PERENCANAAN DAN PEMBUATAN
ALAT PENGISI BUBUK KOPI
Dwi Wisnu Susilo (1), Judi Prajetno Sugiono (2)
Jurusan Teknik Elektro, Sekolah Tinggi Teknik Surabaya
e-mail:jpsugiono@stts.edu(2)
ABSTRAK
Banyak barang kemasan yang diperjualbelikan dengan satuan berat barang, salah satunya adalah produk yang berbentuk biji (granule) atau bubuk (powder). Pengukuran berat barang biasanya dilakukan oleh mesin, menggunakan konversi berat ke volume, atau menggunakan timbangan. Pengukuran berat menggunakan konversi berat ke volume dirasakan memiliki kesalahan yang cukup besar, dan hanya cocok dipakai jika berat yang diukur dalam satuan ukuran yang besar. Dalam penelitian diidentifikasi bahwa metode in hanya cocok untuk mengukur berat 250 gram ke atas. Pada penelitian ini akan digunakan sensor berat (load cell) sebagai alat untuk mengukur berat. Dengan dipergunakannya sensor berat diperoleh akurasi yang lebih baik dan fleksibilitas yang lebih luas, karena berat yang diinginkan dapat ditentukan tanpa harus melakukan setup yang rumit.
Kata kunci: Mesin Pengisi Bubuk Kopi, Load Cell
ABSTRACT
Many packaged goods are bought and sold with a unit weight of the goods, one of which is a product in the form of seeds (grains) or powder (powder). Measurements of heavy goods usually done by machine, using the weight to volume conversion, or use the scales. Measurement of weight using the weight to volume conversion perceived to have fairly large error, and only suitable if the weight is measured in units of large size. In the study identified that in only suitable method for measuring the weight of 250 grams or more. This research will use the weight sensor (load cell) as a tool to measure the weight. With a weight sensor used to obtained better accuracy and greater flexibility, because the desired weight can be determined without having to perform complicated setup.
Keywords: Coffee Powder Filling Machine, Load Cell.
PENDAHULUAN
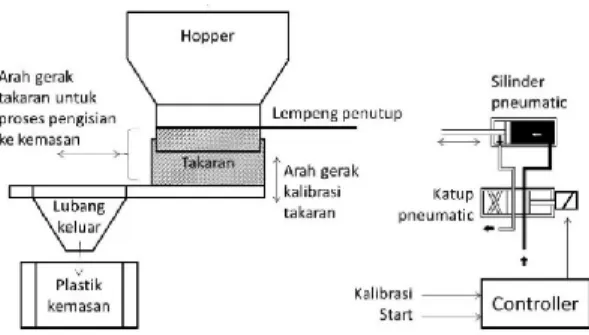
Dalam penelitian yang dilakukan sebelumnya pada produksi bubuk kopi, dilakukan pembuatan Alat Pengisi Biji Kopi dipergunakan metode konversi berat ke volume. Berat yang diinginkan dinyatakan dalam sebuah tabung takaran yang volumenya sudah disesuaikan. Jika kemasan sudah siap, maka pengisian dilakukan dengan membuka tabung takaran dengan tenaga pneumatic. Alat ini harus dikalibrasi ulang setiap kali terjadi pergantian jenis biji kopi, karena faktor besar kecil biji, tingkat kekeringan biji akan berpengaruh pada berat, dan karenanya volume tabung takaran bisa jadi tidak sesuai dengan berat yang diinginkan. Dari observasi lanjutan, alat ini hanya cocok jika berat yang diukur di atas 250 gram.
Gambar 1: Desain alat pengisi biji kopi dengan konversi berat ke volume
Dalam penelitian ini di desain sebuah alat pengisi untuk kopi berbentuk bubuk (powder) dengan pengukur berat kopi menggunakan load cell sehingga penimbangan menjadi lebih fleksibel. Dasar pembuatan alat ini menggunakan
mikro-kontroller AVR ATMEGA16 yang akan mengendalikan kegiatan mesin selama mesin beroperasi. Dalam mesin ini akan ditambahkan sensor berat load cell yang akan mengukur berat. Sebuah LCD display dan keypad dipasang untuk menjembatani setting yang harus dilakukan oleh operator.
