BAB II. LANDASAN TEORI
2.1 Arduino
Arduino adalah kit elektronik atau papan rangkaian elektronik open source
yang didalamnya terdapat komponen utama, yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel (Syahwil, 2013). Mikrokontroler itu sendiri adalah chip atau IC (integrated circuit) yang bisa diprogram menggunakan komputer. Tujuan memprogram mikrokontroler adalah agar rangkaian elekronika dapat membaca input, memproses input tersebut, dan kemudian menghasilkan
output sesuai yang diinginkan. Jadi mikrokontroler bertugas sebagai otak yang mengendalikan input, proses, dan output pada sebuah rangkaian elektronik. Secara umum, Arduino terdiri dari dua bagian, yaitu hardware dan software.
Hardware merupakan berupa papan input/output yang open source. Sedangkan
software berupa Software Arduino yang juga open source, meliputi software IDE untuk menulis program dan driver untuk koneksi dengan komputer (Suhata, 2005). Kelebihan dari Arduino dari platform lain yaitu:
1. Murah, Arduino biasanya dijual relatif murah dibandingkan dengan platform
mikrokontroler lainya.
2. Sederhana dan mudah pemrogramannya. Perlu diketahui bahwa lingkungan pemrograman di Arduino mudah digunakan dan cukup fleksibel.
3. Perangkat lunaknya open source. Perangkat lunak Arduino IDE dipublikasikan sebagai open source.
4. Perangkat kerasnya open source. Perangkat kerasnya dipublikasikan open source. Perangkat keras Arduino berbasis mikrokontroler ATMEGA168, ATMEGA328, dan ATMEGA1280.
5. Tidak perlu perangkat chip programmer. Karena di dalamnya sudah ada
bootloader yang akan menangani upload program dari komputer.
6. Sudah memiliki komunikasi USB. Sehingga perangkat Laptop yang tidak memiliki port serial/RS323 bisa menggunakannya.
7. Bahasa pemrograman relatif mudah. Karena software Arduino dilengkapi dengan kumpulan library yang cukup lengkap.
8. Memiliki modul siap pakai (shield) yang bisa ditancapkan pada board Arduino. Misalnya Shield GPS, Ethernet, SD Card, dll.
2.1.1 Arduino Mega 2560
Mega 2560 adalah papan mikrokontroler berdasarkan ATmega2560. Ini memiliki 54 digital pin input / output (yang 15 dapat digunakan sebagai output PWM), 16 analog input, 4 UART (hardware port serial), 16 MHz osilator kristal, koneksi USB,jack listrik, header ICSP, dan tombol reset. Ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau kekuasaan itu dengan adaptor AC-DC atau baterai untuk memulai. (MEGA, ARDUINO, n.d.)
Arduino Mega 2560 adalah board Arduino yang merupakan perbaikan dari board Arduino Mega sebelumnya. Arduino Mega awalnya memakai chip
ATmega1280 dan kemudian di ganti dengan chip ATmega 2560, oleh karena itu namanya di ganti menjadi Arduino Mega 2560.
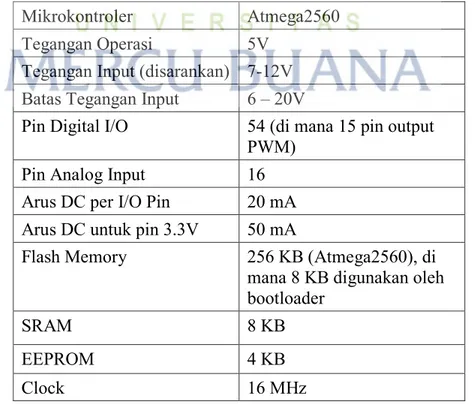
Tabel 2.1 Spesifikasi Board Arduino Mega
Mikrokontroler Atmega2560
Tegangan Operasi 5V
Tegangan Input (disarankan) 7-12V Batas Tegangan Input 6 – 20V
Pin Digital I/O 54 (di mana 15 pin output PWM)
Pin Analog Input 16
Arus DC per I/O Pin 20 mA
Arus DC untuk pin 3.3V 50 mA
Flash Memory 256 KB (Atmega2560), di
