PAGE 1
BP2IP TANGERANG | ATT-III | January 1, 2015
MEKANIKA TERAPAN
i
KATA PENGANTAR
Puji syukur kami panjatkan kehadirat Allah SWT Tuhan Yang Maha Esa, atas segala rahmat dan karunianya sehingga kami dapat menyelesaikan buku Mekanika Terapan Untuk Teknika ini dengan baik.
Buku ini disusun berdasarkan kurikulum dan silabus dari International Maritime Organisation sebagaimana termuat dalam IMO Model Course 7.04 tentang Officer in Charge of an Engineering Watch. Materi yang disusun dalam buku ini dibuat ringkas tetapi lengkap dan disertai contoh-contoh soal dengan penyelesaiannya supaya memudahkan pembaca untuk memahami materi.
Semoga buku ini dapat bermanfaat bagi pengajar, siswa/taruna dan para pembaca untuk memahami dan menguasai konsep-konsep dasar mekanika maupun penerapannya dalam kehidupan sehari-hari khususnya dalam mempelajari materi-materi produktif teknika kapal. Kritik dan saran dibuka seluas-luasnya untuk perbaikan buku ini dalam edisi mendatang.
ii
DAFTAR ISI
BAB I STATIKA ... 1
1.1 Vektor Gaya
1.2 Resultan Gaya
1.3 Komponen Gaya
1.4 Momen Gaya
1.5 Kopel
1.6 Titik Berat dan Centroid
BAB II DINAMIKA ... 39
2.1 Kecepatan dan Efek Perubahan Arah 2.2 Harga Sesaat
2.3 Perubahan Kecepatan
2.4 Kecepatan Relatif
2.5 Gaya Gesek
BAB III HIDROSTATIKA ... 67
3.1 Tekanan
3.2 Hukum Pascal
3.3 Prinsip Archimedes
BAB IV HIDRODINAMIKA ... 84
4.1 Pengertian Debit 4.2 Persamaan Kontinuitas 4.3 Asas Bernoulli
iii PENGENALAN SATUAN SI DAN FAKTOR KONVERSI
Besaran pokok dan satuannya
Besaran Pokok Simbol Satuan Simbol
panjang l meter m
Beberapa besaran turunan dan satuannya
Besaran Turunan
dan Simbol Rumus Satuan dan Simbol
luas (A) panjang × lebar m2
volume (V) panjang × lebar × tinggi m3
massa jenis (𝜌) massa⁄volume kg/m3
kecepatan (v) perpindahan
waktu
⁄ m/s
percepatan (𝑎) kecepatan
waktu
Awalan satuan (Prefix of units)
Awalan Simbol Faktor Pengali Contoh
iv
Awalan Simbol Faktor Pengali Contoh
terra T 1012 atau ×1000000000000 terrameter (Tm)
Faktor Konversi Satuan
v
1 kW h = 3,6 MJ
1 Joule = 1 N.m=1 Watt.sekon
1 Joule = 0,24 kal
1 Kal = 4,1840 J
1 Btu = 1054,35 J
1 erg = 10-7 J Daya
1 watt = 1 Joule/sec = 0,86 kcal/h
1 daya kuda (HP) = 745,7 W
1 W = 1,341 x 10-3 HP
Konstanta-Konstanta penting
Jenis Konstanta Simbol Nilai
Konstanta gravitasi G 6,672 × 10-11 N.m2/kg2
Percepatan gravitasi bumi 𝑔 9,81 m/s2
Massa jenis/densitas udara 𝜌𝑢𝑑𝑎𝑟𝑎 1,22 kg/m3 Massa jenis/densitas air tawar 𝜌𝑎𝑖𝑟 𝑡𝑎𝑤𝑎𝑟 1000 kg/m3 Massa jenis/densitas air laut 𝜌𝑎𝑖𝑟 𝑙𝑎𝑢𝑡 1025 kg/m3 Massa jenis/densitas besi 𝜌𝑏𝑒𝑠𝑖 7.860 kg/m3
MEKANIKA TERAPAN 1
BAB I STATIKA
Statika adalah bahasan dalam fisika yang mempelajari tentang sistem gaya dalam keadaan benar-benar diam.
1.1 Vektor Gaya
Gaya, simbol F, adalah tarikan atau dorongan yang merubah keadaan benda yang diam atau benda yang bergerak dengan kecepatan tetap. Satuan gaya adalah Newton. Satu Newton adalah gaya yang apabila dikenakan pada benda 1 kg menyebabkan benda tersebut mengalami percepatan sebesar 1 m/s2.
Untuk menjelaskan mengenai gaya, besar dan arahnya harus ditentukan. Sehingga gaya termasuk besaran vektor yaitu besaran yang memiliki nilai dan arah. Vektor digambarkan dengan garis panah berskala. Dalam hal vektor gaya panjang garis menyatakan besar gaya dan arah panah menyatakan arah garis kerja gaya.
Gambar 1.1 Beberapa vektor yang menggambarkan gaya.
1.2 Resultan Gaya
Resultan dari beberapa gaya adalah sebuah gaya yang menghasilkan efek yang sama jika menggantikan gaya-gaya tersebut. Gambar 1.2 menunjukkan tiga gaya yang nilainya 5, 10 dan 8 N menarik benda dengan arah yang sama. Diperoleh resultan gayanya adalah 23 N dalam arah yang sama. Ini adalah kasus sederhana berupa gaya-gaya sejajar yang mana resultan gaya diperoleh dengan penjumlahan aljabar biasa.
Gambar 1.2 Resultan gaya
U
20 N
Gaya 20 N bekerja dengan arah ke
Timur Laut
15 N
Gaya 15 N bekerja dengan arah ke Selatan
12,5 N
Gaya 12,5 N bekerja dengan
arah ke Barat
5 N 8 N
10 N
8 N 5 N 10 N
Diagram ruang Diagram vektor
MEKANIKA TERAPAN 2
Diagram ruang menggambarkan sistem gaya, sedangkan diagram vektor menggambarkan vektor-vektor secara berskala dan dihubungkan dari ujung ke ujung.
Untuk menghitung resultan dari gaya-gaya yang arahnya tidak sejajar digunakan metode poligon gaya. Setiap vektor digambar dengan skala persis sesuai dengan besar dan arahnya, kemudian pangkal vektor kedua diletakkan pada ujung vektor pertama, pangkal vektor ketiga diletakkan pada ujung vektor kedua, demikian seterusnya. Vektor resultan diperoleh dengan menarik garis dari pangkal vektor pertama dan ujung vektor terakhir.
Gambar 1.3 Menentukan resultan gaya
Equilibrant
Equilibrant adalah gaya tunggal yang apabila ditambahkan ke suatu sistem gaya akan menyebabkan benda dalam keseimbangan. Dengan kata lain equilibrant akan menetralkan gaya-gaya lain.
Gambar 1.4 Menggambarkan equilibran
Segitiga Gaya
Jika tiga gaya bekerja pada suatu titik dalam keadaan setimbang, diagram vektor yang digambarkan dengan skala merepresentasikan gaya dalam nilai dan arah, akan berbentuk segitiga tertutup.
5 N 8 N
10 N
8 N
5 N 10 N
Diagram ruang Diagram vektor
23°
5 N 8 N
10 N
8 N
5 N 10 N
Diagram ruang Diagram vektor
5 N 8 N
MEKANIKA TERAPAN 3 Gambar 1.5 Segitiga gaya
Poligon Gaya
Jika beberapa gaya bekerja pada sebuah titik berada dalam kesetimbangan, maka diagram vektor yang digambarkan dengan skala merepresentasikan gaya dalam nilai dan arah, akan berbentuk poligon tertutup.
Gambar 1.6 Poligon gaya
Kedua teorema di atas pada dasarnya sama, kecuali bahwa segitiga gaya berlaku hanya untuk sistem tiga gaya sedangkan poligon gaya untuk gaya yang lebih dari tiga.
Gaya Concurrent dan Gaya Coplanar Parallel
Garis-garis aksi dari 3 gaya coplanar (sebidang) dalam keseimbangan, atau sejumlah gaya dalam kesetimbangan yang mana dapat direduksi menjadi 3 gaya, pasti akan bertemu pada titik yang sama atau paralel satu dengan lainnya.
Beban 400 N B
C
Diagram ruang
Diagram vektor A
400 N c
a
b
50° 60°
50° 60°
8 N
5 N 10 N
Diagram ruang Diagram vektor
5 N 8 N
MEKANIKA TERAPAN 4 Gambar 1.7 Gaya concurrent dan gaya coplanar parallel
Notasi Bow
Metode ini untuk mendefinisikan gaya dalam sistem gaya dengan memberikan huruf pada ruang dalam diagram ruang dengan huruf kapital A, B, C dst. Sehingga masing-masing gaya dapat dinyatakan oleh dua huruf dari dua ruang yang terpisah gaya, seperti gaya AB, gaya BC dan seterusnya.
Gambar 1.8 Notasi Bow untuk menentukan diagram ruang dan diagram vektor
Vektor masing-masing gaya dalam diagram vektor diberi label dengan huruf kecil pada pangkal dan ujung vektor seperti ab, bc, dst.
1.3 Komponen Gaya
Gaya dapat diuraikan menjadi komponen vertikal dan horizontal
• FX adalah komponen gaya horisontal, sejajar sumbu x
• FY adalah komponen gaya vertikal, sejajar sumbu y
4 N
10 N 6 N
D C
Diagram ruang
Diagram vektor A
c
a b E
B
d
MEKANIKA TERAPAN 5 Gambar 1.9 Komponen horisontal dan vertikal gaya
𝐹𝑥 = 𝐹 cos 𝜃 𝐹𝑦 = 𝐹 sin 𝜃
Contoh:
Sebuah benda ditarik dengan gaya 100 N yang kemiringannya 60o terhadap horisontal. Tentukan komponen-komponen rectanguler gaya!
Penyelesaian:
𝐹𝑥 = 𝐹 cos 𝜃 = 100 𝑁 × cos 60 = 100 𝑁 × 0,5 = 50 𝑁 𝐹𝑦 = 𝐹 sin 𝜃 = 100 𝑁 × sin 60 = 100 𝑁 × 0,866 = 86,6 𝑁
100 N
MEKANIKA TERAPAN 6
Penjumlahan Dua Vektor Dengan Aturan Cosinus
Gambar 1.10 Resultan dua gaya dengan metode jajaran genjang
Dua buah gaya A dan B bekerja pada satu titik membentuk sudut 𝛼, maka resultan gaya R dapat diperoleh dengan persamaan,
𝑅 = √𝐴2+ 𝐵2+ 2. 𝐴. 𝐵. cos 𝛼
Aturan Segitiga Sinus
Gambar 1.11 Aturan segitiga sinus
Sebuah segitiga memiliki sisi A, B dan C, berhadapan dengan sudut a, b dan c, maka berlaku prinsip segitiga sinus sebagai berikut:
𝐴 sin 𝑎 =
𝐵 sin 𝑏 =
𝐶 sin 𝑐
A
B
R
B A
R
𝛼
𝛼
A
b
C c
MEKANIKA TERAPAN 7
Contoh Penerapan
1. Tali Sling
Dua buah tali disambung kemudian kedua ujung tali dipasang pada suatu atap, kemudian diberi beban 400 N seperti gambar di bawah. Jika tali membentuk sudut 50o dan 60o terhadap vertikal, hitunglah besar gaya tarikan pada masing-masing tali!