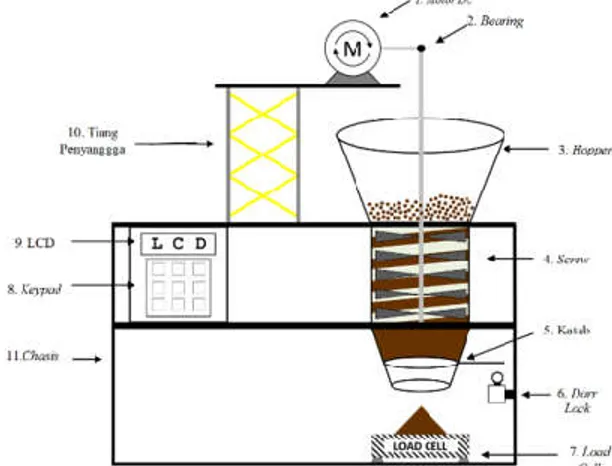
Prinsip kerja dari alat yang didesain terlihat seperti pada gambar 2. Pertama kali dilakukan setting berat yang diukur lewat keypad. Bubuk kopi yang disimpan dalam hooper akan diturunkan oleh screw yang diputar oleh motor, untuk dimasuk ke dalam kemasan yang disiapkan.
Gambar 2: Desain Alat Pengisi Bubuk Kopi
Dipergunakannya screw selain untuk mendorong
turunnya bubuk kopi, juga untuk mengatasi tekanan berat yang sampai di timbangan, yang mungkin membuat hasil ukur menjadi salah. Dibawah kemasan diletakkan load cell, yang menimbang berat dari bubuk kopi yang jatuh. Jika berat sudah mencapai angka yang diinginkan pintu hopper ditutup oleh door lock dan motor screw dimatikan.
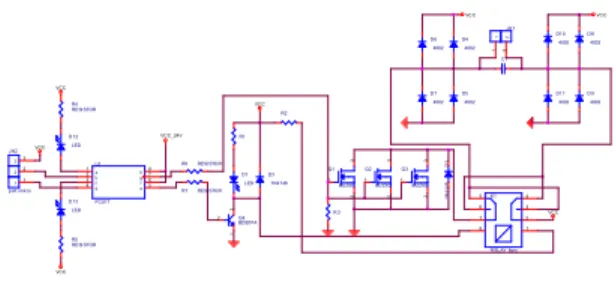
DESAIN RANGKAIAN
Gambar 3: Blok Rangkaian Elektronik
Kunci dari alat ini adalah sejumlah rangkaian seperti pada gambar 3. Alat ini terdiri blok pengendali yang dibuat dengan mikrokontroller
ATMEGA 16, rangkaian driver untuk
menggerakkan motor DC, rangkaian driver untuk menggerakkan katup penutup hopper, dan penguat instrumentasi untuk mengambil hasil ukur dari load cell. Selain itu dipasang juga sepasang keypad dan
LCD untuk memasukkan parameter yang
diinginkan.
1. MIKROKONTROLLER ATMEGA16
AVR merupakan seri mikrokontroler CMOS 8-bit
buatan Atmel, berbasis arsitektur RISC (Reduced
Instruction Set Computer) yang ditingkatkan. Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general purpose, timer atau counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial
UART, programmable Watchdog Timer, dan mode
power saving. Mempunyai ADC dan PWM internal.
AVR juga mempunyai In-System Programmable
Flash on-chip yang mengizinkan memori program untuk diprogram ulang dalam sistem menggunakan
hubungan serial SPI. ATmega16 adalah
mikrokontroler CMOS 8-bit daya-rendah ber-basis arsitektur RISC yang ditingkatkan.
1. Flash memori program ada di dalam chip (on-chip) dan mempunyai kemampuan In System Programmable (ISP). Semua prosesor keluarga AVR memiliki memori flash yang dapat diprogram dengan dua mode yaitu: paralel dan serial.
2. Prosesor AVR dilengkapi dengan memori
EEPROM dan RAM. Pada Arsitektur Havard EEPROM dan RAM dianggap sebagai memori data untuk menyimpan konstanta dan variabel.
3. Frekuensi clock sampai dengan 8 MHz, hampir
semua instruksi beroperasi dalam 1 cycle clock, berarti hampir 10 kali lebih cepat dibandingkan dengan prosesor konvensional lainnya, pada frekuensi clock yang sama.
4. Rangkaian power on reset.
5. On-chip programmable timer dengan prescalar
terpisah. Ini digunakan untuk aplikasi timer.
