xiii
DAFTAR ISTILAH
USART : Jenis komunikasi antar mikrokontroler tipe serial yang menggunakan pin transmitter dan receiver. Membership function : Nilai keanggotaan masukan dan keluaran dari
logika fuzzy.
Noise : gangguan yang tidak diinginkan dalam suatu sistem
DAC(Digital to Analog Converter) : cara mengubah sinyal digital menjadi sinyal analog untuk mengontrol suatu sistem tertentu.
AH : Muatan arus yang mengalir selama satu jam.
Threshold : nilai batas ambang
Hardware : perangkat keras sistem
1
BAB I
PENDAHULUAN
1.1
Latar Belakang
Mobil Listrik adalah mobil yang yang sumber utamanya menggunakan energi listrik. Penggunaan mobil listrik dirasa efektif untuk mengurangi polusi udara dan penggunaan bahan bakar. Perkembangan teknologi mobil listrik terus berkembang, banyak peneliti yang terus meneliti untuk meningkatkan performa, efisiensi, optimasi dan penilitian lainnya untuk menciptakan mobil listrik yang lebih baik. Hingga saat ini mobil listrik masih belum digunakan dalam jumlah besar dikarenakan keterbatasan jarak tempuh dari mobil listrik sebelum di charge kembali. Sehingga diperlukan alternatif lain unuk membuat mobil listrik lebih efisien dan optimal dalam penggunaan daya untuk motor.
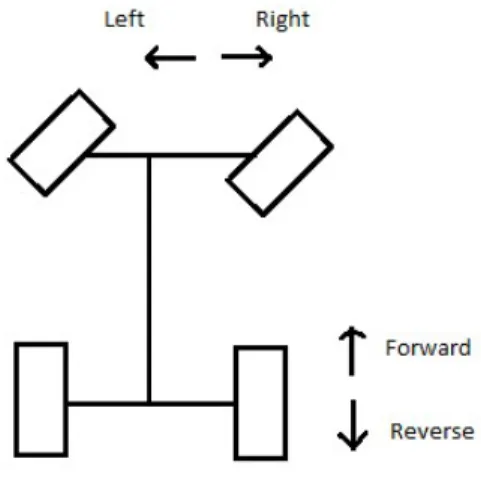
Mengacu pada permasalahan tersebut penulis mencoba membuat sebuah sistem menggantikan sistem yang sebelumnya menggunakan satu penggerak motor yang perlu ditambahkan sistem mekanik untuk menggerakkan roda tiap sisi nya. Pada tugas akhir ini sistem yang dibuat adalah untuk kendali kecepatan dua motor BLDC, sehingga tiap motornya bisa memiliki kecepatan berbeda di tiap sisi, motor BLDC ini terpasang pada roda belakang sisi kiri dan kanan, sehingga tidak memerlukan lagi tambahan sistem mekanik seperti saat penggunaan satu motor digantikan dengan pengendalian langsung kecepatan tiap motornya.
1.2
Maksud dan Tujuan
Adapun maksud dari rencana tugas akhir ini adalah untuk mengimplementasikan dan menganalisis penerapan logika Fuzzy-PID pada mobil listrik menggunakan dua motor listrik. Sedangkan tujuan dari penelitian ini adalah :
1. Membuat suatu sistem kendali untuk dua motor BLDC.
2. Mengetahui perfomansi dan efisiensi dari mobil listrik menggunakan sistem kendali kecepatan ini.
2
1.3
Rumusan Masalah
Masalah yang dibahas pada tugas akhir ini adalah :
1. Bagaimana cara merancang sistem kendali kecepatan untuk dua motor??
2. Bagaimana efisiensi dan perfomansi dari mobil tersebut setelah dipasangi sistem kendali kecepatan untuk dua motor?
3. Bagaimana pengaaruh dari penggunaan dari sistem ini?
1.4
Batasan Masalah
Batasan masalah yang digunakan dalam tugas akhir ini adalah :
1. Mobil listrik menggunakan dua motor BLDC yang dipasang di roda belakang. 2. Controller motor menggunakan controller 350W untuk pengendalian motor BLDC. 3. Untuk mengukur daya yang digunakan menggunakan Power Analyzer ET0505. 4. Parameter yang diamati pada pengujian ini adalah penggunaan daya saat
menggunakan sistem dan tanpa penggunaan sistem. 5. Pengujian dilakukan di dalam wilayah kampus.
