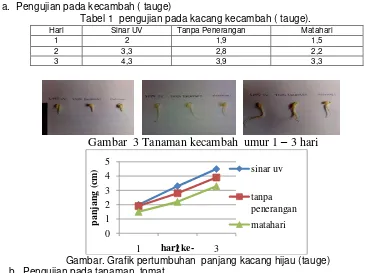
1
Rancang Bangun Sistem
Lock And Controlling Class Rooms (LCCR)
Berbasis Raspberry Pi
Mochamad Subianto1 1
Universitas Ma Chung, Malang, [email protected]
Abstrak
Suatu lembaga pendidikan mempunyai beberapa fasilitas khusunya ruang kelas yang mempunyai peranan paling penting dalam proses belajar mengajar. Oleh karena itu diperlukan pengawasan dan pengendalian agar proses belajar mengajar tidak terhambat atau terganggu. Telah dilakukan telaah mengenai proses pengontrolan sebuah ruangan beserta semua perangkat elektronik yang ada di dalam ruangan dengan menggunakan perangkat alat yang bernama Raspberry Pi. Raspberry Pi adalah komputer yang memiliki ukuran sebesar kartu kredit dengan harga relatif lebih murah dan dibuat oleh Raspberry Pi Foundation. Sistem pengontrolan Raspberry Pi dibantu oleh 2 buah alat yaitu Switch Arus Listrik dan Penguat Catu Daya. Switch Arus Listrik digunakan untuk memutus dan menyambungkan arus listrik AC. Penguat Catu Daya digunakan untuk meningkatkan arus DC dari GPIO menjadi 12V. Pemrograman untuk pengontrolan pada Raspberry Pi menggunakan bahasa pemrograman JAVA. Penggunaan MySQL database untuk central data yang ditelakkan pada server komputer sehingga konsep LCCR dapat diterapkan ke banyak ruangan atau beberapa Raspberry Pi. Pengontrolan sebuah ruangan untuk perkuliahan dan perangkat elektronik yang ada di dalam ruangan tersebut sangat penting untuk mengurangi kelalaian pengguna ruangan.
Kata kunci : Pengontrolan dan Penguncian Ruangan, Raspberry Pi, GPIO
1. Pendahuluan
Suatu lembaga pendidikan mempunyai beberapa fasilitas khusunya ruang kelas yang mempunyai peranan paling penting dalam proses belajar mengajar. Oleh karena itu diperlukan pengawasan dan pengendalian agar proses belajar mengajar tidak terhambat atau terganggu.
Pengawasan dan pengendalian sejumlah ruang kelas membutuhkan banyak waktu karena harus berkeliling dari satu ruang kelas ke ruang kelas lainnya untuk mengetahui kondisi ruang kelas seperti kondisi AC, komputer, LCD proyektor, lampu dan pintu. Pengawasan dan pengendalian tersebut harus dilakukan secara berkala setiap waktu tertentu.
Penggunaan peralatan elektronik yang terdapat dalam suatu ruang kelas juga harus diperhatikan dalam pengawasan. Peralatan elektronik dalam ruang kelas yang tidak sedang digunakan sebaiknya dimatikan untuk menghemat penggunaan listrik. Namun, terkadang pengguna ruangan lupa mematikan peralatan elektronik seperti AC atau komputer ketika meninggalkan ruangan. Oleh karena itu, proses pengawasan yang dilakukan harus memastikan bahwa peralatan dalam ruang yang menggunakan listrik telah dimatikan saat ruang kelas sudah tidak digunakan lagi.
Di dalam penelitian sebelumnya adalah sistem pengontrolan pintu dan peralatan elentronik yang ada di laboratorium menggunakan port-parallel [1]. Dan sistem pengunci pintu dengan RFID sebagai input [2]. Ditahun selanjutnya sistem pengaman rumah dengan mikrokontroler [3]. Dan sistem Magnetic Lock Door menggunakan kode pengaman berbasis ATMEGA [4]. Serta sistem pengamanan akses kantor pribadi [5]. Semua sistem tersebut mempunyai kelemahan pada penggunaan komputer yang mempunyai jumlah port paralel tidak mencukupi dengan jumlah banyak ruangan dan penggunaan IC ATMega yang belum bisa terkoneksi dengan database.
2
LCCR (lock and controlling class rooms) dengan menggunakan alat kontroler yang praktis dan dapat terintegrasi dengan database terpusat, sehingga dampak negatif yang terjadi akibat kelalaian pengguna dan petugas dapat diminimalisir.
2. Pembahasan
2.1 Metodologi Penelitian
1.1 Metode rancang bangun yang terdiri dari beberapa tahap yaitu : (1) Analisis Kebutuhan Sistem, (2) Desain Perancangan, (3) Pembuatan Alat, (4) Pengujian Alat.
1.2 Pengujian dilakukan pada blok-blok sistem dengan tujuan untuk mengetahui apakah alat yang telah dirancang dapat bekerja sesuai rancangan. Pengujian ini meliputi pengujian blok-blok sistem, tingkat fungsi. Dari hasil pengujian ini dibuat analisa yang akan mengetahui sejauh mana sistem rancangan ini memiliki kesesuaian dengan spesifikasi pengukuran dalam pengujian.
1.3 Pengujian fungsionalitas perangkat keras (hardware) Pengujian fungsionalitas perangkat kerang dengan cara pengukuran tingkat presisi arus output dari raspberry pi terhadap kebutuhan arus Magnetic lock sehingga magnetic lock dapat bekerja sesuai fungsinya. Tingkat presisi dapat dinyatakan dapat bekerja dengan cukup baik jika persentase tingkatan 90%>=presisi <=100%, rumus presisi dapat dilihat pada Rumus 1 [6].
(1) Keterangan :
1.4 = nilai ideal pengukuran ke-n
1.5 = nilai rata-ratanya n pengukuran
1.6 Pengujian juga dilakukan pengukuran responsibility dari perangkat lunak ke perangkat keras. Dalam hal ini tingkat responsibility dapat dinyatakan cukup baik jika rata-rata responsibility kurang dari 1 detik. Pengujian perangkat switch on/off listrik akan dilakukan dengan cara menyalakan dan mematikan lampu listrik.
1.7 2.2 Analisa Sistem 1.8 2.2.1 Alur sistem
Alur sistem LCCR dijabarkan dalam dua gambar yaitu Gambar 1 mengenai alur sistem pemakaian ruangan.
Gambar 1: System Flow Peminjaman Ruangan
1.9 2. 3 Arsitektur Sistem LCCR
3
ruangan dan log off yang menandakan selesainya penggunaan ruangan. Input dengan database merupakan kontrol pusat untuk melakukan penguncian atau mengirimkan kondisi emergency. Penggunaan satu buah raspberry pi yang berfungsi untuk penerima data dari barcode reader, mengirim dan menerima data dari database, mengontrol buka dan tutup kunci pintu, serta mengontrol switch on/off listrik. Sehingga proses peminjaman pada arsitektur Gambar 3 dapat dilakukan di depan ruangan kelas yang akan dipinjam. Untuk itu dalam pengembangannya, pengontrolan beberapa ruangan, maka setiap ruangan terdapat satu buah raspberry pi.
Gambar 3: Arsitektur Sederhana Aplikasi LCCR
Arsitektur sistem LCCR pada Gambar 4 mempunyai dua Switch Arus Listrik, yang membedakan keduanya hanyalah waktu prosesnya. Perangkat Switch Arus Listrik yang terhubung dengan kipas angin, lampu dan LCD monitor akan melakukan off jika pengguna dianggap sudah selesai menggunakan ruangan. Perangkat Switch Arus Listrik yang terhubung dengan AC, PC, dan LCD Proyektor hanya akan off jika tidak ada lagi jadwal pemakaian ruangan dan ruangan dalam kondisi tidak dipakai, hal ini dilakukankan karena perangkat yang terhubung pada switch ini mudah sekali rusak jika sering terjadi on/off listrik dalam waktu yang dekat. Dalam sistem LCCR ini untuk menjadikan kondisi standby atau menyala perangkat AC dan LCD Proyektor menggunakan remote device yang dikontrol oleh raspberry pi melalui perangkat Penguat Catu Daya (Lihat Gambar 4). Untuk pengontrolan PC menggunakan remote shutdown.
Gambar 4: Penggunaan Raspberry Pi
Sistem LCCR menggunakan modem wavecom 1206B yang berfungsi sebagai media SMS(Lihat Gambar 3). SMS dalam hal ini digunakan untuk proses konfirmasi bahwa waktu pemakaian ruangan sudah habis dan untuk proses permintaan penambahan waktu pakai dari pengguna.
1.11 2.4 Implementasi
2.4.1 Rangkaian Hardware dan Prototype Ruangan
4
sebuah ruangan. Bentuk perangkat Hardware dari sistem LCCR ini dapat dilihat pada Gambar 5.
Pada Gambar 6 terlihat beberapa rangkaian dan alat elektronik yang digunakan sebagai pendukung dalam sistem LCCR. Rangkaian tersebut yaitu: rangkaian input raspberry pi, rangkaian Penguat Catu Daya, rangkaian Switch Arus Listrik, rangkaian Penyearah Catu Daya, dan rangkaian flasher.
Gambar 5: Perangkat Hardware Sistem LCCR
Media pengontrolan ruangan dalam penelitian ini menggunakan prototype ruangan yang dapat dilihat pada Gambar 7. Dalam prototype yang dibuat terdapat sebuah pintu, lampu lambok DC, tombol exit request, lampu indikator, 2 buah terminal listrik dan remote AC serta electrric lock door.
Gambar 7: Protype Ruangan untuk LCCR
3. Hasil Dan Pembahasan
3.1 Pengujian Perang Keras
Pengujian perangkat keras LCCR dilakukan pengukuran menggunakan avometer dan hasil pengukuran tingkat presisi yaitu 92%.
