7
LANDASAN TEORI
Robot adalah mesin yang dapat diprogram kembali dengan beberapa derajat kebebasan mandiri yang dapat bertukar informasi dengan peralatan lain. Namun definisi ini juga menyatakan secara tidak langsung bahwa komputer yang mengendalikan derajat kebebasan merupakan bagian dari sebuah robot. Jadi robot yang sebenarnya dapat diprogram kembali untuk bergerak ke segala posisi selama masih berada di dalam batasan setiap derajat kebebasan. (S. Brian Morriss, 1995, p232)
Robot ialah sebuah manipulator dengan multifungsi yang dapat diprogram ulang dan didesain untuk memindahkan material, komponen, peralatan tertentu melalui sebuah program berbasis gerakan yang dapat berubah-ubah untuk melakukan berbagai macam tugas. (Michael G. Fairhurst, 1988, p2)
Robot adalah sebuah mesin yang dapat melakukan tugas yang dikendalikan oleh manusia dan digunakan untuk melakukan tugas rutin dalam proses perakitan secara otomatis. ( www.ucs.mun.ca/~rsexty/business1000/glossary/R.htm ).
Robot adalah sebuah alat mekanik yang melakukan tugas nyata otomasi berdasarkan pada pandangan/penglihatan manusia, program yang telah didefinisikan sebelumnya atau sejumlah pedoman umum berdasarkan teknik artifisial intelegensi. Robot biasanya digunakan untuk melakukan tugas yang kotor, berbahaya, sulit, berulang-ulang atau membosankan bagi manusia. Definisi tersebut mengambil dari bentuk robot – robot dalam bidang industri yang sering digunakan dalam manufakturing (en.wikipedia.org/wiki/Robot).
2.1Computer Vision
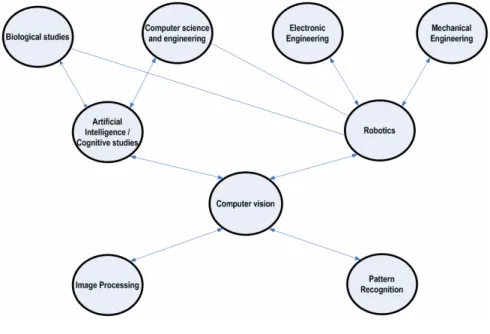
Computer Vision merupakan suatu cabang ilmu yang mempelajari bagaimana komputer dapat mengenali obyek yang diamati/diobservasi. Computer Vision adalah kombinasi dari :
Pengolahan Citra (Image Processing)
Bidang ini berhubungan dengan proses transformasi citra/gambar (image). Proses ini bertujuan untuk mendapatkan kualitas citra yang lebih baik.
Pengenalan Pola (Pattern Recognition)
Bidang ini berhubungan dengan proses identifikasi obyek pada citra atau interpretasi citra. Proses ini bertujuan untuk mengekstrak informasi/pesan yang disampaikan oleh gambar/citra.
Computer vision itu sendiri adalah sebuah bagian dari kecerdasan buatan dan pengolahan citra yang dihubungkan oleh komputer untuk melakukan pemrosesan citra digital yang berasal dari lingkungan sekitarnya. Computer vision pada dasarnya membutuhkan kombinasi dari pengolahan citra tingkat dasar untuk memperbaiki kualitas citra (contohnya seperti : menghilangkan noise, meningkatkan kontras) dan tingkat yang lebih lanjut berupa pengenalan pola serta interpretasi citra untuk mendapatkan informasi yang terdapat di dalam gambar yang berhasil ditangkap oleh sebuah sensor visual.
Computer vision adalah aplikasi lain yang berhubungan dengan AI, merupakan alat analisis dan evaluasi informasi visual dengan menggunakan komputer. Teknik AI memungkinkan komputer untuk bisa menguji sebuah gambar atau adegan nyata dengan mengidentifikasi obyek, cirinya atau polanya.
