145
Prosiding Seminar Nasional Teknologi Elektro Terapan2017 Vol.01 No.01, ISSN: 2581-0049
Kontrol Uji Torsi Pada
Wind Turbine
di Dalam
Wind Tunnel
Budhy Setiawan
*a), Wahyu Aulia Nurwicaksana
a), Supriatna Adhisuwignjo
a)Abstrak: Dengan perkembangan kebutuhan tenaga listrik yang terus meningkat, hal ini meyebabkan perlunya pengembangan pemanfaatkan energi terbarukan. Salah satu sumber energi terbarukan adalah energi angin yang dimanfaatkan untuk menghasilkan energi listrik dengan menggunakan Sistem berupa turbin angin. Pembuatan turbin angin memerlukan suatu pengujian awal yaitu menggunkan terowongan angin sebagai seksi uji. Pengukuran yang dilakukan adalah pengukuran RPM, torsi, daya kincir , dan efisiensi daya. Sensor optocoupler digunakan untuk mengukur RPM, Sensor Load cell untuk mengukur beban yang diberikan, motor stepper untuk mengatur beban yang diberikan. Dalam pengujian kincir angin tipe savonius daya maksimal yang diperoleh adalah 9.58 Watt pada kecepatan angin 8 m/s dengan kecepatan putaran 416 RPM dan torsi 0.22 Kgm. Efisiensi daya maksimal tipe savonius sebesar 30.82 % pada kecepaan angin 4 m/s, daya kincir 2.13 Watt, dan daya angin 6.91 Watt. Setiap pembebanan yang diberikan pada poros akan mengurangi kecepatan berputar kincir Semakin tinggi torsinya dan semakin kecil RPMnya maka daya yang dihasilkan akan semakin tinggi pula, begitu juga sebaliknya.
Kata Kunci –Daya, Efisiensi Daya, RPM, Torsi, Turbin Angin
1. PENDAHULUAN
Salah satu energi terbarukan yang dapat dikonversikan energinya menjadi energi listrik adalah energi angin [1]. Di samping itu, angin merupakan sumber energi yang tak ada habisnya sehingga pemanfaatan sistem konversi energi angin akan berdampak positif terhadap lingkungan [2]. Penggunaan kecepatan angin sebagai sumber energi listrik dilakukan dengan memanfaatkan kecepatan angin tersebut untuk memutar turbin angin. Namun pengukuran kinerja turbin angin di lapangan yang sangat tidak ekonomis secara teknis sehingga dapat digantikan dengan fasilitas pengujian turbin angin (wind turbine) di dalam terowongan angin (wind tunnel) [3]. Dengan memperhatikan permasalahan tersebut, maka untuk riset turbin angin akan dicari sebuah desain dan bahan beserta analisanya untuk membuat kincir angin yang lebih baik dari sebelumnya serta desain turbin angin di dalam terowongan angin dengan beberapa parameter yang dapat diamati yaitu parameter kinerja turbin angin yang terdiri dari daya (P-watt) , kecepatan putaran dengan rotasi per menit (rpm), dan torsi pada turbin angin (Torque-grcm). Tujuan dari penelitian ini adalah mengukur nilai dari kecepatan putaran (RPM), Torsi, daya, dan efisiensi dari kincir
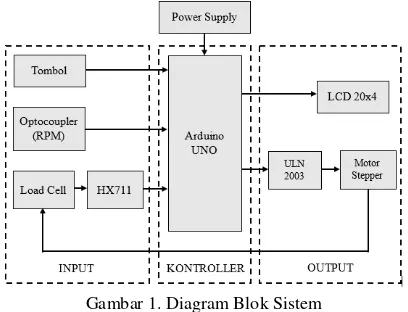
1. Sensor = optocoupler, load cell 2. Kontroller = Arduino UNO 3. Actuator = Motor Stepper 4. Display = LCD 20x4 diletakkan di dalam wind tunnel yaitukincir pada wind turbine akan berputar akibat adanya angin dari sumber yang berupa fan dengan kecepatan angin yang dapat diatur mulai minimum hingga maksimum, Sehingga dapat memutar kincir. Untuk pengukuran yang di baca di kincir yaitu nilai RPM, torsi, dan daya kincir. Untuk pengukuran RPM menggunakan sensor kecepatan (optocoupler), untuk pengukuran torsi menggunakan sistem pengereman pada kincir menggunakan magnet yang di gantungkan di load cell. Pada bagian bawah kincir terdapat piringan besi yang akan digunakan sebagai pengereman menggunakan magnet yang di atur jaraknya dari piringan besi menggunakan motor stepper. Untuk motor steeper akan berputar jika berat di set sesuai kebutuhan maka motor akan berputar dan memutar ulir yang menggantungkan magnet di load cell hingga berat yang dibaca load cell sesuai dengan set point yang diberikan.