Jawab:
Pertama kita gambarkan dalam diagram ruang kemudian kita buat diagram vektornya dengan Notasi Bow.
Gambar 1.12 Diagram ruang dan diagram vektor pada tali sling
Untuk menghitung gaya-gaya, kita hitung terlebih dahulu sudut acb (di depan vektor gaya 400 N)
Sudut acb = 180 – (60 + 50) = 70o
Kemudian menggunakan aturan segitiga sinus kita hitung gaya pada tali ac,
𝑎𝑐 sin 50𝑜 =
400 sin 70𝑜
𝑎𝑐 =400 × 0,7660,9397
= 326 𝑁
Gaya pada tali bc,
𝑏𝑐 sin 60𝑜=
400 sin 70𝑜
𝑏𝑐 =400 × 0,8660,9397 Beban 400 N B
C
Diagram ruang
Diagram vektor A
400 N c
a
b
50° 60°
MEKANIKA TERAPAN 8
= 368,6 𝑁
Jadi gaya pada tali AC = 326 N, dan gaya pada tali BC = 368,6 N.
2. Jib Crane
Sudut antara jib dan tiang vertikal (vertical post) pada JIB Crane adalah 42o, dan antara tie dan jib sudutnya 36o. Hitunglah gaya pada jib dan tie ketika benda bermassa 3,822 . 103 kg dibebankan pada kepala crane!
Gambar 1.13 JIB crane
Kita gambarkan diagram ruang dan diagram vektor dengan Notasi Bow,
Gambar 1.14 Diagram ruang dan diagram vektor dengan
Jib
Post
MEKANIKA TERAPAN 9 Notasi Bow pada jib crane.
Berdasarkan diagram vektor,
Sudut cab = 180° - (42° + 36°) = 102°
Menggunakan aturan segitiga sinus,
Gaya pada JIB
sin 102° =
37,5 sin 36°
Gaya pada JIB =37,5 × 0,97810,5878
= 62,38 kN
Gaya pada TIE
sin 42° =
37,5 sin 36°
Gaya pada TIE = (37,5 × 0,6691) 0,5878⁄ = 42,69 kN
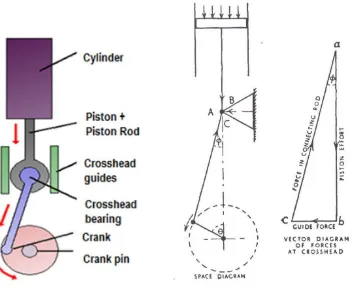
3. Mekanisme Torak Mesin (Reciprocating Engine Mechanism)
MEKANIKA TERAPAN 10
Gambar 1.15 Sistem gaya pada thorak mesin
Karena gaya piston selalu bekerja secara vertikal, dan gaya guide selalu horisontal. Vektor diagram gaya-gaya pada crosshead selalu berbentuk segitiga yang menyudut ke kanan. Catat bahwa sudut antara Top Dead Centre (pusat garis mesin) dan connecting road adalah 𝜙 dalam diagram ruang, adalah sama dengan sudut antara gaya piston dan gaya dalam connecting road dalam diagram vektor.
Contoh Soal:
Piston pada torak mesin mendorong dengan gaya 160 kN pada crosshead ketika crank 35o dari Pas Top Dead Centre. Jika langkah pada piston adalah 900 mm dan panjang connecting road adalah 1,65 m, hitunglah gaya pada crosshead guide dan gaya pada connecting rod!
Penyelesaian:
Berdasarkan diagram ruang,
Panjang crank = ½ × langkah = 0,45 m
Panjang connecting rod = 1,65 m
Sudut crank terhadap Top Death Center (TDC) = 𝜃 = 35°
MEKANIKA TERAPAN 11
0,45 sin 𝜙 =
1,65 sin 35°
sin 𝜙 =0,45 × 0,57361,65
= 0,1564
𝜙 = sin−10,1564
= 9°
Berdasarkan diagram vektor,
𝑠𝑢𝑑𝑢𝑡 𝜙 = 9°
tan 𝜙 =𝐺𝑎𝑦𝑎 𝑃𝑎𝑑𝑎 𝑃𝑖𝑠𝑡𝑜𝑛𝐺𝑎𝑦𝑎 𝑃𝑎𝑑𝑎 𝐺𝑢𝑖𝑑𝑒
𝐺𝑎𝑦𝑎 𝑝𝑎𝑑𝑎 𝐺𝑢𝑖𝑑𝑒 = 160 × tan 9°
= 25,34 𝑘𝑁
cos 𝜙 =𝐺𝑎𝑦𝑎 𝑃𝑎𝑑𝑎 𝐶𝑜𝑛𝑛𝑒𝑐𝑡𝑖𝑛𝑔 𝑅𝑜𝑎𝑑𝐺𝑎𝑦𝑎 𝑃𝑖𝑠𝑡𝑜𝑛
𝐺𝑎𝑦𝑎 𝑝𝑎𝑑𝑎 𝐶𝑜𝑛𝑛𝑒𝑐𝑡𝑖𝑛𝑔 𝑅𝑜𝑎𝑑 =cos 9°160
= 162 𝑘𝑁
1.4 Momen Gaya
Gaya tidak hanya cenderung untuk menggerakan benda tetapi juga untuk memutar benda. Ukuran keefektifan sebuah gaya yang bekerja pada suatu benda untuk memutar benda tersebut terhadap suatu poros tertentu disebut momen gaya atau torsi.
Gambar 1.16 Torsi atau momen gaya 𝐹
90° A
O
MEKANIKA TERAPAN 12
Perhatikan gambar di atas! Sebuah gaya 𝐹 digunakan untuk memutar sebuah batang pada jarak 𝑙 dari sumbu putar O. Arah gaya tegak lurus lengan gaya 𝑙. Maka besarnya momen gaya tergantung pada besar gaya 𝐹 dan panjang lengan momen 𝑙, dirumuskan dengan persamaan
Momen gaya = gaya × lengan momen
𝜏 = 𝐹. 𝑙
Lengan momen (𝑙) merupakan panjang garis yang ditarik dari titik poros O sampai memotong tegak lurus garis kerja vektor gaya 𝐹.
Terkadang gaya disimbolkan juga dengan huruf P, maka momen gaya kadang dirumuskan
𝜏 = 𝑃. 𝑙
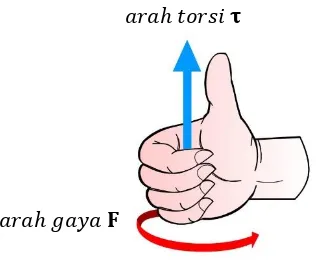
Torsi 𝛕 termasuk besaran vektor yang memiliki nilai dan arah. Arah momen gaya mengikuti aturan putaran tangan kanan.
Gambar 1.17 Arah momen gaya mengikuti aturan putaran tangan kanan
Dilihat dari atas, jika arah putaran keempat jari/arah gaya berlawanan arah putaran jarum jam, maka torsi bertanda positif (+), sebaliknya jika arah putaran keempat jari searah jarum jam, maka torsi bertanda negatif ( - ).
Momen gaya total pada suatu benda yang disebabkan oleh dua buah gaya atau lebih yang bekerja terhadap suatu poros, dirumuskan sebagai berikut
Σ𝜏 = 𝜏1+ 𝜏2+ ⋯ + 𝜏𝑛
Keseimbangan Rotasi (Rotational Equilibrum)
Ketika sebuah benda dikenai beberapa gaya berada dalam kesetimbangan rotasi, jumlah momen gaya searah jarum jam terhadap suatu titik adalah sama dengan jumlah momen gaya berlawanan arah jarum jam terhadap titik yang sama.
𝑎𝑟𝑎ℎ 𝑔𝑎𝑦𝑎 𝐅
MEKANIKA TERAPAN 13
Sebagai contoh perhatikan gambar berikut!
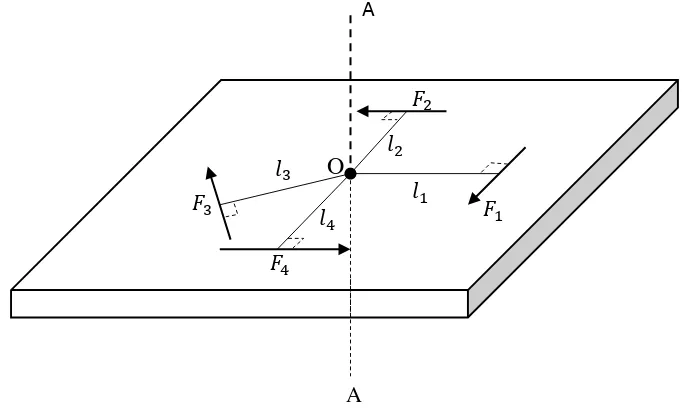
Gambar 1.18 Sebuah benda dikenai beberapa gaya berada dalam kesetimbangan rotasi
Perhatikan gaya-gaya sebidang 𝐹1, 𝐹2, 𝐹3 dan 𝐹4 bekerja bersama-sama pada sebuah benda dan menjaga benda tetap pada kesetimbangan. AA adalah sumbu yang mana benda dapat berputar. 𝑙1, 𝑙2, 𝑙3 dan 𝑙4 adalah jarak masing-masing gaya tegak lurus terhadap O.
Momen gaya dari gaya-gaya tersebut adalah:
Momen gaya 𝐹1 adalah 𝜏1 = 𝐹1 × 𝑙1, searah jarum jam (-)
Momen gaya 𝐹2 adalah 𝜏2 = 𝐹2× 𝑙2, berlawanan arah jarum jam (+) Momen gaya 𝐹3 adalah 𝜏3 = 𝐹3× 𝑙3, searah jarum jam (-)
Momen gaya 𝐹4 adalah 𝜏4 = 𝐹4× 𝑙4, berlawanan arah jarum jam (+)
Resultan momen-momen gaya ini adalah sama dengan penjumlahan aljabar dari semua momen gaya disekitar O.
Momen gaya resultan Σ𝜏 = 𝜏1+ 𝜏2+ 𝜏3+ 𝜏4
= −𝐹1𝑙1+ 𝐹2𝑙2− 𝐹3𝑙3+ 𝐹4𝑙4
Karena benda berada dalam keseimbangan rotasi, maka berdasarkan prinsip momen, momen resultan pastilah nol.