Gambar 2.1 Cabang ilmu computer vision
Komponen – komponen dasar dari computer Vision : 1. Visual sensor yang berasal dari camera
CCD CMOS
2. Image yang akan diolah Citra Analog
Citra Digital / Biner
3. Tahapan - tahapan pengolahan citra dan pengenalan pola Low Level Vision
o Sensing o Preprocessing
Medium Level vision
o Segmentasi o Deskripsi o Rekognisi
High Level Vision
o Interpretasi
2.1.1 Matriks
Matriks adalah cara yang sederhana untuk mengatasi sebuah permasalahan kombinasi linier. Sebuah matriks terdiri dari kolom dan juga baris, menurut James M. Gere (1987, hal 13) bentuk matriks yang paling umum adalah susunan bilangan-bilangan yang berbentuk persegi panjang yang dapat digambarkan sebagai berikut :
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = mn m m n n A A A A A A A A A Amxn Amn ... ... ... ... ... ... ... 2 1 2 22 21 1 12 11
(m*n) adalah orde atau ukuran dari matriks tersebut, dimana m menyatakan jumlah baris dan n menyatakan jumlah kolom matriks. Operasi yang terdapat pada matriks adalah :
1. Penjumlahan dan pengurangan matriks
2. Perkalian matriks (syarat perkalian antar matriks hanya dapat dilakukan jika kolom matriks pertama sama dengan jumlah baris matriks kedua)
3. Inverse dan Tranpose (operasi tranpose mengubah baris suatu matriks menjadi kolom dan kolom matriks menjadi baris)
4. Determinan
Notasi di dalam sebuah matrik digunakan pada proyeksi geometris untuk memanipulasi operasi yang ada pada grafik di komputer. Tiga bentuk operasi dalam matriks (James M.Gere 1987, hal 175) :
1. Penskalaan (scaling) ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 ' ' z y x r r r z y x
, r adalah factor penskalaan
2. Translasi ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 0 0 0 1 0 0 0 1 0 0 0 1 1 ' ' z y x w v u z y x
3. Rotasi ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 0 0 0 0 cos sin 0 0 sin cos 0 0 0 0 1 1 ' ' z y x z y x β β β β
, β merupakan sudut rotasi
Citra adalah representasi informasi dua dimensi yang diciptakan atau dibuat dengan melihat atau lebih tepatnya merasakan sebuah gambar atau pemandangan (http://ilmukomputer.internux.net.id/berseri/tharomrobot/index.php).
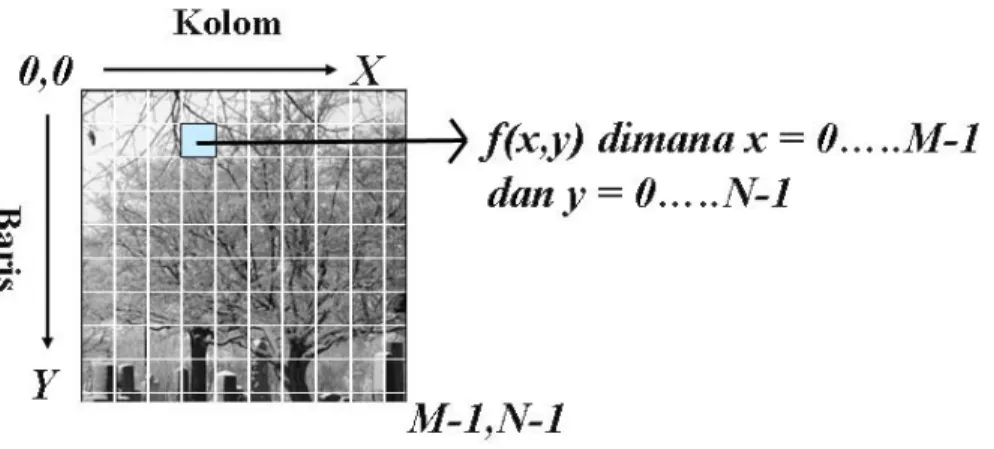
Citra adalah gambar dua dimensi yang dihasilkan dari gambar analog dua dimensi yang kontinyu menjadi gambar diskrit melalui proses sampling. Gambar analog dibagi menjadi N baris dan M kolom sehingga menjadi gambar diskrit. Persilangan antara baris dan kolom tertentu disebut dengan piksel. Contohnya adalah gambar/titik diskrit pada baris n dan kolom m disebut dengan piksel [n,m] (http://id.wikipedia.org/wiki/Pengolahan_Citra).