3.2 Pengujian Perangkat Lunak
Pengujian perangkat lunak LCCR dilakukan pengukuran menggunakan metode white box dan Black Box. Hasil pengukuran performa perangkat lunak rata-rata 1684ms.
3.3 Pembahasan Hasil Pengujian
Berdasarkan hasil uji coba di atas bahwa sistem LCCR dapat mengontrol penggunaan ruangan dan mengontrol alat elektronik yang ada di dalam ruangan dengan mematikannya setelah ruangan selesai digunakan. Gambar 8 menunjukkan bahwa ruangan terkunci dan lampu listrik padam serta remote AC juga padam.
Gambar 8: Kondisi Prototype Ruangan Selesai Digunakan
5
Gambar 9: Kondisi Prototype Ruangan Digunakan
4. KESIMPULAN
Telah berhasil dibuat sistem Lock and Controlling Class Rooms (LCCR) menggunakan raspberry yang mempunyai kemampuan sebagai berikut:
1. Dapat mengontrol pintu dan dapat mengontrol arus listrik pada prototype ruangan. 2. Dapat menghubungkan dan memutuskan jaringan listrik secara otomatis ketika waktu
penggunaan ruangan sudah selesai dibandingkan sistem manual yang mempunyai tingkat kelalaian pengguna yang cukup tinggi.
3. Dapat diimplementasi di sebuah institusi pendidikan sebagai sistem pengamanan ruangan dan pengontrolan penggunaan ruangan serta pengontrolan alat elektrnik yang ada di dalam ruangan karena sistem LCCR terintegrasi dengan data Jadwal Kuliah.
Daftar Pustaka
1.
Subianto, M., 2010. Sistem Informasi Log Laboratorium (Si-Lola) Dengan Visual Basic.Net Dan Parallel Port Programming. Electrical Power, Electronics, Communication, Control, and Informatics Seminar. Volume 16 Desember 2010.2.
Verman, G. K. dan Pawan, T., 2010. A Digital Security System with Door Lock System Using RFID Technology. International Jurnal of Computer Aplication, Volume 5 No 11 Agustus 2010, Hal. 6 - 8.3.
Ahmed, A., Ahmed, T., Ullah, M. S. dan Islam, M. M., 2011, Controlling and securing a Digital Home using Multiple Sensor Based Perception system Integrated with Mobile and Voice technology, International Journal of Information and Communication Technology Research (IJICT), Vol.1, No.5 September 2011 , Hal. 189 - 196.4.
Ramakumbo, A. G., Yatmono, S. dan Ali, M., 2012. Magnetic Door Lock Menggunakan Kode Pengaman Berbasis Atmega 328. Yogyakarta, Universitas Negeri Yogyakarta.5.
Khan, R. S., 2012. Development of Low Cost Private Office Access ControlSystem(OACS). International Journal of Embedded Systems and
Applications(IJESA), Volume 2 No.2 Juni 20112, Hal. 1- 7.
6
Pengembangan Web Advertising Menggunakan Hierarki Model View
Controller (HMVC) Dengan Framework Codeigniter Pada Niaga
Binadarma
Rasmila1, Ari Muzakir2 1, 2
Universitas Bina Darma, Jl. Jendral A.Yani No.12 Plaju Palembang 30264, 1
ABSTRAK
Promosi dari suatu produk merupakan salah satu langkah yang tepat dalam meningkatkan income dari penjualan. Mempromosikan produk harus dilakukan secara intensif agar nilai penjualan terus meningkat. Advertising atau periklanan merupakan cara yang paling tepat dalam memperkenalkan produk yang kita jual kepada masyarakat umum, sehingga nilai jual dari produk yang ditawarkan semakin meningkat. media promosi dari iklan yang ditawarkan akhir-akhir ini terus meningkat diberbagai media, baik dari televisi, radio, koran, bahkan jejaring media sosial. niaga binadarma merupakan suatu sistem advertising online yang dimiliki oleh Universitas Binadarma dibawah binaan Binadarma Enterpreneurship Center (BDEC) yang digunakan oleh civitas akademika maupun umum dalam memperkenalkan atau menjual produk yang ingin dijual da jasa. Pengembangan yang dilakukan pada niaga binadarma diprioritaskan pada interface dari sistem jual beli dengan memanfaatkan framework codeigniter (CI) yang berbasis hierarchical model view controller (HMVC). HMVC adalah versi pengembangan dari design patern dari model view controller (MVC) sebagai software development yang saat ini banyak digunakan dalam mengembangkan aplikasi web. Framework CI dikenal dalam kemudahan pada saat pengembangan dan kecepatan pada saat akses ke suatu situs web sehingga diharapkan dapat meningkatkan transaksi yang dilakukan pengguna.
Kata kunci: advertising, hmvc, framework ci
1. Pendahuluan
Perkembangan dan penggunaan teknologi informasi saat ini telah mencakup segala bidang kehidupan. Perkembangan teknologi informasi dan komunikasi yang sangat cepat tidak dapat dipungkiri memberikan dampak positif bagi perkembangan ekonomi. Bagi perusahaan dan organisasi misalnya, telah menggunakan teknologi informasi sebagai modal untuk bersaing dengan kompetitor lainnya. Kelancaran di dalam berbisnis merupakan salah satunya. Saat ini terdapat jutaan situs web di internet yang mencakup berbagai topik, pemasaran dan pengembang usaha berlomba-lomba menampilkan situs perusahaan sebagai landasan pemasaran global. Advertising online merupakan salah satu cara dalam meningkatkan angka penjualan dari suatu produk yang ditawarkan. Hal ini yang tengah dilakukan oleh Niaga Binadarma sebagai salah satu situs jual beli online di Palembang.
Niaga Binadarma merupakan organisasi penyedia jasa dan pengiklanan dibawah naungan Binadarma Enterpreneurship Center (BDEC) yang merupakan organisasi dalam memfasilitasi mahasiswa dalam berwirausaha. Niaga Binadarma sementara ini berfokus pada produk dan jasa yang ditawarkan civitas akademika Universitas Binadarma. Berbagai jenis produk yang diiklankan pada laman situs web ini menjadi daya tarik tersendiri bagi masyarakat umum yang telah mengenal laman situs ini. Halaman situs Niaga Binadarma dapat diakses di alamat http://niaga.binadarma.ac.id yang saat ini dikelola oleh web admin BDEC.
7
dilakukan dari pertama kali di munculkan ke publik. Apalagi dukungan yang kurang memadai jika diakses menggunakan perangkat mobile atau perangkat genggam lainnya. Hal ini tentunya akan membuat pengguna dan pengakses ke situs niaga binadarma menjadi semakin berkurang. Hal ini dibuktikan dengan jumlah peminat untuk mengiklankan produk dan jasa yang semakin lama sepi pengunjung. Oleh karena itu dibutuhkan suatu website iklan jual beli online yang dapat memberikan kesan user friendly, mudah dan cepat dimanapun ketika diakses baik melalui perangkat komputer maupun mobile.
Dalam proses pengembangan niaga binadarma tersebut dibutuhkan sebuah metode pengembangan sistem yang digunakan sebagai acuan dalam proses pengembangan. Metode pengembangan yang digunakan pada niaga binadarma ini adalah menggunakan prototyping model. Cakupan aktivitas dari prototyping model terdiri dari :
1. Mendefinisikan objektif secara keseluruhan dan mengidentifikasi kebutuhan yang sudah diketahui.
2. Melakukan perancangan secara cepat sebagai dasar untuk membuat prototype. 3. Menguji coba dan mengevaluasi prototype dan kemudian melakukan penambahan
dan perbaikan-perbaikan terhadap prototype yang sudah dibuat.
2. Pembahasan
Tampilan menu utama merupakan tampilan menu awal yang menunjukan menu untuk melihat web niaga binadarma. Kategori terdiri dari menu utama web advertising ini terdiri dari kategori iklan terbaru & iklan terpopuler, iklan terpopuler, halaman utama administrator, halaman moderasi iklan di halaman admin, halaman aktivasi member di menu admin, tampilan posting iklan baru oleh member.
Gambar 1 Menu Utama Web Advertising
Untuk melihat iklan yang tayang dapat langsung mengakses halaman utama karena iklan akan otomatis muncul dihalam utama. Pada halaman utama web advertising ini terdapat space untuk iklan terbaru dan iklan terpopuler. Maka halaman yang muncul dapat dilihat pada gambar berikut ini:
8
Pada halaman ini, iklan yang baru di tayangkan akan menempati urutan teratas masuk dalam bagian iklan terbaru sehingga ketika ada pengunjung akan langsung disuguhkan dengan iklan yang masih hot. Kemudian selain dari iklan terbaru juga terdapat iklan terpopuler. Iklan terpopuler ini merupakan iklan yang paling banyak diakses oleh pengunjung. Jika iklan di klik, maka akan muncul tampilan seperti pada Gambar berikut.
Gambar 3 Halaman Detail Iklan Terpopuler
Halaman utama administrator berfungsi untuk memanajemen seluruh konten yang ada di web advertising niaga binadarma ini. Berikut diperlihatkan pada Gambar halaman utama admin.
Gambar 4 Halaman Utama Administrator
Jika member ingin membuat iklan baru, maka iklan tidak akan langsung dapat ditampilkan namun harus melalui moderasi dari administrator. Jika iklan telah disetujui maka iklan baru bisa ditayangkan. Berikut diperlihatkan pada Gambar 13 proses moderasi iklan oleh admin.
Gambar 5 halaman Moderasi Iklan di Halaman Admin
9
Gambar 6 Halaman Aktivasi Member di Menu Admin
Member yang ingin membuat iklan baru dapat dilakukan dengan sangat mudah setelah proses login berhasil. Gambar 15 berikut memperlihatkan bagaimana mudahnya member membuat iklan baru di halaman member sendiri.
