Identifikasi Model Nonlinier Hammerstein Dengan Metode
Hibrid Kombinasi Algoritma Genetika dan Least-Squares
Pada Sistem Tangki Terhubung
Aries Subiantoro
*), Feri Yusivar, Bagio Budiardjo, Muhammad Idrus Al-Hamid
*)
Real Time Measurement and Control Research Group
Departemen Elektro Fakultas Teknik Universitas Indonesia, Kampus Baru UI Depok, 16424 Email: [email protected]
Abstrak- Makalah ini membahas identifikasi model Hammerstein pada sistem tangki terhubung. Struktur jaringan radial basis function digunakan untuk merepresentasikan bagian nonlinier statis model Hammerstein. Jumlah node, parameter pusat, dan variansi fungsi Gaussian dioptimasi dengan menggunakan algoritma genetika. Bagian dinamis model Hammerstein diwakili oleh model autoregressive exogenous (ARX), dimana nilai parameter model ARX diestimasi dengan menggunakan algoritma least squares. Struktur model dinamis ARX ditentukan berdasarkan a priori knowledge. Indikator kesesuaian terbaik antara model dengan sistem tangki terhubung ditentukan oleh parameter Akaike information criterion (AIC). Dari hasil uji eksperimen menunjukkan bahwa model Hammerstein yang diperoleh dapat mewakili karakteristik nonlinier sistem tangki terhubung dengan baik.
Kata kunci: Identifikasi sistem, model Hammerstein, algoritma genetika, least squares
1. Pendahuluan
Kebutuhan utama untuk mayoritas aplikasi kendali lanjut dan teknik monitoring adalah model proses yang akurat. Pengembangan model dinamik proses berdasarkan first principle yang mengacu kepada aturan fisika-kimia sangat sulit dilakukan. Hal ini disebabkan misalkan oleh reaksi kimia yang tidak diketahui, keterbatasan pengetahuan formal akan sistem, tingginya ketidakpastian, serta karakteristik sistem yang berubah terhadap waktu. Sehingga perkembangan pemodelan sistem mengarah kepada penurunan model berbasis data masukan-keluaran empiris.
Identifikasi sistem adalah proses pembentukan model dinamik sistem berdasarkan data eksperimen. Identifikasi model linier sudah berkembang lama
baik untuk sistem linear time invariant (LTI) maupun sistem linear time varying (LTV) [1]. Beberapa metode identifikasi yang dikenal dalam domain frekuensi maupun domain waktu juga sudah mapan membentuk ilmu tersendiri.
Hanya saja mayoritas proses industri memiliki karakteristik nonlinier. Model linier hanya mempunyai akurasi disekitar titik kerja dengan daerah operasi yang sempit. Oleh karena itu, penelitian di bidang identifikasi model nonlinier merupakan issu yang menarik dan saat ini sedang berkembang. Untuk teknik perancangan pengendali berbasis model nonlinier seperti metode nonlinear model predictive control (NMPC) [2], model nonlinier ini sangat membantu pengendali agar dapat beroperasi di daerah operasi yang lebar.
Struktur model nonlinier yang banyak digunakan adalah model neural network [3], fuzzy Takagi-Sugeno [4], Wiener [5], dan Hammerstein [6]. Didalam estimasi parameter model Wiener, Verhaegen mengkombinasikan bagian model linier ruang keadaan dan fungsi nonlinier parametrik [7], dan kemudian menggunakan optimasi numerik untuk mengestimasi parameter model. Wigren mengusulkan algoritma estimasi rekursif yang mengaproksimasi fungsi nonlinier dengan fungsi piecewise linear [8]. Dalam dekade terakhir penelitian identifikasi model Hammerstein justru mendapat lebih banyak perhatian dibandingkan model Wiener [9].
Didalam makalah ini dibahas identifikasi model Hammerstein pada sistem tangki terhubung yang memiliki karakteristik nonlinier. Bagian nonlinier statis diwakilkan oleh model radial basis function (RBF) dan bagian linier dinamis diwakili oleh model autoregressive exogenous (ARX). Identifikasi model Hammerstein dilakukan dengan menggunakan algoritma hibrid, yaitu kombinasi antara algoritma genetika dan algoritma least squares. Struktur fungsi nonlinier statis dioptimasi dengan menggunakan
algoritma genetika, dan nilai parameter model bagian linier dinamis distimasi oleh algoritma least squares. Pada tahapan validasi, model sistem tangki terhubung terbaik dipilih berdasarkan nilai parameter indikator Akaike information criterion (AIC) dengan menggunakan data yang berbeda dari data yang digunakan dalam tahapan estimasi parameter model.