Citra digital dapat didefinisikan sebagai fungsi dua variabel, f(x,y), dimana x dan y adalah koordinat spasial dan nilai f(x,y) adalah intensitas citra pada koordinat tersebut. Pada citra digital berdasarkan pada penelitian bahwa sebuah warna merupakan kombinasi dari tiga warna dasar, yaitu merah, hijau, dan biru (Red, Green, Blue - RGB) (http://fajri.freebsd.or.id/tugas_akhir/bab2.pdf).
Citra adalah fungsi 2 dimensi dari intensitas cahaya. Intensitas disebut juga sebagai brightness (tingkat kecerahan) atau grey level (tingkat keabuan). Fungsi citra f(x,y) ditentukan oleh 2 komponen yaitu iluminasi dan refleksi sehingga
dimana i(x,y) adalah iluminasi yang datang dari sumber cahaya dan r(x,y) adalah koefisien refleksi/transmisi obyek.
Gambar 2.3 Koordinat spasial
Umumnya ukuran citra adalah M = N = 2k dimana k adalah bilangan integer. Jumlah bit per piksel (bpp) umumnya adalah 1, 8, 12 dan 24 (3 bytes). 1 bpp menghasilkan citra biner sedangkan 8 bpp menghasilkan citra dengan variasi intensitas (brightness) antara 0 dan 255. Citra berwarna (color images) terdiri dari 24 bpp dengan 8 bpp untuk masing-masing komponen warna R, G dan B. Untuk ukuran citra 128 x 128 dengan 8 bpp diperlukan 16384 bytes atau 16 K memori penyimpan.
Image adalah semua jenis file yang disusun dari piksel. Image atau citra merupakan representasi visual dari suatu bentuk. Citra dapat disimpan dalam berbagai format. Dua tipe citra yang fundamental adalah vektor yang disimpan sebagai rangkaian intruksi-intruksi gambar dan bitmap yang disimpan sebagai elemen-elemen gambar mosaik.
Image yang ditangkap oleh sensor kamera dapat berupa objek dalam 2D maupun 3D. Ini merupakan ilustrasi bagaimana cara konversi objek 3D ke dalam bentuk 2D.
Gambar 2.5 Ilustrasi konversi objek 3D ke dalam bentuk 2D
Wh = bentuk koordinat homogenous 3D
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ = k kZ kY kX Wh
P = matriks transformasi perspektif
⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − = 1 λ 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 P
⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ + = ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ × ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − = × = k λ kZ kZ kY kX k kZ kY kX 1 λ 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 W P Ch h ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − − = ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − − − = ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = Z λ λY Z λ λX Z λ λZ Z λ λY Z λ λX z y x C 2.1.2 Sampling
Sampling adalah proses pemetaan fungsi kontinyu ke fungsi diskrit (spatial digitization). Sampling merupakan proses untuk menentukan warna pada piksel tertentu pada citra dari sebuah gambar yang kontinyu. Pada proses sampling biasanya dicari warna rata-rata dari gambar analog yang kemudian dibulatkan kedalam angka bulat (integer). Proses sampling sering juga disebut proses digitisasi. Proses sampling menghasilkan fs(x,y) = f (x,y) . s(x,y) dimana s(x,y) = 1 untuk setiap harga x dan y
2.1.3 Kuantisasi
Kuantisasi adalah proses pemetaan variabel kontinyu ke variabel diskrit (amplitude digitization). Ada kalanya dalam proses sampling, warna rata-rata yang didapat direlasikan ke level warna tertentu. Contohnya apabila dalam citra hanya
terdapat 16 level warna abu-abu, maka nilai rata-rata yang didapat dalam proses sampling harus diasosiasikan ke 16 level tersebut. Proses mengasosiasikan warna rata-rata dengan level warna tertentu disebut dengan kuantisasi warna grayscale.