Gambar 7 tampilan Posting Iklan Baru oleh Member
3. Kesimpulan
Peran advertising bagi perekonomian khususnya di Indonesia sangat penting karena dapat meningkatkan penjualan produk dalam negeri di Indonesia sendiri maupun hingga ekspor keluar negeri, disamping dapat meningkatkan lapangan pekerjaan sehingga dapat menekan angka pengangguran. Maka dengan ada advertising, pembangunan negara Indonesia menjadi meningkat tapi pertumbuhan negara Indonesia juga bertambah.
Daftar Pustaka
1. Allen ,2008, Pengertian Model View Controller. Diakses 9 November 2013 dari http://library.binus.ac.id/eColls/eThesis/Bab2/2012-1-00075-IF%20Bab%202.pdf 2. Baihalqi, P.A .2013. Practical PHP: CodeIgniter, Doctrine TWIG, Elex Media
Komputindo, Jakarta.
3. Hakim .2010. Pengertian CodeIgeniter. Diakses 9 November 2013 dari http://library.binus.ac.id/eColls/eThesis/Bab2/2011-1-00153-IF%20BAB%202.pdf 4. Hakim, Wahyu Lukman. 2010. Prototyping Model Proses, Diakses tanggal 4
Desember 2013 dari http://www.scribd.com/doc/58298607/Pengertian-Prototype
5. Jason Cai, Ranjit Kapila, and Gaurav Pal (July 2000). "HMVC: The layered pattern for developing strong client tiers". JavaWorld. Retrieved 2006-05-25.
6. Jefkins, Frank. 1997. Periklanan. Jakarta : Erlangga.
10
Analisa Penerimaan Pengguna Akhir Dengan Menggunakan Tam Dan
Eucs Terhadap Penerapan E-Learning Pada Universitas Bina Darma
Palembang
Ade Putra, Nia Oktaviani
Dosen Universitas Bina Darma
Jalan Jenderal Ahmad Yani No.12 Palembang
E-mail :[email protected], [email protected]
Abstrak
Penelitian ini bertujuan untuk menguji model Penerimaan (Acceptance) penggunaan sistem E-Learning di Universitas Bina Darma dengan menggunakan model Technology Acceptance Model (TAM) dan End User Computing Satisfaction (EUCS). Dalam lingkungan teknologi informasi yang bersifat Mandatory Use dimanapemakai tidak memiliki kebebasan penggunaan sistem informasi yang dipergunakan, tentunya Penerimaan (Acceptance) akan berbeda jika lingkunganteknologi tersebut bersifat Voluntary Use. Dalam lingkungan teknologi informasiyang bersifat Voluntary Use maka pemakai sistem E-Learning mempunyai Kebebasan (Freedom) untuk memutuskan memakai atau tidak memakai sistem informasitersebut. Dalam lingkungan yang bersifat Mandatory Use, kepuasan penggunamenjadi ukuran penerimaan penggunaan sistem E-Learning.
Subyek penelitian yang digunakan adalah para mahasiswa Universitas Bina Darma. Pengujian yang dilakukan dengan menggunakan metode Structural Equation Modeling (SEM.) dengan memanfaat software AMOS.
Kata Kunci :Technology Acceptance Model, End User Computing Satisfaction,mandatory use, sistem e-learning
1. PENDAHULUAN
Teknologi informasi salah satu bagian dari kebutuhan akan perkembangan zaman yang membantu para penggunanya menjadi lebih mudah serta efisien dalam pemanfaatannya. Dengan adanya teknologi yang semakin berkembang tidak menjadi hambatan bagi para penggunanya untuk menggunakan sistem informasi yang tersedia.
Menurut Syam (1999) dan Indriantoro (2000), penerapan TI bagi perusahaan mempunyai peranan penting dan dapat menjadi pusat strategi bisnis untuk memperoleh keunggulan bersaing. Selanjutnya Downing (1993); Trisnawati (1998); dan Syam (1999) juga menyebutkan bahwa saat ini teknologi informasi sudah menjadi kebutuhan dasar bagi setiap perusahaan terutama dalam menjalankan segala aspek aktivitas organisasi. Proses bisnis pun terpengaruh oleh adanya kemajuan teknologi yang sangat cepat ini.
Universitas Bina Darma merupakan salah satu instansi pendidikan yang mengutamakan dalam bidang pendidikan teknologi informasi sebagai suatu keunggulannya. Penerapan dari teknologi informasi tersebut adalah sistem informasi yang bertujuan untuk mendukung aktivitas para mahasiswa dalam kebutuhan suatu informasi. Salah satu dari informasi yang digunakan mahasiswa tersebut adalah e-learning.
2. METODOLOGI PENELITIAN
2.1. Technology Acceptance Model (TAM)
Model Technology Acceptance Model (TAM) sebenarnya diadopsi dari model The Theory of Reasoned Action (TRA). variabel model TAM yaitu Kemanfaatan (usefulness) dan Kemudahan penggunaan (ease of use) dapat menjelaskan aspek keperilakuan pemakai (Igbaria.et.al, 1997).
11
Model ini dikembangkan oleh Doll dan Torkzadeh (1988) yang digunakan untuk mengukur kepuasan pemakai akhir komputer. Mereka mengembangkan instrumen pengukur kepuasan yaitu instrumen end user computing satisfaction (EUCS). Doll dan Torkzadeh mengembangkan instrumen EUCS yang terdiri dari 12 item dengan membandingkan lingkungan pemrosesan data tradisional dengan lingkungan end user computing, yang meliputi 5 komponen: Isi (content), Akurasi(accuracy), Bentuk (format), Kemudahan (ease) dan Ketepatan Waktu (timeliness).
2.3. Penerimaan Pemakai (User Acceptance)
Dalam penelitian ini kepuasan pemakai (user satisfaction) menjadi indikator utama dalam penerimaan sistem core banking. Tingkat kepuasan pemakai dapat diukur berdasarkan beberapa karakteristik, antara lain hubungan antara staf TI dengan pemakai, kemudahan (ease of use) dan manfaat (usefulness) penggunaan system, informasi yang disajikan dan cara kerja system (Al-Gahtani, 2001).
2.4. Hipotesis
Hipotesis 1 : Kemanfaatan (usefulness) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
Hipotesis 2 : Kemudahan penggunaan (ease of use) berpengaruh secara positif
terhadap penerimaan (acceptance) penggunaan sistem e-learning
Hipotesis 3 : Isi (content) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
Hipotesis 4 : Akurasi (accuracy) berpengaruh secara positif terhadap penerimaan
(acceptance) penggunaan sistem e-learning
Hipotesis 5 : Bentuk (format) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
Hipotesis 6 : Kemudahan (ease) berpengaruh secara positif terhadap penerimaan
(acceptance) penggunaan sistem e-learning
Hipotesis 7 : Ketepatan waktu (timeliness) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
2.5. Kerangka Pemikiran
2.5.1. Technology Acceptance Model (TAM)
Dalam penelitian ini menggabungkan 2 (dua) model sebagai kerangka pemikiran teoritis yaitu Technology Acceptance Model (TAM) dan End UserComputing Satisfaction (EUCS) dalam lingkungan penggunaan sistem informasi yang bersifat mandatory use.
2.5.2. End User Computing Satisfaction (Eucs).
kerangka konseptual untuk pengujian Hipotesis 3 sampai dengan Hipotesis 7 yang terdiri dari variabel Isi (content), Akurasi (accuracy), Bentuk (format), Kemudahan (ease) dan Ketepatan Waktu (timeliness) didasarkan pada model Kepuasan Pemakai Akhir Sistem (End User Computing Satisfaction) yang dikembangkan oleh Doll dan Torkzadeh (1988) dapat digambarkan sebagai berikut :
2.6. Motode Analisis Data
Metode analisis yang digunakan dalam penelitian ini menggunakan Structural Equation Modeling (SEM). SEM merupakan teknik multivariate yang mengkombinasikan aspek regresi berganda dan analisis faktor untuk mengestimasi serangkaian hubungan ketergantungan secara simultan (Hair et al, 1998). Pengujian hipotesis dilakukan dengan menggunakan program AMOS version 20 untuk menganalisis hubungan kausalitas dalam model struktural yang diusulkan.
3. HASIL.
3.3. Hasil Analisis Data
12
Populasi dalam penelitian ini adalah mahasiswa yang ada di lingkungan Universitas Bina Darma dimana data awal dilakukan penyebaran kuisioner sebanyak 200 rangkap dan kuisioner yang di kembalikan sebanyak 102 lembar dan dimana telah dilakukan pengolahan data dapat di ambil sebanyak 68 data yang memiliki data yang baik. Pemeriksaan validitas instrumen dilakukan dengan uji interkorelasi dan jika r > 0.3 maka item bersangkutan dikatakan valid. Sedangkan uji reliabilitas instrumen dilakukan dengan melihat koefisien Cronbach, dan jika > 0.6 maka instrumen penelitian dikatakan reliable
3.3.2. Hasil Analisis Tahap Akhir TAM
Hasil uji konstruk TAM tahp akhir akhir disajikan pada Gambar 4. dievaluasi berdasarkan goodness of fit indices, kriteria model serta nilai kritisnya yang memiliki kesesuaian data seperti yang nampak pada Tabel 3.