−𝐹1𝑙1+ 𝐹2𝑙2 − 𝐹3𝑙3+ 𝐹4𝑙4 = 0
𝐹1𝑙1+ 𝐹3𝑙3 = 𝐹2𝑙2+ 𝐹4𝑙4
Jika sistem berada pada keseimbangan rotasi maka:
Jumlah momen gaya berlawanan arah jarum jam = jumlah momen gaya searah jarum jam
A
O
A
𝑙1
𝑙2
𝑙3
𝑙4 𝐹1
𝐹2
𝐹3
MEKANIKA TERAPAN 14
∑𝜏𝑐𝑙𝑜𝑐𝑘𝑤𝑖𝑠𝑒= ∑𝜏𝑎𝑛𝑡𝑖𝑐𝑙𝑜𝑐𝑘𝑤𝑖𝑠𝑒
Kondisi Kesetimbangan Untuk Benda-Benda di Bawah Pengaruh Gaya-Gaya Sebidang Non-Concurrent (Tidak Bertemu pada Satu Titik)
Ketika sebuah benda di bawah pengaruh sistem gaya sebidang non-concurrent, maka benda mungkin akan berputar ke arah resultan momen sistem gaya, atau mungkin benda akan bergerak secara horisontal atau vertikal ke arah komponen gaya vertikal dan horisontal.
“Benda dapat berada dalam kesetimbangan jika jumlah aljabar semua gaya luar dan momen gaya terhadap suatu titik pada bidang tersebut adalah nol ”.
Secara matematik, kondisi kesetimbangan dapat dinyatakan sebagai berikut:
∑ 𝐻 = 0 (jumlah semua komponen gaya horisontal nol)
∑ 𝑉 = 0 (jumlah semua komponen gaya vertikal nol)
∑ 𝜏 = 0 (jumlah semua momen gaya nol)
Ketika gaya-gaya sebidang bertemu pada suatu titik, sistem gaya disebut dengan sistem gaya sebidang concurrent. Sistem ini akan setimbang jika memenuhi kondisi ∑ 𝐻 = 0 dan
∑ 𝑉 = 0.
Ketika gaya-gaya sebidang tidak bertemu pada suatu titik sistem disebut dengan sistem gaya sebidang non-concurrent. Sistem ini akan seimbang jika semua dari ketiga kondisi kesetimbangan terpenuhi ∑ 𝐻 = 0, ∑ 𝑉 = 0 dan ∑ 𝜏 = 0.
Kondisi ∑ 𝐻 = 0 dan ∑ 𝑉 = 0 meyakinkan bahwa sistem tidak direduksi menjadi gaya tunggal dan kondisi ∑ 𝜏 = 0 meyakinkan bahwa sistem tidak berubah menjadi sebuah kopel. Pada kasus sistem gaya sebidang non-concurrent ∑ 𝜏 bisa sama dengan nol tetapi sistem belum tentu setimbang karena titik dimana momen gaya diambil mungkin berada pada garis aksi dari resultan gaya. Maka pada kasus ini, semua dari tiga kondisi kesetimbangan harus terpenuhi.
Teorema Varignon
“Jumlah aljabar dari momen dua gaya terhadap titik manapun pada bidang mereka sama dengan momen gaya dari resultan 2 gaya tersebut terhadap suatu titik”.
Contoh:
MEKANIKA TERAPAN 15 Gambar 1.19 Gaya P dan Q bekerja pada titik A
Gambar 1.19 menunjukkan gaya P dan Q bekerja pada titik A. besarnya P dinyatakan oleh AB dan Q dinyatakan oleh AD. Dengan metode jajaran genjang diperoleh AC yang menyatakan resultan R dari P dan Q.
Ambil titik manapun O pada bidang gaya P dan Q dan dalam garis CD sebagaimana pada gambar. Gabungkan OB dan OA
Momen gaya P terhadap O = 2 ∆OAB Momen gaya Q terhadap O = 2 ∆OAD Momen gaya R terhadap O = 2 ∆OAC
Tetapi luas ∆OAB = luas ∆ABC = luas ∆ACD
Penjumlahan aljabar momen gaya dari gaya P dan Q = 2 ∆OAB + 2 ∆OAD
= 2 ∆ACD + 2 ∆OAD (Substitusi ∆ACD untuk + ∆OAB yang sama)
= 2 ∆ACD + 2 ∆OAD = 2 (∆ACD + ∆OAD)
= 2 ∆OAC
= momen gaya R terhadap O
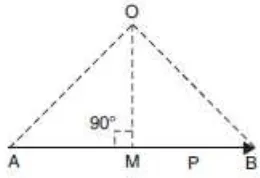
Catatan: berdasarkan gambar 1.20 tinjau gaya P yang dapat dinyatakan dalam besar dan arah oleh garis AB. Tentukan O menjadi titik yang mana momen gaya dari gaya ini ditentukan.
Gambar 1.20 Momen gaya dari gaya P terhadap titik O adalah AB × OM = 2 ∆AOB
Gambar OM tegak lurus terhadap AB dan gabungkan OA dan OB. Sekarang momen gaya dari gaya P terhadap O = P × OM
MEKANIKA TERAPAN 16
Tetapi AB × OM adalah sama dengan dua kali luas segitiga OAB karena secara geometri luas segitiga ini sama dengan (AB × OM)/2
Jadi momen gaya dari gaya P terhadap titik O adalah AB × OM = 2 ∆AOB
Kasus 2: ketika dua gaya sejajar satu sama lain.
Ambil P dan Q menjadi dua gaya sejajar sebagaimana gambar 1.21.
Gambar 1.21 Gaya P dan Q menjadi dua gaya sejajar
Gambar garis AB tegak lurus terhadap gaya P dan Q sehingga bertemu pada titik A dan B. Letakkan titik sembarang O pada bidang kedua gaya pada garis AB. Resultan gaya P dan Q akan menjadi R yang mana sama dengan jumlah gaya P dan Q. Buatlah resultan ini bekerja melalui sebuah titik C pada AB sehingga
Q × CB = P × CA
Jumlah momen dari gaya P dan Q terhadap O = P × OA + Q × OB
= P(OC + CA) + Q(OC-CB) = (P + Q) OC + P × CA - Q × CB ingat karena Q × CB = P × CA, maka:
= (P + Q) OC
= Momen gaya R terhadap O
Catatan: Teorema Varignon dapat diaplikasikan pada kasus dimana dua gaya menghasilkan resultan tunggal dan tidak dapat diaplikasikan ketika gaya membentuk kopel karena resultan gaya pada kopel adalah nol.
MEKANIKA TERAPAN 17
Kopel adalah pasangan dua gaya yang besarnya sama namun arahnya berlawanan bekerja pada sebuah benda dengan syarat bahwa garis aksi kedua gaya tidak pada satu garis lurus.
Gambar 1.22 Kopel
Efek ketika kopel bekerja pada benda tegar adalah benda akan berotasi tanpa berpindah pada sumbunya. Jarak tegak lurus antara garis aksi dari dua gaya pembentuk kopel disebut lengan kopel. Kemudian pada gambar 1.22 dua gaya yang besarnya sama P dan Q bekerja pada titik A dan B dalam arah berlawanan membentuk kopel dengan AB sebagai lengan kopel.
Momen dari sebuah kopel atau sering disebut torque sama dengan perkalian salah satu gaya pembentuk kopel dengan lengan kopel.
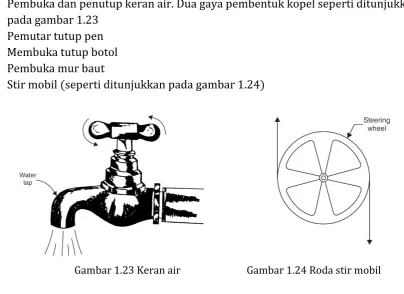
Berikut adalah contoh-contoh kopel dalam kehidupan sehari-hari
1. Pembuka dan penutup keran air. Dua gaya pembentuk kopel seperti ditunjukkan pada gambar 1.23
2. Pemutar tutup pen 3. Membuka tutup botol 4. Pembuka mur baut
5. Stir mobil (seperti ditunjukkan pada gambar 1.24)
Gambar 1.23 Keran air Gambar 1.24 Roda stir mobil
Sifat Kopel
MEKANIKA TERAPAN 18
Perhatikan dua gaya sejajar dan berlawanan arah dengan besar P masing-masing membentuk kopel P × AB dimana titik A dan B adalah titik dimana gaya P dan P bekerja. Perdasarkan gambar 1.25 (a)
Gambar 1.25 Penjumlahan aljabar momen-momen gaya pembentuk kopel terhadap titik manapun pada bidang yang sama selalu tetap
Momen gaya terhadap O = P × OB - P × OA = P(OB - OA) = P × AB
Berdasarkan gambar 1.25 (b)
Momen gaya terhadap O = P × OB + P × OA = P(OB + OA) = P × AB
Berdasarkan Gambar 1.25 (c)
Momen gaya terhadap O = P × OA - P × OB = P(OA - OB) = P × AB
Pada semua dari ketiga kasus, kita temukan bahwa jumlah momen pada masing-masing kasus tidak tergantung pada letak titik O, dan hanya tergantung pada konstanta lengan
kopel, sehingga “jumlah aljabar momen gaya pembentuk kopel terhadap titik manapun pada bidang yang sama adalah tetap”.
MEKANIKA TERAPAN 19
3. Dua kopel bekerja pada sebuah tempat di atas benda tegar yang mana momen-momennya sama tetapi arahnya berlawanan, setimbang satu sama lain. (Two couple acting in one place upon a rigid body whose moments are equal but opposite in sense, balance each other).
4. Sebuah gaya bekerja pada benda tegar dapat diganti dengan gaya yang sama seperti gaya yang bekerja pada titik lain dan sebuah kopel yang mana momennya sama dengan momen gaya terhadap titik dimana gaya yang sama bekerja. (A force acting on a rigid body can be replaced by an equal like force acting at any other point and a couple whose moment equals the moment of the force about the point where the equal like force is acting). 5. Beberapa kopel sebidang adalah ekuivalen dengan sebuah kopel single yang momennya
sama terhadap jumlah aljabar momen-momen dari setiap kopel. (Any number of coplanar couples are equivalent to a single couple whose moment is equal to the algebraic sum of the moments of the individual couples).
Aplikasi Teknik Momen Gaya
Beberapa aplikasi teknik penting dari momen-momen diantaranya adalah: 1. Tuas/ Pengungkit
2. Timbangan 3. Tower Crane
4. Lever Safety Valve (Tuas Katup Pengaman)
1. Tuas/Pengungkit
Tuas didefinisikan sebagai besi tegar, lurus atau melengkung yang dapat berputar disekitar titik tetap yang disebut titik tumpu. Tuas bekerja berdasarkan prinsip momen bahwa ketika tuas berada dalam keseimbangan, jumlah aljabar momen-momen gaya terhadap titik tumpu adalah nol.
