SKRIPSI
AMALIA
050803033
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERANAN PERSYARATAN KARUSH-KUHN-TUCKER DALAM MENYELESAIAN PEMROGRAMAN KUADRATIS
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
AMALIA
050803033
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PERANAN PERSYARATAN KARUSH KUHN
QQQQQQQQQQQQQQQQQ.gTUCKER DALAM MENYELESAIKAN
QQQQQQQQQQQQQQQQQ .PEMROGRAMAN KUADRATIK
Katagori : SKRIPSI
Nama : AMALIA
Nomor Induk Mahasiswa : 050803033
Program Studi : PROGRAM (S1) MATEMATIKA
Departemen : MATEMATIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
qqqqqqqqqqqqqqqqqqqqqqqqqqALAM (FMIPA) UNIVERSITAS SUMATERA
qqqqqqqqqqqqqqqqqqqqqqqqqkUTARA
Diluluskan di
Medan, Desember 2009
Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Drs. H. Haludin Panjaitan Drs. Marwan Harahap, M.Eng
NIP. 194603091979021001 NIP. 194612251974031001
Diketahui/Disetujui oleh
Departemen Matematika FMIPA USU Ketua,
PERNYATAAN
PERANAN PERSYARATAN KARUSH KUHN TUCKER DALAM MENYELESAIAN PEMROGRAMAN KUADRATIS
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Desember 2009
PENGHARGAAN
Puji dan syukur penulis ucapkan kehadirat Allah SWT karena atas berkah dan rahmat-Nya kepada penulis hingga dapat menyelesaikan skripsi ini.
Pada kesempatan ini penulis mengucapkan banyak terima kasih kepada : 1. Bapak Drs. Marwan Harahap, M.Eng dan Bapak Drs. H. Haludin Panjaitan,
selaku pembimbing pada penyelesaian skripsi ini yang telah memberikan bimbingan, pengarahan serta pemeriksaan terhadap skripsi ini sehingga dapat selesai dengan baik.
2. Bapak Dr. Saib Suwilo, M.Sc dan Drs. Henry Rani Sitepu, M.Si, selaku Ketua dan Sekretaris Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Sumatera Utara.
3. Bapak Prof. DR. Eddy Marlianto, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, seluruh Staf Pengajar jurusan Matematika yang telah mendidik penulis selama mengikuti perkuliahan. 4. Ayahanda dan Ibunda tercinta, abang dan kakak, serta seluruh keluarga yang telah
memberikan semangat dan dukungan yang tak ternilai harganya.
ABSTRAK
ABSTRACT
DAFTAR ISI
Halaman
Persetujuan ii
Pernyataan iii
Penghargaan iv
Abstrak v
Abstract vi
Daftar Isi vii
Daftar Tabel viii
Daftar Gambar ix
Bab 1 Pendahuluan
1.1 Latar Belakang 1
1.2 Perumusan Masalah 2
1.3 Tinjauan Pustaka 3
1.4 Tujuan Penelitian 5
1.5 Kontribusi Penelitian 6
1.6 Metode Penelitian 6
Bab 2 Landasan Teori
2.1 Pemrograman Nonlinier 7
2.1.1 Pemrograman Nonlinier Tak Berkendala 7
2.1.2 Pemrograman Nonlinier Berkendala 8
2.2 Permasalahan Pemrograman Kuadratis 12
2.2.1 Pemilihan Portofolio dengan Sekuritas Beresiko 12 2.2.2 Masalah Transportasi dengan Diskon Volume pada 14 Biaya Pengiriman Barang
2.3 Konveksitas Fungsi 16
2.6.1 Fungsi Konveks atau Konkaf Satu Variabel 17
2.6.2 Fungsi Konveks dan Konkaf untuk Beberapa Variabel 17
2.4 Matriks Hessian 19
2.5 Matriks Definite Positif 22
2.6 Persyaratan Karush Khun Tucker 24
2.7 Masalah Komplementaritas 27
Bab 3 Pembahasan
3.1 Pemrograman Kuadratis Tak Berkendala 29