Gambar 4. Analisis Tahap Akhir TAM
Dengan memperhatikan pengaruh sikap dan kepuasan terhadap penerimaan Teknologi Informasi, pengujian hipotesis pada penelitian ini menggunakan software AMOS 20. Penelitian ini dilakukan dengan cara melihat jalur-jalur pada model Structural yang signifikan. Untuk mengetahui jalur-jalur hubungan (dampak) yang signifikan dapat dilihat pada uji koefisien path secara parsiil. Hasil uji secara parsiil terhadap koefisien path pada setiap jalur
Tabel 3. Hasil Uji TAM Tahap Akhir
Indikator Loading Factor (p value) Keterangan
Pengaruh PU Terhadap Acceptance_TI 1,000 FIX
Pengaruh PEU Terhadap Acceptance_TI 1,000 FIX
3.3.3. Hasil Analisis Tahap Akhir EUCS
Hasil uji konstruk EUCS tahap akhir disajikan pada Gambar 5. dievaluasi berdasarkan goodness of fit indices, kriteria model serta nilai kritisnya yang memiliki kesesuaian data seperti yang nampak pada Tabel 4
13
Dengan memperhatikan pengaruh sikap dan kepuasan terhadap penerimaan Teknologi Informasi, pengujian hipotesis pada penelitian ini menggunakan software AMOS 20. Penelitian ini dilakukan dengan cara melihat jalur-jalur pada model struktural yang signifikan. Untuk mengetahui jalur-jalur hubungan (dampak) yang signifikan dapat dilihat pada uji koefisien path secara parsiil. Hasil uji secara parsiil terhadap koefisien path pada setiap jalur
Tabel 4. Hasil Uji EUCSTahap Akhir
Indikator Loading Factor (p value) Keterangan
Pengaruh EUCS Terhadap Accuracy 1,000 (FIX) FIX
Pengaruh EUCS Terhadap Format 1,000 (FIX) FIX
Pengaruh EUCS Terhadap Easy of use 0,001 Signifikan
Pengaruh EUCS Terhadap Timeless 1,000 (FIX) FIX
Pengaruh EUCS Terhadap Content 1,000 (FIX) FIX
Pengaruh EUCS Terhadap Acceptance 0,176 (0,247 Signifikan
3.4. Pembahasan
3.4.1.Hipotesis 1 :Kemanfaatan (Usefulness) berpengaruh secara positif terhadap penerimaan (Acceptance) penggunaan sistem E-Learning
Untuk hipotesa 1 yaitu kemanfaatan (Usefulness) berpengaruh secara positif terhadap penerimaan (Acceptance) penggunaan sistem E-Elearning hal ini dpat di benarkan dengan adanya pengujian hipotesis model TAM yang di uraikan pada gambar 4 dan di perjelas dengan rincian yang ada pada table 3. dimana pengaruh dari PU /Usefulness terhadap Acceptance_TI memiliki nilai loading factor p value sebesar 1,000 3.4.2. Hipotesis 2 : Kemudahan penggunaan (ease of use) berpengaruh secara positif
terhadap penerimaan (acceptance) penggunaan sistem e-learning
Untuk hipotesa 2 kemudahan penggunaan (easy of use) berpengaruh secara positif terhadap penerimaan (Acceptance) penggunaan system e-learning hal ini dapat dibenarkan dengan adanya pengujian hipotesa model TAM yang di uraikan pada gambar 4 dan di perjelas dengan rincian yang ada pada table 3 dimana pengaruh dari easy of use terhadap Acceptance_TI memiliki nilai loading factor p value sebesar 1,000
3.4.3. Hipotesis 3 : Isi (content) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
Untuk hipotesa 3 yaitu Isi (content) berpengaruh secara pasti (Fix) terhadap penerimaan (Acceptance) penggunaan system e-learning hal ini dapat dibenarkan dengan adanya pengujian hipotesa model EUCS yang diuraikan pada gambar 5 dan di perjelas dengan rincian yang ada pada table 4 dimana pengaruh dari content terhadap acceptance memiliki loading factor p value sebesar 1,000
3.4.4. Hipotesis 4 : Akurasi (accuracy) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
Untuk hipotesa 4 yaitu akurasi (accuracy) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan system e- learning hal ini dapat dibenarkan dengan adanya pengujian hipotesa model EUCS yang di uraikan pada gambar 5 dan diperjelas dengan rincian yang ada pada table 4 dimana pengaruh dari accruracy terhadap acceptance memiliki loading factor p value sebeasr 1,000
3.4.5. Hipotesis 5 : Bentuk (format) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
Untuk hipotesa 5 yaitu bentuk (format) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan system e-learning hal ini dapat dibenarkan dengan adanya pengujian hipotesa model EUCS yang diuraikan pada gambar 5 dan diperjelas dengan rincian yang ada pada table 4 dimana pengaruh dari accuracy terhadap acceptance memiliki loading factor p value sebesar 1,000
14
Untuk hipotesa 6 yaitu kemudahan (Easy of Use) berpengaruh secara positif dan signifikan terhadap penerimaan (acceptance) penggunaan system e- learning hal ini dapat dibenarkan dengan adanya pengujian hipotesa model EUCS yang diuraikan pada gambar 5 dan di perjelas dengan rincian yang ada pada table 4 dimana pengaruh dari Easy of Use terhadap Acceptance memiliki nilai p value sebesar 0,001
3.4.7. Hipotesis 7 : Ketepatan waktu (timeliness) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaan sistem e-learning
Untuk hipotesa 7 yaitu ketepatan waktu (timeless) berpengaruh secara positif terhadap penerimaan (acceptance) penggunaansystem e-learning hal ini dapat dibenarkan dengan adanya pengujian hipotesa model EUCS yang diuraikan pada gambar 5 dan di perjelas dengan rincian yang ada pada table 4 dimana pengaruh dari timeless terhadap acceptance memiliki nilai p value sebesar 1,000.
4. KESIMPULAN
Peneliti mengunakan dua model, yaitu model TAM & EUCS, dan ingin mengetahui pengaruh penerimaan pengguna akhir dari system elearning di dlingkungan universitas bina darma Variabel yang diuji berkaitan dengan hipotesis meliputi Persepsi
Manfaat dan effectiveness yang Dirasakan(PU) ,Persepsi Mudah
Penggunaannya(PEU),Sikap Menggunakan TI (ATU), Penerimaan TI (ATI) dan Kepuasan Pemakai Akhir Komputer (EUCS).
Jumlah mahasiswa yang dijadikan responden sebanyak 170 mahasiswa dari masing – masing program studi, tetapi hanya 102 mahasiswa yang mengembalikan kuisioner kepada peneliti, setelah data primer diolah terdapat beberapa responden yang tidak layak untuk diuji dengan menggunakan Amos 20 sehingga harus dilakukan penyesuain terahdap data primer yang dipakai sehingga hanya 68 kuisioner yang di anggap layak untuk dilakukan pengujian hipotesa Dengan menggunakan analisis SEM, maka hasil penelitian dapat disimpulkan sebagai berikut :
1. System elearing yang ada di universitas bina darma memiliki manfaat yang baik terhadap mahasiswa untuk proses perkuliahaan hal ini yang dinyatakan dengan nilai loading factor p value 1,000 (Fix) / pasti memiliki pengaruh.
2. System elearning yang ada di universitas bina darma memiliki kegunaan yang berpengaruh positif terhadap penerimaan dari pengguna akhir yaitu seluruh mahasiswa dilingkungan universitas bina darma
3. System elearning yang ada di universitas bina darma memiliki struktur content yang baik sehingga berpengaruh positif terhadap pengguna akhir hal ini di nyatakan dengan nilai p value sebesar 1,000.
4. System elearning yang ada dilingkungan universitas bina darma memiliki akurasi informasi yang baik dan berpengaruh positif terhadap penguna akhir hal ini dinyatakan dengan adanya nilai loading factor p value sebesar 1,000.
5. System elearning yang ada dilingkungan universitas bina darma memiliki format tampilan yang baik sehingga berpengaruh positif terhadap pengguna akhir hal ini dinyatakan dengan adanya nilai loading factor p value sebesar 1,000
6. System elearning yang ada dilingkungna universitas bina darma memiliki kemudahan dalam penggunaannya sehingga berpengaruh secara positif terhadap pengguna akhir hal ini dinyatakan dengan nilai loading p factor sebesar 0,001 7. System elearning yang ada dilingkungan universitas bina darma memiliki ketepatan
15
DAFTAR PUSTAKA1. Al-Gahtani, Said S. 2001. ―The Applicability of TAM Outside North America: An
Empirical Test in the United Kingdom.‖,
http://www.ideagroup.com/articles/details..asp?id=361
2. Doll, W.J, and Torkzadeh, G. 1988. The Measurement of End-User Computing Satisfaction. MIS Quaterly (12:2), pp. 259-274.
3. Hair et al., (1998), Multivariate Data Analysis, Fifth Edition, Prentice Hall, Upper Saddle River : New Jersy.
4. Indriantoro, Nur.2000. ―Pengaruh Computer Anxiety terhadap keahlian dosen dalam penggunaan komputer ‖. Jurnal Akuntansi dan Auditing (JAAI), Volume 4 no 2 Desember, Fakultas Ekonomi, Universitas Islam Indonesia (UII), Yogyakarta
5. Igbaria, M.N., Zinaelli, P.C. and Cavaye, L.M. (1997). Personal Computing Acceptance Factors in Small Firms: A Structural Equation Model. MIS Quarterly, 21(3), 279-305
6. Syam Fazli BZ.1999. Dampak Kompleksitas Teknologi informasi bagi strategi dan kelangsungan usaha?, Jurnal Akuntansi dan Auditing (JAAI) Vol.3 no.1, FE. UII Yogyakarta
16
Hold Altitude Design for QuadCopter Using Barometric BMP085
Based on Fuzzy Controller
Arbil Yodinata1, YohanesGunawan Yusuf2, Hendi Wicaksono3
Electrical Engineering Dept. Universitas Surabaya, Raya Kalirungkut Surabaya, 1
[email protected], 2 [email protected], 3 [email protected],
ABSTRAK
Quadcopter merupakan UAV (Unmanned Aerial Vehicle) yang akhir-akhir ini sudah banyak berkembang di kehidupan sehari-hari. Quadcopter mempunyai kemampuan untuk melakukan Vertical Take Off and Landing. Hal tersebut didukung dengan adanya 4 buah rotor sebagai penggeraknya. QuadCopter sendiri mempunyai 3 dasar gerakan terbang untuk bermanuver, yaitu gerakan pitch (gerakan depan dan belakang), gerakan roll (gerakan samping), dan gerakan yaw (gerakan memutar). Tiga gerakan dasar tersebut dihasilkan dari kecepatan 4 buah rotornya yang diatur sedemikian rupa dan dikontrol oleh sebuah kontroler terbang. Penggunaan kontroler terbang didasarkan dari fitur dan harga yang ada di pasaran. Kontroler terbang yang mempunyai harga yang tidak terlalu mahal dan mempunyai fitur cukup lengkap adalah board kontroler KK2.0. Namun KK2.0 mempunyai kekurangan, yaitu tidak adanya fitur Hold Altitude. Dengan menambahkan board kontroler baru yang bernama board kontroler YoHe v1.1, fitur Altitude Hold ditambahkan sebagai pelengkap kekurangan fitur pada KK2.0. Desain Altitude Hold dalam paper ini dipresentasikan menggunakan Fuzzy Controller dengan penggunaan sensor barometer BMP085 sebagai acuan ketinggian.
