pada rotor dengan cepat. Daya input yang diberikan kepada
motor adalah:
Pin= √ TIL………...………..……….(2.23)
Dimana:
VT = tegangan line pada saat pengujian berlangsung
IL = arus line pada saat pengujian berlangsung
ZBR=
√ ………..………..(2.24)
Dimana ZBR = impedansi hubung singkat
ZBR = RBR + jXBR
Tahanan block rotor:
RBR = R1+R2……….……….(2.26)
Sedangkan reaktansi block rotor X’BR =X1’+ X2’
X1’ + X2’ adalah reaktansi stator dan rotor pada frekuensi pengujian
R2 = RBR– R1 ……….………..(2.27)
Nilai dari R1ditentukan dari test DC. Karena reaktansi berbanding
langusng dengan frekuensi, maka reaktansiekivalen total (XBR) pada saat
frekuensi operasi normal
= X1 + X2………(2.28)
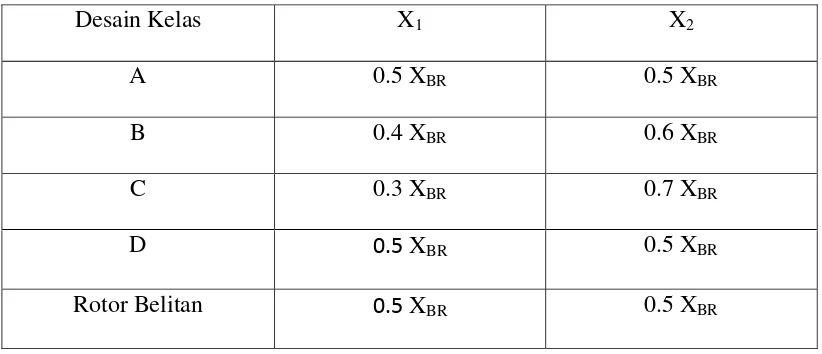
Untuk memisahkan harga X1 dan X2, maka dapat digunakan tabel 1
Tabel 2.1 Distribusi reaktansi X1dan X2maka digunakan tabel 1
Desain Kelas X1 X2
A 0.5 XBR 0.5 XBR
B 0.4 XBR 0.6 XBR
C 0.3 XBR 0.7 XBR
D 0.5 XBR 0.5 XBR
Rotor Belitan 0.5 XBR 0.5 XBR
2.7 Tegangan Tidak Seimbang
Dalam sistem tiga fasa yang seimbang, tegangan line to netral memiliki
magnitud yang sama dan tiap-tiap sudut fasanya berbeda 120 derajat satu sama
lain. Apabila terdapat tegangan tiga fasa yang magnitudnya tidak sama dan sudut
fasanya mengalami pergeseran sehingga tidak berbeda 120 derajat satu sama lain,
Penyebabtegangan tidak seimbang termasuk impedansi saluran transmisi
dan saluran distribusi yang tidak sama, distribusi beban-beban satu atau dua fasa
yang tidak merata dalam jumlah besar dan lain-lain. Ketika bebantiga fasa
seimbang dihubungkan dengan sistem suplai yang tidak seimbang, maka arus
yang dialirkan ke beban juga tidak seimbang. Oleh karena itu sangat sulit/tidak
mungkin untuk menyediakan suatu sistem suplai seimbang yang sempurna
kepada konsumen, sehingga perlu dilakukan berbagai upaya untuk
meminimalisasi ketidakseimbangan tegangan untuk mereduksi pengaruhnya pada
beban konsumen.
(a) (b)
Gambar 2.12 (a) Diagram Vektor Tegangan Seimbang
(b) Diagram Vektor Tegangan Tidak Seimbang
Metode yang biasa digunakan dalam menganalisa baik arus ataupun
tegangan dalam keadaan tidak seimbang adalah dengan menggunakan
komponen-komponen simetris yaitu suatu metode yang secara matematis memecahkan suatu
sistem yang tidak seimbang menjadi tiga buah sistem yang seimbang. Sistem
tersebut adalah urutan positif, urutan negatif dan urutan nol. Untuk sistem yang
(a) (b) (c)
Gambar 2.13 (a) Diagram Vektor Urutan Positif (b) Diagram Vektor Urutan Negatif
(c) Diagram Vektor Urutan Nol
Sistem urutan ini dapat dilukiskan secara fisika. Arah perputaran dari
motor induksi tiga fasa ketika diaplikasikan dengan tegangan urutan negatif akan
berlawanan arah dengan tegangan urutan positif. Sementara itu sistem urutan nol
tidak akan menimbulkan perputaran pada motor positif. Sementara itu sistem
urutan nol tidak akan menimbulkan perputaran pada motor motor induksi, karena
tidak ada perbedaan fasa pada ketiga tegangannya, sehinggatidak akan
dibangkitkan medan putar. Oleh sebab itu, ada dua definisi ketidakseimbangan
pada komponen-komponen simetris, yaitu:
1. Faktor ketidakseimbangan urutan negatif (
2. Faktor keseimbangan urutan nol (
Dimana V1, V2, V3 adalah urutan positif, urutan negatif dan urutan nol.
