7 BAB 2
LANDASAN TEORI
2.1 MATLAB
MATLAB adalah singkatan dari MATRIX LABORATORY, yang biasanya di gunakan dalam :
• Pengembangan Algoritma matematika dan komputasi
• Pemodelan, simulasi, dan pembuatan prototype dari penerimaan data • Analisa, eksplorasi, dan visualisasi data
• Scientific dan engineering
• Pengembangan aplikasi berbasis grafik dan pembuatan Graphical User Interface (GUI)
Software MATLAB memilki pengaplikasian yang berbeda – beda khususnya dalam pengaplikasian yang membutuhkan perhitungan secara matematis.
Penting untuk mengetahui bahwa matlab melakukan seluruh perhitungan matematis dalam bentuk matriks. Semua operasi matematika dalam MATLAB adalah operasi matriks.
MATLAB dapat menunjukkan hasil perhitungan dalam bentuk grafik dan dapat dirancang sesuai keinginan kita menggunakan GUI yang kita buat sendiri.
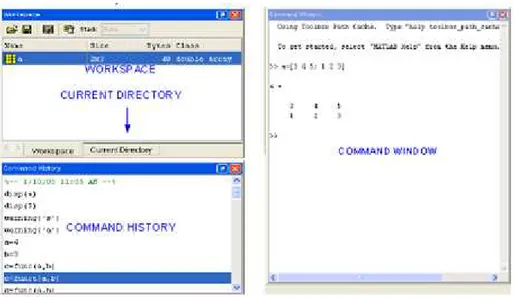
Secara default, MATLAB terdiri dari :
Gambar 2.1 Tampilan awal MATLAB
Command window yang merupakan tempat di mana kita menuliskan fungsi yang kita inginkan. Command history untuk melihat dan menggunakan kembali fungsi–fungsi sebelumnya. Workspace yang berisi variabel yang kita gunakan dan untuk membuat variabel baru dalam MATLAB. Current directory menunjukkan folder- folder yang berisi file MATLAB yang sedang berjalan.
2.2. SIMULINK & SimMechanics
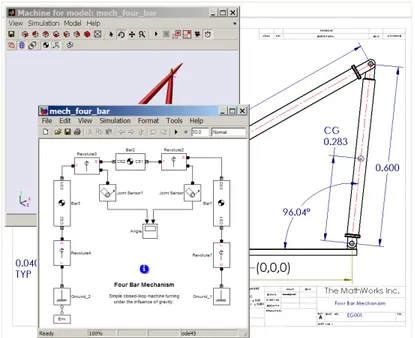
Simulink adalah platform didalam MATLAB yang digunakan untuk mensimulasikan sistem dinamik secara realtime. Didalam simulink terdapat berbagai macam toolbox yang dapat digunakan untuk merangkai sistem dinamik. Toolbox yang kami gunakan adalah toolbox SimMechanics. Toolbox ini berisi part-part yang digunakan untuk mensimulasikan sistem mekanik. Cara penggunaan SimMechanics adalah dengan menghubung-hubungkan
block-blockyang ada sesuai dengan desain mekanik yang diinginkan dan mensimulasikannya dengan parameter tertentu.
Gambar 2.2 Contoh penggunaan SimMechanics
Toolbox ini berisi part-part yang terbagi dalam beberapa blok sebagai berikut: • Machines, Body and Ground.
Blok ini berisi: o Body
Body merepresentasikan Rigid Body didalam sistem. Rigid body dapat diibaratkan sebagai Link yang menghubungkan Joint. Parameter yang terdapat didalam Body adalah koordinat Body dengan relatif terhadap tiga pilihan (World, Adjacent, atau terhadap Port tertentu), posisi Port (Port adalah tempat body berhubungan dengan block lain seperti Joint atau Body Actuator), dan Orientasi sumbu axis Body. Didalam Body terdapat Base dan Follower yang digunakan untuk menentukan arah perhitungan kinematik.