2. Identifikasi Sistem Tangki Terhubung
Struktur Model
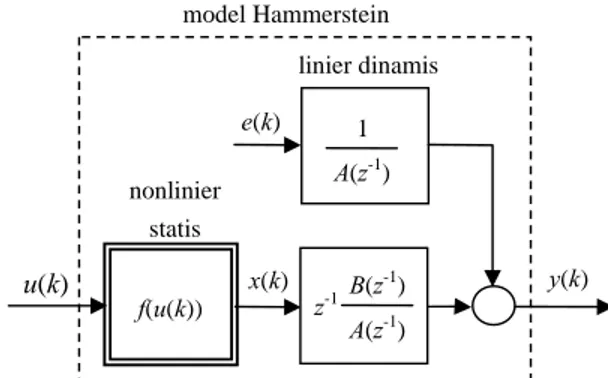
Model Hammerstein seperti terlihat pada gambar 1 terdiri dari bagian nonlinear statis dan bagian linear dinamis. Bagian nonlinear statis dalam makalah ini menggunakan jaringan radial basis function (RBF). Jaringan ini terdiri dari lapisan masukan dan keluaran disertai dengan dengan sebuah lapisan tersembunyi yang mempunyai beberapa unit fungsi aktivasi berupa fungsi Gaussian berbentuk bell.
Gambar 1. Diagram blok model Hammerstein Konfigurasi jaringan RBF seperti terlihat pada gambar 2 mempunyai bentuk persamaan
(
)
(
( ))
( ) ) ( ) ( 1 k k u w k u f k x M i i iφ +ε = =∑
= (1)dengan fungsi Gaussian yang digunakan memiliki bentuk persamaan seperti berikut
(
)
{
(
2 2)
}
/ ) ( exp ) ( i i i u k = − uk −c d φ (2)dengan M adalah jumlah node pada lapisan tersembunyi, ci dan di masing-masing adalah pusat
dan lebar dari fungsi Gaussian, wi adalah parameter
bobot node ke-i terhadap lapisan keluaran, serta ε(k) adalah kesalahan pendekatan.
Gambar 2. Struktur jaringan RBF untuk bagian nonlinier statis
Sementara itu untuk bagian linier dinamis digunakan struktur model autoregressive exogenous (ARX) ) ( ) ( 1 ) 1 ( ) ( ) ( ) ( 1 1 1 k e z A k x z A z B k y − − − + − = (3)
Identifikasi Model Linier Dinamis
Dengan memanfaatkan a priori knowledge yang dimiliki pada sistem tangki terhubung, bahwa sistem ini mempunyai fungsi alih orde dua, maka polinom A(z-1) dan B(z-1) mempunyai bentuk persamaan:
2 2 1 1 1 1 ) (z− = +a z− +a z− A (4) 1 1 0 1 ) (z− =b +bz− B (5)
Dengan mensubstitusi persamaan (1) kedalam persamaan (3) diperoleh bentuk persamaan
(
( ))
( ) ) ( ) ( ) ( 1 1 1 y k wB z u k v k z A i M i i + = − = −∑
φ (6)Persamaan (6) dapat ditulis kembali dalam bentuk vektor: ) ( ) ( ) (k k vk y =ϕT θ + (7) dengan v(k) = e(k) + B(z-1)ε(k-1) adalah kesalahan persamaan, dan
[
T]
T w T w T w T a θ θ θ M θ , , , L 2 1 = θ (8)[
]
T a = a1, a2 θ (9) z-1 B(z -1) A(z-1) f(u(k)) x(k) nonlinier statis linier dinamis u(k) A(z-1) 1 e(k) model Hammerstein y(k)[
]
[
]
T i i T w w w w b w b i i i 1 0 , ) 2 ( ), 1 ( = = θ θ θ (10)[
T]
T w T w T w T a k k k k k) ( ), ( ), ( ), M( ) ( =ϕ ϕ 1 ϕ 2 L ϕ ϕ (11)[
]
T a(k)= −y(k−1), −y(k−2) ϕ (12)(
)
(
)
[
]
T i i wi(k)= φ u(k−1), φ u(k−2) ϕ (13)Karena paramater yang tidak diketahui yang berada dalam vektor θ mempunyai hubungan linier antar parameter, maka nilai parameter tersebut dapat diestimasi dengan menggunakan metode least squares dalam bentuk formula sederhana
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ =
∑
∑
= − = N k N k T k k k k 1 1 1 ) ( ) ( ) ( ) ( ˆ ϕ ϕ ϕ y θ (14)dengan N adalah jumlah data pasangan masukan- keluaran. Dari hasil estimasi nilai parameter θ, bagian linier dinamis dapat ditentukan dengan persamaan
[
ˆ, ˆ , ˆ, ˆ]
[
:]
θˆ 4 4 1 0 2 1 a b b I x 0 a = (15)serta memberikan ŵ1=1 tanpa menghilangkan
generalitas. Kemudian, parameter dari bagian nonlinier statis dapat diperoleh dengan menggunakan metode least squares lagi:
(
i M)