Sistem arus urutan nol tidak dapat mengalir pada sistem tiga fasa,
misalnya motor induksi. Oleh sebab itu faktor ketidakseimbangan urutan nol
sering diabaikan. Adapun ketidakseimbangan urutan negatif menunjuk pada
besarnya tegangan yang mencoba untuk memutar arah motor induksi tiga fasa
Adapun faktor ketidakseimbangan urutan negatif menurut IEC 60034-26 [2]
VLL = tegangan line-line tertinggi
Vll = tegangan rata-rata dari tegangan line
Sesuai dengan rumusan yang telah diberikan, dapat dilihat bahwa definisi
tegangan tak seimbang yang diberikan NEMA menghindari pemakaian aljabar
kompleks, sehingga kedua rumusan itu akan memberikan hasil yang berbeda.
Contoh tegangan tidak seimbang:
∠ , ∠ , ∠
Maka menurut persamaan 3.2 dan 3.3, maka besarnya Vab1 dan Vab2 adalah :
1 , ∠ 2 , ∠
Maka besarnya ketidakseimbangan menurut IEC adalah:
% � = ,
Sedangkan menurut NEMA adalah :
% � = ,
, x 100 = 10,78%
Tegangan tidak setimbang dalam persentase yang kecil akan menghasilkan
arus tidak seimbang dalam jumlah besar, yang mana hal ini akan menimbulkan
kenaikan temperatur pada motor. Jika tegangan yang tidak setimbang menyuplai
motor induksi, maka daya kuda nominal dari motor harus dikalikan dengan suatu
faktor seperti yang ditunjukkan pada gambar 2.14
Gambar 2.14 Kurva penurunan rating motor induksi (NEMA)
Menurut kurva ini, motor induksi dirancang sedemikian rupa sehingga
mampu menangani ketidakseimbangan 1% dan selanjutnya menurun pada tingkat
ketidakseimbangan. Operasi motor pada harga ketidakseimbangan diatas 5% tidak
diizinkan.
2.8 Rating Temperatur dan Metode Pengukuran Temperatur Motor Induksi
National Electrical Manufacturing Association (NEMA) mendefinisikan
temperature rise adalah kenaikan temperatur diatas temperature
ambient.Temperature ambient yaitu temperatur udara disekeliling motor atau
dapat dikatakan sebagai suhu ruangan. Penjumlahan dari temperature rise dan
temperature pada motor induksi dijelaskan oleh tabel berikut (temperatureambient
tidak lebih dari 40oC)
Tabel 2.2 Kenaikan Temperatur untuk motor besar dengan Faktor Pelayanan 1.0
No Motor Rating
Insulation Class and Temperature Rise
o
Faktor penyebab kerusakan isolasi belitan adalah panas berlebih dari motor.
Panas berlebih yang berlangsung lama pada lilitan akan menyebabkan stress pada
lilitan dan isolasi kawat menjadi rapuh. Jika dibiarkan terlalu lama, akan
menyebabkan isolasi pada lilitan akan retak. Jika gejala ini disertai dengan partial
discharge (peluahan parsial) maka proses penuaan akan semakin cepat. NEMA
dalam penelitiannya mengatakan bahwa usia dari isolasi belitan akan berkurang
setengahnya setiap kenaikan 10OC dari kondisi normal kerja motor. Akan tetapi
jika motor harus beroperasi 40OC di atas temperatur normal, maka umur
isolasinya menjadi 1/16 dari umur normal yang diperkirakan. Oleh sebab itu
motor-motor listrik yang digunakan di dunia industri menggunakan alat proteksi
panas lebih pada motor seperti thermal overload relay. Sehingga apabila terjadi
overheating pada motor, relay akan dapat segera bekerja sehingga dapat
Berikut adalah metode dalam menentukan temperatur motor induksi yaitu:
1. Menggunakan Thermometer Infrared
Gambar 2.15 Thermometer Infrared
Metode ini adalah penentuan suhu menggunakan sensor suhu, atau dengan
thermometer infrared, dengan metode ini diterapkan pada bagian mesin yang
dapat diakses.
2. Menggunakan Embedded Detector
Motor yang menggunakan embedded detector pada lilitannya dapat
dideteksi secara langsung output yang dideteksi pada peralatan. Output temperatur
yang ditunjukkan adalah temperatur terpanas dimana lokasi sensor diletakkan.
Perbedaan antara embedded detector tertanam di lilitan stator motor sedangkan
thermometer infrared dapat diletakkan dimana saja bagian motor yang paling
panas yang mudah diakses.
3. Mengukur Tahanan Motor
Metode digunakan untuk motor yang tidak memiliki embedded detector
seperti thermocouple atau Resistance Temperature Detectors (RTDs). Kelebihan
metode ini yaitu dapat dilakukan tanpa harus membongkar kerangka motor.
Penentuan temperatur dengan metode ini yaitu dengan membandingkan tahanan
lilitan motor pada temperatur yang ingin ditentukan (pada saat motor berada
temperaturnya (temperature ambient). Temperatur tahanan yang ingin ditentukan
dapat dihitung dengan persamaan:
T
t= T
b+ (
(Tb + k)……….
(2.33)Dimana:
Tt : Temperatur total lilitan (oC)
Tb : Temperatur pada saat motor dingin (oC)
Rt : Tahanan pada saat motor panas (Ω)
Rb : Tahanan pada saat motor dingin (Ω)
K : 234,5 (konstanta untuk tembaga) (oC) atau (225 konstanta