mana 8 KB digunakan oleh bootloader
SRAM 8 KB
EEPROM 4 KB
2.1.1.1 Catu Daya
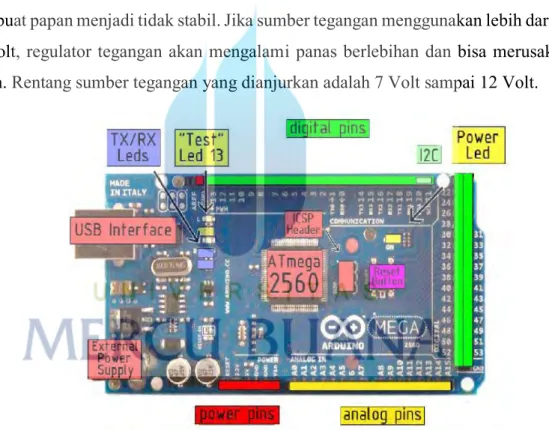
Arduino Mega dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Sumber daya eksternal (non-USB) dapat berasal baik dari adaptor AC-DC atau baterai. Adaptor dapat dihubungkan dengan mencolokkan steker 2,1 mm yang bagian tengahnya terminal positif ke jack sumber tegangan pada papan. Jika tegangan berasal dari baterai dapat langsung dihubungkan melalui header pin Gnd dan pin Vin dari konektor POWER. Papan Arduino ATmega 2560 dapat beroperasi dengan pasokan daya eksternal 6 Volt sampai 20 volt. Jika diberi tegangan kurang dari 7 Volt, maka, pin 5 Volt mungkin akan menghasilkan tegangan kurang dari 5 Volt dan ini akan membuat papan menjadi tidak stabil. Jika sumber tegangan menggunakan lebih dari 12 Volt, regulator tegangan akan mengalami panas berlebihan dan bisa merusak papan. Rentang sumber tegangan yang dianjurkan adalah 7 Volt sampai 12 Volt.
Gambar 2.1 Board Arduino Mega2560
Adapun pin power suplai pada Arduino Mega 2560 adalah:
• VIN. Tegangan input board Arduino ketika menggunakan sumber
daya (5 volts dari sambungan USB atau dari sumber regulator lain). Anda dapat mensuplai tegangan pada pin ini, jika suplai tegangan lewat power jack, dapat mengakses melalui pin ini.
• 5V. Keluaran Pin ini telah diatur sebesar 5V dari regulator pada
board. Board dapat disuplai melalui DC jack power (7-12V), konektor USB (5V), atau pin VIN (7-12V). Menyuplai tegangan melalui pin 5V atau 3,3V bypass regulator, dapat merusak board.
• 3v3. Suplai 3,3 volt dihasilkan oleh regulator pada board.
Menarik arus maksimum 50mA.
• GND. Pin Ground.
• IOREF pin pada papan Arduino berfungsi untuk memberikan
referensi tegangan yang beroperasi pada mikrokontroler. Sebuah prisai yang di konfigurasi dengan benar untuk membaca pin dengan IOREF dan memilih sumberdaya yang tepat atau mengaktifkan penerjemah tegangan pada output untuk bekerja pada tegangan 5 volt atau 3,3 volt.
2.1.1.2 Memory
ATMEGA2560 mempunyai memori 256 KB (dengan 8 KB digunakan untuk bootloader), juga mempunyai 8 KB SRAM dan 4 KB EEPROM (yang mana dapat dibaca tulis dengan library EEPROM).
2.1.1.3 Input dan Output
Seperti yang telah disebutkan sebelumnya, Arduino Mega 2560 memiliki 54 buah digital pin yang dapat digunakan sebagai input atau output, dengan menggunakan fungsi pinMode(), digitalWrite(), dan digital(Read). Pin-pin tersebut bekerja pada tegangan 5V, dan setiap pin dapat menyediakan atau menerima arus 20mA, dan memiliki tahanan pull-up sekitar 20-50k ohm (secara default dalam posisi disconnect). Nilai maksimum adalah 40mA, yang sebisa mungkin dihindari untuk menghindari kerusakan chip mikrokontroler
Beberapa pin memiliki fungsi khusus :
• Serial yang di gunakan untuk menerima (RX) dan mengirimkan (TX) data serial TTL.
• External Interrups, yaitu pin yang dapat dikonfigurasi untuk memicu sebuah intrupsi pada nilai yang rendah, meningkat atau menurun, atau berubah nilai.
