B-171
IDENTIFIKASI PARAMETER PLANT
BERDASARKAN KARAKTERISTIK RESPON TRANSIENT Fiktor Sihombing1
1)Program Studi Teknik Elektro Fakultas Teknik Universitas HKBP Nommensen, Medan
Jl. Sutomo No. 4A Telepon (061)4522922;4522831 Fax 4571426 Medan 20234
E-mail : [email protected]
ABSTRAK
Sistem adalah sekumpulan elemen/komponen-komponen fisik yang dihubungkan atau berhubungan satu sama lain sedemikian rupa, sehingga membentuk satu kesatuan atau keseluruhan yang bekerja bersama-sama untuk tujuan tertentu, dan didalamnya timbul pengendalian. Elemen/komponen sistem kendali akan selalu di analisis dan disain untuk memperoleh spesifikasi yang diinginkan. Untuk melakukan analisis dan disain sistem kendali, maka syarat minimum yang harus diketahui adalah fisik plant dalam model matematis, di mana model matematis tersebut harus mendekati model fisik yang sebenarnya. Model matematis dari fisik plant pada umumnya dalam bentuk model persamaan matematis fungsi transfer atau dalam bentuk persamaan state space. Metodologi menentukan model matematis fisik plant adalah tersedianya rangkaian skematiknya dan mengetahui parameter-parameter plant. Akan tetapi sering hal ini tidak ditemukan lagi. Oleh karenanya untuk memodifikasi atau mendisain elemen/komponen pengendali untuk tujuan memperoleh spesifikasi sistem tertentu akan sulit dilakukan. Mencari model matematis plant yang tidak diketahui lagi parameternya, dengan melalakukan pengujian dan analisis, menentukan karakteristik respon transient sistem orde kedua, merupakan suatu cara yang dapat dilakukan untuk mengidentifikasi parameter-parameter plant.
Kata Kunci : Karakteristik Respon Transient, Model Matematis, Identifikasi Parameter, Analisis dan Disain
PENDAHULUAN
Masalah teknik sistem kendali adalah analisis dan disain. Analisis adalah untuk menyelidiki sifat-sifat dari suatu sistem yang ada, sedangkan disain adalah pemilihan dan penyusunan komponen sistem yang melaksanakan fungsi/tugas tertentu.
Analisis dan disain sistem kendali akan selalu dilakukan untuk memenuhi spesifikasi yang diinginkan. Spesifikasi adalah karakteristik performansi yang dikehendaki.
Analisis sistem kendali adalah penelitian pada kondisi performansi sistem, yang model matematiknya diketahui dan disain sistem kendali adalah mencari suatu sistem yang dapat menyelesaikan tugas, yang spesifikasinya diberikan. Pada umumnya prosedur analisis dan disain tidak diperoleh secara langsung tetapi memerlukan metoda coba-coba.
Permasalahan utama dari analisis dan disain sistem kendali adalah apakah diketahui dinamika sistem dalam bentuk model matematis, seperti dalam bentuk fungsi transfer atau dalam bentuk persamaan state space. Jika parameter plant tidak diketahui maka identifikasi parameter plant harus dilakukan. yang menjadi pertanyaan adalah bagaimana melakukan identifikasi parameter. Peran sains dan teknologi seperti ini oleh institusi perguruan tinggi sangat penting dikaji dengan melakukan penelitian dan ditindaklanjuti dalam bentuk kerjasama, dengan demikian akan dicapai kemajuan bersama.
Analisis dan disain sistem kendali dilakukan, jika diinginkan spesifikasi sistem. Analisis dan disain sistem dapat dilakukan apabila diketahui model matematis. Model matematis sistem (plant) tidak akan dapat diperoleh apabila nilai parameter plant tidak diketahui, dengan demikian untuk memodifikasi atau disain sistem untuk bekerja sesuai spesifikasi yang diinginkan tidak akan mungkin dapat dilakukan. Hal seperti ini menjadi suatu permasalahan yang harus dicari solusinya. Maka salah satu teknik yang memungkinkan, untuk memperoleh model matematis suatu plant adalah melakukan identifikasi parameter, dengan pengujian dan menentukan parameter karakteristik respon transient sistem orde kedua.
Memperoleh model matematis suatu plant dalam bentuk fungsi transfer dengan metodologi identifikasi parameter berdasarkan karakteristik respons transient. Dengan demikian dapat dilakukan analisis dan disain terhadap suatu sistem yang tidak diketahui lagi parameter plantnya, untuk memperoleh spesifikasi sistem yang diinginkan.