6. Internal dan eksternal interupsi.
7. Programmable Watchdog timer dengan osilator
sendiri dapat digunakan untuk men-debug software yang dibuat.
8. Mode operasi idle, power down dan power safe
untuk menghemat daya ketika prosesor dalam mode sleep.
9. Mempunyai 32 general purpose working
banyak variabel yang dapat disimpan dalam CPU dibanding dengan variabel diletakkan dalam memori data yang membutuhkan waktu akses yang lebih lama dan dengan cara ini akan mempercepat jalannya program.
Gambar 4 menunjukkan ATmega 16 yang menggunakan crystal 8MHz untuk rangkaian pembangkit clock. Sejumlah port output dari ATmega 16 digunakan untuk disambungkan dengan
rangkaian LCD (liquid crystal display) yang
merupakan bagian tampilan pada alat ini. Keypad sebagai input nilai untuk menentukan berat, tersambung juga pada mikrokontroler ini.
Gambar 4: Rangkaian mikrokontroler ATmega 16 Penggunaan port ATMEGA 16 ditentukan dalam segmen program 1 di bawah. Segmen program ini berisikan pengaturan Inisialisasi Port, Inisialisasi Timer/Counter, Inisialisasi External Interrupt Segmen program 1: Inisialisasi port
01. // I/O Ports initialization
02. // Port A initialization 03. PORTA =0x00; 04. DDRA =0x00; 05. // Port B initialization 06. PORTB =0x00; 07. DDRB =0x0F; 08. // Port C initialization 09. PORTC =0x00; 10. DDRC =0x00; 11. // Port D initialization 12. PORTD =0xFF; 13. DDRD =0xFF;
Port A hanya satu pin yang digunakan yaitu PA0, pin ini digunakan untuk membaca ADC dari
rangkaian Instrumentation Amplifier. Port B
digunakan sebagai modul ISP (In System Programmer), kaki-kaki yang digunakan adalah MISO, MOSI dan SCK. Selain digunakan untuk ISP
semua pin port B juga digunakan untuk keypad. Port C di mana semua pin dari port C digunakan untuk mengatur tampilan LCD kecuali kaki pin PC3. Port D ini banyak digunakan untuk mengontrol tombol push button, motor dan door lock. Pin yang digunakan adalah PD1, PD2 digunakan untuk push button, PD3, PD4 digunakan untuk mengatur door lock dan PD5, PD6 digunakan untuk mengatur motor.
2. KEYPAD
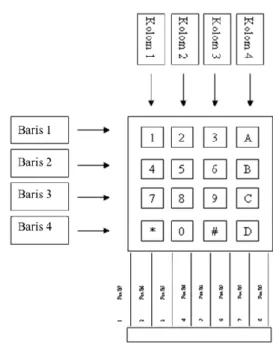
Gambar 5: Struktur Keypad dengan prinsip scanning Keypad yang digunakan pada alat ini adalah keypad 4X4. Segmen program 2 menjelaskan perintah pada operasi keypad. Modul keypad bekerja berdasarkan prinsip scanning. Keluaran dari modul keypad berupa delapan pin, yaitu empat pin baris dan empat pin kolom. Ketika ada penekanan pada salah satu tombol pada keypad, maka baris dan kolom dari tombol yang ditekan akan tersambung, cara membaca masukan dari keypad.
