BAB 3
MODEL ESTIMASI REGRESI NONPARAMETRIK
Dalam melakukan estimasi pada suatu kasus regresi nonparametrik, ada banyak metode yang dapat digunakan. Yasin (2009) dalam makalahnya melakukan esti-masi regresi nonparametrik menggunakan metode Wavelet Shrinkage Neural Net-work pada model rancang tetap. Yasin menjelaskan bahwa fungsi W avelet meru-pakan fungsi matematika yang mempunyai sifat-sifat tertentu, diantaranya berosi-lasi di sekitar nol (seperti fungsi sinus dan cosinus) dan terlokalisasi dalam domain waktu, artinya pada saat nilai domain relatif besar maka fungsi W aveletbernilai nol.
Selain W avelet, ada juga beberapa metode untuk melakukan estimasi fungsi regresi nonparametrik; seperti Nadaraya-Watson yang akan digunakan peneliti un-tuk menangani persoalan yang dimaksud.
3.1 Estimator
Secara umum, parameter populasi akan diberi simbolm.Jadi merupakan rata-rata µ, simpangan bakuσ,proporsiπ dan sebagainya. Jika myang tidak diketahui har-ganya, ditaksir oleh harga ˆm, maka ˆm dinamakan penaksir. terdapat dua macam estimasi:
3.1.1 Estimasi titik
3.1.2 Estimasi interval
Sebuah estimasi interval (interval estimate) dari sebuah parameterm adalah suatu sebaran nilai-nilai yang digunakan untuk mengestimasi m. Proses mengestimasi dengan suatu sebaran nilai-nilai ini disebut estimasi interval (interval estimation).
3.2 Nadaraya-Watson Estimator
Bilamana terdapat data yang sangat banyak dimanaX =xi, maka cara
mengata-sinya adalah dengan mencari nilai rata-rata setiapyi pada data tersebut. Dan juga
karenaX berdistribusi kontinu, maka tidak perlu dilakukan pengamatan berulang pada data dengan nilai yang sama.
Solusi dari persoalan tersebut adalah dengan memperhatikan ketetanggaan xi, untuk itu perlu dilakukan sejumlahpengamatan di ketetanggan tersebut. Trik
yang sangat jelas jelas adalah dengan cara melakukan estimasibias serta estimasi varians.
Andai dilakukan pengamatan pada sejumlah besar dataX. Misalkanx±h un-tuk sebarangbandwidth h > 0. Maka estimator Nadaraya-Watson (1964) ˆmN W(x)
yang ditunjukkan pada persamaan (3.1) merupakan rata-rata nilaiyi untuk
penga-matani sedemikian sehingga Xi berada pada ketetanggaannya.
ˆ
dengan K(u) merupakan Kernel.
Pada dasarnya, fungsi regresi dapat dituliskan seperti pada persamaan berikut.
m(x) =
18
Kemudian lakukan substitusi persamaan (3.3) dan (3.4) ke persamaan (3.2), maka diperoleh:
Pada persamaan tersebut,m(x) dinamakan estimator Nadaraya-Watson. Da-lam menghadapi persoalan regresi, para peneliti sangat menyarankan untuk meng-gunakan hanya fungsi Kernel orde kedua. Hal ini untuk menghindari ketidakasim-totisan distribusi data pengamatannya.
Dalam makalahnya. Isogai (1987) mengambil nilai hn = n−r untuk 0.2 <
r < 1. Kernel K merupakan fungsi kepadatan probabilitas yang berbatas pada bilangan riil dimana,
lim
Nadaraya (1964) mengindikasi bahwa jika Y adalah sebuah variabel random dannh2
n → ∞, maka (nhn)
1
2(m(x)−Em(x)) normal secara asimtotik dengan
rata-rata 0 dan variansE[Y2
|X =x]R K2
3.2.1 Distribusi yang asimtotis
KarenaE(yi|X =xi) =m(xi), maka persamaan regresinya dapat dituliskan seperti
pada persamaan (3.5).
yi =m(xi) +εi, i= 1, . . . , n (3.5)
dimanaε1, . . . , εnmerupakan nilaierror yang merupakan variabel random dengan
nilai ekspektasiE(εi|XI) = 0 dan nilai varians V(ε
2
i|xi) =σ
2 (x).