B-172 METODE
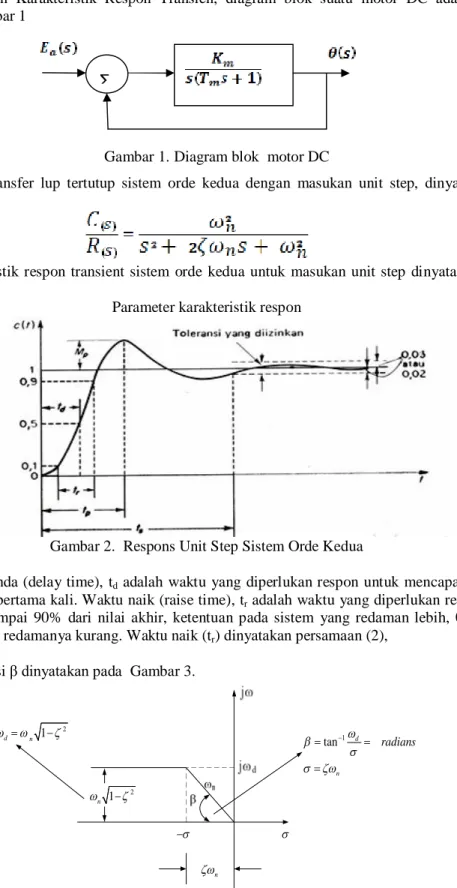
Diagram blok dan Karakteristik Respon Transien, diagram blok suatu motor DC adalah seperti ditunjukkan Gambar 1
Fungsi transfer lup tertutup sistem orde kedua dengan masukan unit step, dinyatakan oleh persamaan (1),
(1) Karakteristik respon transient sistem orde kedua untuk masukan unit step dinyatakan seperti Gambar 2
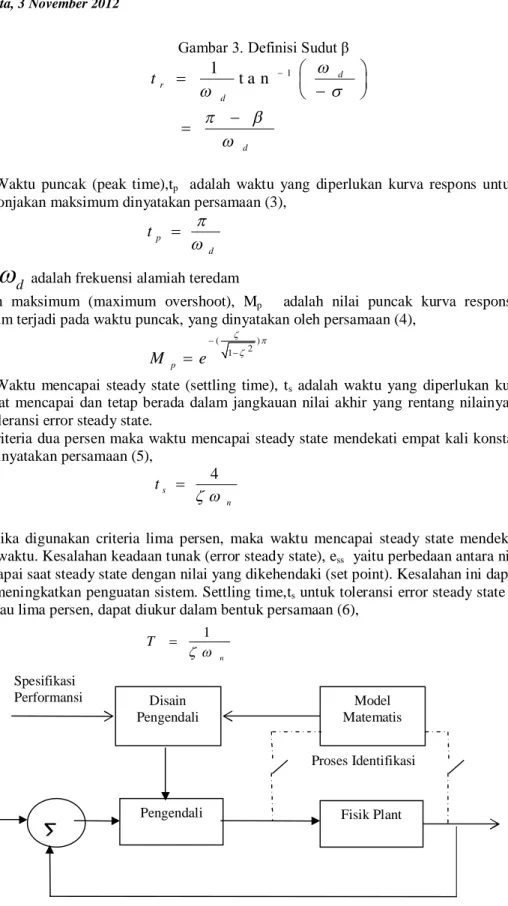
Parameter karakteristik respon
Gambar 2. Respons Unit Step Sistem Orde Kedua
Waktu tunda (delay time), td adalah waktu yang diperlukan respon untuk mencapai 50% dari nilai akhir untuk pertama kali. Waktu naik (raise time), tr adalah waktu yang diperlukan respon untuk naik dari 10% sampai 90% dari nilai akhir, ketentuan pada sistem yang redaman lebih, 0% sampai 100% pada sistem redamanya kurang. Waktu naik (tr) dinyatakan persamaan (2),
Sedangkan definisi β dinyatakan pada Gambar 3.
2 1 n 1 tan d n radians 2 1 d n n Ʃ
B-173
Gambar 3. Definisi Sudut β
1
1
t a n
d r d dt
(2) Waktu puncak (peak time),tp adalah waktu yang diperlukan kurva respons untuk mencapai puncak lonjakan maksimum dinyatakan persamaan (3),p d
t
(3) di mana
d adalah frekuensi alamiah teredamLonjakan maksimum (maximum overshoot), Mp adalah nilai puncak kurva respons. Lonjakan maksimum terjadi pada waktu puncak, yang dinyatakan oleh persamaan (4),
( ) 2 1 p M e (4) Waktu mencapai steady state (settling time), ts adalah waktu yang diperlukan kurva respons agar dapat mencapai dan tetap berada dalam jangkauan nilai akhir yang rentang nilainya dinyatakan dalam toleransi error steady state.