Segmen Program 2: Program Untuk scan Keypad
01. ScanCode[16]={0x7D,0xEE,0xED,0xEB,0x
DE,0xDD,0xDB,0xBE,0xBD,0xBB,0xE7,0xD 7,0xB7,0x77,0x7E,0x7B};
02. //0 1 2 3 4 5 6 7
8 9 A B C D * #
03.unsigned char ScanKey (void)
04.{
05. Unsigned char i,j,u1=0xFF,u2=0xFF;
06.for (i=0;i<4;i++) 07.{ 08.PORTB=~(1<<i); 09.delay_ms(1); VCC C2 33pf U1 ATmega 16 1 2 3 4 5 6 7 8 9 10 11 13 23 22 21 20 19 18 17 16 15 14 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 12 PB0(XCK/TO) PB1(T1) PB2(INT2/AIN0) PB3(OC0AIN1) PB4(SS) PB5(MOSI) PB6(MISO) PB7(SCK) RESET VCC GND XTAL2 PC1(SDA) PC0(SCL) PD7(OC2) PD6(ICP1) PD5(OC1B) PD4(OC1A) PD3(INT1) PD2(INT0) PD1(TXD) PD0(RXD) PC2 PC3 PC4 PC5 PC6(TOSC1) PC7(TOSC2) AVCC AGND AREF PA7(ADC7) PA6(ADC6) PA5(ADC5) PA4(ADC4) PA3(ADC3) PA2(ADC2) PA1(ADC1) PA0(ADC0) XTAL1 C1 33pf Y 1 8Mhz ISP 1 2 3 4 5 6 VCC
10.for (j=0;j<16;j++){ 11.if (PINB==ScanCode[j]) u1=j; 12.} 13.} 14.delay_ms(25); 15.if (u1!=0xFF) 16.{ 17.for (i=0;i<4;i++) 18.{ 19.PORTB=~(1<<i); 20.delay_ms(1); 21.for (j=0;j<16;j++) 22.{ 23.if (PINB==ScanCode[j]) u2=j; 24.} 25.} 26.}else return(0xFF);
27.if (u1==u2) return (u1);
28.return(0xFF);
29. }
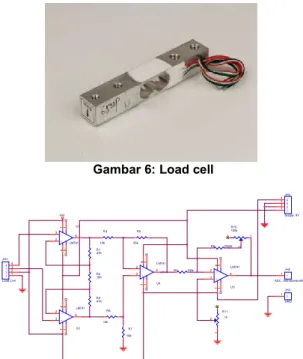
3. LOAD CELL
Load cell adalah sebuah sensor gaya yang banyak digunakan untuk mengukur berat. Load Cell pada
dasarnya adalah sebentuk foil metal strain gauges
(SG). Strain dari muncul sebagai pengaruh dari pembebanan yang berupa perubahan resistansi strain gauge yang linier dengan gaya berat yang dipasang.
Gambar 6: Load cell
Gambar 7: Rangkaian Instrumentation Amplifier Sinyal output load cell cukup kecil dalam orde mV tidak bisa dibaca langsung oleh mikrokontroller,
untuk itu dipasang sebuah rangkaian
Instrumentation Amplifier. Tegangan output load cell, dikuatkan dalam orde Volt
Proses pengambilan data pada sensor berat (load cell) dilakukan lewat Instrumentation Amplifier, dan kemudian diumpankan ke port ADC dari ATMEGA 16. Segmen program 3 berikut ini adalah segmen program yang digunakan untuk membaca tegangan output dari rangkaian instrumentation amplifier.
Segmen program 3: Pembaca ADC
01. // Read the AD conversion result
02. unsigned int read_adc(unsigned char
adc_input)
03. {
04. ADMUX=adc_input | (ADC_VREF_TYPE &
0xff);
05. // Delay needed for the stabilization
of the ADC input voltage
06. delay_us(10);
07. // Start the AD conversion
08. ADCSRA|=0x40;
09. // Wait for the AD conversion to
complete
10. while ((ADCSRA & 0x10)==0);
11. ADCSRA|=0x10;
12. return ADCW;
13. }
Untuk menaikkan akurasi pengukuran, terutama terhadap gelombang interferensi frekuensi rendah, maka diterapkan prosedur rata-rata. Prosedur rata-rata ini akan mengambil sejumlah data hasil ukur dari percobaan, yang kemudian dicari harga rata-ratanya.
Segmen Program 4: Program berat rata-rata
01.weight=weight+read_adc(0);i++;j++; 02.if (i==10){ 03.weight_mean=(weight/10); // berat dirata-rata 04.i=0; 05.weight=0; 06.} +
Baris ke-2 dalam segmen preogram tersebut merupakan hasil pengukuran yang sebenarnya kemudian nilainya akan dimasukan pada variabel I,
yang dirata-rata sepuluh kali, dan akan
dikembalikan 0 kembali.
