38
BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan dijelaskan tentang pengujian dimensi robot, algoritma dari robot yang telah dibuat dan analisis mengenai kinerja dari algoritma tersebut.
4.1. Pengujian Dimensi Mekanik
Pengujian dimensi mekanik dilakukan untuk mengetahui panjang, lebar, dan tinggi dari robot. Hal ini sangat penting karena dalam aturan pertandingan KRPAI dimensi maksimum robot beroda, yaitu 31×31×27 cm (panjang×lebar×tinggi). Dalam pengujian ini menggunakan alat ukur penggaris standar. Dari hasil pengukuran didapatkan panjang robot adalah 24 cm, lebar robot 21 cm dan tinggi robot 26,5 cm. Gambar 4.1 menunjukan pengujian dimensi robot:
39 4.2. Pengujian Algoritma
Pengujian algoritma bertujuan untuk mengukur tingkat keberhasilan robot dalam menemukan serta mengangkat baby cradle, dan kemudian meletakannya di safe zone. Algortima robot dibagi menjadi dua bagian yaitu algoritma pencarian baby cradle dan algoritma pencarian targetsecondary save zone.
Pengujian algoritma pertama dilakukan pada setiap kemungkinan letak baby
cradle di tiap ruang pada area B. Ada 2 kemungkinan letak baby cradle untuk tiap
ruang seperti pemaparan pada metode pengujian pada BAB III. Algoritma ini akan diuji sebanyak 5 kali untuk setiap letak, sehingga untuk algoritma pertama akan dilakukan 40 kali pengujian robot dalam menemukan dan mengangkat baby cradle. Pengujian algoritma kedua dilakukan pada setiap kemungkinan letak target secondary safe zone. Total ada 11 target dan untuk setiap target akan dilakukan 5 kali pengujian sehingga total akan dilakukan 55 kali pengujian.
Data-data seperti keberhasilan robot dalam menemukan baby cradle (A) dan mengangkat baby cradle (B) serta meletakan baby cradle di safe zone dari setiap pengujian akan dimuat dalam sebuah tabel pengujian. Pada tabel pengujian tanda () berarti “BERHASIL”, Sedangkan, tanda (-) berarti “GAGAL”.
40
1. Pengujian Menemukan Serta Mengangkat Baby Cradle
Pengujian ini dilakukan pada tanggal 26 April 2016 dan 16 Juni 2016. Hasil pengujian ini ditunjukkan pada tabel 4.1.
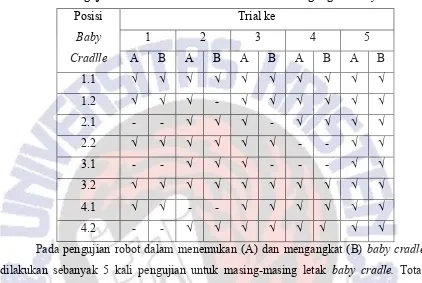
Tabel 4.1. Pengujian Robot dalam Menemukan serta Mengangkat Baby Cradle Posisi
Pada pengujian robot dalam menemukan (A) dan mengangkat (B) baby cradle dilakukan sebanyak 5 kali pengujian untuk masing-masing letak baby cradle. Total dilakukan 40 kali pengujian menemukan bayi dan 40 kali pengujian dalam mengangkat keranjang bayi. Dalam menemukan bayi robot berhasil sebanyak 34 kali yang berarti presentase keberhasilan adalah 85%, sedangkan dalam mengangkat robot berhasil sebanyak 31 kali sehingga presentase keberhasilan 77,5%.
Robot mengalami 6 kali kesalahan dalam menemukan boneka bayi. Kesalahan pembacaan terjadi karena robot salah membaca pantulan led sebagai tanda sebenarnya. Selain itu terkadang kamera kehilangan led ketika sudah akan mendekati baby cradle sehingga robot menabrak baby cradle. Kesalahan pembacaan dari kompas dan sensor garis juga berperan, karena jika ada kesalahan pembacaan maka bisa berakibat robot gagal menemukan baby cradle. Ketika robot gagal menemukan baby cradle maka robot juga akan gagal mengangkat baby cradle.
41
mengangkat baby cradle ketika terjadi kegagalan dalam menemukan led penanda baby cradle.
2. Pengujian Meletakan Baby Cradle di Secondary safe zone
Pengujian ini dilakukan pada tanggal 26 April 2016. Hasil pengujian ini ditunjukkan pada tabel 4.2.
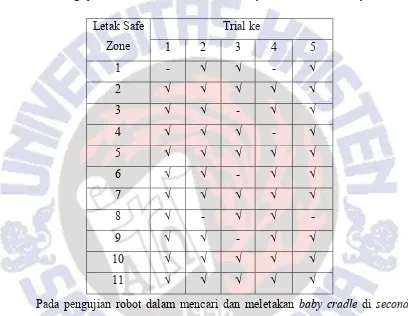
Tabel 4.2. Pengujian Robot dalam Meletakan Baby Cradle di Secondary Save Zone.
Pada pengujian robot dalam mencari dan meletakan baby cradle di secondary
safe zone dilakukan sebanyak 5 kali perulangan untuk satu posisi targetsafe zone. Total
pengujian yang dilakukan adalah 55 kali pengujian dan berhasil sebanyak 47 kali, sehingga presentase keberhasilan robot dalam meletakan baby cradle adalah 85,45%.
Robot mengalami kegagalan dalam meletakan baby cradle di secondary safe zone sebanyak 8 kali. Kegagalan tersebut disebabkan karena ujung lengan penjepit yang tersangkut pada baby cradle sehingga ketika robot akan menurunkan baby cradle ke seberang dinding baby cradle tidak terjatuh dan dianggap gagal. Selain itu, robot juga terkadang membaca target safe zone pada posisi yang kurang tepat sehingga ketika