MEKANIKA TERAPAN 20 Gambar 1.27 Prinsip tuasmenggambarkan sebuah besi linggis digunakan untuk
memindahkan kayu berat
Berdasarkan gambar 1.26:
Lengan kuasa adalah jarak antara titik tumpu dengan garis aksi gaya kuasa. Lengan beban adalah jarak antara titik tumpu dengan titik dimana beban bekerja. Prinsip momen dapat diaplikasikan ketika tuas berada dalam keseimbangan.
Momen terhadap titik F
𝑃 × 𝑎 = 𝑊 × 𝑏
Keuntungan mekanis tuas
𝐾𝑀 =𝑊𝑃 =𝑎𝑏 =𝑙𝑒𝑛𝑔𝑎𝑛 𝑘𝑢𝑎𝑠𝑎𝑙𝑒𝑛𝑔𝑎𝑛 𝑏𝑒𝑏𝑎𝑛
𝐾𝑢𝑎𝑠𝑎 × 𝑙𝑒𝑛𝑔𝑎𝑛 𝑘𝑢𝑎𝑠𝑎 = 𝑏𝑒𝑏𝑎𝑛 × 𝑙𝑒𝑛𝑔𝑎𝑛 𝑏𝑒𝑏𝑎𝑛
Ini disebut prinsip tuas. Gambar 1.27 menggambarkan sebuah besi linggis digunakan untuk memindahkan kayu berat dengan menggunakan kuasa yang kecil dengan meletakkan titik tumpu pada tempat yang tepat.
Contoh:
Seorang pria dan anak mengangkat beban 300 N dengan menggunakan batang yang panjangnya 2 m dan beratnya 100 N. pria dan anak mengangkat pada ujung-ujung batang, sedangkan beban diletakkan diantara pria dan anak. Dimana beban harus diletakkan supaya pria memikul beban dua kali beban yang dipikul anak?
MEKANIKA TERAPAN 21
Gambar 1.29
Berdasarkan gambar 1.29. berat batang bekerja pada pusat G. Ambil beban yang dipikul W dan beban yang dipikul pria 2W.
Ketika berat 300 N bekerja pada jarak x meter dari pria.
Σ𝑉 = 0
𝑊 + 2𝑊 = 300 + 100 = 400 𝑊 = 133,3 𝑁
Dengan mengambil momen gaya terhadap titik A (anak)
2𝑊 × 2 = 300(2 − 𝑥) + 100 × 1 4𝑊 = 600 − 300𝑥 + 100 4 × 133,3 = 700 − 300𝑥
533,2 = 700 − 300𝑥 300𝑥 = 166,8
𝑥 = 0,556 𝑚
Contoh:
Hitunglah kuasa yang diperlukan pada ujung batang besi yang beratnya 100 N dan panjang 6 meter untuk mengangkat beban 1500 N pada ujung lain. Titik tumpu dijaga berada pada jarak 4,5 m dari ujung dimana kuasa diberikan.
Penyelesaian:
MEKANIKA TERAPAN 22
Gambar 1.33
Dengan mengambil momen gaya terhadap titik tumpu F
𝑃 × 4,5 + 100 × 1,5 = 1500 × 1,5 𝑃 × 4,5 + 150 = 2250
𝑃 = 466,6 𝑁
2. Tuas Katup pengaman (Lever Safety Valve)
Tuas katup pengaman adalah sebuah pengganjal boiler yang tujuannya untuk menjaga tekanan dalam boiler tetap berada pada tingkat yang aman dan untuk melepaskan tekanan udara ketika tekanan meningkat melewati batas aman.
Gambar 1.28 Lever safety valve
Berdasarkan gambar 1.28. ini terdiri dari katup V kuat yang terhubung dengan tuas FA, yang mana titik tumpu adalah pada F. Pada ujung A, sebuah beban w digantung yang mana akan memberikan momen pada katup untuk menjaganya tetap berada pada tempatnya melawan tekanan uap dari bawah, yang mana memberikan momen yang berlawanan terhadap titik tumpu F. Segera setelah momen akibat tekanan uap meningkat, katup terangkat ke atas dari dudukannya dan melepaskan tekanan uap ke atmosfir. Ketika tekanan uap di dalam boiler turun menuju nilai aman katup otomatis menempati dudukannya dan menghentikan keluarnya uap lebih lanjut.
Ambil 𝑤𝐿 = berat tuas (bekerja pada pusat gravitasi G)
𝑤𝑉 = berat katup
𝑤 = berat beban di ujung A
𝑝 = intensitas aman tekanan uap
𝐴 = luas katup (= 𝜋⁄ 𝑑4 2dimana 𝑑 adalah diameter katup)
Untuk menghitung besarnya beban w yang mana akan pertama menjaga katup pada dudukannya melawan tekanan uap, mari kita ambil momen terhadap titik tumpu F,
MEKANIKA TERAPAN 23
𝑤 =𝑉𝐹(𝑃 × 𝐴 − 𝑤𝐴𝐹𝑉) − 𝑤𝐿× 𝐺𝐹
Karena semua besaran kecuali w dan AF diketahui, maka w dapat dihitung kemudian. Dan reaksi pada 𝐹 = 𝑝 × 𝐴 − 𝑤𝐿− 𝑤𝑉− 𝑤. Reaksi ini akan bekerja ke arah bawah ketika tekanan uap adalah lebih besar dan ke arah atas ketika ini lebih kecil dari pada gaya-gaya ke bawah lainnya.
Resultan Sistem Gaya Coplanar (Sebidang), Non-Concurrent Non-Paralel
(i) Besar, arah dan letak resultan sistem gaya sebidang, non-concurrent, non-paralel dapat diperoleh secara analitis dengan persamaan
𝑅 = √(Σ𝐻)2 + (Σ𝑉)2
Dimana:
Σ𝐻 = jumlah aljabar komponen horisontal semua gaya
Σ𝑉 = jumlah aljabar komponen vertikal semua gaya
(ii) Arah resultan gaya ditentukan dengan menggunakan persamaan
tan 𝛼 =Σ𝐻Σ𝑉
(iii)Letak resultan ditentukan dengan mengambil momen dari semua komponen tegak lurus gaya terhadap sebuah titik pada bidangnya dan persamaan jumlah aljabar momen-momen dari semua gaya dengan resultan menggunakan persamaan.
Momen gaya resultan R terhadap titik = jumlah aljabar komponen tegak lurus dari semua gaya.
Contoh:
Gaya 1P, 3P, -4P masing-masing bekerja pada sisi-sisi segitiga samasisi dengan sisi 20 mm digambar pada lapisan tipis padat. Hitunglah besar, arah dan letak resultan gaya-gaya tersebut.
Penyelesaian:
MEKANIKA TERAPAN 24
Penyelesaian gaya-gaya horisontal:
∑𝐻 = −1𝑃 cos 60° + 3𝑃 + 4𝑃 cos 60° = −0,5𝑃 + 3𝑃 + 2𝑃 = 4,5𝑃
Penyelesaian gaya-gaya vertikal:
∑𝑉 = −1𝑃 sin 60° − 4𝑃 sin 60° = −4,33𝑃
Resultan gaya,
𝑅 = √(∑𝐻)2+ (∑𝑉)2 = √(4,5𝑃)2+ (−4,33𝑃)2 = 6,24𝑃
Arah resultan 𝜃,
tan 𝜃 =∑𝐻 =∑𝑉 −4,33𝑃4,5𝑃 = −0,962
𝜃 = tan−1(−0,962) = −43,9° terhadap horisontal
Letak resultan gaya,
Ambil x = jarak tegak lurus antara B dan garis gaya resultan.
Sekarang, ambil momen disekitar B, kita peroleh
∑𝑀𝐵∶ 6,24𝑃 × 𝑥 = 𝑃 × 0 + 3𝑃 × 0 + 4𝑃 × sin 60 ∘ 𝑥 = 11,1 𝑚𝑚
MEKANIKA TERAPAN 25
Contoh:
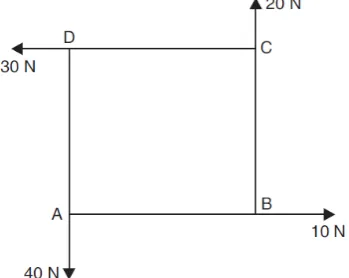
Empat gaya yang nilainya 10 N. 20 N, 30 N dan 40 N garis gayanya bekerja sepanjang keempat sisi persegi ABCD, seperti gambar 3.33. hitunglah besar, arah dan posisi resultan gaya.
Gambar 1.30
Penyelesaian:
Besarnya resultan gaya R
Penyelesaian semua komponen gaya horisontal
Σ𝐻 = 10 − 30 = −20 𝑁
Dan penyelesaian semua komponen vertikal
Σ𝑉 = 20 − 40 = −20 𝑁
Sekarang, resultan gaya
𝑅 = √(Σ𝐻)2+ (Σ𝑉)2 𝑅 = √(−20)2+ (−20)2
= 28,28 𝑁
Untuk menghitung arah resultan gaya
Gambar 1.31
MEKANIKA TERAPAN 26
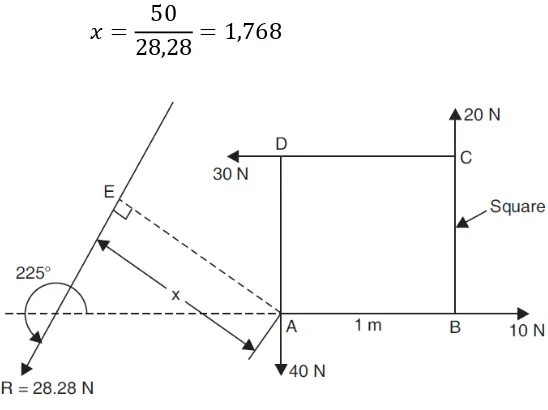
tan 𝜃 =Σ𝐻 =Σ𝑉 −20−20 = 1
𝜃 = 45°
Karena 𝜃 terletak antara sudut 180° dan 270°
Jadi sudut aktual 𝜃 = 180° + 45° = 225°
Posisi resultan gaya:
Ambil x = jarak tegak lurus antara A dan garis resultan gaya.
Sekarang dengan mengambil momen gaya terhadap A, kita peroleh
Σ𝑀𝐴: 28,28 × 𝑥 = 10 × 0 + 20 × 1 + 30 × 1 + 40 × 0 = 50
𝑥 = 50
28,28 = 1,768
Gambar 1.32
1.6 Pusat Gravitasi (Titik Berat) dan Centroid (Pusat Geometri)
MEKANIKA TERAPAN 27 Gambar 1.34 Centroid/pusat geometri dari beberapa benda
MEKANIKA TERAPAN 28
Pusat gravitasi/titik berat suatu benda dapat didefinisikan sebagai titik dimana berat benda tersebut diasumsikan bekerja. Pusat gravitasi benda atau obyek biasanya disimbolkan dengan c.g atau lebih sederhana dengan G. Letak pusat gravitasi tergantung pada bentuk benda.