Untuk kriteria dua persen maka waktu mencapai steady state mendekati empat kali konstantan waktu seperti dinyatakan persamaan (5),
4 s n t (5) Jika digunakan criteria lima persen, maka waktu mencapai steady state mendekati tiga kali konstan waktu. Kesalahan keadaan tunak (error steady state), ess yaitu perbedaan antara nilai keluaran yang dicapai saat steady state dengan nilai yang dikehendaki (set point). Kesalahan ini dapat dikurangi dengan meningkatkan penguatan sistem. Settling time,ts untuk toleransi error steady state sebesar dua persen atau lima persen, dapat diukur dalam bentuk persamaan (6),
1
n T
(6)
Dengan mengetahui respons keluaran plant dan menentukan karakteristik respon transient, maka dapat diketahui parameter-parameter suatu plant, dengan demikian ditahui model matematis dalam bentuk fungsi transfer.
Disain Pengendali Spesifikasi Performansi
Ʃ
Pengendali Model Matematis Fisik PlantGambar 4. Prinsip Disain dan Identifikasi Proses Identifikasi
B-174
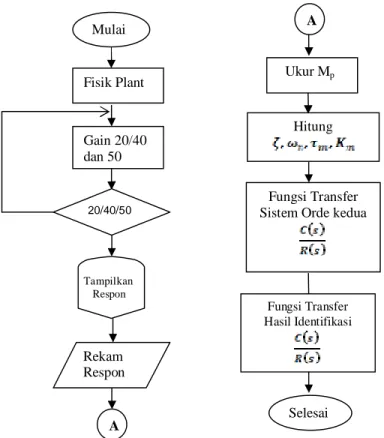
Disain dan Identifikasi, alasan disain dan identifikasi parameter plant untuk memperoleh model matematis plant, dinyatakan pada Gambar 4, sedangkan diagram alir proses identifikasi parameter plant ditunjukkan pada Gambar 5.
PEMBAHASAN
Melakukan pengujian terhadap fisisk plant di laboratorium, dengan mengatur gain, untuk Kp = 20 , Kp = 40 dan Kp = 50. Fisik plant adalah sebuah motor servo DC. Respons keluaran plant ditunjukkan Gambar 6, 7 dan 8.
Respon keluaran yang diperoleh pada pemberian gain Kp = 20
Gambar 6. Respon transien untuk Kp=20 Respon keluaran yang diperoleh pada pemberian gain Kp = 40
Mulai Fisik Plant Gain 20/40 dan 50 20/40/50 Rekam Respon Ukur Mp A A Hitung Fungsi Transfer Sistem Orde kedua
Fungsi Transfer Hasil Identifikasi
Selesai
Gambar 5. Diagram Alir Proses Identifikasi
Tampilkan Respon
B-175
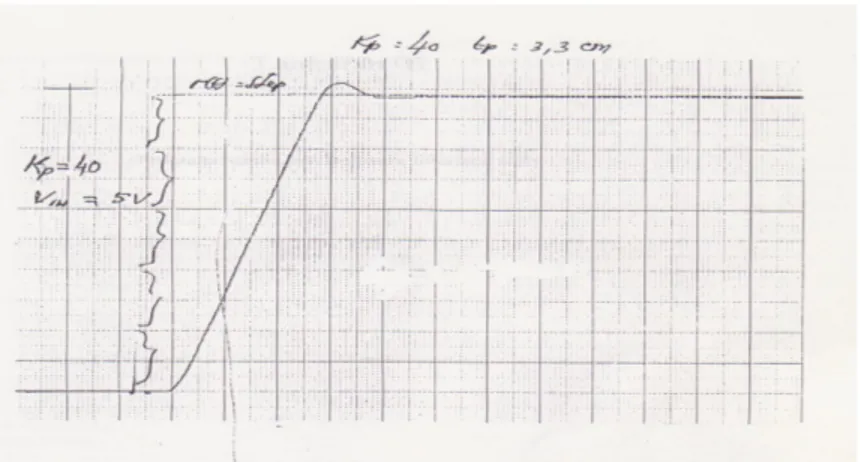
Gambar 7. Respon transien untuk Kp = 40 Respon keluaran yang diperoleh pada pemberian gain Kp = 50
Gambar 8. Respon transien untuk Kp = 50
Dari respon hasil pengujian pada Gambar 6. untuk Kp = 20 menunjukkan bahwa, Maksimum overshoot (Mp) adalah = 0,0292 pada peak time (tp ) = 0,875 detik. Maka untuk memperoleh nilai parameter faktor redaman ( ) digunakan persamaan (4)
Mp = Atau, = 0,0292 Maka
B-176
Dari definisi pada Gambar 3, maka frekuensi Alamiah tak teredam,
Dari diagram blok motor DC Gambar 1, bahwa fungsi transfer lup tertutup adalah,
Di mana, adalah konstanta gain motor dan adalah konstanta waktu motor. Dapat dituliskan hubungan ζ dan
; =
Mempedomani fungsi transfer lup tertutup sistem orde kedua dengan masukan unit step, yang dinyatakan oleh persamaan (1), Maka diperoleh fungsi transfer hasil identifikasi pada Kp = 20, adalah seperti persamaan (7),