j j j w j w w j w i i , , 3 , 2 ) ( ˆ ) ( ˆ ) ( ˆ ˆ 2 1 2 2 1 1 1 L = =∑
∑
= = θ θ θ (16)Fungsi nonlinier statis dapat dituliskan seperti pada persamaan sebagai:
(
)
∑
(
)
= = M i i i u k w k u f 1 ) ( ˆ ) ( ˆ φ (17)Identifikasi Model Nonlinier Statis
Untuk mendapatkan struktur nonlinier statis model Hammerstein terbaik digunakan algoritma genetika untuk meminimumkan perbedaan antara keluaran sistem dengan model berdasarkan indikator kinerja Akaike information criterion (AIC). Parameter model linier dinamis dan nonlinier statis ditentukan oleh algoritma least-squares.
Tahap 1: Pembuatan populasi awal
Seperti terlihat pada gambar3, sistem pengkodean yang akan digunakan adalah sistem biner. Dengan demikian akan dibentuk kromosom yang terdiri dari bit-bit 1 dan 0 sejumlah Q, dimana Q adalah jumlah kromosom dan individu dalam populasi. Jumlah node ditentukan oleh Mmax bit pertama, dimana Mmax
adalah jumlah node maksimal yang akan dikeluarkan sebagai hasil dari algoritma genetika. Banyaknya jumlah 1 pada Mmax bit pertama
menunjukkan jumlah node pada individu tersebut. Nilai pusat dan lebar dari tiap node ditentukan oleh bit-bit berikutnya yang dikelompokkan dalam blok-blok. Mmax blok pertama setelah Mmax bit
pertama menunjukkan nilai pusat pada tiap node. Sementara nilai lebar tiap node ditentukan oleh blok-blok berikutnya yang jumlahnya juga sebanyak Mmax
blok.
Panjang tiap blok tergantung pada banyaknya bit yang ditentukan untuk blok pusat dan blok lebar. Makin banyak jumlah bit pada suatu blok, akan semakin teliti pula hasil yang dikeluarkan oleh algoritma genetika. Jumlah bit pada blok pusat dan blok lebar tidak harus sama, tetapi jumlah bit pada tiap blok pusat maupun tiap blok lebar harus sama.
Nilai maksimal node yang digunakan dalam permodelan ini adalah 10 node. Oleh karena itu, jumlah bit pada blok pertama yang menentukan jumlah node yang akan digunakan adalah 10 bit. Blok pusat dan blok lebar keduanya diberikan panjang 15 bit. Jumlah populasi awal yang dibentuk adalah 30.
Gambar 3. Skema pengkodean kromosom Tahap 2: Pendekodean kromosom
Blok pusat dan blok lebar yang didekodekan adalah blok pusat dan blok lebar yang bersesuaian dengan node yang diaktifkan, yakni bit-bit pada Mmax bit pertama yang bernilai 1. Bila node yang
diaktifkan adalah node ke-2, 5, dan 7, maka blok pusat dan lebar yang didekodekan adalah blok pusat dan blok lebar yang ke-2, 5, dan 7 pula.
mengubah nilai biner dalam suatu blok menjadi nilai desimal dengan rentang 0 sampai 1. Kemudian nilai tiap blok dapat ditentukan dengan menggunakan rumus berikut untuk blok pusat:
min min max 1 21 C c c c ci L + − − = (18)
dan rumus berikut untuk blok lebar:
min min max 1 2 2 D d d d di L − + − = (19)
dimana ci dan di masing-masing adalah letak pusat
dan lebar node ke-i, L1 dan L2 adalah jumlah bit
yang digunakan pada blok pusat dan lebar, cmax dan
cmin adalah nilai maksimum dan minimum pusat,
dmax dan dmin adalah nilai maksimum dan minimum
lebar, serta C dan D adalah nilai desimal dari blok pusat dan lebar yang nilainya berkisar antara 0 sampai 1.