Setelah nilai RPM dan berat didapatkan, maka selanjutnya yaitu menghitung daya kincir dengan persamaan [2]
P = T . ω (1).
* Korespondensi: [email protected]
Dimana Torsi didapat dari persamaan [2]
T= F . r (2).
Sedangkan kecepatan sudut diperoleh dari persamaan [2]
2.π.RPM/60 (3).
Setelah mendapatkan nilai daya yang konstan maka dapat dicari nilai effisiensi daya dari wind turbine dengan menggunakan persamaan [4]
(4).
2.3 Diagram Blok Sistem
Diagram blok sistem dari wind turbine menggunakan beberapa komponen-komponen seperti yang ditunjukkan dalam Gambar 1.
Gambar 1. Diagram Blok Sistem
2.4 Diagram Blok Kontrol
Gambar 2 menunjukkan diagram blok kontrol dari sistem. Kontrol dalam sistem ini merupakan sistem yang mengatur putaran dan arah putaran motor stepper. Nilai set point yang dimasukkan adalah nilai berat dari pengukuran sensor load cell. Dari hasil pembacaan sensor load cell masuk ke dalam arduino uno, setelah itu data tersebut dibandingkan dengan set point dan Arduino uno akan mengkalkulasi data apakah sudah sesuai dengan set point atau belum.
Gambar 2. Diagram Blok Kontrol
2.5 Perancangan dan Pembuatan Mekanik
Kincir angin tipe savonius memiliki kelebihan dalam hal kemampuan berputar dengan kecepatan angin yang rendah. Desain dan hasil pembuatan kincir angin tipe savonius diperlihatkan pada Gambar 3.
(a) (b) Gambar 3 (a) Desain Kincir Angin Tipe Savonius (b) Hasil Pembuatan Kincir Angin Tipe Savonius
2.6 Perancangan dan Pembuatan Elektrik
A. Rangkaian Modul Sensor Optocoupler
Sensor optocoupler digunakan untuk mendeteksi kecepatan putaran motor dengan mengeluarkan tegangan variabel yang nantinya disalurkan menuju arduino uno. Tegangan keluaran rotary encoder dipengaruhi oleh kecepatan putaran motor, dimana semakin cepat putaran motor berputar, maka semakin besar tegangan yang dikeluarkan menuju arduino uno. Rangkaian dari sensor optocoupler ditunjukkan seperti pada Gambar 4.
Gambar 4. Rangkaian Sensor Optocoupler
B. Rangkaian Load Cell dan HX711
Pada rangkaian load cell seperti Gambar 5. Ditunjukkan bahwa rangkaian load cell terdiri dari dua modul, single point load cell berbahan Aluminium-alloy dan modul yang berpresisi sangat tinggi yaitu IC HX711 Weight Scale Sensor yang memang dirancang khusus untuk penggunaan pada sensor berat.
Gambar 5. Rangkaian Load Cell dan HX711
147 sedangkan pin common dihubungkan ke Vcc atau ground. Seperti yang terlihat di Gambar 6.
Gambar 6. Rangkaian Motor Stepper dan Driver ULN2003
2.7 Perancangan dan Pembuatan Software
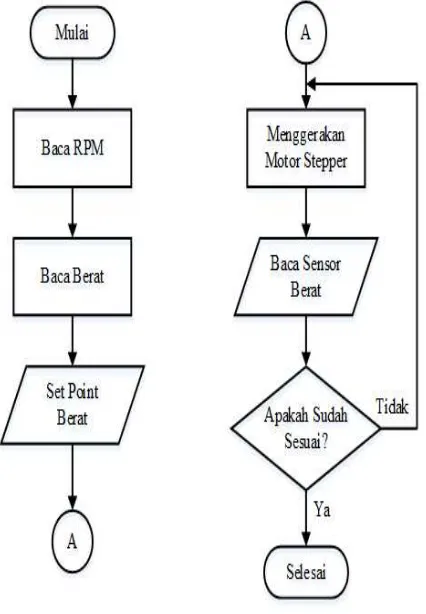
Bahasa pemrograman yang digunakan adalah bahasa C melalui software Arduino.cc. Arduino UNO digunakan sebagai pengatur data input seperti sensor optocoupler, sensor load cell dan tombol, selanjutnya data output akan diproses melalui port yang telah ditentukan. Flowchart sistem yang dirancang ditunjukkan dalam Gambar 7.
Gambar 7. Flowchart Sistem
3. HASIL DAN PEMBAHASAN
3.1 Pengujian Optocoupler
Hasil pengujian sensor optocoupler dan tachometer serta perhitungan error ditunjukkan pada tabel 1.