Kata kunci: Altitude Hold, Fuzzy Controller, Quadcopter, Board YoHe v1.1.
1. Pendahuluan
Pada makalah ini menggunakan UAV (Unmanned Aerial Vehicle) atau pesawat tanpa awak bertipe multirotor yang mempunyai 4 buah rotor, dan sering disebut QuadCopter. QuadCopter sendiri mampu melakukan gerakan VTOL (Vertical Take-Off and Landing) secara langsung. Hal ini menjadi salah satu keunggulan QuadCopter dari UAV bertipe Fixed-wing atau sering disebut pesawat bersayap yang membutuhkan landasan untuk melakukan take-off and landing (Bouabdallah, Murrieri, &Siegwart, 2004). Selain itu, pada QuadCopter untuk melakukan gerakan pitch, roll, dan yaw hanya perlu mengatur kombinasi kecepatan dari keempat buah rotor (Salih & Moghavvemi, 2010). Ini juga menjadi keunggulan lain QuadCopter dari tipe UAV yang lain. Sebagai contoh UAV bertipe single rotor untuk melakukan gerakan pitch, roll, dan yaw membutuhkan gerakan mekanisme servo untuk mengatur arah rotor tersebut.
QuadCopter sendiri biasanya banyak digunakan sebagai sarana surveillance dan monitoring. Ini disebabkan QuadCopter memiliki kemampuan hover di udara dalam ketinggian dan titik tertentu. Dalam mode surveillance juga harus bisa mengendalikan gerak roll, pitch, dan yaw dari QuadCopter. Gerakan roll, pitch, dan yaw sendiri seringkali mempengaruhi ketinggian dari QuadCopter baik bertambah tinggi maupun cenderung menurun. Dari sebab itu, dibutuhkan sebuah sistem kontrol untuk menyetabilkan ketinggian QuadCopter tersebut.
17
2. Struktur QuadcopterSebuah Quadcopter membutuhkan beberapa bagian yang harus dirakit. Bagian-bagian minimal yang harus ada pada sebuah QuadCopter yaitu frame (kerangka), motor 3 fase, ESC (Electronic Speed Controller), remote control beserta modul TX-RX, baterai, propeller (baling-baling), dan board kontroler. Spesifikasi komponen Quadcopter yang digunakan dapat dilihat pada Tabel 1.
Tabel 1. Spesifikasi Komponen Quadcopter
No Barang Jumlah Merk
1 Frame X-Copter 1 DJI F-450
2 Propeller 2 CW, 2CCW DJI
3 Motor Brushless 4 Turnigy SK3
4 ESC 4 Turnigy Plush 30 A
5 Flight Controller 1 KK2.0
6 Baterai Li-Po 3 cell 1 Turnigy
7 R/C 1 Turnigy 9XR
Setelah semua bagian pada QuadCopter lengkap, maka dilakukan pemasangan dan pengabelan agar bagian-bagian tersebut menjadi satu kesatuan sistem yang saling berhubungan. Channel 1 – channel 5 pada RX dihubungkan dengan board kontroler KK2.0 pada bagian input. Pada umumnya sebuah QuadCopter membutuhkan minimal 4 channel yang secara berurutan terdiri atas throttle, aileron, elevator, dan rudder. Sedangkan pada kontroler KK2.0 ini membutuhkan tambahan sebuah channel, yaitu channel 5 yang berfungsi sebagai pengaktif self-leveling atau attitude hold. Kemudian kontroler KK2.0 bagian output dihubungkan dengan ESC di bagian input sinyal. Sedangkan pada bagian output ESC dihubungkan dengan motor. Untuk skema pengabelan secara lengkap dapat dilihat pada Gambar 1. Sedangkan pada pengabelan auto perbedaanya adalah pada channel 1 yaitu sinyal throttle dari RX yang semula masuk ke KK2.0 diputus. Selanjutnya sinyal throttle tersebut dihubungkan ke kontroler tambahanya itu board YoHe sebagai input kemudian output dari board YoHe dihubungkan ke KK2.0. Selain channel throttle RX, sisa channel RX yaitu channel 6 – channel 8 juga dihubungkan dengan board YoHe. Channel 6 ini berfungsi sebagai penenetu QuadCopter dikendalikan secara manual atau auto. Sedangkan channel 7 dan channel 8 nantinya digunakan untuk kombinasi parameter-parameter input membership function dari fuzzy. Skema pengabelan untuk sistem auto terlihat pada Gambar 2.
Gambar 1. Skema Pengabelan Quadcopter General
18
3. Desain Sistem Kontrol FuzzyDalam makalah ini desain sistem kontrol Fuzzy diprogramkan ke board Yo-He v1.1 yang menggunakan ATMega2560 sebagai IC mikrokontroler. ATMega2560 mempunyai kapasitas memori program sebesar 256 MB. Pemrograman sistem kontrol Fuzzy yang dibuat berbasis array. Hal tersebut dilakukan agar nantinya parameter-parameter Fuzzy menjadi lebih fleksibel dan mudah diubah pada proses optimalisasi performansi sistem kontrol Fuzzy yang dibuat.
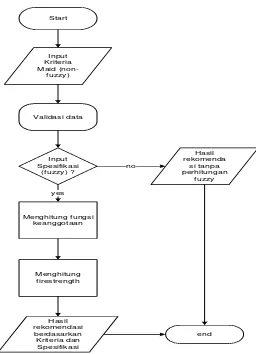
Sistem kontrol hold altitude yang dibuat mempunyai alur proses sebagai berikut. (1) Switch mode auto aktif dan dibaca Board Yo-He, (2) pengambilan target ketinggian dari nilai bacaan sensor barometer pertama kali saat switch mode auto aktif, (3) pengambilan nilai throttle saat switch mode auto aktif menjadi nilai throttle awal, (4) error didapatkan dari selisih nilai pembacaan sensor barometer dengan nilai target ketinggian (E) delta error didapatkan dari selisih error sekarang dan sebelum (dE). Input sistem kontrol Fuzzy adalah nilai E dan dE (5) proses kalkulasi Fuzzy dijalankan (6) output proses kalkulasi yang berupa nilai throttle dikirimkan ke board KK2.0. Alur sistem kontrol Fuzzy terdapat pada Gambar 3.
Gambar 3. Alur Sistem Kontrol Fuzzy
(Dadone, Vanlandingham, Baumann, &Sarin, 2001)
4. AnalisisPerformansiSistemKontrolFuzzy
Optimalisasi performansi dari parameter-parameter fuzzy yang ada sudah banyak dilakukan seperti mengubah IMF error dan delta error baik dari nilai maupun jumlah keanggotaannya, mengubah nilai-nilai OMF, dan mengubah rule base. Berikut kombinasi perubahan yang dilakukan.
Gambar 4. Tiga Konfigurasi Optimasi Nilai IMF Error (Terbaik Warna Kuning)
19
sensor pembacaan nilai ketinggian secara signifikan apabila terjadi perubahan sebesar 0.5 m.
Gambar 5. Hasil Optimasi Nilai IMF Error
5. Kesimpulan
Setelah mencari parameter-parameter sistem kontrol Fuzzy didapatkan bahwa system kontrol Fuzzy sebagai hold altitude Quadcopter menggunakan sensor barometer menghasilkan respon terbang Quadcopter yang kurang baik dengan besar osilasi ± 0.41 m dari target ketinggian yang diinginkan. Hal ini disebabkan karena ketelitian dari sensor barometer yang digunakan kurang teliti.
DaftarPustaka
1. Bouabdallah, S., Murrieri, P., &Siegwart, R. (2004). Design and control of an indoor micro quadrotor. IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA ‟04. 2004, 4393–4398 Vol.5. doi:10.1109/ROBOT.2004.1302409 2. Dadone, P., Vanlandingham, H. F., Baumann, W. T., &Sarin, S. C. (2001). Design
Optimization of Fuzzy Logic Systems. Virginia Polytechnic Institute and State University.
20
Altitude Lock Design for QuadCopter Using Sonar Based on Fuzzy
Controller
Hendi Wicaksono1, Yohanes Gunawan Yusuf2, Arbil Yodinata3
Electrical Engineering Dept. Universitas Surabaya, Raya Kalirungkut Surabaya, 1
[email protected], 2 [email protected], 3 [email protected]
ABSTRAK
Quadcopter merupakan sebuah pesawat tanpa awak yang terus dikembangkan belakangan ini. Quadcopter memiliki 4 buah baling-baling penggerak (propeller) yang memungkinkan pesawat tanpa awak ini dapat melakukan Vertical Take Off and Landing (VTOL). Terdapat 3 macam gerakan terbang Quadcopter yaitu gerakan pitch (gerakan ke depan dan belakang), gerakan roll (gerakan ke samping), dan gerakan yaw (gerakan memutar/rotasi). Quadcopter memerlukan sebuah kontroler terbang agar kecepatan putar 4 buah propeller dapat diatur sedemikian rupa agar dapat melakukan ketiga gerakan tersebut. Kontroler terbang yang popular dengan harga yang cukup terjangkau adalah board kontroler KK2.0. Dengan board kontroler KK2.0, Quadcopter dapat dengan mudah dikontrol gerak terbangnya. Pada paper ini mempresentasikan desain fitur baru yang tidak dimiliki KK2.0 yaitu fitur Altitude Lock yang didesain pada board kontroler YoHe v1.1 berbasis Fuzzy Controller. Dengan penggabungan board kontroler KK2.0 dan board kontroler YoHe dengan fitur Altitude Lock membuat Quadcopter mempunyai kemampuan selalu menjaga ketinggiannya tidak berubah-ubah. Fitur Altitude Lock pada board kontroler YoHe v1.1 ini mampu menjaga ketinggian ± 10 cm dari ketinggian yang diinginkan.