MEKANIKA TERAPAN 29
Pusat gravitasi beberapa benda dapat diketahui dengan penyeimbangan obyek pada suatu titik. Sebagai contoh untuk mengetahui titik berat batang maka kita gantung batang dengan tali, kemudian kita atur letak ikatan tali hingga kondisi batang menjadi vertikal. Maka letak pusat gravitasi terletak pada ikatan tali tersebut.
Gambar 1.35Pusat gravitasi beberapa benda dapat diketahui dengan penyeimbangan obyek pada suatu titik
Pusat gravitasi sebuah massa yang digantung dari sebuah titik tunggal terletak pada garis vertikal di bawah titik gantung (gambar 1.36a). Pusat gravitasi sebuah massa yang ditunjang oleh sebuah titik tunggal terletak secara vertikal di atas titik penunjang (gambar 1.36b).
(a) (b) Gambar 1.36
Menentukan Titik Berat Benda yang Bentuknya Tidak Teratur
Benda yang bentuknya tidak teratur titik beratnya dapat diketahui dengan langkah-langkah sebagai berikut:
a. Benda digantung
b. Tarik garis vertikal segaris dengan tali.
c. Ulangi untuk ujung penggantung yang berbeda, kemudian Tarik garis vertikal segaris dengan tali.
d. Perpotongan kedua garis tersebut merupakan titik berat benda.
G
MEKANIKA TERAPAN 30 Gambar 1.37 Menentukan letak titik berat benda yang bentuknya tidak teratur
Partikel-partikel pada gambar di bawah ini masing-masing mempunyai gaya berat w1, w2, ...., wn dengan resultan gaya berat w. Resultan dari seluruh gaya berat benda yang terdiri atas bagian-bagian kecil benda dinamakan gaya berat. Titik tangkap gaya berat tersebut yang disebut titik berat.
Gambar 1.38 Titik berat
Pusat massa merupakan tempat massa benda terpusat. Apabila benda mengalami rotasi maka titik pusat massa menjadi pusat rotasi.
Letak Pusat Gravitasi Benda Pejal Teratur
Tabel di bawah memberikan letak pusat gravitasi benda-benda pejal teratur.
MEKANIKA TERAPAN 31
Menentukan Titik Berat Dari Gabungan Beberapa Benda Yang Bentuknya Teratur
MEKANIKA TERAPAN 32
Gambar 1.39Titik berat benda homogen satu dimensi (garis)
Perhatikan gambar 1.39, dua benda 1 dimensi (warna hijau), titik berat masing-masing benda berada di pusat geometri (titik hijau). Untuk benda-benda berbentuk memanjang seperti kawat, massa benda dianggap diwakili oleh panjangnya (satu dimensi) dan titik beratnya dapat dinyatakan dengan persamaan berikut:
𝑥0 =𝑙1𝑥𝑙1+ 𝑙2𝑥2 1+ 𝑙2
𝑦0 =𝑙1𝑦𝑙1+ 𝑙2𝑦2 1+ 𝑙2 l1= panjang garis 1
x1 = koordinat sumbu x titik berat benda 1 y1 = koordinat sumbu y titik berat benda 1 l2= panjang garis 2
x2 = koordinat sumbu x titik berat benda 2 y2 = koordinat sumbu y titik berat benda 2
Contoh:
MEKANIKA TERAPAN 33
Bentuk benda homogen berbentuk garis (1 dimensi) dan letak titik beratnya.
b. Titik berat benda-benda homogen berbentuk luasan (dua dimensi)
MEKANIKA TERAPAN 34
Jika tebal diabaikan maka benda dapat dianggap berbentuk luasan (dua dimensi), dan titik berat gabungan benda homogen berbentuk luasan dapat ditentukan dengan persamaan berikut:
𝑥0 =𝐴1𝐴𝑥1+ 𝐴2𝑥2 1+ 𝐴2
𝑦0 =𝐴1𝐴𝑦1+ 𝐴2𝑦2 1+ 𝐴2
A1 = luas bidang 1 A2 = luas bidang 2
x1 = absis titik berat benda 1 x2 = absis titik berat benda 2 y1 = ordinat titik berat benda 1 y2 = ordinat titik berat benda 2
Contoh:
Tentukan lokasi titik berat luasan berikut ini!
Penyelesaian:
MEKANIKA TERAPAN 35
Data yang diperlukan: A1 = 20 x 50 = 1000 x1 = 10
y1 = 25
A2 = 30 x 20 = 600 x2 = 35
y2 = 40
A3 = 20 x 10 = 200 x3 = 30
y3 = 15
𝑥0 =𝐴1𝑥𝐴1+ 𝐴2𝑥2+ 𝐴3𝑥3 1+ 𝐴2+ 𝐴3
𝑥0 =1000(10) + 600(35) + 200(30)1000 + 600 + 200 𝑥0 = 20,56
𝑦0 =𝐴1𝑦𝐴1+ 𝐴2𝑦2+ 𝐴3𝑦3 1+ 𝐴2+ 𝐴3
𝑦0 =1000(25) + 600(40) + 200(15)1000 + 600 + 200 𝑦0 = 28,89
Jadi letak koordinat titik berat bangun tersebut adalah (20,56 ; 28,89)
MEKANIKA TERAPAN 36
Titik berat dari gabungan beberapa benda pejal homogen berdimensi tiga
MEKANIKA TERAPAN 37
Letak titik berat dari gabungan beberapa benda pejal homogen berdimensi tiga dapat ditentukan dengan persamaan:
𝑥0 =𝑉1𝑥𝑉1+ 𝑉2𝑥2 1+ 𝑉2
𝑦0 = 𝑉1𝑦𝑉1+ 𝑉2𝑦2 1+ 𝑉2
V1 =volume benda 1 V2 = volume benda 2
x1 = absis titik berat benda 1 x2 = absis titik berat benda 2 y1 = ordinat titik berat benda 1 y2 = ordinat titik berat benda 2
SOAL LATIHAN
Kerjakan soal-soal di bawah ini dengan benar!
1. Sebuah dorongan vertikal ke atas 90 N dikenakan pada sebuah benda dan pada waktu yang bersamaan gaya 120 N menarik benda tersebut dalam arah horisontal. Hitunglah besar dan arah resultan dari kedua gaya tersebut!
2. Dua buah gaya bekerja pada suatu benda, gaya pertama menarik benda secara horisontal ke kanan besarnya 20 N, gaya kedua 17 N menarik vertikal ke bawah. Hitunglah besar dan arah gaya ketiga yang akan menetralkan efek dari kedua gaya tersebut!
3. Tiga buah gaya menarik benda sehingga dalam kesetimbangan. Gaya pertama mengarah ke selatan. Gaya kedua mengarah ke 75o ke timur dari utara. Dan gaya ketiga mengarah 40o ke barat dari utara. Jika besar gaya yang mengarah ke selatan adalah 35 N. Hitunglah besar gaya yang lainnya.
4. Dua tali pengangkat terhubung pada papan beban yang bermuatan 25 kN. Jika tali membentuk sudut 32o dan 42o terhadap vertikal, hitunglah tegangan pada masing-masing tali!
5. Sudut antara jib dan vertical post (tiang vertikal) pada sebuah jib crame adalah 40o, dan antara jib dan tie sudutnya 45o. Hitunglah gaya pada jib dan tie ketika beban 15kN tergantung pada kepala crane!
6. Ketika crank pada torak mesin membentuk sudut 60o terhadap Top Dead Centre, gaya kuasa piston efektif pada crosshead adalah 180 kN. Jika langkah pada piston adalah 600 mm, dan panjang connecting road adalah 1,25 m, hitunglah gaya beban pada guide dan dorongan pada connecting road.
MEKANIKA TERAPAN 38
8. Diberikan sebuah bangun datar sebagai berikut. Tentukan koordinat titik berat diukur dari titik O.
9. Diberikan sebuah bangun datar sebagai berikut. Tentukan koordinat titik berat diukur dari titik O.
x (m)
y (m)
2,5
2,5
20
4,5
3,5
1,5
17,5
MEKANIKA TERAPAN 39
BAB II DINAMIKA
Suatu benda dikatakan bergerak jika benda tersebut kedudukannya berubah setiap saat terhadap titik acuannya (titik asalnya). Sebuah benda dikatakan bergerak lurus atau melengkung, jika lintasan berubahnya kedudukan dari titik asalnya berbentuk garis lurus atau melengkung. Kinematika adalah ilmu yang mempelajari gerak tanpa mengindahkan penyebabnya, sedangkan Dinamika adalah ilmu yang mempelajari gerak dan gaya-gaya penyebabnya. Gaya merupakan tarikan atau dorongan yang dapat menyebabkan perubahan posisi, kecepatan, dan bentuk suatu benda.
2.1 Kecepatan dan Efek Perubahan Arah
Kelajuan adalah tingkatan bagaimana gerak benda melalui ruangan. Kelajuan adalah besaran skalar yang besarnya sesuai dengan jarak tempuh dalam satu satuan waktu. Satuan laju dan kecepatan adalah m/s, km/jam atau knot (mil/jam). Kelajuan merupakan besaran skalar. Laju mungkin bervariasi sepanjang perjalanan, sebagai contoh, jika kapal berjalan 180 km dalam 3 jam, adalah tidak mungkin kapal tersebut berjalan dengan kecepatan konstan 60 km/jam selama 3 jam tersebut, melainkan kadang lebih cepat kadang lebih lambat, namun kelajuan rata-ratanya 60 km/jam.
Kelajuan dapat diperoleh dengan rumus,
𝐾𝑒𝑙𝑎𝑗𝑢𝑎𝑛 = 𝑗𝑎𝑟𝑎𝑘 𝑡𝑒𝑚𝑝𝑢ℎ 𝑤𝑎𝑘𝑡𝑢 𝑡𝑒𝑚𝑝𝑢ℎ
atau
𝑣 =𝑠𝑡
Kecepatan menunjukkan laju pada arah tertentu (spesifik). Kecepatan v adalah besaran vektor yang besarnya sesuai dengan perpindahan dalam satu satuan waktu. Oleh karena itu kecepatan menunjukkan 2 fakta tentang gerak benda, yaitu laju dan arah gerakan. Sebagai konsekuensinya kecepatan merupakan besaran vektor dan dapat diilustrasikan dengan menggambarkan sebuah vektor berskala, panjang menyatakan laju gerak benda, dan arah panah menyatakan arah gerak benda.
Gambar 2.1 Vektor kecepatan
MEKANIKA TERAPAN 40
Resultan Kecepatan dicari dengan diagram vektor kecepatan dengan cara yang sama seperti pada diagram vektor gaya. Hal ini disebut dengan penjumlahan vektor.