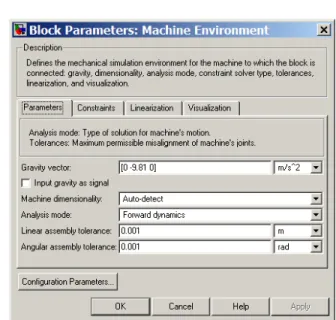
o Machine Environment
Gambar 2.4 Parameter Machine Environment
Digunakan untuk mengatur environment tempat mesin berada, seperti Gravity Vector (pengaruh gravitasi terhadap sistem), Machine dimensionality (digunakan untuk mengatur dimensionality sistem yang disimulasikan), dan Tolerance
(mengatur toleransi yang dapat diaplikasikan kepada joint sebelum terjadi constraint violation)
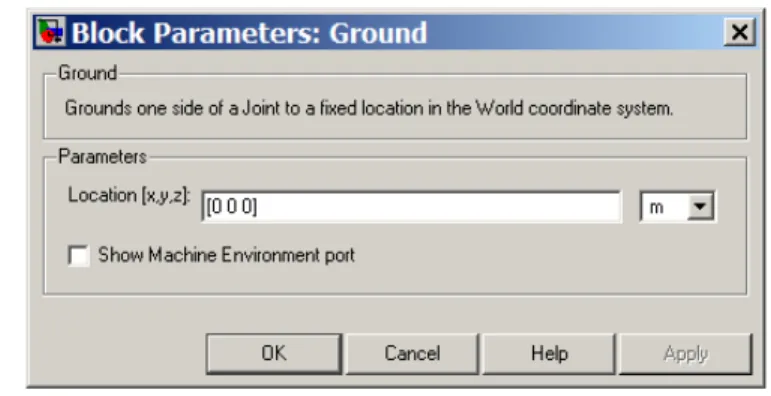
o Ground
Gambar 2.5 Parameter Ground
Digunakan untuk menempelkan joint (umumnya weld) ke koordinat tetap didalam World.
• Joints
Block ini berisi joint-joint yang dapat diaplikasikan untuk memberikan Degree of Freedom (DoF) kepada sistem. Joint-joint ini dihubungkan diantara dua buah Body. Joint dapat digerakkan menggunakan Joint Actuator, Constraint maupun Driver. Parameter yang diperlukan oleh Joint adalah parameter sumbu gerak joint relatif terhadap World.
Joint-joint yang terdapat di blockset ini adalah:
o Bearing (1 translational dan 3 rotational DOF)
o Custom Joint (maksimal 3 translational dan 3 rotational DOF)
o Cylindrical (1 translational dan 1 rotational DOF dengan
masing-masing sumbu paralel)
o Gimbal (3 rotational DOF)
o In-Plane (2 translational DOF)
o Planar (2 translational dan 1 rotational DOF dengan sumbu
masing-masing berada diadalam satu bidang yang sama)
o Prismatic (1 translational DOF)
o Revolute (1 rotational DOF)
o Screw (1 translational dan 1 rotational dengan sumbu masing-masing paralel dan terdapat linear pitch constraint antara
gerakan translational dan rotational)
o Spherical (spherical joint dengan 3 DOF)
o Telescoping (1 translational dan 3 rotational DOF)
o Universal (2 rotational DOF)
o Weld (Digunakan untuk menyambung 2 buah Body) o
• Constraints and Drivers
Block ini berisi Constraint yang dapat diaplikasikan kedalam sistem mekanik. Constraint digunakan untuk membatasi DoF. Constraint yang terdapat didalam block ini adalah:
o Angle Driver
Driver ini menjaga agar axis yang telah ditetapkan pada dua buah body membentuk sudut tertentu.
o Distance Driver
Gambar 2.7 Parameter Distance Driver
Driver ini menjaga dua body agar terpisah oleh jarak tertentu. o Gear Constraint
Gambar 2.8 Parameter Gear Constraint
Driver ini menggerakkan dua buah roational body agar berlaku seperti gear.
o Linear Driver
Gambar 2.9 Parameter Linear Driver
Driver ini mengatur perbedaan vector dua buah body o Parallel Constraint
Gambar 2.10 Parameter Parallel Constraint
Constraint ini menjaga agar dua buah body tetap paralel satu sama lain.
o Point-Curve Constraint
Gambar 2.11 Parameter Point-Curve Constraint
Constraint ini mengatur agar gerakkan sebuah body mengikuti curve body lawannya.
o Velocity Driver
Driver ini mengatur kecepatan linear maupun angular body terhadap body lawannya.