2.1.4 Noise
Noise( derau ) terjadi karena adanya fluktuasi secara acak (stochastic) pada nilai intensitas citra. Kualitas citra ditentukan oleh ratio (perbandingan) antara sinyal dan noise (www.ph.tn.tudelft.nl/Courses/FIP/noframes/fip-SNR.html) yaitu :
Capacity-limited photon noise - SNR =10log10(C) dB
2.1.5 Grayscale
Citra grayscale adalah suatu citra yang memiliki warna tingkat keabuan dan nilai dari tiap pikselnya adalah tunggal.Warna abu-abu pada citra grayscale adalah warna R (Red), G (Green), dan B (Blue) yang memiliki intensitas yang sama. Sehingga citra grayscale merupakan gambaran dari pengukuran intensitas cahaya dimana intensitas dari citra grayscale disimpan dalam 8 bit integer yang memberikan 256 level diantara level 0 sampai dengan level 255 (0 ≤ (R = G = B) ≤ 255), nilai diantaranya adalah derajat keabuan dari level 1 sampai dengan 254 (http://www.answers.com/topic/grayscale).
2.1.6 Histogram
Histogram merupakan gambaran grafik dari sebaran data yang ada memperlihatkan perbedaan antara data-data yang ada. Dalam pengolahan citra histogram dapat didefinisikan sebagai pemetaan yang menggambarkan distribusi intensitas piksel dari sebuah citra. Pada citra grayscale mempunyai level piksel dai 0 sampai dengan 255. Contohnya dapat dilihat pada gambar 2.7 (a) dan (b).
Gambar 2.7 Histogram (a) citra terang dan (b) citra gelap
2.2Sensor
Sensor dalam computer vision banyak sekali jenisnya, antara lain : photodetector, linear array, laser triangulation, laser optical time domain reflectometry, optical fiber, camera, dll. Kamera adalah sebuah peralatan untuk mengambil foto, kamera juga dapat berarti sebagai sebuah peralatan televisi yang terdiri dari sebuah sistem lensa yang memfokuskan gambar ke mosaik yang sangat peka terhadap cahaya yang di scan dengan tembakan elektron (http://www.hyperdictionary.com.dictionary/camera).
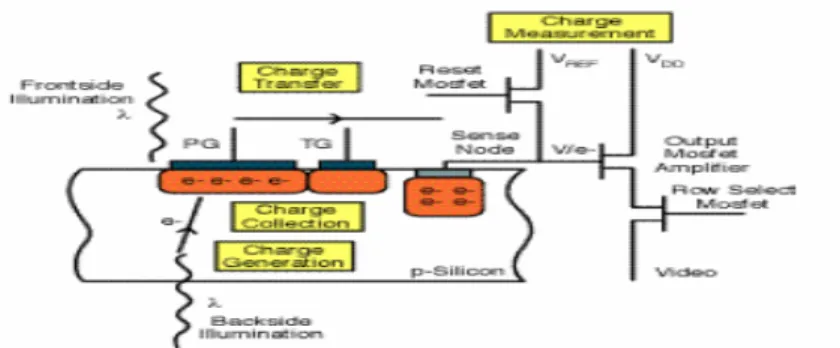
2.2.1 CCD (Charge Coupled Devices)
CCD merupakan rangkaian terintegrasi yang terdiri dari kumpulan kapasitor yang saling terhubung untuk digunakan sebagai delay line. CCD menangkap cahaya menggunakan permukaan yang peka terhadap cahaya, karena itulah diberi nama sesuai dengan cara sensor tersebut menampilkan dan menyimpan data dari citra dengan setiap baris piksel dari citra dikonversi ke dalam sinyal listrik dengan intensitas warna yang berhubungan dengan spektrum warna dari citra. Setiap cahaya yang jatuh ke satu baris permukaan sensor akan dipindahkan ke dalam readout register. Dari sana, kemudian sinyal dilewatkan ke sebuah amplifier dan menuju ke analog-to-digital converter. Setelah satu baris berhasil, readout register akan dihapus agar dapat ditempati oleh baris yang berikutnya sehingga semua baris berhasil ditangkap oleh CCD. Sinyal-sinyal elektrik dalam tiap baris sekarang telah dirangkai pada readout register, ketika baris yang satu menempati readout register maka baris yang lain akan menempati tempat yang telah ditinggalkan sebelumnya karena hanya satu baris yang dapat ditangkap.
Secara teknis sangat mudah namun sangatlah tidak ekonomis untuk menggabungkan berbagai macam fungsi lain dari kamera, seperti : clock driver, timing logic dan signal processing ke dalam satu chip pada CCD. Umumnya diletakan pada chip yang terpisah.