Contoh:
Sebuah kapal berjalan ke arah utara dengan kecepatan 16 knots bergerak melawan arus air yang kecepatannya 4 knot berarah tenggara. Hitunglah resultan laju dan arah gerak kapal.
Penyelesaian:
Dengan aturan segitiga sinus, diperoleh:
MEKANIKA TERAPAN 41
𝑎 = sin−10,2100 𝑎 = 12,1224° = 12°7′
Jadi diperoleh :
Resultan Laju = 13,47 knots
Resultan arah = 12°7′ dari utara ke timur
Perubahan Kecepatan akan terjadi jika laju berubah atau jika arah gerak berubah, atau kedua-duanya berubah. Pada perubahan kecepatan tanpa perubahan arah akan dianggap bahwa laju dan kecepatan diperlakukan sama.
Kecepatan Linier memiliki satuan yang sama dengan satuan laju yaitu m/s, km/jam, atau knots. Simbol kecepatan adalah 𝑣.
Jika benda bergerak dengan kecepatan rata-rata 40 m/s selama 5 s, maka jarak tempuh total adalah 200 m.
Jarak tempuh = kecepatan rata − rata × waktu tempuh 𝑠 = 𝑣 × 𝑡
Perpindahan (memiliki jarak dan arah) merupakan vektor; simbolnya 𝑠.
Percepatan Linier adalah perubahan kecepatan pada selang waktu tertentu. Jika percepatan bertambah dikatakan mengalami percepatan, sebaliknya jika kecepatan menurun dikatakan mengalami perlambatan (memiliki percepatan negatif).
Sebagai contoh jika sebuah kapal bergerak dengan laju dipercepat dari 2 m/s sampai 12 m/s dalam waktu 5 detik, maka total perubahan kecepatan adalah 12 – 2 = 10 m/s. Dalam waktu 5 detik kecepatan meningkat sebesar 10 m/s, maka dalam waktu 1 detik besar perubahan kecepatan adalah 10 : 5 = 2 m/s. Maka percepatan benda itu adalah 2 m/s2.
Percepatan = perubahan kecepatanselang waktu
𝑎 =∆𝑣∆𝑡 =𝑣𝑡𝑡− 𝑣0 𝑡− 𝑡0
dengan :
𝑎 : percepatan (m/s2)
∆𝑣 : perubahan kecepatan (m/s)
∆𝑡 : selang waktu (s)
MEKANIKA TERAPAN 42
𝑣0 : kecepatan awal (m/s) 𝑡𝑡 : waktu akhir (m/s) 𝑡0 : waktu awal (m/s)
Satu Nautical Mile International adalah 1,852 km, dan satu knots adalah 1,852 km/jam.
Contoh.
Sebuah mesin kapal dimatikan ketika bergerak pada laju 18 knot dan kapal berhenti setelah 20 menit. Diasumsikan perlambatan kapal konstan (diperlambat beraturan). Hitunglah perlambatan kapal (dalam m/s2) dan jarak tempuh kapal dalam nautical mile sejak mesin mati.
Perlambatan diperoleh:
𝑎 =∆𝑣∆𝑡 =𝑣𝑡𝑡− 𝑣0 𝑡− 𝑡0
𝑎 =0 − 18 𝑘𝑛𝑜𝑡𝑠 20 𝑚𝑒𝑛𝑖𝑡
=− 18 × 1,852 𝑘𝑚/𝑗𝑎𝑚1200 𝑠
=−18 × 1852𝑚1200 𝑠3600 𝑠
=−18 × 1852 𝑚3600 × 1200 𝑠
𝑎 = −0,00772 𝑚/𝑠
Jarak tempuh:
𝐽𝑎𝑟𝑎𝑘 𝑡𝑒𝑚𝑝𝑢ℎ = 𝑘𝑒𝑐𝑒𝑝𝑎𝑡𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 × 𝑤𝑎𝑘𝑡𝑢 𝑡𝑒𝑚𝑝𝑢ℎ
=18 + 02 𝑘𝑛𝑜𝑡𝑠 ×2060 𝑗𝑎𝑚
=182 𝑚𝑖𝑙𝑒𝑠𝑗𝑎𝑚 ×2060 𝑗𝑎𝑚
MEKANIKA TERAPAN 43
Contoh.
Sebuah mobil bergerak dari posisi diam hingga mencapai laju 54 km/jam menempuh jarak 90 m. Diasumsikan mobil bergerak lurus berubah beraturan (kecepatan berubah dengan percepatan konstan). Hitunglah percepatan gerak mobil tersebut!
Kecepatan maksimum = 54 km/jam
=54 × 103600 𝑠3𝑚
= 15 𝑚 𝑠⁄
Kecepatan rata-rata = 1
2 (vo+vt) = 1
2 (0+15) = 7,5 m/s
Jarak = kecepatan rata-rata × selang waktu
90 m = 7,5 m/s × selang waktu
Selang waktu, ∆𝑡 = 7,5 𝑚/𝑠 = 12 𝑠90 𝑚
Percepatan, 𝑎 = ∆𝑣∆𝑡
=𝑣𝑡∆𝑡− 𝑣0
=15 − 0 𝑚/𝑠12 𝑠
=1512 𝑚/𝑠2
= 1,25 𝑚/𝑠2
Grafik Kecepatan-Waktu
Grafik kecepatan terhadap waktu dapat sangat berguna menjadi metode untuk menyelesaikan permasalahan sekaligus menyediakan gambar dari sebuah fakta.
Daerah pada grafik kecepatan-waktu merepresentasikan jarak tempuh dan
slope/kemiringan kurva merepresentasikan percepatan. Slope/kemiringan grafik perpindahan (jarak)-waktu merepresentasikan kecepatan.
MEKANIKA TERAPAN 44 Gambar 2.2 sebuah benda bergerak dengan kecepatan konstan 20 km/jam selama 4 jam
Daerah yang dilingkupi oleh grafik = tinggi × panjang Jarak tempuh = kecepatan × waktu
= 20km
jam × 4 jam = 80 𝑘𝑚
Gambar 2.3 menjelaskan sebuah benda yang awalnya diam, kecepatannya bertambah menjadi 30 m/s dalam 6 detik, tingkat peningkatan kecepatannya (disebut percepatan) konstan.
Grafik kecepatan terhadap waktu
Luas yang terlingkupi oleh grafik = jarak tempuh
= 20 x 4
Grafik kecepatan terhadap waktu
MEKANIKA TERAPAN 45 Gambar 2.3 sebuah benda yang awalnya diam, kecepatannya bertambah menjadi 30 m/s dalam 6
detik dengan percepatan konstan
Daerah yang dilingkupi oleh grafik = Luas segitiga
=12 × 30 × 6
= 90 𝑠𝑎𝑡𝑢𝑎𝑛 𝑗𝑎𝑟𝑎𝑘 atau dengan persamaan,
Jarak = laju rata − rata × waktu 𝑠 = 𝑣̅ × 𝑡
= 1/2(0 + 30) × 6 = 90 𝑚
Sekali lagi daerah yang dilingkupi grafik kecepatan waktu merepresentasikan perpindahan (jarak tempuh). Selanjutnya, pada setiap detik peningkatan kecepatan adalah 5 m/s, ini adalah percepatan 5 m/s2 yang digambarkan oleh slope/gradien/kemiringan grafik. Percepatan yang besar akan ditunjukkan dengan slope/gradien yang lebih curam, perlambatan akan ditunjukkan dengan slope/gradien yang arah kemiringannya berlawanan.
Gambar 2.4 menunjukkan sebuah kapal yang diperlambat dari 16 knots menuju 10 knots dalam waktu 12 menit.
Jarak tempuh selama waktu itu adalah
𝑠 = 𝑣̅ × 𝑡
= 16 + 102 ×1260
= 2,6 nautical miles
Kapal kehilangan 6 knots dalam 12 menit yang ekuivalen dengan 30 knots dalam 60 menit. Jadi perlambatan dalam satuan yang sama dengan satuan pada grafik adalah:
Perlambatan = 30 knots per jam
Atau jika dinyatakan dalam satuan m/s2 menjadi:
1 𝑘𝑛𝑜𝑡 = 1,852𝑗𝑎𝑚𝑘𝑚
MEKANIKA TERAPAN 46
= 4,287 × 10−3 𝑚/𝑠2
Gambar 2.4 Sebuah kapal yang diperlambat dari 16 knots menuju 10 knots dalam waktu 12 menit.
Contoh :
Sebuah kereta yang awalnya diam, kemudian bergerak hingga mencapai kecepatan 90 km/jam dalam 25 detik. Kemudian selama 1,5 menit kereta bergerak dengan kecepatan tersebut, kemudian kecepatannya berkurang sampai berhenti dalam 20 s. Anggap percepatan dan perlambatan beraturan(uniform), gambarkan grafik v-t, hitunglah total jarak yang dilalui dan nyatakan percepatan dan perlambatan dalam m/s2.
0
Grafik kecepatan terhadap waktu
0
MEKANIKA TERAPAN 47
Gambar 2.5 Grafik v-t
90𝑗𝑎𝑚 =𝑘𝑚 90 × 103600 𝑚/𝑠3
= 25 𝑚/𝑠
Luas dibawah garis percepatan = 0,5 × 25 × 25 = 312,5 m Luas dibawah garis kecepatan konstan = 25 × 90 = 2250 m Luas dibawah garis perlambatan = 0,5 × 25 × 20 = 250 m
Jarak tempuh total = Total Luas = 312,5 + 2250 + 250 = 2812,5 m
Percepatan =peningkatan kecepatan
waktu =
25 m/s
25 s = 1 m/s2
Perlambatan =Penurunan kecepatanwaktu =25 m/s20 s = 1,25 m/s2
Persamaan-Persamaan pada Gerak
Meskipun semua permasalahan-permasalahan dapat dikerjakan dengan prinsip-prinsip tersebut, namun kadang lebih mudah untuk menyelesaikannya dengan persamaan.
Simbol yang biasa digunakan adalah sebagai berikut:
𝑣𝑡= kecepatan awal (m s⁄ ) 𝑣𝑜= kecepatan awal (m s⁄ ) 𝑎 = percepatan (m s⁄ )2 𝑡 = waktu (s)
𝑠 = jarak tempuh (m)
Ada empat persamaan umum yang berkaitan dengan kecepatan linier, percepatan, waktu dan perpindahan, yaitu:
𝑣𝑡 = 𝑣𝑜+ 𝑎𝑡
𝑠 = 𝑣̅𝑡 = (𝑣0 + 𝑣2 ) 𝑡𝑡
MEKANIKA TERAPAN 48
𝑣𝑡2 = 𝑣𝑜2± 2𝑎𝑠
Persamaan di atas menggunakan tanda (±) plus atau minus tergantung bagaimana percepatan geraknya. Tanda (+) untuk percepatan positif (gerak dipercepat), sedangkan tanda (-) untuk percepatan negatif (gerak diperlambat).