• Actuators and Sensors
Block ini berisi aktuator dan sensor yang dapat diaplikasikan kedalam sistem yang akan dibuat. Aktuator digunakan untu mengerakkan Joint dan Body, sedangkan sensor digunakan untuk memonitor parameter-parameter Joint dan Body. Blok ini berisi aktuator dan sensor sebagai berikut:
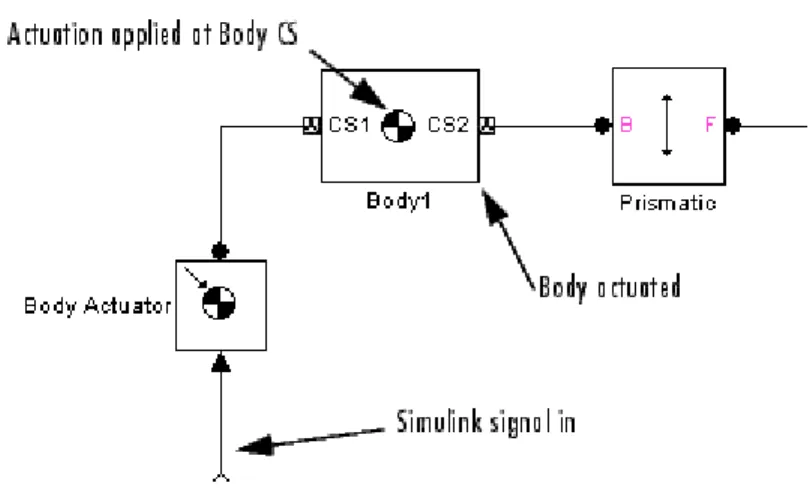
o Body Actuator
Gambar 2.13 Contoh penggunaan Body Actuator
Body actuator digunakan untuk menggerakkan body dengan pilihan output berupa Torque atau Force.
o Body Sensor
Gambar 2.14 Contoh penggunaan Body Sensor
Body sensor digunakan untuk memonitor parameter-parameter Body selama simulasi dijalankan. Parameter yang dapat dimonitor adalah Posisi, Kecepatan, Kecepatan Angular, Matriks Rotasi, Akselerasi, dan Akselerasi Angular.
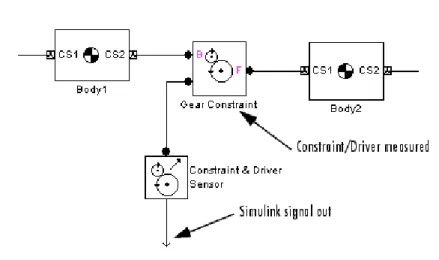
o Constraint & Driver Sensor
Gambar 2.15 Contoh penggunaan Constraint & Driver Sensor Sensor ini digunakan untuk mengukur constrain force atau torque dari dua buah body yang diberikan constrain.
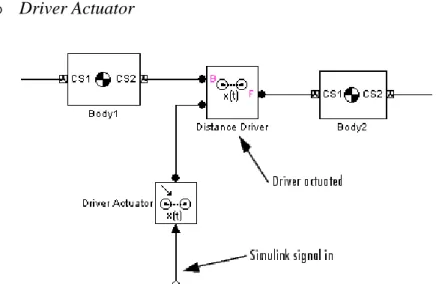
o Driver Actuator
Gambar 2.16 Contoh penggunaan Driver Actuator
Driver actuator menggerakkan Driver yang terpasang pada body. o Joint Actuator
Gambar 2.17 Contoh penggunaan Joint Actuator
Joint actuator digunakan untuk menggerakkan Joint yang terpasang pada body.
o Joint Initial Condition Actuator
Gambar 2.18 Contoh penggunaan Joint Initial Actuator
Joint Initial Condition digunakan untuk memberikan parameter tetap untuk Joint. Joint yang telah digerakkan oleh Joint IC, tidak dapat lagi digerakkan oleh Joint Actuator.