2.2.2 CMOS (Complementary Metal Oxide Semiconductor)
Sensor citra digital CMOS mempunyai fungsi yang lebih banyak pada chip tunggal dibandingkan dengan CCD. Sebagai tambahan, untuk mengkonversi foton menjadi elektron dan mengirimkan elektron maka sensor CMOS juga melakukan image processing, edge detection, noise reduction dan analog to digital converter. Sensor CMOS juga mengurangi jumlah komponen eksternal yang terhubung kepadanya. Dengan menggunakan sensor CMOS yang terintegrasi pada kamera digital, maka chip ini membuat ruang pada kamera digital menjadi semakin luas karena tidak diperlukan chip lainnya seperti : digital signal processor dan analog to digital converter.
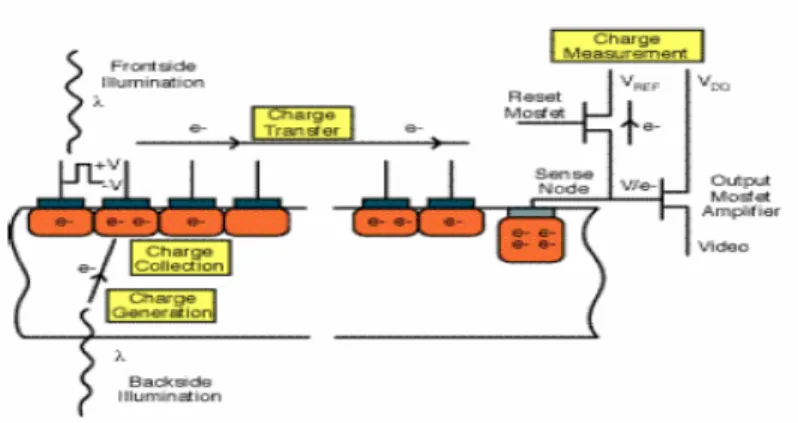
Pada sensor citra CMOS terdapat active pixel sensor (APS) yang menambahkan transistor penguat readout kepada tiap piksel, tujuannya adalah agar perubahan muatan menjadi tegangan dilakukan pada piksel. Selain itu APS ini juga dapat digunakan untuk random access kepada sensor yang ada pada tiap piksel, sama dengan memory access pada teknologi RAM.
Muatan di readout dari sensor APS CMOS dengan menggunakan rangkaian paralel, yang memperbolehkan sinyal dari piksel tunggal atau dari kumpulan piksel dialamatkan secara langsung. Kemampuan direct access random ini memperbolehkan CMOS untuk memilih kumpulan muatan piksel mana yang akan di readout terlebih dahulu. Kemampuan ini disebut dengan windowing readout. Sebuah sensor CMOS memiliki kemampuan untuk mengurangi ukuran dari citra ketika ditangkap. Selain itu sensor ini juga menawarkan potensi penigkatan kecepatan readout.
Gambar 2.9 Pembagian komponen sensor CMOS
Beberapa hal penting tentang sensor image CMOS :
• Kualitas image CMOS yang dihasilkan mendekati kualitas image untuk CCD pada level rendah sampai menengah, untuk level tinggi masih belum dapat tertandingi.
• Sensor image CMOS dapat terintegrasi dengan berbagai fitur kamera lainnya dalam satu chip sedangkan CCD harus menggunakan modul eksternal sehingga dapat menekan segi biaya produksi karena dapat diproduksi secara massal. Tidak hanya membuat kamera menjadi kecil, ringan dan murah tetapi juga membutuhkan sedikit daya sehingga batere bertahan lebih lama.
• Walaupun sensor CMOS memiliki keistimewaan dalam menangkap gambar pada lingkungan terbuka namun memiliki kelemahan pada kondisi pencahayaan yang kurang. Sensitifitas sensor ini terhadap cahaya berkurang karena bagian dari permukaannya diberikan rangkaian tambahan yang dapat menyaring / memfilter noise dan untuk fungsi lain. Nilai persentasi dari suatu piksel yang mampu menangkap cahaya dinyatakan dalam fill factor.