Kata kunci: Altitude Lock, Fuzzy Controller, Quadcopter, Board YoHe v1.1.
1. Pendahuluan
Bagi para pecinta aeromodelling, nama Quadcopter sudah tidak asing lagi. Quadcopter adalah pesawat tanpa awak yang mempunyai 4 buah baling-baling (propeller). Prinsip terbang Quadcopter menyerupai prinsip terbang helikopter yang mempunyai kemampuan Vertical Take Off and Landing (VTOL). Prinsip terbang VTOL mempunyai keuntungan lebih banyak dari prinsip terbang lainnya (Bouabdallah, Murrieri, & Siegwart, 2004). Quadcopter dikategorikan sebagai Unmanned Aerial Vehicle (UAV) dikarenakan Quadcopter tidak memerlukan pilot untuk menerbangkannya (Salih & Moghavvemi, 2010). Sebuah Quadcopter dapat dikendalikan menggunakan R/C (Remote Control) ataupun terbang secara otomatis. Quadcopter memiliki 3 buah motion gerak, yaitu pitch, roll, dan yaw. (Salih & Moghavvemi, 2010).
Board KK2.0 merupakan board flight controller yang popular di dunia aeromodelling. Flight controller ini pengoperasiannya mudah dan harga relatif terjangkau. Board KK2.0 ini mendeteksi besarnya pulsa yang keluar dari RX R/C kemudian dari informasi tersebut, KK2.0 mengatur kecepatan 4 buah motor agar menghasilkan motion gerak yang diinginkan. Dan setelah itu, KK2.0 secara otomatis menyetabilkan Quadcopter sejajar dengan bidang datar. Hal tersebut memudahkan pengguna dalam mengontrol gerak Quadcopter melalui sebuah R/C. Jika sebuah Quadcopter yang dilengkapi board KK2.0 terbang tidak stabil cenderung bergerak tak beraturan maka diperlukan pengaturan parameter-parameter kontrol PID yang ada dalam board KK2.0.
21
2. Struktur QuadcopterPada makalah ini, frame Quadcopter yang digunakan adalah model frame X-Copter seperti yang terlihat pada
Gambar 3. Kemudian frame Quadcopter tersebut dilengkapi dengan komponen-komponen Quadcopter seperti propeller, motor brushless, Electronic Speed Controller (ESC), flight controller. Semua komponen-komponen tersebut sifatnya spesifik untuk beberapa frame tertentu saja. Jadi jika diperlukan mengganti frame maka spesifikasi komponen-komponen yang diperlukan bisa jadi berubah. Detail komponen Quadcopter seperti propeller, motor brushless, Electronic Speed Controller (ESC), flight controller dapat dilihat pada Tabel 1. Skema pengabelan komponen-komponen tersebut jika digunakan standar pada umumnya dapat dilihat pada Gambar 4. Dapat dilihat bahwa sinyal keluaran dari penerima R/C alias RX masuk ke board KK2.0 sebanyak 4 kanal yaitu aileron, elevator, throttle, dan rudder.
Gambar 3. Frame X-Copter
Tabel 1. Spesifikasi Komponen Quadcopter
No Item Jumlah Merk Spek
1 Frame
X-Copter 1 Nylon SK-450 282 g
2 Propeller 2 CW,
2CCW Plastic 1038
3 BrushlessMotor 4 Turnigy SK3 1150KV
4 ESC 4 Turnigy Plush 30 A
5 Controller Flight 1 KK2.0
6 Baterai 1 Li-Po 3 cell 2.2 A
7 R/C 1 Turnigy 9XR 2.4 GHz
Sinyal dari 4 kanal yang diterima KK2.0 itu diolah dan selanjutnya menghasilkan sinyal pulsa untuk mengatur kecepatan masing-masing motor brushless dari 4 buah motor brushless melalui ESC. Pada Gambar 5 dapat dilihat skema pengabelan mode auto altitude lock. Sinyal keluaran RX hanya 3 kanal yang masuk board KK2.0 yaitu aileron, elevator, dan rudder. Kanal throttle dihubungkan ke board YoHe v1.1 ditambah 1 kanal aux sebagai sinyal masuk penanda pengaktif mode auto altitude lock. Dan 1 kanal dari board YoHe v1.1 keluar menuju KK2.0 menggantikan kanal throttle yangdari RX seperti skema sebelumnya. Board YoHe v1.1 menerima sinyal dari sensor sonar SRF05 sebagai acuan pengukur ketinggian.
Gambar 4. Skema Pengabelan Quadcopter General
22
3. Desain Sistem Kontrol FuzzySistem kontrol Fuzzy bisa diprogramkan dengan 2 media, yaitu diprogramkan on-board YoHe v1.1 atau diprogram dan dijalankan menggunakan laptop. Pada makalah ini didesain sistem kontrol Fuzzy dan diprogramkan ke board Yo-He v1.1 yang menggunakan ATMega2560 dengan kapasitas memori program sebesar 256 MB. Sistem kontrol Fuzzy dibuat dengan parameter-parameter yang fleksibel agar nantinya dengan mudah dilakukan perubahan-perubahan untuk mengoptimalkan performansi dari sistem kontrol yang dihasilkan. Dengan menggunakan pemrograman berbasis array, hal tersebut memungkinkan untuk dilakukan. Hal itulah yang membuat pada desain ini menggunakan ATMega2560 dengan memori program 256 MB.
Sebelum melangkah lebih lanjut desain sistem kontrol Fuzzy, alur eksekusi proses sistem kontrol altitude lock sebagai berikut. (1) Board Yo-He menerima sinyal penanda mode auto diaktifkan, (2) nilai pembacaan sensor sonar pertama kali saat mode auto diaktifkan dianggap sebagai posisi ketinggian Quadcopter yang diinginkan, (3) nilai pembacaan throttle terakhir saat mode auto diaktifkan dijadikan nilai throttle awal, (4) pembacaan sensor sonar saat ini dibandingkan dengan nilai ketinggian yang diinginkan menjadi error (E) dan delta error (dE). Nilai E dan dE tersebut menjadi input sistem kontrol Fuzzy, (5) proses kalkulasi Fuzzy dijalankan, (6) didapatkan nilai throttle dari proses kalkulasi dikirimkan ke board KK2.0 untuk diolah menjadi kecepatan 4 buah motor brushless. Struktur sistem kontrol Fuzzy dapat dilihat pada Gambar 6.
Gambar 6. Struktur Sistem Kontrol Fuzzy (Dadone, Vanlandingham, Baumann, & Sarin, 2001)
Bagian pertama desain sistem kontrol Fuzzy adalah fuzzifier. Di dalam fuzzifier dilakukan proses fuzzification yang mengubah crisp (nilai real) input menjadi sebuah Fuzzy sets. Dari ulasan sebelumnya didapatkan 2 buah Fuzzy sets yaitu Fuzzy sets E dengan linguistic variables Error dan Fuzzy sets dE dengan linguistic variables delta Error. Setelah dilakukan percobaan pendahuluan Fuzzy sets dE ditetapkan hanya memiliki 3 linguistic labels, yaitu NdE (Negative delta Error), ZdE (Zero delta Error), PdE (Positive delta Error). Fuzzy sets dE memiliki membership function µ(dE) dengan membership degree dari 0 hingga 1. Sedangkan Fuzzy sets E dibuat bervariasi untuk dicari performansi terbaik mulai 3 linguistic labels, 5, 7, dan seterusnya. Untuk Fuzzy sets E dengan 3 linguistic labels ditentukan berikut ini, yaitu NE (Negative Error), ZE (Zero Error), PE (Positive Error). Fuzzy sets E memiliki membership function µ(E) dengan membership degree dari 0 sampai 1. Grafik membership function dari Fuzzy sets dE dan Fuzzy sets E dapat dilihat pada Gambar 7. Bentuk membership function dari kedua Fuzzy sets adalah trapezoid-triangular membership function.
23
Gambar 7. Grafik Membership Function dE dan E
Gambar 8. Grafik Membership Function STPdT
Tabel 2. IF-THEN Rules
Bagian berikutnya adalah Inference dan rule base. Pada Tabel 2 dapat dilihat konfigurasi rule base atau juga IF-THEN Rules. Pada bagian terakhir yaitu defuzzifier terdapat proses defuzzification yang mengubah Fuzzy sets kembali menjadi nilai crisp output. Pada makalah ini menggunakan metode Center Of Area (COA) dengan persamaan seperti terlihat pada persamaan (1).
(1)
4. Analisis Performansi Sistem Kontrol Fuzzy
Seperti diketahui bersama bahwa pengaturan poin-poin pada proses fuzzification, pengaturan rule base atau IF-THEN Rules membutuhkan tingkat expertise manusia yang mendesain Fuzzy tersebut. Dalam analisis performansi sudah dilakukan lebih dari 100 kali perubahan baik perubahan poin-poin di trapezoid input membership function dan juga pada konfigurasi sistem rule base. Berikut beberapa kombinasi perubahan yang dilakukan yang terbaik. Dari Gambar 11 dapat dilihat kofigurasi terbaik menghasilkan perbedaan antara tinggi maksimum dan tinggi minimum sebesar 19 cm. Jadi Quadcopter terbang dengan ketinggian sebesar ketinggian target ± 8.5 cm. Kemudian dilanjutkan dengan pengoptimalan besar poin-poin Fuzzy Singleton STPdT didapatkan perbaikan dengan ketinggian terbang sekarang adalah ketinggian target ± 7 cm seperti terlihat pada Gambar 12. Ketika banyaknya linguistic labels diperbanyak menjadi 5 dengan harapan hasil menjadi lebih baik, namun yang didapatkan sebaliknya semakin buruk osilasinya. Hal itu juga dikonfirmasi dengan mencoba ketika linguistic labels menjadi 7. Cuma tidak diteliti lebih lanjut penyebab semakin buruknya ini.