3.2 Pemrograman Kuadratis Berkendala modifikasi simpleks 30
3.3 Pemrograman Kuadratis Karush Kuhn Tucker 37
Bab 4 Penutup
4.1 Kesimpulan 41
4.2 Saran 42
DAFTAR TABEL
Halaman
Table 1.1 Uji Konveksitas untuk Fungsi Dua Variabel 19
DAFTAR GAMBAR
Halaman
Gambar 1.1 Bentu Himpunan Konveks dan bukan Konveks 16
Gambar 1.2 Plot dari f(x1,x2)=x13+x23 +212+4x22+6 21
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Pesatnya perkembangan ilmu pengetahuan dan teknologi membuat matematika
menjadi sangat penting artinya. Oleh karena itu dapat dikatakan bahwa perkembangan
ilmu pengetahuan dan teknologi tersebut tidak lepas dari peranan matematika. Hampir
dapat dipastikan bahwa setiap bagian dari ilmu dan teknologi baik dalam unsur kajian
umum ilmu murni maupun terapannya memerlukan peranan matematika sebagai ilmu
bantunya.
Salah satu bagian dari matematika terapan adalah program linear (linear
programming) yang merupakan suatu model dari penelitian operasional (operation
research) yang digunakan untuk memecahkan masalah optimasi. Dalam masalah
optimasi ini kita diminta untuk menentukan nilai optimum (nilai maksimumatau nilai
minimum) dari suatu fungsi matematik. Namun dalam pemograman linier semua
fungsi yang terlibat (fungsi tujuan dan fungsi kendala) adalah linier. Meskipun pada
dasarnya diaplikasikan pada banyak masalah praktis, asumsi ini sering kali tidak
sesuai. Pada kenyataannya, banyak ahli ekonomi menemukan drajat nonlinearitas
yang merupakan suatu aturan dan bukan merupakan suatu perkecualian dalam
berbagai masalah. Oleh sebab itu, sering kali memang perlu untuk segera
mengarahkan pada masalah pemrograman nonlinier, sehingga kita memfokuskan
perhatian pada area yang penting ini.
Terdapat banyak jenis masalah pemrograman nonlinier, tergantung pada
karakteristik fungsi tujuan dan fungsi kendala. Salah satunya adalah pemograman
kuadratis yang merupakan bentuk khusus dari pemrograman nonlinier. Dimana
berbentuk kuadratis. Oleh karena itu, satu-satunya perbedaan antara pemrograman ini
dengan pemrograman linier terletak di fungsi tujuannya yang melibatkan pangkat dua
dari variabel atau perkalian dari dua variabel.
Beberapa metode telah dikembangkan untuk menyelesaikan kasus
pemrograman kuadratis dengan asumsi tambahan fungsi tujuan merupakan fungsi
konkaf. Salah satu metode untuk menyelesaikan masalah pemrograman kuadratis
adalah dengan persyaratan Karush-Kuhn-Tucker. Metode ini sangat efektif untuk
permasalahan optimasi nonlinier dengan kendala pertidaksamaan.
1.2 Perumusan Masalah
Dengan pendekatan persyaratan Karush-Kuhn-Tucker dapat diperoleh
optimasi dari pemrograman kuadratis. Dalam hal ini kondisi yang perlu diperhatikan
adalah mengikuti syarat cukup agar mendapatkan nilai-nilai variabel yang optimal
untuk mencapai hasil yang diinginkan.
1.3 Tinjauan Pustaka
1. Pemrograman Kuadratis
Pemrograman kuadratis adalah masalah optimasi dimana memaksimumkan
atau meminimumkan fungsi tujuan yang berbentuk kuadratis dengan fungsi
kendalanya berbentuk persamaan atau pertidaksamaan linier.