Contoh.
Sebuah kapal bergerak dengan kecepatan awal 10 m/s, kemudian diberikan percepatan tetap 2 m/s2 selama 6 detik. Hitunglah kecepatan pada akhir 6 detik dan jarak tempuh selama waktu tersebut!
𝑣𝑜= 10𝑚𝑠
𝑎 = 2𝑚𝑠
𝑡 = 6 𝑠 𝑣𝑡= 𝑣𝑜+ 𝑎𝑡
Setelah 6 s,
𝑣𝑡= 10 + (2 × 6) = 22 𝑚/𝑠
𝑠 = 𝑣𝑜𝑡 ±12 𝑎𝑡2
𝑠 = 10 × 6 +12 × 2 × 62
𝑠 = 60 + 36 = 96 𝑚
Contoh.
Propeller kapal dihentikan ketika berjalan pada laju 25 knots, dan sejak propeller dimatikan kapal masih menempuh jarak 4 km hingga berhenti. Hitunglah waktu yang diperlukan untuk berhenti dalam menit, dan perlambatan rata-rata dalam m/s2. 1 knot = 1,852 km/jam.
𝑣0 = 25 𝑘𝑛𝑜𝑡𝑠 = 25 ×1852 𝑚3600 𝑠 = 12,86 𝑚/𝑠
MEKANIKA TERAPAN 49
𝑣𝑡2 = 𝑣02+ 2𝑎𝑠
02 = 12,862+ 2 × 𝑎 × 4000
𝑎 =−165,37968000
𝑎 = −0,02067 𝑚/𝑠2
Tanda minus menunjukkan gerak diperlambat dengan perlambatan 0,02067 m/s2.
Gerak Yang Dipengaruhi Gravitasi (Gerak Vertikal)
Bumi menarik semua benda mengarah ke pusat bumi sehingga benda akan mengalami gerak jatuh bebas, dengan mengabaikan hambatan udara maka benda akan jatuh bebas ke bumi dengan percepatan tetap. Percepatan tersebut merupakan percepatan gravitasi, nilainya bervariasi tergantung kedudukannya di permukaan bumi namun diambil rata-rata 9,81 m/s2dan direpresentasikan dengan ‘g ’. Sehingga jika benda yang awalnya diam kemudian jatuh maka kecepatannya bertambah 9,81 m/s setiap detiknya.
Contoh.
Sebuah benda jatuh dari keadaan diam. Hitunglah kecepatan setelah jatuh selama 4 detik dan jarak tempuh selama waktu tersebut.
𝑣𝑡 = 𝑣𝑜+ 𝑎𝑡
Dalam gerak vertikal a = g
𝑣𝑡 = 𝑣𝑜+ 𝑔𝑡 = 0 + 9,81 × 4
Kecepatan akhir vt = 39,24 m/s
𝑠 = 𝑣𝑜𝑡 ±12 𝑎𝑡2
Dalam gerak vertikal s = h
ℎ = 𝑣𝑜𝑡 +12 𝑔𝑡2
= 0 × 4 +12 × 9,81 × 42
Jarak jatuh = 78,48 m
MEKANIKA TERAPAN 50
Sebuah proyektil ditembakkan vertikal ke atas dengan kecepatan awal 300 m/s. Hitunglah (i) kecepatannya setelah 20 s, (ii) ketinggian diatas tanah setelah 20 s, (iii) waktu yang diperlukan untuk mencapai puncak ketinggian, (iv) ketinggian maksimum yang dicapai, waktu tempuh total dari meninggalkan tanah sampai kembali ke tanah.
𝑣𝑡= 𝑣𝑜− 𝑔𝑡
= 300 − 9,81 × 20
Kecepatan pada detik ke-20 = 103,8 𝑚/𝑠
ℎ = 𝑣𝑜𝑡 +12 𝑔𝑡2
= 300 × 20 +1
2 × 9,81 × 202
Ketinggian = 4038 𝑚
0 = 300 − 9,81 × 𝑡
𝑡 =9,81300
Waktu untuk mencapai ketinggian maksimum = 30,58 𝑠
𝑣𝑡2 = 𝑣𝑜2− 2𝑔ℎ
0 = 3002− 2 × 9,81 × ℎ
ℎ =2 × 9,81 = 4587 𝑚3002
Ketinggian maksimum = 4587 m
Waktu total = 2 × 30,58 = 61,16 s.
2.2 Harga Sesaat
Untuk benda yang bergerak lurus, berdasarkan kemiringan grafik s-t dan v-t, diperoleh harga sesaat,
𝑣 = lim∆𝑡→0∆𝑠∆𝑡 =𝑑𝑠𝑑𝑡
𝑎 = lim∆𝑡→0∆𝑣∆𝑡 =𝑑𝑣𝑑𝑡 =𝑑𝑑𝑡2𝑠2
Dari daerah di bawah grafik v-t dan a-t,
MEKANIKA TERAPAN 51
𝑣 = ∫ 𝑎 𝑑𝑡
Contoh:
Kecepatan sebuah benda pada waktu t dinyatakan oleh persamaan berikut:
𝑣 = 3𝑡2− 4𝑡 𝑚/𝑠
Hitunglah perpindahan, kecepatan, percepatan setelah bergerak 3 detik dari diam.
𝑠 = ∫ 𝑣 𝑑𝑡
= ∫ (3𝑡3 2− 4𝑡)
0 𝑑𝑡
= [𝑡3 − 2𝑡2]3 0 = 27 − 18 = 9 𝑚
Jadi perpindahan = 9 m setelah 3 detik.
𝑣 = 3𝑡2− 4𝑡 = 27 − 12 = 15𝑚 𝑠
Kecepatan = 15 m/s pada detik ke 3.
𝑎 =𝑑𝑣𝑑𝑡
=𝑑𝑡𝑑 (3𝑡2− 4𝑡) = 6𝑡 − 4 = 14𝑚 𝑠2
Percepatan = 14 m/s2 setelah 3 s.
2.3 Perubahan Kecepatan
MEKANIKA TERAPAN 52 Gambar 2.6 Contoh perubahan kecepatan
Tinjau contoh sederhana Gambar 2.6 yang mengilustrasikan diagram ruang dan vektor kecepatan.
Kasus A menyatakan benda bergerak 5 m/s ke timur, mengalami perubahan kecepatan menjadi 12 m/s ke timur. Vektor masing masing kecepatan digambar dari titik yang sama, perbedaan antara ujung-ujung vektor adalah perubahan kecepatan, dalam kasus ini adalah 7 m/s.
Kasus B adalah sebuah benda dengan kecepatan awal 9 m/s ke timur, berubah menjadi 2 m/s ke barat. Vektor diagram menunjukkan vektor masing-masing kecepatan digambar dari titik yang sama, perbedaan antara titik ujung mereka adalah perubahan kecepatan yaitu 11m/s.
Kasus 3 adalah sebuah benda dengan kecepatan awal 6 m/s ke timur berubah menjadi 8 m/s ke selatan. Diagram vektor dibentuk pada prinsip yang sama dari dua vektor yang digambar dari sebuah titik yang sama. Perubahan kecepatan adalah selalu merupakan perbedaan antara ujung-ujung bebas kedua vektor, yaitu √82+ 62 = 10 m/s. Arah perubahan kecepatan adalah S36°52’W. Perubahan kecepatan mengambil tempat dalam arah gaya kerja yang diberikan yaitu antara perubahan dari timur ke baratdaya.
Pada semua kasus, diagram vektor dibentuk dengan menggambar vektor-vektor kecepatan dari sebuah titik yang sama. Ini disebut dengan pengurangan vektor.
MEKANIKA TERAPAN 53
Contoh:
Sebuah pesawat terbang mengalami perubahan kecepatan dari 400 km/jam berarah barat menjadi 500 km/jam berarah timur laut dalam ½ menit. Hitunglah kecepatan rata-rata dalam m/s2.
Gambar 2.7 Diagram ruang dan diagram vektor
𝑎2 = 𝑏2+ 𝑐2 − 2𝑏𝑐 cos 𝐴
= 5002+ 4002− 2 × 500 × 400 × cos 135 ° = 250000 + 160000 + 282800
𝑎 = √692800 = 832,4
Jadi perubahan kecepatan adalah 832,4 km/jam
Percepatan =perubahan kecepatanselang waktu
=832,4 × 103600 × 303
= 7,707
Jadi besar percepatan adalah 7,707 m/s2.
2.4 Kecepatan Relatif
Penjelasan di atas hanya untuk kecepatan objek bergerak melewati titik-titik tetap pada bumi (sebagai acuan), yang mana ini disebut dengan kecepatan absolut/mutlak.
MEKANIKA TERAPAN 54 Gambar 2.8 Contoh kecepatan relatif/semu obyek-obyek berkecepatan sama
bergerak searah dan sejajar
Jika dua obyek bergerak sejajar dengan kecepatan tetap seperti pada gambar 2.8, kecepatan relatif satu dengan yang lain adalah nol. Sebagai contoh ketika dua orang duduk saling menatap di dalam sebuah kereta api bergerak yang sama, mata satu sama lain tidak bergerak, kecepatan semu satu terhadap lainnya adalah nol.
Akan tetapi, jika sebuah obyek bergerak dalam arah berlawanan terhadap obyek yang lainnya misalkan kereta yang bergerak sejajar dalam arah berlawanan, masing masing berkecepatan 50 km/jam seperti diilustrasikan oleh gambar 2.9, obyek satu akan melihat obyek lain dengan kecepatan 100 km/jam, sehingga kecepatan relatif satu terhadap yang lain adalah 100 km/jam.
Gambar 2.9 Contoh kecepatan relatif/semu obyek-obyek berkecepatan sama bergerak berlawanan arah dan sejajar
Kecepatan relatif obyek-obyek yang bergerak saling sejajar sederhana dan mudah dipahami, tetapi ketika tidak saling sejajar maka agak rumit dan diperlukan menggambar diagram-diagram vektor.
Tinjau sebuah benda A bergerak 30 m/s ke timur dan benda lain B bergerak 35 m/s 20o ke utara dari timur. Diagram ruang pertama digambar untuk menunjukkan kecepatan absolut masing-masing, sebagaimana kecepatan tersebut relatif terhadap bumi, diberi tanda A atau B di belakang vektor, dan E (untuk bumi) pada ujung vektor. Lihat gambar 2.10.
Diagram vektor sekarang dapat digambar dengan E sebagai sebuah titik bersama untuk dua kecepatan absolut, kecepatan relatif dari A ke B, atau dari B ke A, adalah vektor penghubung dua pangkal vektor. Jika kecepatan B relatif terhadap A yang dicari, panah ditaruh pada titik dari B ke A dan menggambarkan bagaimana gerak obyek B menurut pandangan A. Jika kecepatan A relatif terhadap B yang dicari, panah ditaruh pada titik dari A ke B dan menggambarkan bagaimana gerak obyek A menurut pandangan B. Ini adalah pengurangan vektor.