• SPI : Pin ini mendukung komunikasi SPI menggunakan SPI library. Pin SPI juga terhubung dengan header ICSP, yang secara fisik kompatibel dengan Arduino, Arduino Duemilanove dan Arduino Diecimila.
• LED : Pin 13. Pada pin 13 terhubung built-in led yang dikendalikan oleh digital pin no 13. (Syahwil, 2013)
• TWI : Pin 20 (SDA) dan pin 21 (SCL). Yang mendukung komunikasi TWI menggunakan Wirelibrary. Perhatikan bahwa pin ini tidak di lokasi yang sama dengan pin TWI pada Arduino Duemilanove atau Arduino Diecimila.
Arduino Mega 2560 memiliki 16 pin sebagai analog input, yang masing-masing menyediakan resolusi 10 bit (yaitu 1024 nilai yang berbeda). Secara default pin ini dapat diukur/diatur dari mulai Ground sampai dengan 5 Volt, juga memungkinkan untuk mengubah titik jangkauan tertinggi atau terendah mereka menggunakan pin AREF dan fungsi AnalogReference().
Ada beberapa pin lainnya yang tersedia, antara lain:
• AREF: Referensi tegangan untuk input Digunakan dengan fungsi AnalogReference().
• RESET: Jalur LOW ini digunakan untuk me-reset (menghidupkan ulang) microcontroller. Jalur ini biasanya digunakan untuk menambahkan tombol reset pada shield yang menghalangi papan utama Arduino.
2.2 Sinyal Analog dan Digital
2.2.1 Sinyal Analog
Menurut Stoneytiti, sinyal adalah kuantitas terukur yang rentang waktunya atau spasial yang bervariasi. Sebuah sinyal dapat dinyatakan sebagai fungsi dari waktu dan frekuensi.
Sinyal Analog bekerja dengan mentransmisikan suara dan gambar dalam bentuk gelombang kontinu (continus varying). Dua parameter/karakteristik terpenting yang dimiliki oleh isyarat analog adalah amplitudo dan frekuensi. Isyarat analog di nyatakan dengan gelombang sinus karena gelombang adalah dasar untuk semua bentuk isyarat analog. Berdasarkan analisis fourier, suatu sinyal analog
dapat diperoleh dari perpaduan sejumlah gelombng sinus. Dengan menggunakan sinyal analog, maka jangkuan transmisi data dapat mencapai jarak yang jauh, tetapi sinyal ini mudah terpengaruh oleh noise. Salah satu contoh sinyal analog adalah Suara. Gelombang pada sinyal analog mempunyai tiga variabel dasar yaitu:
• Amplitudo yang merupakan ukuran tinggi rendahnya tegangan dari sinyal analog
• Frekuensi adalah jumlah gelombang sinyal analog dalam satuan detik
• Phasa adalah besar sudut dari sinyal analog pada saat tertentu.
2.2.2 Sinyal Digital
Merupakan hasil dari perubahan sinyal analog menjadi kombinasi urutan bilangan 0 dan 1 (juga biner), sehingga tidak mudah terpengaruh oleh gangguan dearu, tetapi transmisi sinyal digital hanya mencapai jarak jangkau yang relatif dekat. Dapat di sebut juga sinyal diskret. Sinyal yang mempunyai dua keadaan ini disebut dengan bit. Bit dapat berupa nol (0) atau satu (1). Kemungkinan nilai untuk sebuat bit adalah 2 buah (21). Kemungkinan nilai untuk 2 bit adalah sebanyak 4(22),
berupa 00,01,10, dan 11. Jadi secara umum nilai yang terbentuk oleh kombinasi n bit adalah sebesar 2n buah (Pires, 2005).
Gambar 2.2 Sinyal Analog dan Sinyal Digital 2.2.3 Penyajian Data Digital
Pada laporan penelitian ini bagian hasil penelitian terdapat bahasan mengenai data digital. Data digital adalah tranmisi dari data analog menjadi data digital (data analog yang dikonversi menjadi angka). Data digital di peroleh melalui modul sensor yang terus hidup tidaklah selalu sama karena data analog yang di konversi menjadi angka atau data digital terus mengalami perubahan yang di sebabkan oleh frekuensi yang terus berjalan, berarti data yang terus berjalan menandakan bahwa sensor telah bekerja.