4. MOTOR DC
Motor DC adalah suatu mesin yang berfungsi mengubah tenaga listrik arus searah menjadi putaran dari rotor. Putaran dari rotor ini di timbulkan dari adanya arus listrik yang mengalir dari kawat yang berada dalam medan magnet. Bila arus listrik mengalir dalam kawat arahnya menjauhi medan magnet yang ter-bentuk disekitar kawat,
R8 2200k + -U1 LM741 3 2 6 71 45 R7 56k R9 100k + -U 5 LM741 3 2 6 71 45 R 11 1k 1 3 2 JH2 ADC, mik rokontroller
11 + -U2 LM741 3 2 6 71 45 R 4 10K R6 10k + -U4 LM741 3 2 6 71 45 JH3 GND 11 R10 100k 1 3 2 R1 47K JH4 Supply 9V 1 2 3 4 1 2 3 4 +9V R5 56k R3 47K JH1 Load C ell 1 2 3 4 1 2 3 4 R2 10K
kawat akan bergerak yang arahnya searah dengan arah putaran jarum jam. Sebaliknya bila arus listrik yang mengalir dalam kawat yang arahnya mendekati maka medan magnet yang terbentuk disekitar kawat, maka kawat akan bergerak kearah yang berlawanan dengan arah putaran jarum jam. Dalam penelitian ini, motor dipergunakan untuk
memutar screw, cepat lambatnya produksi
tergantung dari berapa cepat motor untuk berputar, diperlukan pengendali motor untuk mengaturnya. Rangkaian driver pada gambar 8 digunakan untuk mengontrol kecepatan motor.
Gambar 8: Rangkaian Driver Motor DC Dibawah ini merupakan potongan program yang digunakan untuk mengatur ke-cepatan motor. Segmen Program 5: Program Untuk Inisialisasi Port Motor 01. on=0; 02. on=1; speed=tempspeed; 03. if (motorrun) { //flag 04. if (OCR1A>speed) OCR1A=OCR1A-1; 05. if (tempspeed>1000) tempspeed=(tempspeed%1000);
Instruksi baris ke-1 dan baris ke-2 digunakan sebagai pengkondisian motor, bila motor mendapat 0 maka kondisi motor dalam kondisi off , sedangkan motor yang mendapat 1 maka motor dalam kondisi on. Pada baris ke-3 adalah flag dengan maksud untuk melihat kondisi motor dalam kondi off atau on, jika dalam kondisi off maka tidak akan melanjutkan program dan jika dalam kondisi on maka akan meneruskan program programnya. Baris ke-4 digunakan untuk mengejar setting PWM OCR1A merupakan PWM dimana dalam keadaan 100% maka tegangan yang dipakai sebesar 15V, dan RPM penuh sebesar 1023 RPM. Dalam alat ini digunakan 1000 RPM untuk 100% kondisi PWM.
5. RANGKAIAN DOOR LOCK
Rangkaian door lock yang dipergunakan, memiliki bentuk yang sama dengan rangkaian driver motor
(memiliki fungsi yang sama, yaitu menggunakan motor untuk membuat gerakan maju-mundur). Door lock membutuhkan membalik tegangan yang digunakan untuk menaik turunkan tuas. Berikut ini
segment program yang digunakan untuk
mengendalikan door lock. Segmen program 6: door lock
01. If motorrun // flag
02. PORTD.0=0;
03. delay_ms(200);
04. PORTD.1=0;
05. j=0;
segment program 6 menjelaskan cara maju mundurnya door lock pada baris ke-1 merupakan flag, flag adalah penanda apakah motor berputar atau tidak. Baris ke-2 kondisi dimana door lock sedang menarik tuasnya, baris ke-4 merupakan kondisi dalam kondisi mendorong ke atas, jika dikasih 1, yang berarti ON.
UJI COBA ALAT
Untuk menghindari kesalahan – kesalahan yang terjadi pada peralatan elektronika, diperlukan suatu pengujian dan pengukuran pada peralatan yang direncanakan. Pengujian dilakukan dengan menguji tipa –tiap modul berjalan dengan baik, maka perlatan ini telah dianggap telah berjalan dengan yang diinginkan.
1. Pengujian rangkaian instrumentasi
Pengujian rangkaian instrumentasi amplifier
dengan Load Cell adalah untuk mengetahui penguatan tegangan sebelum dari rangkaian instrument dan sesudah dari rangkaian instrument.