6. Nilai derajat keanggotaan himpunan Fuzzy didefinisikan sebelumnya secara subjektif.
7. Mobil listrik memiliki batasan kecepatan sebesar 8 m/s
8. Mobil listrik dirancang untuk 2 penumpang dengan beban maksimal 200Kg 9. Sistem pengereman pada mobil listrik ini menggunakan pengereman mekanik
manual.
1.5
Metodologi Penelitian
Metodologi yang digunakan dalam tugas akhir ini adalah : 1. Studi Literatur
Penelusuran literatur yang bersumber dari buku, jurnal hasil penelitian, maupun media sebagai dasar dalam penyusunan teori maupun referensi berkaitan tugas akhir yang dikerjakan.
2. Perancangan dan Implementasi Alat
Melakukan pembuatan rancangan alat dan sistem sesuai dengan kebutuhan pengerjaan tugas akhir.
3 Melakukan pengujian alat yang sudah dibuat guna mendapatkan data yang diinginkan untuk selanjutnya dapat dianalisis.
4. Analisis Hasil Pengujian
Melakukan analisis data yang didapatkan dari hasil pengujian guna mendapatkan kesimpulan.
5. Pembuatan Laporan
Proses pembuatan laporan pengerjaan tugas akhir meliputi pembuatan buku tugas akhir dan jurnal tugas akhir.
1.6
Sistematika Penulisan
Sistematika penulisan yang digunakan dalam tugas akhir ini adalah sebagai berikut: BAB I PENDAHULUAN
Pada bab ini dibahas latar belakang, maksud dan tujuan, perumusan masalah, batasan masalah, dan metodologi penilitian yang digunakan dalam Tugas Akhir ini.
BAB II LANDASAN TEORI
Bab ini berisi dasar dan landasan teori yang digunakan dalam pengerjaan Tugas Akhir. BAB III PERANCANGAN DAN IMPLEMENTASI SISTEM
Pada bab ini dibahas tentang perancangan sistem meliputi diagram blok sistem, flowchart sistem, serta kebutuhan hardware dan software dalam pembuatan sistem.
BAB IV PENGUJIAN DAN ANALISIS SISTEM
Pada bab ini akan dibahas hasil pengujian sistem berupa data pembacaan sensor serta dilakukan analisis sistem guna mencapai kesimpulan dalam pengerjaan Tugas Akhir ini. BAB V PENUTUP
Bab ini berisi kesimpulan berdasarkan analisis sistem yang telah dibuat dan saran untuk penelitian lebih lanjut.
4
BAB II
LANDASAN TEORI
2.1
Mobil Listrik
Mobil listrik merupakan jenis mobil yang menggunakan listrik sebagai sumber energinya untuk bergerak. Energi disimpan pada baterai atau tempat penyimpanan energi lainnya. Penggunaan mobil listrik dianggap efektif dalam mengurangi terjadinya emisi gas rumah kaca karena tidak membutuhkan bahan bakar fosil sebagai penggerak utamanya. Selain itu, mobil listrik memiliki beberapa kelebihan yang potensial jika dibandingkan dengan mobil bermesin pembakaran dalam biasa. Hal yang paling utama adalah mobil listrik bisa di automasi dengan berbagai fitur yang bisa membantu manusia.