Data yang diperoleh dari sensor tersebut di gunakan sebagai tolak ukur pengujian sensor tersebut. data yang telah di uji coba yang sebelumnya tidak beraturan dan sulit dibaca, agar tersusun dalam bentuk yang teratur dan mudah dibaca maka di buat tabel pengujian data digital. Dengan demikian, pengujian data atau penyusunan data menjadi lebih teratur sehingga mudah dibaca, dipahami dan dianalisis.
2.3 Motor Servo
Motor Dc seringkali disebut juga sebagai motor servo walau dalam realitanya berbeda dengan motor DC (Budiharto, 2010). Motor servo merupakan motor DC yang mempunyai kualitas tinggi, sudah dilengkapi dengan sistem kontrol di dalamnya. Dalam aplikasi motor servo sering digunakan sebagai kontrol loop tertutup untuk menangani perubahan posisi secara tepat dan akurat.
Gambar 2.3 Model Fisik Motor Servo
Bentuk fisik dari motor servo dapat dilihat pada Gambar 2.3, sistem pengkabelan motor servo terdiri dari 3 bagian, yaitu Vec, Gnd, dan Kontrol (PWM). Penggunaan PWM pada motor servo berbeda dengan penggunaan PWM pada motor DC. Pada motor servo, pemberian nilai PWM akan membuat motor servo bergerak pada posisi tertentu dan kemudian berhenti (kontrol posisi). Pengaturannya dapat dilakukan dengan menggunakan delay pada setiap perpindahan posisi awal menuju posisi akhir.
2.3.1 Motor Servo Standar 180o
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing – masing sudut mencapai 90o sehingga total defleksi sudut
2.3.2 Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
Kebanyakan motor servo digunakan sebagai:
• Manipulators. • Moving camera’s. • Robot Arms
2.4 Sensor Jarak IR SHARP
Sensor jarak Sharp pilihan populer untuk banyak proyek yang membutuhkan pengukuran jarak akurat (Ramadhan, 2010). Sensor IR ini lebih ekonomis dari pada pengukur jarak sonar, namun memberikan kinerja yang jauh lebih baik dari pada alternatif lain IR. Interfacing ke mikrokontroler yang paling mudah adalah output analog tunggal dapat dihubungkan ke sebuah konverter analog-ke-digital untuk melakukan pengukuran jarak, atau output dapat dihubungkan ke komparator untuk deteksi ambang batas. Jangkauan deteksi versi ini adalah sekitar 10 cm sampai 80 cm (4 "sampai 32") plot jarak terhadap tegangan
output ditunjukkan di bawah ini. Sensor ini termasuk pada sensor jarak kategori optik. Pada dasarnya, sensor ini sama seperti sensor Infra Red (IR) konvensional, GP2Y0A21 memiliki bagian transmitter/emitter dan receiver (detektor). Bagian
transmitter akan memancarkan sinyal IR, sedangkan pantulan dari IR (apabila mengenai sebuah objek) akan ditangkap oleh bagian detektor yang terdiri dari lensa pem-fokus dan sebuah linear CCD array. Linier CCD array terdiri atas sederetan elemen peka cahaya yang disebut piksel (picture element).
2.4.1 Pin Out Sensor IR SHARP
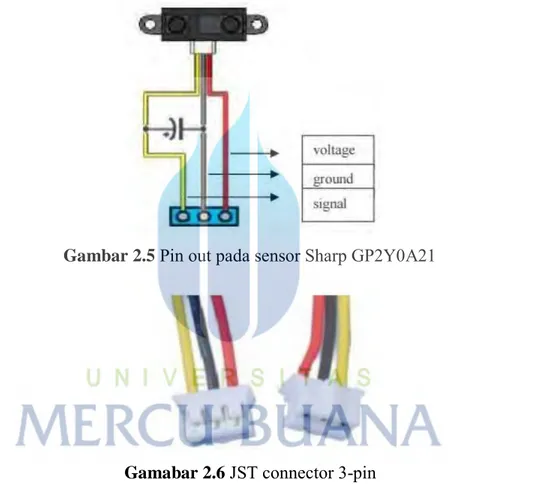
Sensor ini memiliki 3-pin, Voltage, Ground, Signal. Output sensor ini adalah analog tunggal, dapat terhubung ke sebuah konverter analog ke-digital untuk mengambil pengukuran jarak, atau output dapat dihubungkan ke comparator untuk deteksi ambang batas. Untuk menghubungkan sensor ke mikrokontroler, sensor Sharp GP2Y0A21 menggunakan konektor JST 3-pin yang terhubung ke kabel 3-in JST untuk sensor jarak itu sendiri.