A
B
50 km/jam
50 km/jam
A
B 50 km/jam
MEKANIKA TERAPAN 55 Gambar 2.10 Kecepatan B relatif terhadap A
Contoh:
Kapal pertama A berlayar ke barat dengan kecepatan 19 knots dan kapal lain B yang jaraknya 5 nautical miles barat daya dari A berlayar ke utara 30o ke timur dengan kecepatan 17 knots. Hitung jarak antara dua kapal ketika mereka berada pada posisi terdekat satu sama lain. Hitunglah waktu saat mereka berada pada posisi terdekat satu sama lain.
Gambar 2.11
𝑉𝑅2 = 172+ 192 − 2 × 17 × 19 × cos 120° = 289 + 361 + 323
𝑉𝑅 = √973 = 31,19 knots
17 sin 𝜃 =
MEKANIKA TERAPAN 56
sin 𝜃 =17 × 0,86631,19 = 0,472
𝜃 = 28° 10′
Kecepatan B relatif terhadap A adalah 31,19 knots berarah 28° 10′ ke utara dari timur. Sekarang bayangkan jika berada di kapal A diam semu dan melihat kapal B, yang mana jaraknya 5 nautical miles arah barat daya, bergerak dengan laju semu 31,19 knots dalam arah 28° 10′ ke utara dari timur. Sebuah diagram ruang untuk jarak sekarang kita gambar untuk merepresentasikan kondisi semu ini sebagaimana dalam gambar 2.12.
Gambar 2.12
𝑆𝑢𝑑𝑢𝑡 𝛼 = 45° − 28°10′= 16°50′
𝐴𝐵2 = jarak terdekat (𝑛𝑒𝑎𝑟𝑒𝑠𝑡 𝑎𝑝𝑝𝑟𝑜𝑎𝑐ℎ) = 5 × sin 16° 50′ = 1,448 naut. miles
Jarak semu (apparent distance) yang ditempuh oleh B untuk memperoleh posisi jarak terdekat (nearest approach) = 𝐵1𝐵2 = 5 × cos 16° 50′= 4,7855 𝑛𝑎𝑢𝑡𝑖𝑐𝑎𝑙 𝑚𝑖𝑙𝑒𝑠
Untuk menempuh 4,7855 nautical miles pada laju semu (apparent speed) 31,19 knots:
𝑊𝑎𝑘𝑡𝑢 =𝑗𝑎𝑟𝑎𝑘𝑙𝑎𝑗𝑢 =4,7855 × 6031,19 = 9,2 min
2.5 Gaya Gesek
MEKANIKA TERAPAN 57
Ketika kita menarik balok tersebut secara horisontal maka akan mengalami hambatan akibat adanya gaya normal dan kekasaran permukaan. Gaya hambat ini disebut dengan gaya gesek. Gaya gesek bekerja dalam arah yang berlawanan terhadap arah gerak balok tersebut. Sehingga, dimanapun setiap ada gerakan relatif antara dua bagian, gaya gesek muncul, sehingga untuk mengatasi gesekan sejumlah energi akan terbuang.
Gaya gesek dapat juga disebut sebagai gaya yang timbul pada dua bidang permukaan benda yang bersinggungan dan mempunyai kekasaran dan arah gaya gesek melawan arah kecenderungan gerak benda.
Gambar 2.13 Gaya gesek
Dalam aplikasi teknik gesekan dapat diinginkan maupun tidak diinginkan. Ada peralatan dan perangkat yang dikenal sebagai piranti gesek seperti sabuk dan tali, gesekan kopling, rem, mur dan baut, yang mana gesekan menguntungkan dan upaya dilakukan untuk memaksimalkan gesekan tersebut. Dan sebaliknya, gesekan sangat tidak diinginkan pada bagian-bagian bergerak mesin, yang mana menyebabkan kehilangan energi yang dapat menghasilkan perubahan bentuk energi menjadi energi panas. Untuk meningkatkan efisiensi mesin, gesekan harus dikurangi seminim mungkin dengan pelumasan (lubrication).
Karakteristik Gaya Gesek
Gaya gesek memiliki karakteristik sebagai berikut:
(i) Seft-adjusting, ketika gaya tarik F meningkat, gaya gesek f juga meningkat, dan sampai suatu saat ketika benda akan bergerak maka sejumlah gaya gesek akan muncul untuk melawan arah gerakan benda.
(ii) Gaya gesek selalu bekerja dalam arah yang berlawanan terhadap arah gerakan (selalu melawan arah gaya tarik F)
(iii) Gaya gesek adalah gaya pasif (gaya gesek ada jika gaya tarik F ada)
Tipe Gaya Gesek
Gaya gesek dapat diklasifikasikan sebagai berikut: 1. Gesekan pada permukaan tanpa pelumas 2. Gesekan pada permukaan berpelumas
F (Gaya)
f (Gaya gesek)
MEKANIKA TERAPAN 58
Pada gesekan permukaan tanpa pelumas, gesekan yang muncul antara dua permukaan tak berpelumas disebut gesekan solid atau gesekan kering. Ini dapat terbagi menjadi dua tipe, yaitu:
(i) Sliding friction (gesekan luncur), yaitu gesekan yang muncul ketika sebuah permukaan benda meluncur diatas permukaan lain.
(ii) Rolling friction (gesekan bergulir), yaitu gesekan ketika antara kedua permukaan terpisah oleh gotri (bola-bola kecil) atau laker/roller.
Harus diingat bahwa gesekan bergulir selalu lebih kecil daripada gesekan luncur.
Pada Gesekan pada permukaan berpelumas, lebih lanjut dibagi menjadi berikut: (i) Gesekan licin atau tak kental (boundary friction),
(ii) Gesekan viscous (kental)
Jika diantara dua permukaan gesekan ada sebuah lapisan tipis minyak atau pelumas, minyak akan terserap ke dalam permukaan. Sebagai akibatnya kontak antara logam-logam akan digantikan dengan kontak antar lapisan tipis minyak dan tentu saja gaya gesekan akan terkurangi. Dalam kasus seperti itu gaya gesekan disebut sebagai gesekan licin (boundary friction).
Pada bab ini kita hanya akan membahas gesekan antar permukaan yang tak terlumasi.
Batas Gesekan
Gambar 2.14 menunjukkan sebuah grafik antara gaya kerja dan gesekan. Selama kondisi statis dimana gaya kerja meningkat dari nilai nol, gaya gesek juga akan naik sebanding dengan gaya kerja. Pada kondisi tertentu ketika gaya kerja tepat cukup untuk melampaui gesekan maka benda akan bergerak. Setelah itu tiba-tiba besar gesekan menurun menuju suatu nilai yang tetap konstan sepanjang waktu bergerak, seperti ditunjukkan gambar 2.14
MEKANIKA TERAPAN 59
Ketika gerak tepat akan terjadi, gaya gesek mengalami nilai maksimum. Kondisi ini disebut dengan batas keseimbangan (limitting equilibrium). Gesekan yang bekerja pada kondisi ini disebut batas gesekan (limitting friction).
Batas gaya gesek ini dapat didefinisikan sebagai harga maksimum gaya gesek yang muncul ketika benda tepat akan bergerak pada permukaan benda lain. Ketika gaya kerja lebih kecil dari pada batas gesekan maka benda tetap diam, dan gesekan disebut sebagai gesekan statis, yang nilainya antara nol sampai batas gesekan (limitting friction).
Hukum Gesekan
Hukum gesekan statis dinyatakan sebagai berikut:
(i) Gaya gesek selalu bekerja dalam arah yang berlawanan dengan arah kecenderungan gerak benda
(ii) Besar gaya gesek berbanding lurus dengan gaya normal antara kedua permukaan.
(iii) Besar gaya gesek tergantung pada kondisi permukaan bidang kontak.
(iv) Gaya gesek tidak tergantung pada luas dan bentuk permukaan bidang kontak. Hukum gesekan dimanis atau kinetis:
(i) Gaya gesek selalu bekerja dalam arah yang berlawanan dengan arah kecenderungan gerak benda
(ii) Besar gaya gesek berbanding lurus dengan gaya normal antara kedua permukaan.
(iii) Besarnya gaya gesek dinamis menghasilkan rasio tetap terhadap gaya normal antara dua permukaan tetapi rasionya adalah sedikit lebih kecil daripada keadaan batas gesekan (limitting friction)
(iv) Gaya gesekan mendekati konstan pada laju sedang tetapi berkurang sedikit seiring dengan meningkatnya laju.
Sudut gesekan
MEKANIKA TERAPAN 60
Sudut gesekan adalah sudut yang dibentuk antara Gaya Normal (N) dengan resultan (R) dari Gaya Normal (N) dan gaya gesek batas(f ). Sudut gesekan diberi simbol 𝜙.
tan 𝜙 =𝑁𝑓
𝜙 = tan−1𝑓 𝑁
Koefisien Gesekan
Koefisien gesekan didefinisikan sebagai perbandingan antara gaya gesek batas (f ) terhadap gaya Normal (N) antara dua benda yang bergesekan. Koefisien gesekan diberi simbol 𝜇.
𝜇 = tan 𝜙 =𝑁𝑓
Sehingga besar gaya gesekan dapat dirumuskan dengan persamaan
𝑓 = 𝜇𝑁
dengan 𝑁 adalah gaya normal (satuan Newton), yaitu gaya yang merupakan gaya reaksi bidang tempat benda berada terhadap gaya aksi yang diberikan benda dan mempunyai arah yang tegak lurus terhadap bidang tempat benda tersebut, sedangkan 𝜇 adalah koefisien gesekan yang menyatakan tingkat kekasaran permukaan bidang kontak.
Gesekan statis dan dinamis
Gaya gesek ada dua macam yaitu:
a) Gaya gesek statis (𝑓𝑠) adalah gaya gesek yang dialami benda dalam keadaan diam atau tepat akan mulai bergerak. Jika 𝜇𝑠 adalah koefisien gesek statis, maka
𝑓𝑠 = 𝜇𝑠. 𝑁
b) Gaya gesek kinetis (𝑓𝑘) adalah gaya gesek yang dialami benda dalam keadaan sedang bergerak. Gaya gesek kinetis selalu lebih kecil dari pada gaya gesek statis (gesekan kinetis sekitar 40 sampai 75 persen dari gaya gesek statis maksimum). Jika 𝜇𝑘 adalah koefisien gesekan kinetis, maka:
𝑓𝑘 = 𝜇𝑘. 𝑁
Koefisien gesek adalah konstanta yang menunjukkan sifat kasar licinnya permukaan dua
bidang yang bersentuhan. Nilai koefisien gesek berkisar antara 0 ≤ µ ≤ 1.
Sudut Istirahat (Angle of Repose)