(7) Dari respon hasil pengujian pada Gambar 7, untuk Kp = 40 menunjukkan bahwa, Maksimum overshoot (MP) adalah =0,036 pada peak time (tp) = 0,825 detik. Maka,
Mp =
= 0,0336 dimana ζ = 0,743 ; n = = 5,688
= 0,118 ; = =0,095
Mempedomani fungsi transfer lup tertutup sistem orde kedua dengan masukan unit step, yang dinyatakan oleh persamaan (1), Maka diperoleh fungsi transfer hasil identifikasi pada Kp = 40, adalah seperti persamaan (8),
(8)
Dari respon hasil pengujian pada Gambar 8, untuk Kp = 50 menunjukkan bahwa, Maksimum overshoot (MP) adalah =0,0313 pada peak time (tp) = 0,750 detik. Maka,
Mp = maka, = 0,0313; ζ = 0
n = ; = 1,08; = = 0,839 Mempedomani fungsi transfer lup tertutup sistem orde kedua dengan masukan unit step, yang dinyatakan oleh persamaan (1), Maka diperoleh fungsi transfer hasil identifikasi pada Kp = 50, adalah seperti persamaan (9),
B-177
(9) MATrix LABoratory, analisis terhadap model matematis fungsi transfer lup tertutup hasi identifikasi, MATrix LABoratory programnya adalah sebagai berikut:
disp('Fungsi Transfer persamaan (7),(8),(9)')
num1=29.2; den1=[1 8.07 29.2]; num2=32.4; den2=[1 8.452 32.4]; num3=38.9; den3=[1 9.24 38.9]; t=0:0.01:3; [y1,x1,t]=step(num1,den1,t) [y2,x2,t]=step(num2,den2,t) [y3,x3,t]=step(num3,den3,t) plot(t,y1,t,y1,'.-',t,y1,t,y1,'o',t,y1,t,y1,'-') title('Respon persamaan (7)(8),(9)') xlabel('Waktu (detik)') ylabel('Keluaran c(t)') grid 0 0.5 1 1.5 2 2.5 3 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Respon persamaan (7)(8),(9) Waktu (detik) O u tp u t y (t )
Gambar 9. Respon Persamaan (7),(8),(9) KESIMPULAN
Berdasarkan respon pengujian dan perhitungan parameter karakteristik respon transient, dapat di identifikasi model matematis plant dalam bentuk fungsi transfer lup tertutup. Fungsi transfer yang mewakili fisik plant, sesuai hasil analisis program, dapat disimpulkan bahwa, fungsi transfer loop tertutup motor DC dapat dipilih salah satu diantara ketiga fungsi transfer lup tertutup tersebut, apakah persamaan (7), (8) atau (9), karena karakteristik respon transient ketiga persamaan tersebut mendekati sama.
DAFTAR PUSTAKA
Bahram Shahian, Control System Design Using Matlab, Prentice -Hall International Editions, London, 1993
D’azzo, JJ and Houpis, CH. Control System Analysis and Synthesis” Second Edition McGraw Hill Ioan Dore Landau, System Identification and Control Design, Prentice -Hall
James R. Rowland, ”Linear Control Systems : Modeling, Analysis, and Design, John Wiley & Sons, 1986
B-178
John J. D’ Azzo “ Feedback Control Systems Analysis and Syntesis, Second Eddition. Mc Graw-Hill International Book Company
Gupta, SC and Hasdorff L” Fundamentals of Automatic Control” John Wiley & Sons, 1970
Katsuhiko Ogata ” Modern Control Enggineering” Third Edition. Prentice Hall International. Inc 1997
Katsuhiko Ogata ” Modern Control Enggineering” Second Edition. Prentice Hall International. Inc 1970