Bentuk fungsi kuadratis dengan variabel x=
(
x1,x2,...,xn)
adalah :( )
k jn
k n
j kj n
j j
jx q x x
c x
f
∑
∑∑
= =
=
+ =
1 1
1 2
1
Dengan menggunakan notasi matriks maka persamaan diatas dapat
f
( )
x cx xTQx2 1
+ =
Dengan kendala Ax≤b dan x≥0
Dimana:
nxn
Q∈ℜ = matriks simetris (nxn) yang dikenal juga dengan matriks Hessian
mxn
A∈ℜ = matriks kendala
n
x∈ℜ = vektor kolom dari variabel keputusan n
c∈ℜ = vector baris dari fungsi tujuan
m
b∈ℜ = vector kolom dari kendala bagian kanan
T = transposisi matriks
Adanya faktor 2 1
pada fungsi tujuan merupakan konstanta qij (elemen dari
Q) dimana qij =qji. Maka setelah melakukan perkalian matriks dan vektor maka
fungsi tujuannya dinyatakan dalam qij, cj(elemen c) dan untuk tiap suku dengan
j
i= dalam penjumlahan ganda xixj = x2j sehingga -
2 1
ij
q merupakan koefisien dari
2
j
x . Ketika i≠ j maka −
(
qijxixj +qijxjxi)
2 1
, sehingga −qij adalah koefisien total
untuk perkalian xi dan xj.
Ketika fungsi objektif f (x) adalah cembung sempurna (konkaf) untuk semua daerah layak diperoleh titik yang merupakan minimum lokal dan juga global. Maka
dalam kondisi seperti ini menjamin bahwa Q adalah definite positif.
2. Kondisi Karush-Kuhn-Tucker
Pada tahun 1951 Kuhn Tucker mengemukakan suatu teknik optimisasi yang
dapat digunakan untuk pencarian titik optimum dari suatu fungsi yang berkendala.
Metode Karush Kuhn Tucker ini dapat dipergunakan untuk mencari solusi yang
optimum dari suatu fungsi tanpa memandang sifat dari fungsi tersebut apakah linier
pencarian titik optimum dari setiap fungsi. Metode Karush Kuhn Tucker dapat
digunakan untuk memecahkan persoalan baik yang nonlinier maupun yang linier.
Jika kita menghadapi masalah optimasi dalam bentuk :
Maksimumkan / minimumkan : Z = f
( )
X dengan t nx x x
X ={ 1, 2,..., }
Dengan kendala : gi
( )
X ≤/≥0 dengan i= 1,2,3,…,mX ≥0
m≤n (jumlah kendala lebih kecil dari variabel)
Pertama tuliskan kembali persyaratan-persyaratan yang tak negative seperti
0 ,...,
0 ,
0 2
1 ≤ − ≤ − ≤
−x x xn , sehingga himpunan kendalanya adalah m+n persyaratan
ketidaksamaan yang masing-masing dengan tanda lebih kecil dari pada atau sama
dengan. Kemudian tambahkan variabel-variabel kurang xn2+1,xn2+2,...,x22n+m
berturut-turut pada ruas kiri dari kendala-kendala tadi, yang dengan demikian merubah
tiap-tiap ketidaksamaan menjadi suatu kesamaan. Variabel-variabel kendur (slack
variables) yang ditambahkan disini berbentuk suku-suku kuadrat untuk menjamin
bahwa mereka tak negatif. Kemudian bentuk fungsi Lagrange :
( )
[
( )
]
[
2]
11 1
2
i n i n m
m i m
i
i n i
i g X x x x
X f
L +
+
+ =
= +
+ − −
− −
≡
∑
λ∑
λUntuk λ1,λ2,...,λm+n adalah pengali-pengali Lagrange. Terakhir selesaikan sistem persamaan
0
= ∂
∂
j
x
L
(
)
m n j=1,2,...,2 +
0
= ∂
∂
i
L
λ
(
i=1,2,...,m+n)
0
≥
i
λ
(
i=1,2,...,m+n)