Gambar 2.1-1 Ilustrasi Electric Car
2.2
Motor Listrik
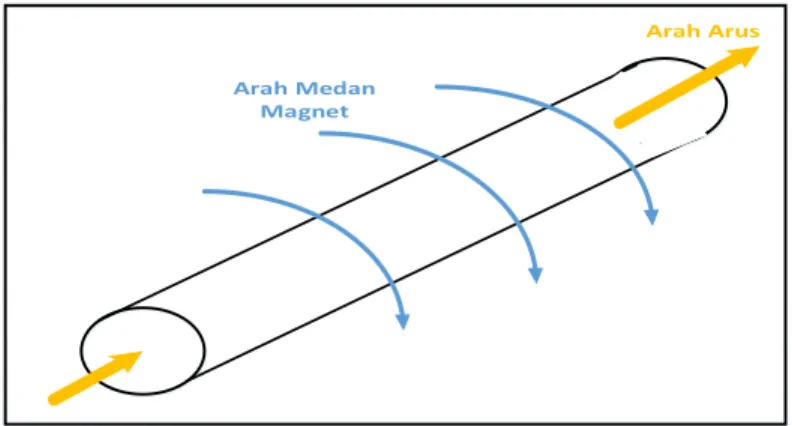
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Prinsip dasar kerja:
Arus lewat pada suatu konduktor, timbul medan magnet di sekitar inductor. Arah medan ditentukan oleh aliran arus
5
Arah Medan Magnet
Arah Arus
Gambar 2.2-1 Arah arus medan magnet
Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub uatara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan medan magnet kutub. Lingkaran bertanda A dan B merupakan ujung konduktor yang dilengkungkan (looped conductor). Arus mengalir masuk melalui ujung A dan keluar melalui ujung B. Medan konduktor A yang searah jarum jam akan menambah medan pada kutub dan
menimbulkan medan yang kuat di bawah konduktor. Konduktor akan berusaha bergerak ke atas untuk keluar dari medan kuat ini. Medan konduktor B yang berlawanan arah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di atas konduktor. Konduktor akan berusaha untuk bergerak turun agar keluar dari medan yang kuat tersebut. Gaya-gaya tersebut akan membuat angker dinamo berputar searah jarum jam.
S
AN
B6
2.2.1
Motor BLDC
BLDC merupakan motor synchronous 3 fasa, bisa dikatan BLDC merupakan perpaduan konsep motor AC dan DC. Dibandingkan dengan motor DC, BLDC memiliki kecepatan lebih tinggi dan memungkin biaya perawatan lebih rendah karna tidak menggunakan brush. Dibandingkan dengan motor Induksi, BLDC memiliki torsi dan efiensi lebih tinggi karena rotor yang terbuat dari magnet permanen.
Secara umum BLDC terdiri dari stator dan rotor. Rotor bagian yang bergerak dan terpasang magnet sedangkan stator bagian yang tidak bergerak yang terdapat kumpuran 3 fasa. motor ini disebut BLDC karena implementasinya menggunakan sumber DC sebagai energinya.
7
2.3
Mikrokontroler
Mikrokontroler adalah Mikro komputer yang dikemas dalam satu chip yang dipadukan didalamnya berupa CPU, Memory, I/O unit dan peripheral lainnya. Fungsi utama dari mikrokontroler adalah mengontrol kerja mesin atau sistem, menggunakan program yang disimpan pada ROM. Dengan penggunaan mikrokontroler maka sistem elektronik bisa menjadi lebih ringkas dikarenakan sebagian besar sistem elektronik bisa digantikan dengan perangkat lunak yang mudah dimodifikasi.