• Sensor CMOS memiliki noise level yang lebih tinggi dibandingkan dengan CCD sehingga waktu proses antar gambar lebih cepat dibandingkan apabila
sensor ini menggunakan digital signal processing (DSP) untuk mengurangi atau menghilangkan noise.
(http://www.shortcourses.com/how/sensors/sensors.htm)
Bagan perbandingan antara sensor CCD dan CMOS secara sederhana, ditunjukkan pada gambar 2.10.
Gambar 2.10 Perbandingan CCD dan CMOS
Berikut ini adalah perbandingan antara CCD dengan CMOS dilihat dari segi kemampuan dan fungsi dapat dilihat pada tabel 2.1 :
Tabel 2.1 Perbandingan kemampuan antara CCD dengan CMOS
Fitur CCD CMOS
Sinyal keluar dari piksel
Paket elektron Tegangan Sinyal keluar dari
chip
Tegangan (analog) Bit (digital) Sinyal keluar dari
kamera
Bit (digital) Bit (digital
Faktor pengisi Tinggi Menengah
Perbandingan penguat
- Menengah
Sistem noise Rendah Menengah ke tinggi
Kompleksitas sistem Tinggi Rendah
Kompleksitas sensor Rendah Tinggi
Komponen kamera PCB, lensa, kumpulan
chip Chip, lensa
Biaya Tergantung pada
2.3 Robot
2.3.1 Klasifikasi umum dari robot
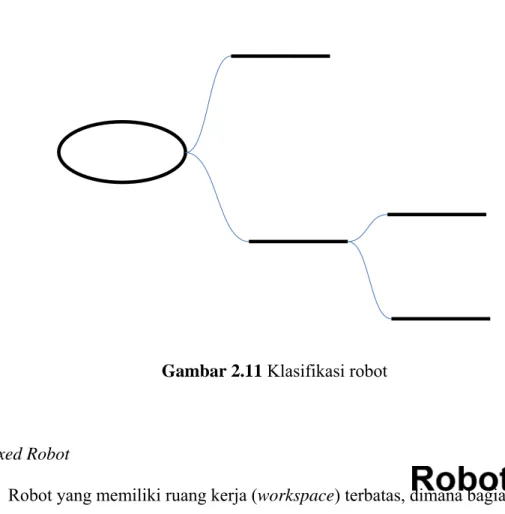
Gambar 2.11 Klasifikasi robot
Fixed Robot
Robot yang memiliki ruang kerja (workspace) terbatas, dimana bagian dasarnya (platform) dilekatkan pada panel.
Mobile Robot
Robot yang memiliki ruang gerak yang berpindah-pindah dari suatu tempat ke tempat lain. Mobile Robot dikelompokkan menjadi dua jenis yaitu :
• Wheeled Robot, adalah robot yang dapat bergerak menggunakan perputaran roda. • Legged Robot, adalah robot yang dapat bergerak menggunakan pergerakan kaki.
2.3.2 Komunikasi Serial
Serial port merupakan hal penting dalam mikrokontroller, karena dapat dengan mudah menghubungkan mikrokontroller dengan komputer atau perangkat lainnya. Pin yang digunakan pada mikrokontroller yaitu transmit data (TXD) dan receive data (RXD). Mikroprosesor dalam komputer bekerja atas dasar prinsip data paralel, mula-mula banyak dipakai mikroprosesor dengan data paralel 8 bit dan kini sudah dipakai data paralel 32 bit. Dalam hal komunikasi data digunakan teknik pengiriman data secara seri, karena saluran komunikasi data paralel yang panjang harganya sangat mahal dan tidak praktis walaupun kecepatan teknik komunikasi data secara paralel lebih cepat. Hal ini disebabkan komunikasi data secara paralel menggunakan jalur data lebih banyak daripada komunikasi data secara serial.
Kecepatan transfer data dinyatakan dalam satuan baud atau bps (bit per detik). Baud rate yang biasanya digunakan adalah sebesar 1.200, 2.400, 4.800, 9.600, 19.200 dan 57.600 bps. Kecepatan transmisi yang paling baik digunakan adalah 9600 bps (Douglas, 1991, p488).