Persamaan-persamaan diatas membentuk persyaratan Karush-Kuhn-Tucker
3. Kondisi Optimal dalam Pemrograman Kuadratis
Prosedur menggunakan Kondisi Karush-Kuhn-Tucker untuk memecahkan
suatu masalah optimasi dalam pemrograman kuadratis dengan kendala berupa suatu
pertidaksamaan, secara essensial melibatkan langkah-langkah yang sama seperti
halnya dalam menggunakan teorema Lagrange untuk memecahkan masalah optimasi
dengan kedala berupa persamaan, yaitu pertamabentuklah suatu ”Lagrangean” L.[3]
Jadi dalam hal ini dibentuk suatu fungsi
( )
x y x Qx cx y(
Ax b)
L = T + + −
2 1 ,
Dimana y adalah baris vektor dimensi m. Maka kondisi Karush-Kuhn-Tucker untuk
lokal minimum memenuhi
0
≥ ∂
∂
j
x L
, j=1,2,...,n c+xTQ+ yA≥0
0
≥ ∂ ∂
i
y L
, i=1,2,...,m Ax−b≤0
0
= ∂
∂
j j
x L
x , j=1,2,...,n xT
(
cT +Qx+ATy)
=0( )
x =0g
yi i , i=1,2,...,m y
(
Ax−b)
=00
≥
j
x , j=1,2,...,n x≥0 0
≥
i
y , i=1,2,...,m y≥0
Dimana
n
y∈ℜ = surplus variabel nonnegatif
m
v∈ℜ = slack variabel nonnegatif.
1.4 Tujuan Penelitian
Adapun tujuan penulisan ini adalah menguraikan cara dan persyaratan
Karush-Kuhn-Tucker untuk mendapatkan nilai optimum (nilai maksimum atau nilai minimum)
1.5 Kontribusi Penelitian
Selain untuk tambahan literatur dan pengetahuan pembaca mengenai metode
yang dapat digunakan dalam menentukan nilai optimum dari pemograman kuadratis,
dalam bidang ekonomi penelitian ini juga bermanfaat untuk membantu
memformulasikan pemrograman kuadratis dalam pemilihan portofolio dan
sekuritasnya yang beresiko.
1.6 Metode Penelitian
Metode penelitian dalam tulisan ini adalah :
1. Membuat formulasi model pemrograman kuadratis dalam bentuk persyaratan
Karush-Kuhn-Tucker
2. Fungsi tujuan yang telah dimodifikasi menjadi
( )
x f( )
X g( )
XL i
m
i
∑
= + =
1 1
,λ λ ; harus sesuai pada titik tersebut
3. Menghitung titik-titik kritis dan menguji nilai untuk fungsi objektif pada setiap
titik-titik kritis tersebut yang membuat nilai fungsi objektif menjadi optimum.
4. Mencari semua solusi
( )
x,λ dalam himpunan persamaan berikut( )
, =0∂
∂ λ
x x
L
j
; j=1,2,...,n
Dimana
( )
, ≥0∂
∂ λ
λ x
L
i
; λ≥0
( )
, =0∂
∂ λ
λ
λ L x
i
i ; i=1,2,...,l
5. Diperoleh titik-titik kritis yang merupakan solusi optimal dari pemrograman
BAB 2
LANDASAN TEORI
2.1 Pemrograman Nonlinier
Pemrograman nonlinier merupakan pemrograman dengan fungsi tujuannya
saja atau bersama dengan fungsi kendala berbentuk nonlinier yaitu pangkat dari
variabelnya lebih dari satu. Salah satu bentuk umun masalah pemrograman nonlinier
adalah untuk menentukan x=
(
x1,x2,...,xn)
sehingga mencapai tujuan untuk:Maksimumkan / Minimumkan : f
( )
xDengan kendala : gm
( )
x ≥0 dan 0≥ x
Dengan f
( )
x dan gm( )
x merupakan fungsi yang diketahui dengan n variabel keputusan.Terdapat banyak jenis masalah pemrograman nonlinier dalam berbagai bentuk.