24
Gambar 10. Empat Konfigurasi Optimasi Poin Fuzzy Singleton STPdT (Terbaik Warna Kuning)
5. Simpulan
Dengan konfigurasi parameter-parameter sistem kontrol Fuzzy di atas didapatkan desain altitude lock untuk Quadcopter menggunakan sensor sonar berhasil mempertahankan ketinggian terbang Quadcopter ± 7 cm dari ketinggian awal mode altitude lock diaktifkan. Dan hasil ini jika dilihat dalam pandangan visual langsung memang terlihat Quadcopter terbang stabil diam tidak naik turun.
Gambar 11. Hasil Optimasi Poin Fuzzy Sets E Gambar 12. Hasil Optimasi Poin Fuzzy Singleton STPdT
Daftar Pustaka
1. Bouabdallah, S., Murrieri, P., & Siegwart, R. (2004). Design and control of an indoor micro quadrotor. IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA ‟04. 2004, 4393–4398 Vol.5. doi:10.1109/ROBOT.2004.1302409 2. Dadone, P., Vanlandingham, H. F., Baumann, W. T., & Sarin, S. C. (2001). Design
Optimization of Fuzzy Logic Systems. Virginia Polytechnic Institute and State University.
25
Analisis Kualitas Portal Rumah Belajar
Dengan Menggunakan Metode
WebQual
4.0
(Studi Kasus Pada SMA Negeri di kota Palembang)
Megawaty1, Helda Yudiastuti 2 1
Universitas Bina Darma, Jl. A. Yani No.12, [email protected] 2
Universitas Bina Darma, Jl. A. Yani No.12, [email protected]
ABSTRAK
Perkembangan ilmu pengetahuan dan teknologi (IPTEK) yang sangat pesat telah membuat banyak perubahan bagi kehidupan manusia saat ini dan mendorong upaya-upaya pembaharuan dalam pemanfaatan hasil-hasil teknologi dalam proses belajar mengajar disekolah. Untuk itulah pemerintah terus mengupayakan pemberdayaan potensi internet untuk kebutuhan pendidikan. Salah satu upaya yang dikembangkan adalah membuat portal edukasi untuk pembelajaran, salah satu diantaranya adalah E-dukasi.Net yang kini sudah berganti nama menjadi Rumah Belajar. Dalam penelitian ini, kualitas Portal Edukasi Rumah Belajar akan diukur dengan menggunakan metode WebQual. WebQual merupakan instrument yang menilai kualitas suatu website menurut perspektif pengguna akhir. Teknik pengambilan sample pada penelitian ini menggunakan teknik purposive sampling yaitu teknik sampling yang digunakan peneliti karena adanya pertimbangan-pertimbangan tertentu, sampel diambil dari 150 orang siswa dan 50 orang guru. Survey dilakukan dengan wawancara dan memberikan kuesioner secara terbuka serta tertutup kepada siswa-siswi dan guru-guru di SMA yang telah ditentukan sebelumnya. Analisis regresi linier berganda digunakan untuk menguji hubungan antar dimensi dari webQual 4.0 yaitu usability, kualitas informasi, dan interaksi pelayanan terhadap kepuasan pengguna, pengukuran dilakukan dengan perangkat SPSS versi 19. Dari pengukuran, nantinya diharapkan akan dapat memberikan manfaat sebagai rekomendasi bagi pemerintah dalam mengembangkan situs Edukasi.Net dengan memperhatikan kualitas website berdasarkan persepsi pengguna.
Kata kunci: WebQual 4.0, Kepuasan, Rumah Belajar, Pengguna 1. Pendahuluan
26
Perumusan MasalahMasalah yang akan di bahas dalam penelitian ini adalah
1. Apakah kegunaan (Usability) berpengaruh positif terhadap kepuasan pengguna. 2. Apakah kualitas informasi berpengaruh positif terhadap kepuasan pengguna. 3. Apakah interaksi kualitas layanan berpengaruh positif terhadap kepuasan
pengguna.
Tujuan penelitian
Adapun tujuan dari penelitian ini adalah untuk Menganalisis dan mengetahui tingkat kepuasan pengguna Portal Rumah Belajar menggunakan metode WebQual 4.0 yang terdiri atas usability, kualitas informasi, dan interaksi pelayanan
Pembahasan Objek Penelitian
Objek Penelitian adalah sesuatu yang menjadi pusat pada penelitian, adapun yang menjadi objek pada penelitian ini adalah siswa-siswa dan guru yang memanfaatkan Portal Rumah Belajar pada SMA negeri di kota Palembang.
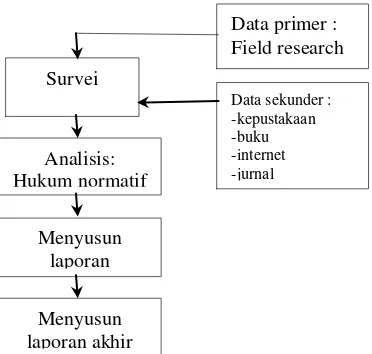
Metode Penelitian
Metode yang digunakan dalam penelitian ini adalah metode penelitian deskriptif kuantitatif. Menurut Nawawi (2003 : 64) metode deskriptif yaitu metode-metode penelitian yang memusatkan perhatian pada masalah-masalah atau fenomena yang bersifat aktual pada saat penelitian dilakukan, kemudian menggambarkan fakta-fakta tentang masalah yang diselidiki sebagaimana adanya diiringi dengan interprestasi yang rasional dan akurat.
Teknik Pengambilan Sample
Guru menggunakan metode purposive sampling yaitu teknik sampling yang digunakan peneliti karena adanya pertimbangan-pertimbangan tertentu, jadi responden diambil sebanyak 50 orang guru. Sedangkan pada siswa yaitu meliputi keseluruhan siswa kelas X pada masing-masing sekolah yang berjumlah 1440 orang. Sampel menurut Arikunto (2004:102) adalah keseluruhan dari populasi yang diambil dengan menggunakan data tertentu. Teknik pengumpulan data dengan melakukan wawancara, kuesioner, observasi.
Alat Instrumen Penelitian
Instrumen pengumpulan data adalah alat bantu yang dipilih dan digunakan oleh peneliti dalam kegiatannya mengumpulkan data agar kegiatan tersebut menjadi sistematis dan mudah, olehnya penelitian ini menggunakan Skala Likert sebagai pedoman penafsiran.
Teknik Analisa data dalam penelitian ini adalah Regresi Linier Berganda karena variabel independen yang digunakan lebih dari satu variabel.
Alat bantu yang digunakan untuk mengolah data adalah SPPS versi 17.0 karena program ini memiliki kemampuan analisis statistik cukup tinggi serta sistem manajemen data pada lingkungan grafis menggunakan menu-menu deskriptif dan kotak-kotak dialog sederhana sehingga mudah dipahami cara pengoperasiannya (Sugianto, 2007: 1).
Uji Validitas Instrumen
Konstruk Item Corrected Item-Total
Correlation
Usability U1 0.478*
U2 0.556*
U3 0.456*
27
U5 0.502*
U6 0.083
U7 0.404*
U8 0.370*
U9 0.494*
Information Quality q1 0.209
q2 0.072
q3 0.218
q4 0.226
q5 0.101
q6 0.150
q7 0.214
q8 0.176
Layanan Interaksi L1 0.673*
L2 0.670*
L3 0.561*
L4 0.585*
L5 0.092
L6 0.600*
Kepuasan Pengguna KP1 0.101
KP2 0.547*
KP3 0.673*
r tabel = 0.195
Keterangan : * dinyatakan Valid Sumber: Data Primer diolah, 2014
Uji Reliabilitas
Uji Reliabilitas dilakukan untuk mengukur apakah instrumen yang digunakan benar-benar bebas dari kesalahan (error). Dengan bantuan program SPSS 17.0 nilai koefisien Cronbach Alpha dapat dilihat. Nilai koefisien Cronbach Alpha untuk masing-masing konstruk ditampilkan sebagai berikut:
Uji Normalitas
Uji normalitas dilakukan dengan tujuan untuk mengetahui apakah model garis regresi, variabel terikat dan variabel bebas memiliki distribusi data normal atau mendekati normal.
Uji Signifikansi Simultan (Uji F)
28
Tabel 5.14 ANOVA
ANOVAb
Model
Sum of
Squares df Mean Square F Sig.
1 Regression 33.981 3 11.327 115.529 .000a
Residual 16.766 171 .098
Total 50.747 174
a. Predictors: (Constant), Layanan_Interaksi, Information_Quality, Usability b. Dependent Variable: Kepuasan_Pengguna
Sumber: Data Primer diolah, 2014
Dari hasil uji ANOVA atau F test didapat F hitung sebesar 115.529 dengan tingkat signifikansi uji F sebesar 0.000 ( p < 0.05) berarti variabel secara bersama-sama mempunyai pengaruh yang signifikan terhadap Kepuasan Pengguna .
5.3.1 Pengujian Secara Parsial (Uji t)
Uji signifikansi parameter individual (uji t) dilakukan untuk menguji signifikansi konstanta dan variabel bebas yang terdapat secara individu apakah berpengaruh terhadap nilai variabel terikat. Untuk pengujian ini dilakukan dengan melihat probabilitas uji parsial pada tabel koefisien signifikan pada tabel output Anova. Jika nilai probabilitas kurang dari 0,05 maka hipotesis nol ditolak, sebaliknya hipotesis alternatif yang diajukan dalam penelitian ini dapat diterima pada tingkat signifikansi 5%.