Tahap 3: Estimasi Parameter
Q buah individu hasil pendekodean kemudian digunakan untuk membuat Q buah RBF Network dengan jumlah node dan parameter fungsi Gaussian sesuai nilai yang terdapat pada masing-masing individu. Dari tiap RBF Network yang telah dibentuk, dicari nilai θˆ dan i fˆi
(
u(k))
denganmenggunakan persamaan (14) sampai (17). Tahap 4: Perhitungan nilai kesesuaian
Perhitungan nilai kesesuaian dilakukan dengan menggunakan Akaike information criterion (AIC) dengan rumus
(
)
i N k i i y k y k P N N AIC log 1 ( ) ˆ ( ) 2 1 2 + ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − =∑
= (20) untuk i=1,2,..., Q, dan ) 1 ( + + =n M r Pi i (21)adalah jumlah parameter model identifikasi pada persamaan (7), n dan r masing-masing adalah orde pada persamaan (4) dan (5), M adalah jumlah node pada jaringan RBF ke-i, N adalah jumlah data masukan-keluaran, dan ŷi(k) adalah keluaran dari
model estimasi.
Setelah nilai AIC ditentukan, nilai kesesuaian
dapat dihitung dengan menggunakan persamaan Fi =
-AIC. Nilai kesesuaian yang diperoleh kemudian dilinierkan berdasarkan nilai kesesuaian terbesar dan terkecil pada suatu generasi. Hal ini dilakukan untuk mencegah konvergensi prematur sehingga keluaran dari algoritma genetika tidak terjebak pada minima lokal.
Tahap 5: Pindah silang
Pemilihan kromosom orang tua yang akan melakukan pindah silang dilakukan dengan menggunakan metode roulette wheel. Pindah silang dilakukan pada kromosom orang tua dengan menggunakan satu buah titik potong yang letaknya ditentukan secara acak. Dari dua buah kromosom orang tua akan dihasilkan dua buah kromosom anak yang masing-masing terdiri dari bagian yang berlainan dari kedua kromosom orang tua yang telah dipotong.
Tahap 6: Mutasi
Pada sistem pengkodean biner, mutasi dilakukan dengan mengubah nilai 0 menjadi 1 atau nilai 1 menjadi 0. Mutasi dilakukan pada kromosom-kromosom anak hasil pindah silang yang akan menjadi populasi pada generasi berikutnya. Suatu bit pada suatu kromosom individu akan terkena mutasi dengan nilai probabilitas kecil. Kromosom individu dengan nilai kesesuaian tertinggi yang telah disimpan pada proses elitisme tidak dikenai proses mutasi.
3. Hasil Uji Eksperimen dan Analisa
Deskripsi Sistem Tangki Terhubung
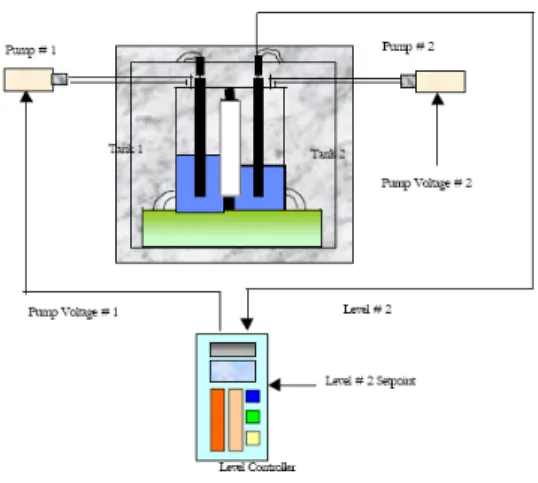
Spesifikasi sistem tangki terhubung yang digunakan dalam makalah ini mengacu pada keadaan fisik sistem coupled tank apparatus PP-100, dengan skema sistem tangki terhubung terlihat pada gambar 4.Sistem ini terdiri dari dua tangki tipe menara yang dipasang diatas sebuah reservoir yang berfungsi sebagai tempat penyimpanan air. Tiap tangki memiliki pompa, keluaran air ke reservoir, dan sensor ketinggian air.