Hal ini tergantung pada karakteristik fungsi tujuan dan kendalanya. Pemrograman
nonlinier dapat mempunyai kendala ataupun tidak mempunyai kendala.
2.1.1 Pemrograman Nonlinier Tak Berkendala
Pemrograman nonlinier tak berkendala merupakan masalah optimasi yang
tidak memiliki batasan-batasan, sehingga untuk x=
(
x1,x2,...,xn)
mempunyai fungsi tujuan adalahMaksimumkan / Minimumkan : f
( )
x0
= ∂
∂
j
x f
Pada x = x* , untuk j=1,2,...,n
Dimana f
( )
x merupakan fungsi konkaf, kondisi ini juga mencukupi, sehingga mencari solusi untuk x* tereduksi menjadi penyelesaian dari sistem n persamaanyang diperoleh dengan n turunan parsial sama dengan nol.
Ketika variabel xj memiliki kendala nonnegativitas atau xj ≥0, kondisi yang
diperlukan dan mungkin cukup akan berubah menjadi
⎩ ⎨ ⎧ = ≤ ∂
∂
0 0
j
x f
pada pada
, ,
* *
x x
x x
= =
jika jika
0 0
* *
> =
j j
x x
Untuk setiap .j
Setelah titik kritis yang memenuhi kondisi diketahui, masing-masing titik
digolongkan sebagai maksimum atau minimum lokal jika fungsi tersebut bersifat
konveks ataupun konkaf disekitar titik tersebut. Maksimum dan minimum global akan
ditemukan dengan membandingkan minimum lokal dan maksimum lokal dan
kemudian menguji nilai dari fungsi tersebut dengan sebagian variabel mendekati −∞ atau +∞. Jika fungsi diketahui konveks maupun konkaf, maka titik kritisnya pastilah
merupakan minimum global maupun mkasimum globalnya.
2.1.2 Pemrograman Nonlinier Berkendala
Pemrograman nonlinier berkendala merupakan masalah optimasi yang
memiliki batasan-batasan, sehingga untuk x=
(
x1,x2,...,xn)
, maka bentuk standard untuk program-program tak linier yang mengandung hanya kendala-kendala kesamaan(equality) adalah
Maksimumkan / Minimumkan : f
( )
xDengan kendala : g1
( )
x =0…………
( )
x =0Disini m≤n (jumlah kendala lebih kecil daripada variabel) , jika terjadi bahwa m > n, maka biasanya tidak dapat diselesaikan. Pada program minimasi dapat
diubah ke dalam bentuk program maksimasi dengan mengalikan fungsi objektif -1.
Suatu metode yang dapat dipakai untuk menyelesaikan masalah optimasi ini
adalah metode pengali Lagrange. Metode pengali Lagrange dipilih karena prinsip
kerjanya sederhana dan mudah dimengerti. Metode ini dimulai dengan pembentukan
fungsi Lagrangian yang didefinisikan sebagai:
(
X)
f( )
X g( )
X Lm
j m j
∑
= + =
1
,λ λ
Teorema:
Syarat perlu bagi sebuah fungsi f(X) dengan kendala gi(X)=0, dengan j=1,2,...,m
agar mempunyai minimum relatif pada titik X* adalah derivasi parsial pertama dari fungsi Lagrangenya yang didefinisikan sebagai L=L
(
x1,x2,...,xn,λ1,λ2,...,λm)
terhadap setiap argumennya mempunyai nilai nol.Teorema:
Syarat harus bagi sebuah fungsi f(X) agar mempunyai minimum (atau maximum)
relatif pada titik X* adalah jika fungsi kuadrat, Q, yang didefinisikan sebagai
j i n
i n
j i j
x
x
x
x
L
Q
∂
∂
∂
∂
∂
=
∑ ∑
=1 =1 2
dievaluasi pada X = X* harus definit positif (atau negatif) untuk setiap nilai dX yang
memenuhi semua kendala.
