LAPORAN PENELITIAN
PENDULUM TAK LINIER
Oleh:
Sumarna
Agus Purwanto
JURUSAN PENDIDIKAN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS NEGERI YOGYAKARTA
PENDULUM TAK LINIER
(Oleh : Sumarna, Agus Purwanto)
ABSTRAK
Tujuan Penelitian ini adalah mengukur periode osilasi pendulum seteliti mungkin sehingga ketergantungan o pada dapat ditunjukkan dengan jelas. Selain itu juga untuk merancang dan membuat sistem alat ukur waktu yang dapat mengukur selang waktu dalam orde 10-6 detik.
Melalui pengukuran periode ayunan τo dengan tingkat ketelitian 10-6 detik telah
berhasil menunjukkan dengan jelas efek ketaklinieran pendulum, yaitu bahwa periode
ayunan τo tergantung pada besar sudut simpangan ayunan ψ. Selain itu juga telah direalisasikan prototype alat ukur selang waktu dalam orde 10-6 detik.
KATA PENGANTAR
Puji dan syukur yang sedalam-dalamnya dipanjatkan ke hadlirat Alloh S.w.t.,
Tuhan seru sekalian alam, atas segala karunia-Nya sehingga dapat tersusun laporan
penelitian mengenai Pendulum Tak Linier.
Penelitian ini dapat terlaksana juga karena bantuan dari berbagai pihak. Oleh
karena itu, terima kasih yang sebesar-besarnya dan penghargaan yang setinggi-tingginya
disampaikan kepada :
1. Pimpinan Universitas Negeri Yogyakarta yang telah memberikan kesempatan,
2. Pimpinan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri
Yogyakarta yang telah memberikan kesempatan dan dorongan,
3. Teman-teman dosen di Jurusan Pendidikan Fisika FMIPA UNY atas diskusi dan
masukan-masukannya,
4. Berbagai pihak yang tidak sempat disebutkan satu per satu yang telah membantu
terselenggaranya penelitian ini.
Semoga hasil penelitian ini dapat bermanfaat. Koreksi dan saran dari para
pengguna dan pemerhati diterima dengan hati terbuka dan penuh penghargaan.
Yogyakarta, 20 Nopember 2003
a/n. Tim Peneliti,
DAFTAR ISI
HALAMAN JUDUL ... i
ABSTRAK ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... iv
BAB I : PENDAHULUAN 1. Latar Belakang Masalah ……….……… 1
2. Rumusan Masalah ……..……….……… 2
3. Tujuan Penelitian ..……….………. 2
4. Manfaat Penelitian ……….………. 2
BAB II : KAJIAN TEORITIK ……….………. 3
BAB III : METODE PENELITIAN 1. Obyek Penelitian ……….…… 7
2. Teknik Pengumpulan Data ……….. 7
3. Instrumen untuk Mendapatkan Data ..………. 7
4. Teknik Analisis Data ……….……….……. 8
BAB IV : HASIL PENELITIAN DAN PEMBAHASAN 1. Realisasi Instrumen Pengambilan data ……….…….. 9
2. Hasil Penelitian dan Pembahasan ……….…. 11
BAB V : KESIMPULAN DAN SARAN 1. Kesimpulan ……….……. 13
2. Saran ……….……… 13
BAB I PENDAHULUAN
1. Latar Belakang
Pada dasarnya semua masalah mekanika bersifat tak linier. Makna tak linier di
sini adalah persamaan diferensial yang menggambarkan sistem mekanis yang ditinjau
adalah persamaan diferensial tak linier. Masalah mekanika dapat dianggap selesai bila
kita telah dapat menyatakan posisi dan kecepatan sistem sebagai fungsi dari waktu. Ini
berarti kita harus menyelesaikan persamaan diferensial yang mewakili sistem mekanis
tersebut. Namun, sayangnya, upaya mencari solusi secara umum terhadap persamaan
diferensial tak linier belumlah seekstensif upaya yang sama untuk persamaan diferensial
linier, sehingga tidak mengherankan bila tehnik penyelesaian persamaan diferensial
linier lebih banyak diketahui dibandingkan teknik yang sama untuk persamaan
diferensial tak linier. Inilah salah satu alasan mengapa persamaan diferensial tak linier
biasanya didekati dengan persamaan linier, suatu proses yang dikenal dengan linierisasi.
Dalam hal getaran, proses linierisasi biasanya dilakukan dengan mengasumsikan
simpangan getaran tidaklah terlalu besar. Dalam banyak hal pendekatan semacam ini
cukup bermanfaat, artinya penyelesaian yang diperoleh cukup dapat mewakili keadaan
fisis sistem yang ditinjau, sampai dengan tingkat ketelitian tertentu. Namun bila
dikehendaki untuk mempelajari perilaku sistem seteliti mungkin, kita harus berupaya
menyelesaikan persamaan diferensial tak linier yang memang benar-benar mewakili
sistem.