Pompa untuk tiap tangki diatur oleh sirkuit
Pulse-Width Modulation (PWM) menggunakan
peralatan MOSFET. Sinyal input untuk tiap pompa dapat berupa sinyal PWM ataupun tegangan DC dengan kisaran 0 sampai +5 volt.
digunakan sensor tipe kapasitif. Sensor ini memberikan keluaran berupa tegangan DC dengan kisaran 0 sampai +5 volt. Keluaran 0 volt diberikan pada posisi ketinggian air terendah dengan ketinggian sekitar 20mm. Keluaran 5 volt diberikan pada posisi ketinggian air tertinggi tepat sebelum selang keluaran yang menjaga air tidak luber dari atas tangki.
Sebagai masukan dan keluaran pada sistem tangki terhubung adalah catu tegangan pompa u(t) yang mengirim debit fluida qin(t) kedalam tangki
pertama dan ketinggian permukaan fluida h2(t) pada
tangki kedua. Rentang tegangan catu pompa dan ketinggian fluida berturut-turut adalah berkisar diantara 0 volt hingga 5 volt dan 0 cm hingga 30 cm. Sekat diantara kedua tangki diangkat sedikit untuk memberikan keterhubungan antara kedua tangki. Tinggi dari pengangkatan sekat ini tidak diubah-ubah selama pembuatan model. Pada konfigurasi ini pompa pada tangki kedua tidak digunakan.
Gambar 4. Skema sistem coupled-tank apparatus PP-100
Pengambilan Data Eksperimen
Uji eksperimen dilakukan untuk membandingkan kualitas model Hammerstein yang diperoleh terhadap keluaran sistem coupled-tank apparatus PP-100. Gambar 5 memperlihatkan peralatan yang diperlukan dalam uji eksperimen untuk mengambil data keluaran berupa sinyal tegangan dari sensor level dan data masukan sistem berupa suplai tegangan pompa.
Masukan sistem berupa sinyal band-limited white noise dipilih agar keluaran sistem dapat memberikan informasi cukup untuk estimator serta rentang frekuensi yang cukup lebar. Keluaran sistem
direkam sebanyak 1000 data pencuplikan. Untuk mencegah terjadinya aliasing dan menghindari waktu pencuplikan yang terlalu kecil yang dapat menghasilkan sinyal kendali yang besar, maka waktu pencuplikan ditentukan sebesar 6 detik. Dari 1000 data hasil eksperimen, 600 data pertama digunakan untuk estimasi model Hammerstein, sedangkan sisa 400 data digunakan untuk keperluan validasi. Validasi model bertujuan untuk menguji kehandalan model jika jika sistem diberikan data masukan berbeda yang tidak digunakan dalam tahap estimasi. Untuk mendapatkan model Hammerstein terbaik, juga dengan melihat dari aspek ketersediaan a priori knowledge yang dimiliki untuk bagian linier dinamis, maka 3 model Hammerstein berbeda dengan masing-masing memiliki 3, 5, dan 7 node dievaluasi untuk mendapatkan kemiripan terbaik antara model dengan sistem.
Gambar 6 memperlihatkan data masukan-keluaran yang diperoleh dari uji eksperimen. Terlihat bahwa sinyal masukan berupa tegangan catu pompa sudah cukup mewakili keseluruhan daerah kerja sistem. Respons keluaran juga memperlihatkan variasi nilai yang tidak monoton dan tidak cenderung menuju keadaan tunak.