Syarat perlu agar i j
n
i n
j i j
x x x x
L
Q ∂ ∂
∂ ∂
∂
=
∑∑
=1 =1 2
menjadi definit positif (atau negatif) untuk
setiap variasi nilai dX adalah setiap akar dari polinomial, zi, yang didapat dari
(
)
(
)
(
)
0 0 0 0 0 0 0 0 0 3 2 1 2 23 22 21 1 13 12 11 2 1 3 2 1 2 22 12 2 23 22 21 1 21 11 1 13 12 11 K K M K M M M K M M M K K K K K K M K M M M K O M M K K K K mn m m m n n m m nn n n n n n n n g g g g g g g g g g g g gn g g z L L L L g g g L L z L L g g g L L L z L − − −Dengan
(
)
j i ij x x X L L ∂ ∂ ∂
= 2 *,λ dan
( )
j i ij x X g g ∂ ∂ = *Pengali Lagrange mempunyai arti secara fisik yang menarik. Misalkan
terdapat permasalahan optimasi dengan satu kendala sebagai berikut:
Maksimumkan / Minimumkan : f
( )
xDengan kendala : g
( )
x =bFungsi Lagrange-nya adalah
(
X)
f( )
X(
b g( )
X)
L ,λ = +λ −
Syarat perlu untuk penyelesaian diatas adalah :
0 = ∂ ∂ i x L
untuk i=1,2,...,n dan
0 = ∂ ∂ λ L
Persamaan diatas menghasilkan :
0 = ∂ ∂ − ∂ ∂ i i x g x f λ
untuk i=1,2,...,n
( )
=0−g X
Maka : 0 = ∂ ∂ ∂ − ∂ ∂ ∂ i i i i x x g x x f λ
untuk i=1,2,...,n
atau 0
1 1 = ∂ ∂ ∂ − ∂ ∂ ∂
∑
∑
− − i n i i i n i i x x g x x f λatau i
n i i i n i i x x g x x f ∂ ∂ ∂ = ∂ ∂ ∂
∑
∑
−−1 1
λ atau 43 42 1 43 42 1 dg i n i i df i n i i x x g x x f ∂ ∂ ∂ = ∂ ∂ ∂
∑
∑
−−1 1
λ
Menghasilkan hasil yang final yaitu : df =λdb atau df =λ*db
Dari Persamaan ini dapat ditarik kesimpulan bahwa: pada penyelesaian
optimum, perubahan fungsi tujuan f, berbanding lurus dengan perubahan kendala b
dengan faktor sebesar pengali Lagrange .
Bentuk standard dari program-program tak linier yang mengandung hanya
kendala-kendala ketidaksamaan adalah :
Maksimumkan / Minimumkan : f
( )
xDengan kendala : gi
( )
x ≤0 untuk i=1,2,...,n0
≥ x
Kunci dari penanganan permasalahan di atas adalah merubah kendala
pertidaksamaan menjadi persamaan dengan menambah variabel slack. Masalah
pemrograman ini ditandai dengan adanya kendala-kendala yang sama sepenuhnya
dengan pemrograman linier. Semua fungsi kendala gi
( )
x adalah linier, tetapi fungsitujuan f
( )
x berbentuk nonlinier. Masalah ini dipertimbangkan secara sederhana dengan hanya memiliki satu fungsi nonlinier yang diperhitungkan, bersama dengandaerah layak dari pemrograman linier. Sejumlah algoritma khusus yang didasari atas
perluasan metode simpleks telah dikembangkan untuk memperhitungkan fungsi tujuan
2.2 Permasalahan Pemrograman Kuadratis
Masalah pemrograman kuadratis memiliki fungsi tujuan yang berbentuk
kuadratis yang melibatkan xj2 dan xixj
(
i≠ j)
dan memiliki kendala berbentuk linier.Pemrograman kuadratis sangat penting karena dapat diterapkan pada berbagai
masalah yang ada. Beberapa contoh kasus yang merupakan masalah dari
pemrograman kuadratis ini adalah :
2.2.1 Pemilihan Portofolio dengan Sekuritas Beresiko
Saat ini para manjer professional dari portofolio besar biasa menggunakan
model komputer berbasis pemrograman nonlinier untuk memandu pekerjaan mereka.