Sebagai upaya awal menghidupkan minat penelitian di kawasan tak linier, kami
mengajukan kasus riil pendulum tak linier. Proses linierisasi terhadap kasus ini biasanya
dilakukan dengan mengasumsikan simpangan pendulum tidaklah besar sehingga sin
dapat didekati dengan . Kami berharap dapat meneliti kasus pendulum ini sebagaimana adanya, yakni melalui penyelesaian persamaan diferensial tak linier -yang telah banyak
dijumpai pada literatur, misal McLachlan (1956)- dan kemudian mencoba
membandingkannya dengan hasil eksperimen. Sebagaimana akan ditunjukkan pada
simpangan maksimum (). Secara teknis, tantangan terbesar pada penelitian ini adalah upaya mengukur periode osilasi (o) seteliti mungkin sehingga ketergantungan o terhadap dapat diperlihatkan dengan jelas.
2. Rumusan Masalah
Persamaan yang mengatur gerak pendulum adalah persamaan diferensial tak
linier. Penyelesaian persamaan tersebut –dengan menggunakan bantuan integral elliptik-
menunjukkan bahwa periode osilasi pendulum o tergantung pada besar sudut simpangan maksimum . Masalah pada penelitian ini adalah bagaimana mengukur periode osilasi pendulum seteliti mungkin sehingga ketergantungan o pada dapat ditunjukkan dengan jelas. Untuk dapat mengukur periode osilasi tersebut dengan teliti
diperlukan sistem alat ukur yang dapat mengukur selang waktu dalam orde 10-6 detik.
3. Tujuan Penelitian
a. Mengukur periode osilasi pendulum seteliti mungkin sehingga ketergantungan
o pada dapat ditunjukkan dengan jelas.
b. Merancang dan membuat sistem alat ukur yang dapat mengukur selang waktu
dalam orde 10-6 detik.
4. Manfaat Penelitian
Sejauh ini, dari tingkat SMU hingga perguruan tinggi, masalah gerak pendulum
selalu didekati sebagai masalah linier. Untuk tingkat perguruan tinggi kami rasa sudah
saatnya untuk menjelaskan gerak pendulum tersebut sebagaimana adanya, yakni
memperlakukannya sebagai masalah tak linier. Termasuk di dalamnya adalah cara
praktikumnya. Dengan demikian, keberhasilan penelitian ini akan memberikan
sumbangan yang sangat berharga bagi pengajaran gerak pendulum tersebut. Alat yang
digunakan pada penelitian ini akan tetap bisa digunakan dan dikembangkan untuk
penelitian masalah tak linier lainnya. Sehingga keberhasilan penelitian ini diharapkan
BAB II
KAJIAN TEORITIK
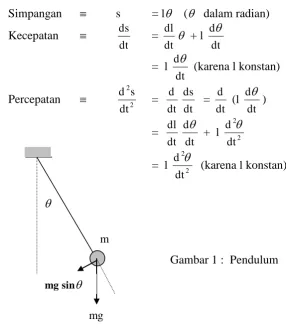
Memperhatikan gambar 1, persamaan gerak untuk pendulum tersebut dapat
dituliskan sebagai :
(massa).(percepatan) + “restoring force” = 0. (1)
Perhitungan percepatan :
Simpangan s = l ( dalam radian)
Substitusi ke persamaan (1) diperoleh :
Karena sin = -
tidak sama dengan 1, sehingga persamaan (3) adalah persamaan tak linier.
Dengan v =
A adalah konstanta integrasi)
(
dan diperoleh
v2 = 2a cos + A (6)
Jika simpangan maksimum adalah , maka pada simpangan maksimum tersebut v = 0 dan persamaan (6) menghasilkan :
0 = 2a cos + A A = - 2a cos .
Substitusi nilai A ke persamaan (6) menghasilkan :
maka (coscos) = )}
Dengan menyatakan sin 2 perhitungan waktu dimulai dari saat m berada di simpangan maksimum.
Dari sin
Persamaan (8) dapat ditulis ulang menjadi d = - 2 a k cos dt (8a)
Dengan demikian, dengan mengintegralkan (10) antara
2 Dari sini, periode diberikan oleh :
BAB III
METODOLOGI PENELITIAN
1. Obyek Penelitian
Obyek penelitian ini adalah sistem pendulum riil (sebagaimana adanya).