Perhatikan bahwa,
yi = m(xi) +εi,
= m(x) + (m(xi)−m(x)) +εi
dan oleh sebab itu,
1 nh
n
X
i=1 k
xi−x
h
yi =
1 nh
n
X
i=1 k
xi−x
h
BAB 4
HASIL DAN PEMBAHASAN
4.1 Estimasi regresi nonparametrik
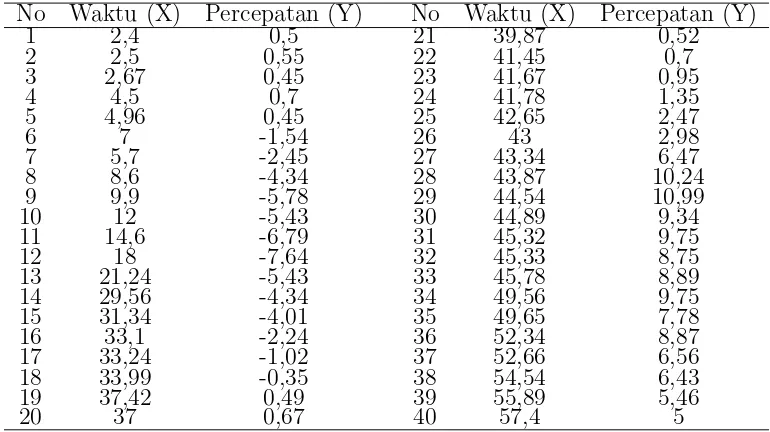
Hubungan antara variabel X dan variabelY pada tesis ini diambil data laju ken-daraan Sepeda Motor dengan banyak sampel pengamatan sebanyak 40. Variabel prediktor yang digunakan adalah waktu dan variabel respon yang digunakan adalah percepatan. Contoh kasus penerapan estimasi regresi nonparametrik dapat dilihat pada Tabel 4.1 berikut ini.
Tabel 4.1 Statistika deskriptif sepeda motor
No Waktu (X) Percepatan (Y) No Waktu (X) Percepatan (Y)
1 2,4 0,5 21 39,87 0,52
2 2,5 0,55 22 41,45 0,7
3 2,67 0,45 23 41,67 0,95
4 4,5 0,7 24 41,78 1,35
5 4,96 0,45 25 42,65 2,47
6 7 -1,54 26 43 2,98
7 5,7 -2,45 27 43,34 6,47
8 8,6 -4,34 28 43,87 10,24
9 9,9 -5,78 29 44,54 10,99
10 12 -5,43 30 44,89 9,34
11 14,6 -6,79 31 45,32 9,75
12 18 -7,64 32 45,33 8,75
13 21,24 -5,43 33 45,78 8,89
14 29,56 -4,34 34 49,56 9,75
15 31,34 -4,01 35 49,65 7,78
16 33,1 -2,24 36 52,34 8,87
17 33,24 -1,02 37 52,66 6,56
18 33,99 -0,35 38 54,54 6,43
19 37,42 0,49 39 55,89 5,46
20 37 0,67 40 57,4 5
Tabel 4.2 Nilai rata-rata, nilai tengah dan standar deviasi
Variabel N Min Maks Mean Q2 Standar deviasi Waktu (X) 40 2,4 57,4 32,13 38,64 17,84 Percepatan (Y) 40 -7,64 10,99 1,89 0,68 5,36
Data sampel pengamatan ada sebanyak 40 data, dengan waktu minimum sebesar 2,4 detik dengan waktu maksimal sebesar 57,4 detik dan percepatan minimum sebesar −7,64 m/s2
, percepatan maksimal 10,99 m/s2
, rata-rata waktu sebesar 32,13 detik, dan percepatan sebesar 1,89 m/s2
, dengan nilai tengah waktu sebesar 38,64 detik dan percepatan 0,68 m/s2
, serta standar deviasi waktu sebesar 17,84 detik dan percepatan 5,36 m/s2
.