Tabel 5.14 Koefisien Regresi
Coefficientsa
Model
Unstandardized Coefficients
Standardize d Coefficients
t Sig.
B Std. Error Beta
1 (Constant) .911 .505 1.803 .073
Usability .022 .054 .019 .405 .686
Information_Quality .146 .123 .053 1.184 .238
Layanan_Interaksi .660 .038 .805 17.413 .000
a. Dependent Variable: Kepuasan_Pengguna
3. Kesimpulan
Penelitian ini dilakukan di SMA negeri di kota Palembang yang terkoneksi jaringan internet. Berdasarkan hasil penelitian dan pembahasan diatas, maka dapat ditarik beberapa kesimpulan sebagai berikut:
1. Faktor Usability tidak berpengaruh positif terhadap Kepuasan Pengguna Portal Rumah Belajar diperoleh sebesar 4.05% dengan tingkat signifikansi 0,686. Dari hasil penelitian tersebut menjelaskan bahwa faktor usability tidak berpengaruh positif terhadap penerimaan pengguna. Sehingga apabila tingkat kegunaan (usability) yang dirasakan pengguna rendah maka akan berpengaruh pada tingkat Kepuasan.
29
(Information Quality) tidak berpengaruh positif terhadap Kepuasan pengguna. Sehingga apabila tingkat Kualitas Informasi yang dirasakan pengguna rendah maka akan berpengaruh pada tingkat Kepuasan.
3. Faktor layanan Interaksi berpengaruh positif terhadap Kepuasan Pengguna Portal Rumah Belajar. diperoleh sebesar 174.13% dengan tingkat signifikansi 0.000. Dari hasil penelitian tersebut menjelaskan bahwa faktor Laynan Interaksi berpengaruh positif terhadap Kepuasan Pengguna Portal Rumah Belajar. Sehingga apabila tingkat layanan Interaksi yang dirasakan pengguna tinggi maka akan berpengaruh pada tingkat Kepuasan.
SARAN
Saran-saran yang diajukan dalam penelitian ini sehubungan dengan hasil penelitian adalah sebagai berikut:
1. Diharapkan dengan hasil penelitian ini dapat dijadikan acuan pihak yang berwenang baik itu pemerintah maupun sekolah-sekolah untuk melakukan perbaikan-perbaikan terhadap Portal Rumah Belajar dan dilakukan sosialisasi mengenai kegunaan portal rumah belajar bagi guru dan siswa . karena dengan dimanfaatkannya Portal Rumah Belajar secara optimal oleh siswa dan guru berdampak pada semakin meningkatnya peranan teknologi informasi dan komunikasi (TIK) dalam berbagai aspek kehidupan termasuk di bidang pendidikan. 2. Penelitian-penelitian lanjutan sehubungan kegunaan Portal rumah belajar untuk
mengetahui kepuasan pengguna portal rumah belajar di sekolah secara lebih luas dimana akan didapatkan evaluasi dalam rangka pengembangan dan sekaligus feedback yang tepat sebagai solusi atas permasalahan kepuasan pengguna terhadap program tersebut.
Daftar Pustaka
1. Barnes S, idgen, R. 2001. Assesing the Quality of Auction Website. 34th Hawaii International Conference on System Sciences.
2. Handini. 2009. Pengukuran Mutu layanan Perpustakaan Perguruan Tinggi dengan Menggunakan Metode WebQual (Studi Kasus : Web Library Perguruan Tinggi Swasta dan Perguruan Tinggi Negeri). Jakarta : Universitas Guna Darma.
3. Imam Sanjaya. 2012. Pengukuran Kualitas Layanan Website Kementerian Kominfo Dengan Menggunakan Metode Webqual 4.0 Jurnal Penelitian IPTEK-KOM. Vol.14 No.1
4. Kusnandar,Uwes A. Chaeruman, & Ika Kurniawati. Studi Pemanfaatan E-Dukasi.Net di Sekolah(2005)
5. Kementrian Pendidikan dan Kebudayaan ‖ Pusat Teknologi Informasi dan
Komunikasi Pendidikan‖. 1 Juli 2014.
http://setjen.kemdikbud.go.id/pustekkom/produk/rumah-belajar,
6. Tarigan, J. 2008. User Satisfaction Using WebQual Instrument : A Research on Stock Exchange of Thailand (SET). Jurnal Akuntansi dan Keuangan. Vol.10 No.1 :34 – 47
30
Sistem Pendukung Keputusan Pemilihan Tenaga Kerja Pada Maid
Management Information System Berbasis Web
Menggunakan Logika Fuzzy
Radius Tanone1, Dedy Danu Widjaya 2 1
FTI-UKSW, Jl. Diponegoro 52-60, Salatiga 50771, Indonesia, [email protected] 2
FTI-UKSW, Jl. Diponegoro 52-60, Salatiga 50771, Indonesia, [email protected]
ABSTRAK
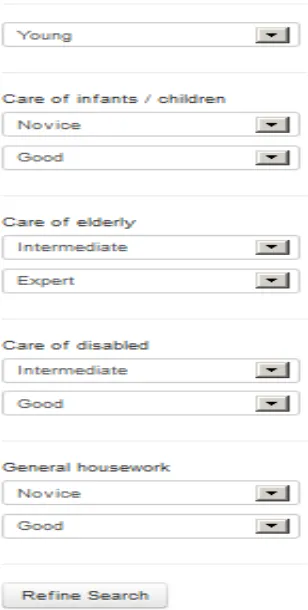
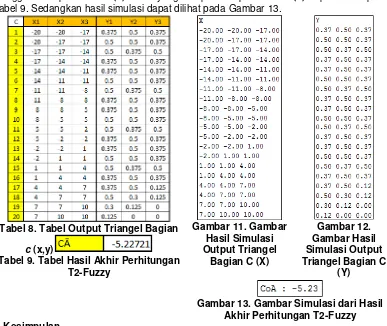
Besarnya kebutuhan masyarakat Singapura akan tenaga kerja wanita yang terus meningkat , mendorong tumbuhnya agen Maid serta sistem informasi Maid management di negara tersebut. Untuk pemilihan Maid yang tepat dan sesuai kriteria yang diinginkan employer, dibutuhkan suatu sistem pendukung keputusan yang dapat menghasilkan suatu rekomendasi yang valid. SPK harus dapat memproses indikator yang ada dengan benar termasuk yang bersifat samar seperti pada Maid management adalah kriteria experience dan skill dari tenaga kerja serta umur dari maid. Indikator samar tersebut diproses menggunakan logika Fuzzy dengan representasi grafik segitiga dan operasi logika max untuk menghasilkan rekomendasi Maid yang telah diurutkan dari yang memiliki firestrength tertinggi.
Kata Kunci : Maid Management, Sistem Pendukung Keputusan, Logika Fuzzy
1. Pendahuluan
Dalam era globalisasi yang semakin berkembang, semua aspek kehidupan manusia juga ikut berkembang, salah satunya adalah dunia bisnis. Peran teknologi dan informasi pun semakin diperlukan dalam mendukung proses bisnis yang ada, salah satunya adalah sistem informasi. Begitu juga dengan sistem informasi maid management yang memberikan layanan dan informasi seputar tenaga kerja bagi customer khususnya di wilayah Singapura. Permasalahan yang terjadi bagi masyarakat Singapura dalam pemilihan maid adalah customer harus mencari tenaga kerja yang sesuai dengan kriteria yang diharapkan. Sedangkan tenaga kerja yang tersedia sangat bervariatif dalam segi pengalaman, umur dan kemampuanya, tidak kurang tiga ribu orang setiap bulannya berangkat ke Singapura untuk berkerja sebagai maid serta ditambah lagi dengan proses dan pengurusan legalitas yang selektif oleh pemerintah Singapura dalam pengambilan tenaga kerja wanita bagi warga negaranya [1].
Gambar
![Gambar 1. Prototyping Model [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1111628.647946/33.595.191.444.247.395/gambar-prototyping-model.webp)


Garis besar
Dokumen terkait
Sistem inferensi fuzzy Tsukamoto, merupakan sebuah aturan yang setiap konsekuennya berbentuk IF-Then harus direpresentasikan dengan suatu himpunan fuzzy dengan
Pada sistem ini, setiap variabel fuzzy menggunakan fungsi keanggotaan trapesium sebagai pendekatan untuk memperoleh derajat keanggotaan suatu nilai dalam
Dari sistem kendali suhu otomatis menggunakan metode logika fuzzy yang telah dibuat, dengan menggunakan 5 himpunan fuzzy pada variabel E (Error) yang berupa
Dari sistem kendali suhu otomatis menggunakan metode logika fuzzy yang telah dibuat, dengan menggunakan 5 himpunan fuzzy pada variabel E (Error) yang berupa
Dalam menentukan jumlah armada yang dibutuhkan untuk melayani suatu trayek dalam sistem angkutan umum terdapat beberapa variabel utama yang perlu diketahui yaitu volume/frekuensi,
Himpunan Fuzzy merupakan suatu group yang mewakili suatu kondisi atau keadaan tertentu dalam suatu variabel Fuzzy. Pada himpunan Fuzzy, nilai keanggotaan terletak
mengetahui Himpunan fuzzy dan bahasa alami, operasi dalam himpunan fuzzy, Relasi fuzzy, Variabel linguistik, prinsip ekstensi,logika fuzzy,aturan fuzzy komposisi max-min, metode
22 Dengan keterangan : Ri : aturan fuzzy ke-i i=1…m Xij : bobot variabel nilai jaminan ke-j yang relevan dengan aturan yang ke-i Aij : himpunan fuzzy untuk setiap variabel