Pendulum yang dipelajari selama ini didasarkan pada asumsi bahwa simpangan sudut
kecil sehingga pendulum bersifat linier. Dengan asumsi tersebut mengakibatkan besar
sudut simpangan tidak berpengaruh terhadap periode ayunan. Padahal, dalam
kenyataannya, periode ayunan tergantung pada besar sudut simpangan.
2. Teknik Pengumpulan Data
Data dalam penelitian ini diperoleh melalui eksperimen. Variabel terikat yang
diamati adalah periode pendulum. Sedangkan variabel bebasnya adalah simpangan sudut
maksimum dan panjang pendulum. Dalam eksperimen ada beberapa hal yang harus
dikendalikan dengan sebaik-baiknya, antara lain tali harus kuat, ringan, halus dan tanpa
puntiran; beban pendulum harus kecil tetapi cukup berat; dan tempat eksperimen bebas
dari angin.
3. Instrumen untuk Mendapatkan Data
Instrumen yang dipergunakan untuk mendapatkan data dalam penelitian ini
berupa sistem peralatan pengukur periode pendulum. Sistem peralatan tersebut terdiri
dari pemancar cahaya (berkas cahaya sejajar dan sempit, intensitas relatif besar),
detektor cahaya (relatif peka), osilator (menghasilkan gelombang kotak dengan
frekuensi 1 Mhz presisi), tampilan dan pencatat, dan sistem pengendali pencacahan
otomatis. Sistem peralatan yang digunakan adalah rancangan dan buatan sendiri yang
dikalibrasi menurut alat ukur standar yang ada dilaboratorium fisika. Diagram
4. Teknik Analisis Data
Berkenaan dengan fenomena yang akan dipelajari melalui penelitian ini, maka
data percobaannya akan dianalisis dengan metode grafis, dan uji beda ( t atau F ).
Metode grafis untuk melihat secara global terhadap hubungan antara periode pendulum
dengan sudut simpangan maksimum. Sedangkan uji beda digunakan untuk menentukan
taraf sigifikansi terjadinya perbedaan antara hasil yang diperoleh melalui penelitian ini
dan nilai dalam tabel integral ellips.
Simpangan sudut maksimum
bandul tali
Pemancar cahaya
Detektor cahaya
Sistem pengendali pencacahan otomatis Osilator presisi
1 MHz.
Pencatat dan tampilan
BAB IV
HASIL PENELITIAN DAN PEMBAHASAN
1. Realisasi Instrumen Pengambilan data
telah dikemukakan sebelumnya bahwa data yang diamati pada penelitian ini
berupa besaran waktu yang menunjukkan periode ayun dari suatu pendulum. Terkait
dengan besaran tersebut maka instrumen untuk mendapatkan data pada dasarnya berupa
pencacat waktu. Sistem instrumen yang digunakan adalah rancangan dan buatan sendiri
yang dikalibrasi menurut alat ukur standar yang ada dilaboratorium fisika. Sistem
instrumen tersebut terdiri dari pemancar cahaya (berkas cahaya sejajar dan sempit,
intensitas relatif besar), detektor cahaya (relatif peka) beserta rangkaian penguatnya,
osilator (menghasilkan gelombang kotak dengan frekuensi 1 Mhz presisi), tampilan dan
pencatat, dan sistem pengendali pencacahan otomatis.
a. Pemancar dan detektor cahaya
b. Osilator
8k2
10 k 50 k
Z 3V2
C 458 A 564
100 LDR
LED
c. Tampilan
d. Sistem pengendali
7-segmen CC f g d a e b c
6 7 9 10 11 12 13 1 CD-4033 5 2, 8, 14 3, 16 15
7-segmen CC f g d a e b c
6 7 9 10 11 12 13 1 CD-4033 15 2, 8, 14 3, 16
+ Vcc
Reset Input
c g
Display Digital
100
2k2 2k2
10 k
C 458
CD 4033
4066
4066 + 5 volt 104
7408 47 k
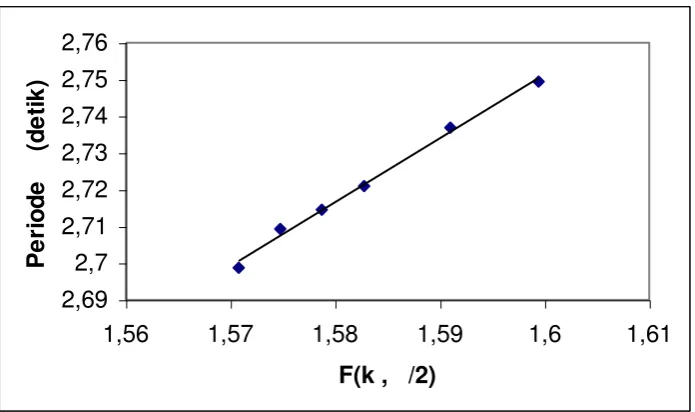
2. Hasil Penelitian dan Pembahasan
Persamaan (12) menunjukkan bahwa untuk panjang tali l tertenti terdapat
hubungan linier antara periode ayunan τo dan integral ellipse F(k2,