Gambar 5. Peralatan eksperimen identifikasi sistem tangki terhubung
Analisa Hasil Identifikasi
Hasil identifikasi model Hammerstein untuk 3 model berbeda, masing-masing dengan 3, 5, dan 7 node di bagian model RBF dan struktur model linier dinamis tetap, berturut-turut dapat dilihat pada tabel 1, 2, dan 3. Nilai parameter linier dinamis diestimasi dengan menggunakan persamaan (14). Terlihat dari ketiga tabel tersebut, model Hammerstein terbaik ditunjukkan oleh model yang menggunakan 3 node yang memiliki nilai indikator kinerja AIC terendah baik yang dihitung dengan menggunakan data estimasi maupun dengan data validasi. Nilai indikator AIC dari model terbaik yang didapat adalah -1686.9. Semakin rendah nilai AIC yang diperoleh artinya semakin bagus model tersebut dan paling cocok meniru perilaku sistem tangki terhubung. Disamping itu pula model terbaik yang diperoleh memiliki jumlah node terkecil, sehingga memberikan kemudahan dalam aspek realisasi model nonlinier, terutama dari segi waktu komputasi. Untuk keperluan lebih lanjut seperti pengendalian yang memanfaatkan model nonlinier secara eksplisit misalkan pada skema internal model control [10], implementasi model Hammerstein yang diperoleh tidak akan membebani komputasi perhitungan sinyal kendali dalam skema pengendalian.
Parameter bobot ŵi dari tiap node pada jaringan
RBF dapat ditentukan dengan menggunakan persamaan (16) dan asumsi yang telah digunakan di fasa awal, yaitu ŵ1 = 1, ŵ2 = 21.1905, dan ŵ3 =
-1.0306
Tabel 1. Nilai parameter model dengan 3 node Node-i ci di b0wi b1wi #1 2.7127 3.3532 0.06472 -0.092 #2 2.8271 9.6146 -0.5855 0.57261 #3 3.6201 4.5226 0.05812 -0.007 a1 = -0.40922 a2 = -0.58626 b0 = 0.06472 b1 = -0.091994
AIC pelatihan = -1686.9 AIC validasi = -1105.2 Tabel 2. Nilai parameter model dengan 5 node Node-i ci di b0wi b1wi #1 4.7929 3.233 -3.7714 4.1757 #2 2.4771 2.6631 -1.0812 1.2692 #3 0.2907 9.9014 -4.1116 3.9909 #4 4.3809 4.8925 19.81 -21.605 #5 4.743 6.3622 -19.084 20.489 a1 = -0.4056 a2 = -0.58979 b0 = -3.7714 b1= 4.1757
AIC pelatihan = -1680.4 AIC validasi =-1097.4
Tabel 3. Nilai parameter model dengan 7 node Node-i ci di b0wi b1wi #1 2.4384 8.5568 464.8 -415.36 #2 4.8636 8.219 805.12 -770.19 #3 4.178 2.9289 -3.5935 2.377 #4 4.2392 9.4385 -1313.9 1243 #5 0.6929 5.7244 -42.101 30.645 #6 3.7695 3.34 -51.534 46.704 #7 3.6142 2.7889 22.371 -19.656 3.6201 4.5226 0.05812 -0.007 a1= -0.40757 a2 = -0.58784 b0= 464.8 b1 = -415.36
AIC pelatihan = -1673.5 AIC validasi =-902.57
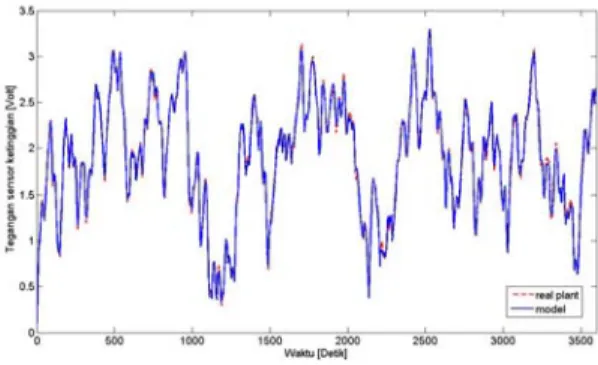
Pengujian kualitas model juga dilakukan secara kualitatif dengan membandingkan keluaran model dengan keluaran sistem tangki terhubung. Gambar 7 memperlihatkan kualitas model Hammerstein yang meniru karakteristik perubahan sinyal keluaran sistem tangki terhubung dengan baik untuk data estimasi.