2.3.1
ATMega 16
ATMega 16 adalah salah satu keluarga mikrokontroler 8-bit produk ATMEL yang mengusung arsitektur RISC (Reduced Instruction Set Computing). Pada datasheet[1] , Berikut fitur yang dimilik oleh ATMega16:
- Flash memori 16Kbytes
- Frekuensi kerja maksimum 16 MHz - 512 Bytes EEPROM
- Memiliki 1 USART
- Memiliki 32 programmable I/O - 8-channel , 10-bit ADC
- External and Internal interrupt sources - Tegangan kerja 4,5V - 5,5V
8
2.3.2
ATMega 128
ATMega 128 adalah salah satu keluarga mikrokontroler 8-bit produk ATMEL yang mengusung arsitektur RISC (Reduced Instruction Set Computing). Pada datasheet[2] , Berikut fitur yang dimilik oleh ATMega128:
- Flash memori 16Kbytes
- Frekuensi kerja maksimum 16 MHz - 512 Bytes EEPROM
- Memiliki 2 USART
- Memiliki 53 programmable I/O - 8-channel , 10-bit ADC
- External and Internal interrupt sources - Tegangan kerja 4,5V - 5,5V
9
2.3.3
ATMega 324
ATMega 324 adalah salah satu keluarga mikrokontroler 8-bit produk ATMEL yang mengusung arsitektur RISC (Reduced Instruction Set Computing). Pada datasheet[3] , Berikut fitur yang dimilik oleh ATMega128:
- Flash memori 16Kbytes
- Frekuensi kerja maksimum 20 MHz - Memiliki 2 USART
- Memiliki 32 programmable I/O - 8-channel , 10-bit ADC
- External and Internal interrupt sources - Tegangan kerja 4,5V - 5,5V
10
2.4
Sensor
Sensor merupakan piranti untuk mengkonversi energi yang berasal dari kejadian fisik menjadi arus listrik atau tegangan untuk keperluan pengukuran, kontrol, atau informasi.[4] Sensor dibagi menjadi beberapa macam yaitu: sensor thermal, sensor optik, dan sensor mekanik. Sensor banyak digunakan dalam berbagai macam rangkaian elektronika untuk keperluan mengindera parameter-parameter fisis.
2.4.1
Potensio
Potensio adalah suatu jenis resistor yang nilai resistansinya dapat diatur dengan kebutuhan rangkaian elektronika atau kebutuhan pemakaianya. Secara stuktur potensio terdiri dari 3 kaki terminal dengan sebuah shaft yang berfungsi sebagai pengaturnya. Naik turunnya nilai resistansi sebuah potensiometer disebabkan oleh penyapu (wiper) yang menentukan jalur elemen resistif
Gambar 2.44-1 Bentuk fisik potensio[5]
2.4.2
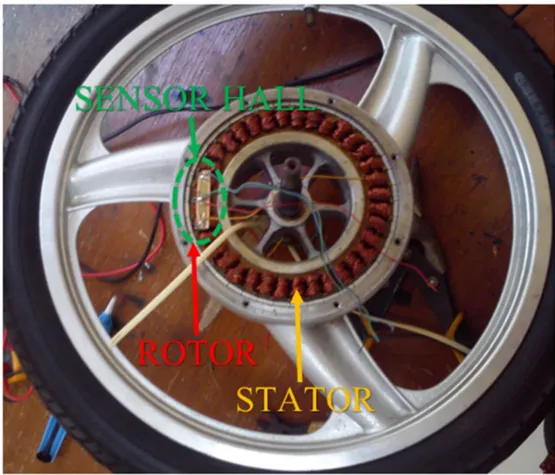
Hall Sensor
Hall sensor adalah sebuah alat yang digunakan untuk mendeteksi kehadiran suatu objek magnetis. Penggunaan sensor hall umumnya digunakan sebagai pengukur kecepatan. Perubahan medan magnet yang terus menerus menyebabkan timbulnya pulsa yang kemudian dapat dihitung frekuensinya.