Bentuk hubungan antara variabel prediktor (waktu) dengan variabel respon (percepatan) dapat dilihat pada plot antara kedua variabel tersebut seperti pada gambar berikut ini:
22
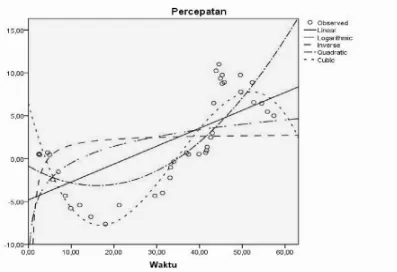
Selanjutnya dengan bantuan software SPSS, analisis estimasi regresi hubungan antara variabel prediktor (waktu) dengan variabel respon (percepatan) juga dapat dilihat dari plot antara kedua variabel seperti pada gambar berikut ini:
Apabila data yang telah ada juga dibandingkan dengan menggunakan program R dari data deskriptif Sepeda Motor dapat dilihat seperti pada gambar berikut ini:
Gambar 4.3 Diagram pencar data sepeda motor
24
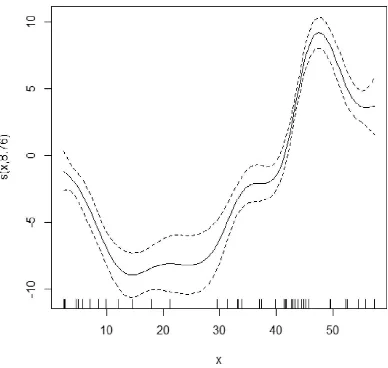
Berikut adalah hasil dari program R yang akan memperlihatkan bentuk model formula kernel:
Gambar 4.4 Model formula nonparametrik
Dengan demikian, dari data hubungan antara variabel prediktor (waktu) dengan variabel respon (percepatan) dapat dibentuk model estimasi regresi nonparametrik nya, yaitu:
Y =−4,81753 + 0,209x
dengan nilai standar error sebesar 3,90. Penduga Kernel didefinisikan seperti pada persamaan berikut ini.
f(x;h) = 1 40
40 X
i=1
Kh(x−Xi) (4.1)
Berkaitan dengan model persamaan regresi yang telah didapat, suatu model dikatakan baik apabila nilai koefisien determinasi (R2
) mendekati 1, dari Gambar 4.3 memperlihatkan bahwa koefisien determinasi (R2
Kemudian dalam hal kaitan dengan metode kernel, yang mana model estimasi regresi nonparametrik dilakukan dengan menggunakan metode kernel, maka uku-ran sampel optimal untuk membentuk interval yang telah diperoleh dari gambar 4.1, gambar 4.2, dan gambar 4.3, dengan menggunakan metode kernel mengan-dalkan pada beberapa sifat asimptomatik dari Nadaraya-Watson.
Maka estimator Nadaraya-Watson (1964) ˆmN W(x) yang ditunjukkan pada
persamaan (3.1) merupakan rata-rata nilaiyi, dimana dalam hal ini variabel y
di-gunakan untuk menerangkan Percepatan, untuk pengamatanisebanyak 40 penga-matan sedemikian sehingga Xi, dimana dalam hal ini variabelx digunakan untuk
menerangkan Waktu, diperolah persamaan sebagai berikut:
ˆ
mN W(W aktu) =
P40
i=1K(|x−xi| ≤h)yi P40
i=1K(|x−xi| ≤h)
= P40
i=1yiK(
x−xi
h )
P40
i=1K(
x−xi
h )
(4.2)
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Statistik nonparametrik merupakan kumpulan metode untuk analisis data yang menawarkan sebuah pendekatan dengan cara-cara pengambilan kepu-tusan. Salah satu cara yang digunakan dalam model etimasi regresi nonpa-rametrik ialah dengan metode Kernel.
2. Dengan menghadirkan fungsi regresi nonparametrik, dapat dimodelkan esti-masi Nadaraya-Watson berdasarkan metode Kernel.
3. Berdasarkan hasil pembahasan hubungan non-linear antara dua variabel seper-ti pada contoh kasus untuk data Sepeda Motor dimana variabel Waktu (X) yang dibutuhan dengan variabel Percepatan (Y) berpengaruh pada laju Sepe-da Motor dengan model estimasi regresi nonparametrik yang diperoleh Sepe- da-pat dikatakan baik dan memiliki hubungan antar variabel yang cukup erat. Fungsi s(x) yang menyatakan suatu fungsi yang digunakan untuk menen-tukan bentuk spsesifikasi model suatu formula, menunjukkan bahwa pemulu-san yang telah dilakukan mendekati baik, dengan nilai GCV minimum yaitu 2,3833.
4. Apabila dilihat dari grafik pada gambar 4.1, gambar 4.2, dan gambar 4.3 bahwa dari 0 detik sampai 20 detik kurva turun dan setelah waktu 20 detik kurva naik kembali sampai ke 50 detik. Hal ini sesuai dengan asumsi penggu-naan regresi nonparamatrik, yakni contoh kasus yang diambil bersifat acak dan kontinu dan data yang tidak berdistribusi normal.
5.2 saran