Tabel 1. Hasil Pengujian Sensor Optocoupler
Berdasarkan hasil perhitungan error sensor optocoupler seperti yang ditunjukkan pada tabel 1. didapatkan nilai error maksimal sebesar 1% dan error minimal sebesar 0.19%. Error dari hasil pengujian ini tidak cukup besar sehingga masih dapat ditoleransi dan tidak akan mengganggu kinerja sistem.
3.2 Pengujian Load Cell
Hasil pengujian sensor load cell dan timbangan digital serta perhitungan error ditunjukkan pada tabel 2.
Tabel 2. Hasil Pengujian Load Cell
Berdasarkan hasil perhitungan error sensor load cell seperti yang ditunjukkan pada tabel 2. didapatkan nilai error maksimal sebesar 2.6% dan error minimal sebesar 0.1%. Error dari hasil pengujian ini tidak cukup besar sehingga masih dapat ditoleransi dan tidak akan mengganggu kinerja sistem.
3.3Pengujian Motor Stepper
Hasil pengujian dari motor stepper ditunjukkan pada tabel 3. untuk arah putar kanan dan pada tabel 4. untuk arah putar kiri.
Tabel 3. Pengujian Motor Steeper dan uln2003 Putar Kanan
3.4 Pengujian Keseluruhan dari Kincir Angin Tipe Savonius
Pengujian keseluruhan ini membahas tentang hubungan antara torsi dan pembebanan, hubungan antara torsi dan kecepatan angin, hubungan antara daya kincir dengan torsi, dan daya kincir dengan RPM. Pengujian dilakukan dengan menggunakan kincir angin tipe savonius.
Rangkaian keseluruhan yang digunakan ditunjukkan pada Gambar 8 sedangkan untuk hasil pengukuran dapat dilihat pada Tabel 5 sampai Tabel 10, dan Gambar 9 sampai Gambar 11.
Gambar 8. Rangkaian Keseluruhan
Tabel 5. Pengaruh Pembebanan terhadap RPM, Torsi, dan Daya pada Savonius dengan Kecepatan angin 2 m/s.
Tabel 6. Pengaruh Pembebanan terhadap RPM, Torsi, dan Daya pada Savonius dengan Kecepatan angin 4 m/s.
Tabel 7. Pengaruh Pembebanan terhadap RPM, Torsi, dan Daya pada Savonius dengan Kecepatan angin 6 m/s.
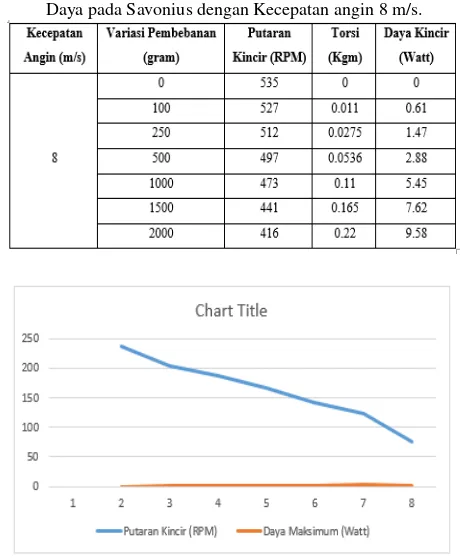
Tabel 8. Pengaruh Pembebanan terhadap RPM, Torsi, dan Daya pada Savonius dengan Kecepatan angin 8 m/s.
Gambar 9. Grafik Hubungan Antara RPM dan Daya pada Kecepatan Angin 4 m/s
149 Dari pengujian kincir angin savonius seperti pada Tabel 5 sampai Tabel 8, diperoleh data torsi yang selalu naik ketika diberikan beban yang lebih tinggi. Karena hubungan Torsi dan pembebanan yaitu berbanding lurus artinya semakin besar beban beban yang di berikan maka torsi yang terjadi juga semakin besar dan sebaliknya semakin kecil pembebanan yang di berikan pada kincir maka torsinya juga semakin kecil. Semakin tinggi torsinya dan semakin kecil RPMnya maka daya yang dihasilkan akan semakin tinggi pula, begitu juga sebaliknya.
Tabel 9. Daya Maksimum kincir angin savonius Pada Beberapa Kecepatan Angin
Dari data tabel pengaruh pembebanan yang ditunjukkan pada Tabel 5 sampai Tabel 8 menunjukkan bahwa daya maksimum dengan kecepatan angin bervariasi mulai 2 m/s sampai 8 m/s adalah 9.58 Watt, dengan kecepatan putaran kincir 416 RPM, torsi 0.22 Kgm dan kecepatan angin 8m/s. Sedangkan untuk daya terkecil adalah 0.05 Watt dengan kecepatan putaran kincir 37 RPM, torsi 0.011 Kgm, dan kecepatan angin 2 m/s seperti yang ditunjukkan pada Tabel 9.