Gambar 2.5 Pin out pada sensor Sharp GP2Y0A21
Gamabar 2.6 JST connector 3-pin 2.4.2 Prinsip Kerja Sensor IR SHARP
Bila dibandingkan dengan sensor jarak ultrasonik, dimana dapat mengatasi tipuan-tipuan dalam bentuk cermin, namun sensor ini memiliki kelemahan apabila obyek yang dideteksi berupa dinding yang bergelombang di mana sinyal sonar akan dipantulkan ke arah lain sehingga jarak tidak terdeteksi. Untuk mengatasi hal ini, sensor inframerah sebagai pendukung sistem pengukuran jarak adalah alternatif yang baik. Berbeda dengan sensor ultrasonik, sensor inframerah tidak menghitung waktu pancaran sinar melainkan menghitung di bagian mana sinar inframerah yang
dikembalikan diterima oleh rangkaian phototransistor. Semakin jauh jarak maka semakin ke kanan sinar inframerah yang diterima pada rangkaian phototransistor dan semakin kecil tegangan outputnya. Hasil output ini akan diterima oleh adc terlebih dahulu sebelum diambil oleh mikrokontroler.
2.5 Sensor Timbangan / Load Cell
Load Cell adalah transduser (transducer, komponen elektronika yang dapat mengukur besaran fisik menjadi sinyal elektris) yang dapat mengubah tekanan oleh beban menjadi signal elektrik. Konversi terjadi secara tidak langsung dalam dua tahap. Lewat pengaturan mekanis, gaya tekan dideteksi berdasarkan deformasi dari matriks pengukur regangan (strain gauges) dalam bentuk resistor planar. Regangan ini mengubah hambatan efektif (effective resistance). (Timbangan Indonesia, 2013) Pengukuran massa biasanya dilakukan secara manual yaitu dengan menggunakan timbangan manual. Devinisi Timbangan itu sendiri adalah sebuah alat bantu yang digunakan untuk mengetahui berat suatu benda, dalam pemanfaatannya timbangan digunakan diberbagai bidang salah satunya dibidang perdagangan, seperti halnya pedagang buah dipasar yang kebanyakan masih menggunakan timbangan manual. Berdasarkan dari penjelasan diatas maka dilakukanlah pengembangan, suatu alat timbangan elektronik menggunakan mikrokontroler Arduino mega sebagai pengendali.
Alat ini dirancang untuk menimbang berat sampah secara otomatis. Alat ini menggunakan satu buah sensor yaitu load cell Sensor dengan modul Hx711 Dual Chanel Weighing Sensor, dirancang khusus untuk penggunaan pada sensor berat diletakkan ditengah agar alat dapat menimbang secara baik. Pada saat alat mendeteksi adanya beban, maka secara otomatis sensor akan membaca dan mengirimkan sinyal ke mikrokontroler, kemudian berat sampah tersebut ditampilkan oleh halaman antar muka E-dump.
2.6 Ethernet Shield
Ethernet Shield berfungsi untuk menghubungkan rangkaian Arduino ke dalam jaringan internet dalam hitungan menit. Dengan menggunakan kabel RJ45 sebagai penghubung dan mengikuti sedikit intruksi sederhana, Arduino sudah dapat dikendalikan melalui jaringan internet. Hal ini karena adanya chip Ethernet Wiznet
W5100 yang di tambahkan pada rangkaian tersebut. Selain itu Ethernet Shield juga didukung dengan slot MicroSD yang dapat digunakan untuk menyimpan berkas pengaturan jaringan. (K. Curran, 2011)
Modul ini menyediakan koneksi sampai empat socket secara simultan. Ethernet Shield berkomunikasi dengan Arduino melalui SPI (Serial Peripheral Interface) bus pada digital pin 10, 11, 12, dan 13. Penggunaan Ethernet shield ini memanfaatkan Ethernet library untuk menuliskan kode programnya dimana kode tersebut untuk koneksi ke jaringan internet.
Pada shield ini terdapat beberapa LED untuk:
• PWR : Untuk indikasi bahwa shield telah mendapat daya listrik.
• LINK : Menandakan adanya proses pengiriman dan penerimaan data.
• FULLD : Menandakan bahwa koneksi jaringan dalam keadaan full duplex.