11
Gambar 2.44-2 Pemakaian Sensor Hall pada BLDC
2.4.3
Encoder
Encoder adalah piranti untuk mengukur gerak dengan output berupa rangkaian pulsa digital. Jenis encoder yang banyak digunakan adalah magnetic encoder dan optical encoder. Magnetic encoder menggunakan sensor efek Hall sebagai detektor magnet. Pada poros dipasangkan sejumlah magnet yang menghasilkan output pulsa dengan jumlah yang sama setiap putaran porosnya. Optical encoder biasanya menggunakan LED inframerah sebagai sumber cahaya, fototransistor atau fotodioda sebagai detektor cahaya serta suatu piringan.[6]
12
2.5
Relay
Relay adalah saklar (switch) elektromagnetis yang dioperasikan dengan cara mengaliri arus listrik pada penghantar sehingga menimbulkan medan magnet untuk menggerakkan kontak saklar yang ada pada relay.
Gambar 2.55-1 Bentuk fisik Relay
2.6
Digital to Analog Converter
Digital to Analog Converter (DAC) merupakan perangkat yang digunakan untuk mengkonversi sinyal digital menjadi sinyal keluaran dalam bentuk analog. Banyak cara yang bisa digunakan untuk konversi sinyal digital menjadi analog salah satunya dengan metode R/2R Ladder, metode ini banyak digunakan dalam ic DAC. R/2R ladder sangat gampang di gunakan karna hanya membutuhkan 2 nilai resistor atau bisa dengan menggunakan 1 nilai resistor.
13
2.7
Kontroler BLDC
Kontroler BLDC berperan sangat penting sebagai penunjang utama dari operasi Motor BLDC. Controller sekaligus inverter berperan sebagai peubah untuk tegangan DC yang masuk pada kontroler menjadi tegangan 3 fasa yang dibutuhkan oleh motor BLDC tersebut untuk berputar.
Gambar 2.77-1 Bentuk fisik kontroler BLDC
2.8
Logika Fuzzy
Logika fuzzy merupakan salah satu komponen pembentuk soft computing. Logika fuzzy pertama kali diperkenalkan oleh Prof. Lotfi A. Zadeh pada tahun 1965. Dasar logika fuzzy adalah teori himpunan fuzzy. Pada teori himpunan fuzzy, peranan derajat keanggotaan sebagai penentu keberadaan elemen dalam suatu himpunan sangatlah penting. Nilai keanggotaan atau derajat keanggotaan atau membership function menjadi ciri utama dari penalaran dengan logika fuzzy tersebut.[10]Ada beberapa alasan digunakannya logika fuzzy, antara lain:
a. Konsep logika fuzzy mudah dimengerti. Karena logika fuzzy menggunakan dasar teori himpunan.
b. Logika fuzzy sangat fleksibel, artinya mampu beradaptasi dengan perubahan-perubahan.
c. Logika fuzzy memiliki toleransi terhadap data yang tidak tepat.
d. Logika fuzzy dapat membangun dan mengaplikasikan pengalaman-pengalaman para pakar secara langsung tanpa harus melalui proses pelatihan.
e. Logika fuzzy dapat bekerjasama dengan teknik-teknik kendali secara konvensional.
![Gambar 2.33-1 Mikrokontroler ATMega16 [1]](https://thumb-ap.123doks.com/thumbv2/123dok/2631898.2247150/8.918.243.653.546.1009/gambar-mikrokontroler-atmega.webp)
![Gambar 2.33-2 Mikrokontroler ATMega128 [2]](https://thumb-ap.123doks.com/thumbv2/123dok/2631898.2247150/9.918.205.659.386.939/gambar-mikrokontroler-atmega.webp)
![Gambar 2.33-2 Mikrokontroler ATMega324 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/2631898.2247150/10.918.210.702.361.919/gambar-mikrokontroler-atmega.webp)
![Gambar 2.44-1 Bentuk fisik potensio [5]](https://thumb-ap.123doks.com/thumbv2/123dok/2631898.2247150/11.918.313.599.491.723/gambar-bentuk-fisik-potensio.webp)
![Gambar 2.44-3 Ilustrasi Optical Encoder [7]](https://thumb-ap.123doks.com/thumbv2/123dok/2631898.2247150/12.918.318.650.116.421/gambar-ilustrasi-optical-encoder.webp)