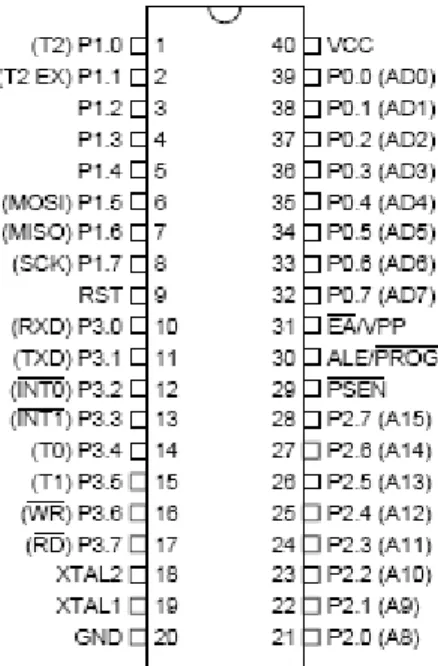
2.3.3 Mikrokontroller
Mikrokontroller AT89S52 adalah mikrokomputer 8 bit yang memiliki daya kerja rendah dan unjuk kerja yang tinggi. Mikrokontroller AT89S52 memiliki 8k byte yang dapat diprogram dan memiliki ROM (Read Only Memory) yang dapat dihapus. 8k byte flash tersebut dinamakan EPROM (Erasable and Programmable ROM). AT89S52 ini diproduksi dengan menggunakan teknologi nonvolatile dari ATMEL dan kompatibel dengan standar industri 8051 dalam hal set instruksi dan pin keluaran.
On Chip Flash memperbolehkan memori program untuk di program kembali dalam sistem atau dengan menggunakan pemrograman memori nonvolatile konvensional. Dengan menghubungkan CPU 8 bit dan flash dalam sebuah chip monolitik, AT89S52 menjadi sebuah mikrokomputer yang menyediakan solusi fleksibel dan hemat biaya untuk aplikasi-aplikasi kontrol.
Gambar 2.12 Mikrokontroler AT89S52
2.3.4 Motor Servo
Motor merupakan alat mekanik yang mengubah energi listrik menjadi putaran mekanik. Motor servo adalah motor DC yang didalamnya terdapat gear, umpan balik, pengontrol untuk menggerakan motor, dan sensor posisi yang umumnya ialah potensiometer. Motor servo merupakan motor yang paling sering dipakai dalam robotik karena ukuran, efisiensi dan kekuatannya.
Kecepatan motor servo lebih cepat dibandingkan dengan motor stepper. Tanpa penggunaan sistem kendali, motor servo mempunyai ketepatan yang sangat kecil dimana
hal ini adalah kelemahannya. Motor servo menggunakan sistem umpan balik yang pengulangan tertutup. Sistem servo lebih mahal dibanding melangkah sistem motor dalam kaitan dengan kebutuhan akan suatu pengontrol. Motor servo mencapai penempatan yang diinginkan mereka lebih cepat dari motor stepper.
Motor servo umumnya hanya bisa berputar sebesar 180° dan beberapa bisa berputar sebesar 210°, servo terdiri dari 3 buah pin, yaitu pin power (biasanya antara 4.8 - 6 V), pin ground dan pin kontrol. Servo akan berputar ke suatu sudut tergantung pada sinyal yang diberikan pada pin kontrolnya. Sinyal yang diberikan ke pin kontrolnya ialah berupa sinyal pulsa antara 1 - 2 ms, misalkan diberikan sinyal pulsa 1 ms, maka servo akan berputar ke sudut 0°, selama pin kontrolnya mendapat sinyal 1 ms tersebut, servo akan mempertahankan posisinya supaya tepat di 0°, servo mengharapkan untuk melihat sinyal pada pin kontrolnya lebih kurang setiap 20 ms atau sekitar 50 Hz, bila diberi sinyal pulse 1.5 ms, maka servo akan berputar ke sudut 90° dan bila diberi sinyal pulsa 2 ms, maka servo akan berputar ke sudut 180°. Servo bersifat proposional, kecepatan dan torsi motor yang dihasilkan proposional dengan voltase yang diberikan pada pin powernya, semakin besar voltase yang diberikan, maka semakin cepat dan semakin besar juga torsi yang dihasilkan, begitu juga sebaliknya.