• 100M : Menandakan adanya jaringan yang mempunyai kecepatan 100 Mb/s.
• RX : LED ini menyala ketika ada data yang masuk.
• TX : LED ini menyala ketika ada data yang terkirim keluar.
• COLL : LED ini menyala ketika terjadinya bentrok jaringan.
Jumper solder yang bertanda “INT” bisa dikoneksikan untuk Arduino agar bisa menerima notifikasi dari W5100, tetapi ini tidak tersedia dalam Ethernet library. Jumper tersebut mengkoneksikan pin INT pada W5100 ke pin digital nomor 2 pada Arduino.
2.7 Arduino IDE
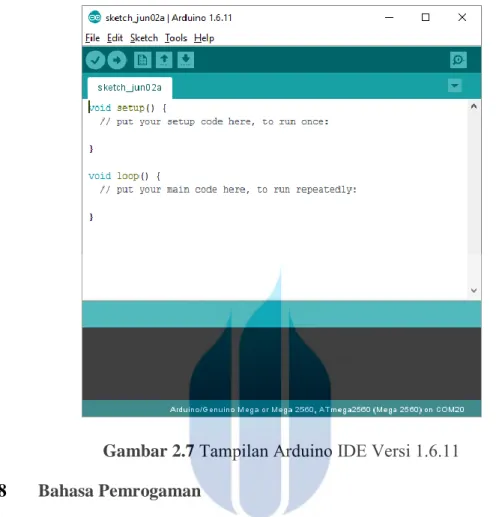
Arduino IDE adalah software yang disediakan di situs Arduino.cc yang ditujukan sebagai perangkat pengembangan sketch yang digunakan sebagai program di papan Arduino (Kadir, 2015). IDE (Integrated Development Environment) berarti bentuk alat pengembangan program yang terintegrasi sehingga berbagai keperluan disediakan dan dinyatakan dalam bentuk antarmuka berbasis menu. Arduino IDE dapat digunakan untuk menulis sketch, memeriksa ada
kesalahan atau tidak di sketch, dan kemudian mengunggah sketch yang sudah terkompilasi ke papan Arduino. Bisa dilihat di Gambar 2.7
Gambar 2.7 Tampilan Arduino IDE Versi 1.6.11 2.8 Bahasa Pemrogaman
Bahasa pemrograman adalah sebuah instruksi standar untuk memerintah komputer agar mempunyai fungsi tertentu. Bahasa ini memungkinkan seorang programmer dapat menentukan secara persis data mana yang akan diolah oleh komputer, bagaimana data ini akan disimpan atau diteruskan, dan jenis langkah apa secara persis yang akan diambil dalam berbagai situasi.
2.8.1 Bahasa Perograman C
Bahasa C merupakan hasil pengembangan dari bahasa B yang ditulis oleh Ken Thompson pada tahun 1970. Bahasa C untuk pertama kali ditulis oleh Brian W. Kernighan dan Denies M. Ritchie pada tahun 1972. Bahasa C pada awalnya dioperasikan di atas sistem operasi UNIX.
Bahasa C merupakan bahasa pemrograman tingkat menengah, yang berada di antara bahasa tingkat rendah dan bahasa tingkat tinggi yang biasa disebut dengan
Bahasa Assambly. Bahasa C mempunyai banyak kemampuan, di antaranya untuk membuat perangkat lunak, misalnya dBASE, Word Star, dan lain – lain.
2.8.2 Bahasa Pemrogaman HTML
HTML (Hyper Text Markup Language) adalah sekumpulan simbol-simbol atau tagtag yang dituliskan dalam sebuah file yang digunakan untuk menampilkan halaman pada browser. Tag-tag HTML selalu diawali dengan <x> dan diakhiri dengan </x> dimana x tag HTML itu seperti b, i, u dll. Setiap dokumen HTML harus diawali dan ditutup dengan tag HTML <HTML></HTML>. Tag HTML memberi tahu browser bahwa yang ada di dalam kedua tag tersebut adalah dokumen HTML. Bagian Header dari dokumen HTML diapit dengan tag <HEAD></HEAD> didalam bagian ini bisanya untuk tag Title yang menampilkan judul halaman pada titlenya browser. Bagian Body dari dokumen HTML diapit dengan <BODY></BODY>. Dokumen body digunakan untuk menampilkan text,
image link, dan semua yang akan ditampilkan pada halaman antar muka E-dump. Program yang digunakan untuk membuat document HTML menggunakan HTML editor. Ada banyak HTML editor yang bisa digunakan, diantaranya: Notepad, Ms. FrontPage, dan Dreamweaver.