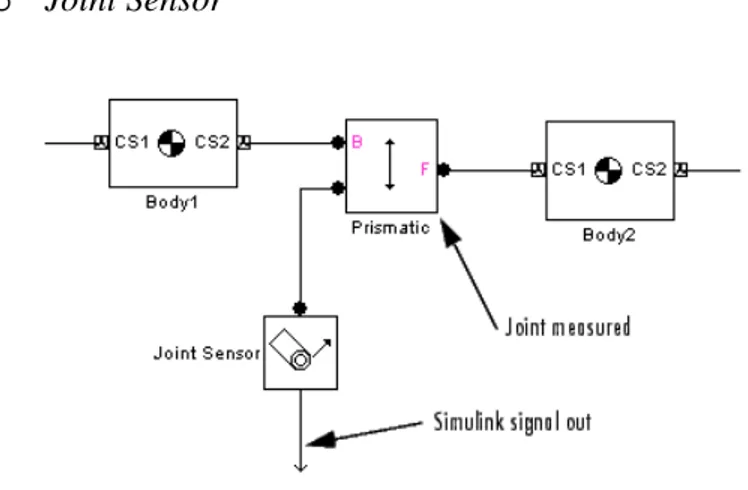
o Joint Sensor
Gambar 2.19 Contoh penggunaan Joint Sensor
Joint Sensor digunakan untuk memonitor parameter Joint. Parameter yang dapat dimonitor tergantung oleh pada Joint apa sensor ini dihubungkan. Untuk Translational Joint, sensor ini memonitor Linear position, Linear Velocity dan Linear acceleration. Untuk Revolute Joint, sensor ini memonitor Sudut, Kecepatan sudut, dan Percepatan sudut. Dan untuk Spherical
Joint, sensor ini memonitor Quaternion, Quaternion first derivative, dan Quaternion second derivative.
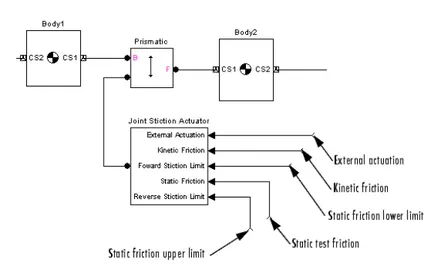
o Joint Stiction Actuator
Gambar 2.20 Contoh penggunaan Joint Stiction Actuator
Joint Stiction Actuator memberikan gesekan Coulomb kinetik dan statik kepada joint prismatik atau revolute.
o Variable Mass & Inertia Actuator
Variable Mass & Inertia Actuator mengaplikasikan berbagai variasi masa dan inersia kepada Body pada titik tertentu sebagai fungsi waktu.
• Force Elements
o Body Spring & Damper o Joint Spring & Damper • Interface Elements
o Prismatic-Translational Interface o Revolute-Rotational Interface
• Utilities
o Continuous Angle
o Mechanical Branching Bar o RotationMatrix2VR
2.3. Autodesk Inventor
Autodesk Inventor merupakan sebuah software yang di gunakan untuk membuat model 3D (tiga dimensi) dari berbagai bentuk model yang diinginkan, baik mesin, bangunan, robot, dan lain – lain.
Gambar 2.21 Tampilan awal Autodesk Inventor 2011
Dalam pembuatan sebuah model 3D, yang pertama-tama harus dilakukan adalah mengidentifikasi komponen-komponen penyusun sistem yang akan dibuat modelnya. Tahap selanjutnya adalah membuat model 3D dari masing-masing komponen penyusun sistem. Selanjutnya seluruh komponen digabung menjadi satu kesatuan menggunakan perintah Constraint.