Gambar 7 Kurva perbandingan keluaran sistem riil dan model pada data estimasi
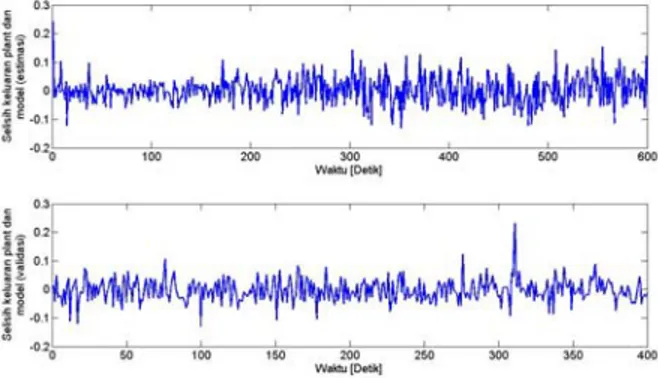
Untuk membuktikan generalitas model, bahwa model tidak hanya sesuai dengan sistem riil untuk data pelatihan saja melainkan juga untuk data yang tidak digunakan dalam perhitungan estimasi parameter model, maka model diuji dengan data validasi. Nilai AIC yang diperoleh dengan membandingkan antara keluaran model dan data validasi adalah -1105.2. Indikator kuantitatif kinerja model dengan 3 node terlihat lebih rendah dibandingkan dengan model dengan 5 dan 7 node. Secara grafis, kecocokan respons keluaran model dengan keluaran sistem tangki terhubung diperlihatkan pada gambar 8. Selisih respons keluaran model dengan sistem yang tidak terlalu signifikan pada setiap kondisi juga ditunjukkan pada gambar 8 dan 9, baik untuk data estimasi maupun data validasi.
Gambar 8. Kurva perbandingan keluaran sistem riil (putus-putus) dan model pada data validasi (solid)
Gambar 9. Kurva selisih antara keluaran sistem riil dengan model: data estimasi (atas), validasi (bawah)
4.
KesimpulanDari hasil uji eksperimen identifikasi sistem tangki terhubung dapat diambil kesimpulan, bahwa identifikasi model Hammerstein pada sistem
coupled-tank apparatus PP-100 dengan
menggunakan algoritma hibrid, yaitu kombinasi algoritma genetika dan least-squares, menunjukkan hasil yang baik. Hal tersebut ditunjukkan dengan nilai indikator kinerja AIC yang rendah, yaitu AIC=-1686.9 untuk data estimasi dan AIC=-1105.2 untuk data validasi. Secara kualitatif juga diperlihatkan kurva respons model sanggup meniru karakteristik keluaran sistem dengan baik.
Referensi
[1] L. Ljung, “System identification,” 2nd ed., Prentice-Hall, NJ, 1999.
[2] P. Mhaskar, N.H. El-Farra, and P.D. Christofides, “Predictive control of switched nonlinear systems with scheduled mode transitions,” IEEE Trans. on automatic control, v. 50, no. 11, pp. 1670-1680, 2005.
[3] J.B. Gomm, S.K. Doherty, and D. Williams,
“Experiment design considerations for
nonlinear system identification using neural
networks,” Computers and Chemical
Engineering, v. 21, p. 327-346, 1997.
[4] D. Kang, W. Yoo, and S. Won, “Multivariable TS fuzzy model identification based on mixture of Gaussians,” Int. Conference on Control, Automation and Systems, Seoul, Korea, pp. 929-932, 2007.
[5] S.L. Lacy and D.S. Bernstein, “Identification of FIR Wiener systems with unknown, noninvertible, polynomial nonliniearities,” Proc. In American Control Conference, pp. 893-898, 2002.
[6] H. Al-Duwaish and M.N. Karim, “A new method for the identification of Hammerstein model,” Automatica, v. 33, no. 10, pp. 1871-1875, 1997.
[7] M. Verhaegen, “Identification of the temperature product quality relationship in a multi component destillation column,” Chemical Engineering Communications, v. 163, pp. 111-132, 1998.
[8] T. Wigren, “Recursive prediction error identification using the nonlinear Wiener model,” Automatica, v. 29, pp. 1011-1025, 1993.
[9] F.Z. Chaoui, F. Giri, and Y. Rochdi, “Parameter identification of a class of Hammerstein plants,” Automatica, v. 37, pp. 749-756, 2001. [10]C.E. Garcia and M. Morari, “Internal Model
Control: A Unifying Review and Some New Results,” Ind. Eng. Chem. Process Res. Dev., 21:308-323, 1982.
![PYD Life Skill Development Volunteer Website [Compatibility Mode]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)