2.9 Flowchart
Flowchart adalah bagan - bagan yang mempunyai arus yang menggambarkan langkah- langkah penyelesaian suatu masalah. Bagan alirprogram (program flowchart) adalah suatu bagan yang menggambarkan aruslogika dari data yangkan diproses dalam suatu program dari awal sampai akhri. Bagan alir terdiri dari simbol-simbol yang mewakili fungsi-fungsi langkah program dan garis alir (flowlines) menujukan urutan dari simbol-simbol yangakan dikerjakan.Flowchart dalam Bahasa Indonesia diterjemahkan sebagai Diagram Alir. Dari dua kata ini, maka dapat kita bayangkan bahwa flowchart itu berbentukdiagram yang bentuknya dapat mengalirkan sesuatu. Hal ini memang benar,flowchart memang melukiskan suatu aliran kegiatan dari awal hingga akhirmengenai suatu langkah-langkah dalam penyelesaian suatu masalah. Masalah tersebut bisa bermacam-macam, mulai dari masalah yang sederhana sampai yang kompleks. Masalah yang kita pelajari tentu saja masalah pemrograman dengan menggunakan komputer, tetapi secara logika
dapat kita awali dengan mengamatipermasalahan dalam kehidupan sehari-hari kita. Contoh sederhananya adalah masalah membuat secangkir kopi. Dalam membuat secangkir kopi, tentu saja diperlukan langkah-langkah yang berurutanagar hasilnya dapat sesuai dengan apa yang kita inginkan, yaitu secangkir kopi.Demikian halnya dalam memprogram, diperlukan suatu algoritma (urutan langkah-langkah logis penyelesaian masalah yang disusun secara sistematis) agarprogram yang kita buat dapat berjalan dan memberikan hasil yang valid. Nah, untuk merepresentasikan algoritma itulah kita gunakan flowchart.
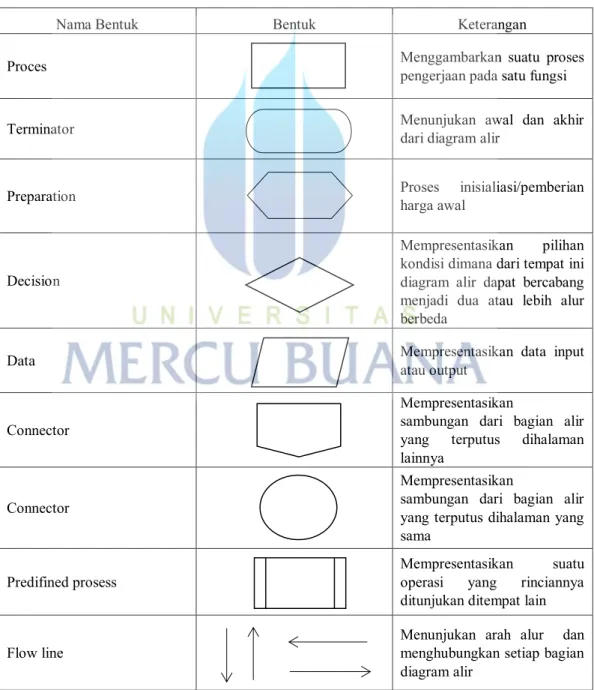
Tabel 2.2 Diagram Flowchart
Nama Bentuk Bentuk Keterangan
Proces Menggambarkan suatu proses pengerjaan pada satu fungsi
Terminator Menunjukan awal dan akhir dari diagram alir
Preparation Proses inisialiasi/pemberian harga awal
Decision
Mempresentasikan pilihan kondisi dimana dari tempat ini diagram alir dapat bercabang menjadi dua atau lebih alur berbeda
Data Mempresentasikan data input atau output
Connector
Mempresentasikan
sambungan dari bagian alir yang terputus dihalaman lainnya
Connector
Mempresentasikan
sambungan dari bagian alir yang terputus dihalaman yang sama
Predifined prosess Mempresentasikan operasi yang rinciannya suatu
ditunjukan ditempat lain
Flow line Menunjukan arah alur dan menghubungkan setiap bagian