Perintah Constraint yang terdapat di Autocad Inventor digunakan untuk merangkai komponen-komponen yang telah dibuat sehingga antara komponen terhubung oleh sebuah joint.
Gambar 2.22 Tampilan fitur constraint Fitur constraint terbagi menjadi empat macam, yaitu: • Assembly
Constraint Assembly menghilangkan Degree of Freedom antara dua buah komponen. Terdapat empat tipe constraint, yaitu:
o Mate
Mate digunakan untuk menempelkan dua buah bidang atau point yang terdapat pada dua buah komponen.
o Angle
Angle digunakan untuk membentuk sudut antara dua buah komponen. o Tangent
Constraint Tangent digunakan untuk menempelkan bidang, silinder, spheres, dan kerucut pada point tangency.
o Insert
Constraint Insert adalah kombinasi mate antara dua bidang planar dan mate antara dua axis dari dua buah komponen yang akan digabungkan.
• Motion
Motion Constraint menetapkan pergerakan antara dua buah komponen. Terdapat dua buah tipe constraint Motion, yaitu:
o Rotation
Rotation mendefinisikan salah satu komponen berputar terhadap komponen lawannya dengan rasio tertentu (seperti sebuah gear).
o Rotation-translation
Rotation-translation mendefinisikan salah satu komponen berputar terhadap komponen lawannya yang bergerak translasi dengan rasio tertentu (seperti sebuah worm drive)
• Translational
Sebuah transational constraint merepresentasikan hubungan yang diinginkan antara sebuah permukaan yang silindris dan permukaan yang saling berdekatan pada bagian lainnya, seperti sebuah bubungan dalam celah.
• Constraint Set
Constraint set memungkinkan pengguna untuk memberikan batasan pada dua abuah UCS secara bersamaan.
2.4. 3-DOF Joint for a Novel Hyper-Redundant Robot Arm
Secara umum, robot yang berbentuk lengan atau dapat di sebut juga lengan robot yang terinspirasi dari bentuk belalai gajah, tentakel gurita, atau ular dapat diklasifikasikan sebagai robot continuum atau di sebut juga robot serpentine. Robot continuum di bangun oleh barisan yang menyerupai tulang belakang tanpa persendian seperti yang ada pada lengan. Karena hal tersebut, maka dapat di kategorikan sebagai invertebrata dengan struktur multi-section. Robot serpentine dan hyper-redundant robot memiliki jumlah joint diskrit yang cukup banyak, namun dapat membentuk mekanisme pergerakan yang lebih halus dibandingkan dengan robot berkaki biasa. Berikut ini adalah gambar model robot 3-DOF dengan multi joint.
Gambar 2.23 Model CAD robot yang terdapat di [5]
Bentuk robot di atas merupakan bentuk lengan robot yang di kembangkan oleh Franhoufer IFF yang dapat di klasifikasikan sebagai hyper-redundant karena merupakan penggabungan dari beberapa joint yang terhubung dengan elemen– elemen yang kaku, di mana setiap joint memiliki 3 derajat kebebasan (3-DOF). Setiap joint yang ada mampu melakukan gerak berputar (rotasi) terhadap dua sumbu (roll dan pitch) dan gerak translasi sepanjang salah satu sumbu seperti layaknya pada sendi prismatic. Karena ketiga sumbu tersebut dapat bergerak secara ortogonal, maka diilustrasikan sebagai sebuah Multi-Joint.
Keseluruhan tiga jenis gerakan yang telah disebutkan di atas dipicu atau digerakkan oleh folding linkage yang disusun diantara dua buah plate secara simetris.Masing–masing folding linkage terhubung dengan upper dan lower plate yang disangga menggunakan sebuah 1-DOF revolute joint sederhana, dan dihubungkan oleh sebuah spherical joint.