2
). Nilai integral
ellipse tersebut diperoleh dari Abramowitz dan Stegun (1972). Berikut ini adalah data
hasil penelitian :
No. Simpangan maksimum
Ψ (dalam derajat)
Periode τo
(dalam detik) k
2
F(k2, 2
)
1. 5 2,698735 0,0019 1,57080
2. 10 2,709295 0,0076 1,57475
3. 15 2,714546 0,0170 1,57874
4. 20 2,720917 0,0302 1,58278
5. 25 2,736846 0,0468 1,59100
6. 30 2,749456 0,0670 1,59942
Perlu disampaikan bahwa alat ukur yang digunakan untuk mengukur periode satu
ayunan (τo) dapat mengukur hingga satuan terkecil 10-6 detik. Oleh karena itu, dalam
data hasil penelitian perolehan pengukuran periode dapat dinyatakan hingga 6 angka di
belakang koma. Tanpa alat ukur seperti yang telah dikembangkan melalui penelitian ini
sangat sulit untuk menunjukkan perbedaan periode ayunan karena perbedaan sudut
simpangan, terutama untuk perbedaan sudut ayunan yang kecil. Sebagaimana terlihat
dalam data hasil penelitian, periode ayunan hanya berbeda pada orde 10-2 detik untuk
perbedaan sudut ayunan 5 derajat. Garfik yang menyatakan periode τo sebagai fungsi
dari F(k2, 2
) terlihat pada Gambar 2. Gambar 2 menunjukkan dengan jelas hubungan
linier antara periode τo dan integral ellipse F(k2,
2
). Kesesuaian antara Gambar 2
dengan persamaan (12) menunjukkan bahwa periode ayunan (τo) memang tergantung
2,69 2,7 2,71 2,72 2,73 2,74 2,75 2,76
1,56 1,57 1,58 1,59 1,6 1,61
F(k , /2)
Pe
ri
o
d
e
(d
e
ti
k
)
Gambar 2 : Ketergantungan periode ayunan τoterhadap sudut simpangan ψ
melalui integral ellipse F(k2, 2
)
Sebagai hasil samping dari penelitian ini dapat diperoleh nilai percepatan gravitasi (g) di
tempat pelaksanaan penelitian (Laboratorium Fisika, FMIPA, UNY), karena gradien
(slope) grafik pada Gambar 2 bernilai 4
g l
. Dalam penelitian ini diambil l = 189,5 cm
dan diperoleh slope = 1,740987, sehingga didapatkan nilai g = 1000,3 cm/detik2. Jika
dibandingkan dengan nilai g yang diperoleh tanpa memperhitungkan efek ketaklinieran,
yakni melalui persamaan τ = 2π
g l
, maka secara teori gtak linier memang harus lebih
besar dari pada glinier, karena secara umum 4 F(k2,
2
BAB V
KESIMPULAN DAN SARAN
1. Kesimpulan
Melalui pengukuran periode ayunan τo dengan tingkat ketelitian 10-6 detik telah
berhasil ditunjukkan dengan jelas efek ketaklinierang pendulum, yaitu bahwa periode
ayunan τo tergantung pada besar sudut simpangan ayunan ψ.
2. Saran
Sistem alat ukur yang telah dikembangkan melalui penelitian ini dapat digunakan
untuk mengukur periode ayunan pendulum ganda. Pertama untuk menyelidiki periode
ayunan pada daerah linier, di mana hal tersebut secara teori telah dapat diperhitungkan.
Ke dua diselidiki secara empiris pendulum ganda di daerah tak linier karena secara teori
DAFTAR PUSTAKA
Abramowitz, Milton and Irene A. Stegun (ed), 1972, Handbook Of Mathematical
Functions, Dover, New York.
Derenzo, S.E., 1990, Interfacing, Laboratory Approach Using the Microcomputer for
Instrumentation, data Analysis, and Control; Prentice-Hall International Inc.
Englewood Cliffs.
Jones, M.H., 1988, A Practical Introduction to Electronic Circuits, Second Edition,
Cambridge University Press, Cambridge.
Malmstadt, H.V., Enke, C.G., Crouch, S.R., 1981, Electronics and Instrumentation for
Scientists, The Benjamin/Cumming Publishing Company Inc., California.
McLachlan, N.W., 1956, Ordinary Non-Linear Differensial Equations in Engineering