Tabel 1: Pengujian rangkaian instrumentasi
Beban Load Cell (gram) Sebelum rangkaian Instrument (mV) Sesudah rangkaian Instrumentasi (V) 100 3,732 0,374 150 5,561 0,561 200 7,334 0,748 250 9.178 0,935 300 11.116 1,122
2. Pengujian kecepatan motor dan waktu
Tujuan dilakukan pengujian kecepatan motor dan waktu yang diperlukan untuk mengetahui berapa lama waktu yang diperlukan untuk memenuhi berat J H2 port m ik ro 1 2 3 1 2 3 U1 PC817 6 7 8 3 2 4 5 1 f g h c b d e a D 6 4002 D 2 1N 4148 D 13 LED K1 R ELAY 8pin 4 3 2 5 6 7 1 8 VCC D11 4002 D 12 LED D10 4002 D5 4002 D 8 4002 JH 1 12 12 R2 Q4 BDB01A 3 2 1 VCC VCC D1 LED R4 RESI STOR Q1 BUZ60 3 1 2 R6RESISTOR C1 R1 VC C D4 4002 R 3 VCC VCC D 7 4002 VCC_24V R7RESISTOR VCC Q3 BUZ60 3 1 2 D3 1N4148 R5 RESI STOR Q2 BU Z60 3 1 2 D 9 4002
yang ingin dicapai. Alat ini memiliki beban minimum dan beban maksimum yang mampung ditimbang, beban minimum sebesar 50 gram sedangkan beban maksimum sebesar 900 gram. Load cell yang digunakan mempunyai beban maksima+l 5KG hal ini diperkecil dari beban maksimal load cell karena desain mesin yang kecil tidak dapat menampung berat sampai dengan 1KG bubuk kopi.
Tabel 2: Pengujian kecepatan motor dan waktu
Beban Load Cell (gram) Kecepatan Motor (PWM) Rata-rata Waktu (Detik) 100 700 4,33 150 700 6,50 200 700 8,80 250 700 11,52 300 700 13,46
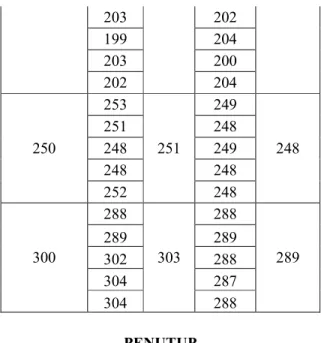
3. Pengujian berat yang diukur dengan mesin dibandingkan dengan berat yang diukur dengan timbangan standar
Tujuan dilakukan uji coba ini adalah untuk membandingkan berat yang diukur dengan mesin dan berat yang diukur dengan timbangan digital standart. Percobaan dilakukan dengan beberapa berat yang berbeda.
Tabel 5.3 Pengujian Berat dibanding referensi
Berat yang akan diukur Hasil percobaan (gram) Hasil timbangan referensi (gram) Perco -baan Nilai rata-rata Perco-baan Nilai rata-rata 100 101 102 99 99 102 98 103 100 102 101 102 100 150 148 152 152 149 149 148 151 147 152 150 151 151 200 204 204 198 201 203 202 199 204 203 200 202 204 250 253 251 249 248 251 248 248 249 248 248 252 248 300 288 303 288 289 289 289 302 288 304 287 304 288 PENUTUP
Dari hasil percobaan yang dilakukan diperoleh hasil persentase keseluruhan kesalahan alat ini mencapai 1,2 – 3 %. Ada beberapa sebab yang sudah diidentifikasi yaitu, kualitas rancangan peletakan sensor, pengaruh atau interferensi gelombang frekuensi rendah, dan kadar air dari bubuk kopi yang diukur.
Kecepatan Motor yang dipergunakan untuk door lock cukup baik untuk menggerakkan door lock,
tetapi tidak terlalu memuaskan untuk
menggerakkan screw. Terjadi trade off antara kecepatan dan kepresisian pengukuran berat.
DAFTAR PUSTAKA
1. Agus Bejo (2008), C dan AVR rahasia
kemudahan bahasa C dalam Mikrokontroller ATMega16, Graha Ilmu.
2. Erika Kress-Rogers & Christopher J. B.
Brimelow (2000), Instrumentation and sensors for the food industry Second edition, CRC Press.
3. Jacob Fraden (2003), Handbook Of Modern
Sensors: Physics, Designs, and Applications, AIP Press.
4. Allan Morris (2001), Measurement and
Instrumentation Principles, Butterworth-Heinemann.
5. Paulus Andi Nalwan (2003) “Panduan praktis
teknik antarmuka dan pemrograman mikrokontroller Atmega16”, PT. Elex Media Komputindo.
6. Sabri Solomon, (2010) Sensor Handbook,