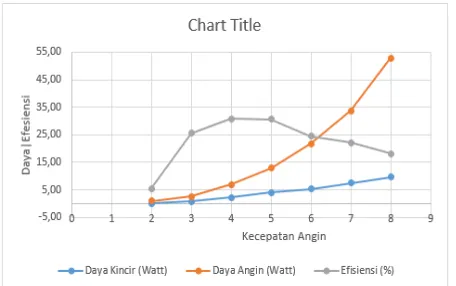
Tabel 10. Efisiensi Daya Kincir Angin Savonius
Gambar 11. Grafik Hubungan Antara Daya Angin, Daya Kincir dan Efesinsi Daya pada Kincir Angin Savonius
Jadi berdasarkan beberapa pengujian yang dilakukan dan diperoleh data yang ditunjukkan pada tabel 10. bahwa koefisien daya tertinggi adalah 30.82%, dengan daya kincir 2.13 Watt, dan daya angin 6.91 Watt. Sedangkan koefisien daya terkecil yaitu 5.38 dengan daya kincir 0.05 Watt, dan daya angin 0.93 Watt.
Sehingga dari grafik 13. dapat dikatakan bahwa efesiensi daya akan terus naik hingga kecepatan angin 4 dan akan mulai turun dari kececpatan angin 5 hingga 8. Hal ini karena merupakan karakteristik dari kincir angin yaitu ketika sudah mencapai efisiensi tertinggi pada kecepatan angin tertentu maka efisiensi pada kecepatan angin yang lebih tinggi akan menurun. Sehingga jika ingin mendapatkan efesiensi tertinggi menggunakan kecepatan angin 4 m/s sampai 6 m/s.
4. KESIMPULAN dan SARAN
4.1 Kesimpulan
Dari hasil perancangan dan pengujian yang telah dilakukan, dapat diambil beberapa kesimpulan. Berikut merupakan kesimpulan yang telah didapatkan :
1. Sensor optocoupler dapat mengukur rpm dari wind turbine dengan menggunakan disc rotary 24 lubang. Dengan kecepatan putaran hingga ±580 RPM.
2. Sensor Load Cell dapat mengukur berat beban yang diberikan sampai dengan 5 Kg.
3. Setiap pembebanan yang diberikan pada poros akan mengurangi kecepatan berputar kincir hal ini terjadi karena adanya pengereman yang disebabkan gesekan antara magnet dan piringan besi yang dapat diatur jaraknya. Sehingga dari pengereman tersebut didapatkan nilai torsi. 4. Setelah dilakukan pengolahan data dari kincir
angin tipe savonius diperoleh data daya maksimum adalah 9.58 Watt pada kecepatan angin 8 m/s dengan kecepatan putaran 416 RPM dan torsi 0.22 Kgm.
4.2 Saran
Alat yang telah dibuat ini masih banyak kekurangan. Perlu adanya perbaikan dan penyempurnaan agar alat ini dapat bekerja secara optimal. Ada beberapa hal yang disarankan untuk perbaikan dan penyempurnaan yaitu:
1. Dari segi mekanik, sebaiknya perlu dibuat kincir angin dengan tipe yang lain dan dapat dibuat dengan bahan yang lebih baik juga. 2. Dari segi elektronik, perlu adanya perbaikan
agar pada wiring elektronik perlu disempurnakan dan pada bagian sensor dapat menggunakan sensor yang lebih baik. 3. Dari segi software, perlu adanya metode
kontrol lain digunakan sebagai pembanding apakah dengan metode baru yang digunakan lebih baik atau kurang baik dibandingkan menggunakan metode yang digunakan saat ini.
Daftar Pustaka
[1]. Prasetya, Tomas, “Unjuk Kerja Kinerja Kincir Angin Propeller tiga Sudu Datar dengan Lebar 11,5 cm dari Bahan Triplek Serta Variasi Lapisan Permukaan Aluminium dan Anyaman Bambu”, Tugas Akhir, Universitas Sanata Dharma Yogyakarta, 2015.
[2]. Ikhsan, Ikhwanul, “Analisis Pengaruh Pembebanan Terhadap Kinerja Kincir Angin Tipe Propeller Pada Wind Tunnel Sederhana”, Tugas Akhir, Universitas Hasanuddin Makasar, 2013.
[3]. Subagyo, Muhammad Muflih, dan Andre Yulian Atmojo, “Sistem Akuisisi Data Pengujian Kinerja Daya Turbin Angin Menggunakan Fasilitas Terowongan Angin”, Jurnal Standarisasi Vol 17 No.2, 2015.