Oleh karena itu inverstor harus memperhatikan baik ekspetasi pendapatan maupun
resiko investasi, pemrograman nonlinier digunakan untuk menentukan portofolio yang
pada asumsi tertentu dapat menghasilkan keseimbangan optimal antara kedua factor
tersebut. Pendekatan ini sebagian besar merupakan hasil riset yang dilakukan oleh
Harry Markowitz dan William Sharpe, pemenang hadiah nobel tahun 1990 dalam
bidang ekonomi karena hasil risetnya tersebut.
Model pemrograman nonlinier untuk masalah ii dapat dirumuskan sebagai
berikut. Misalkan terdapat n senis saham/sekuritas yang sedang dipertimbangkan
untuk masuk dalam portofolio, dan variabel keputusan xj
(
j=1,2,...,n)
adalah sharedari saham j yang masuk dalam portofolio. μi dan σjj adalah (estimasi) rata-rata dan varians masing-masing untuk pendapatan setiap share dari saham j, dengan σjj sebagai ukuran resiko dari saham ini. Untuk i=1,2,...,n
(
i≠ j)
, adalah σij kovariansi dari pendapatan setiap share antara saham i dan saham j. Oleh karena itu sulitmengestimasi seluruh nilai σij, langsung dari σii dan σjj. Kemudian, nilai ekspetasi
( )
xR dan variansi V
( )
x dari total pendapatan keseluruhan portofolio adalah( )
j nj jx
x
R
∑
= =
1
μ Dan
( )
jn
i
i n
j
ijx x
x
V
∑∑
= =
=
1 1
Dengan V
( )
x mengukur resiko yang terasosiasi dengan portofolio. Salah satu cara untuk mempertimbangkan keseimbangan antara dua faktor adalah denganmenggunakan V
( )
x sebagai fungsi tujuan untuk diminimalkan dan menggunakan kendala yang memastikan R( )
x tidak lebih kecil dari ekspetasi pendapatan minimum yang dapat diterima. Model pemrograman nonlinier yang lengkap adalahMinimumkan
( )
jn
i
i n
j
ijx x
x
V
∑∑
= =
=
1 1
σ
Dengan kendala xj L
n
j
j ≥
∑
=1
μ
B x
p j
n
j
j ≥
∑
=1
0
≥
j
x untuk j=1,2,...,n
dengan L adalah ekspetasi pendapatan minimum yang dapat diterima, Pj adalah
harga tiap share dari saham j dan B adalah jumlah uang yang dianggarkan untuk
portofolio.
Untuk memilih nilai L yang sesuai agar tercapai keseimbangan terbaok antara
( )
xR dan V
( )
x relatif sulit. Jadi daripada berhenti dengan satu pilihan nilai L, pendekatan pemrograman nonlinier parametric biasa digunakan untuk membangkitkansolusi optimal sebagai fungsi L pada kisaran nilai L yang lebar. Langkah selanjutnya
adalah mengevaluasi R
( )
x dan V( )
x untuk solusi optimal tersebut dan memilih solusi yang memberikan keseimbangan antara dua nilai itu. Prosedur ini sering disebutpembangkitan solusi pada batas efisien dari grafik dua dimensi titik-titik
( ) ( )
, }{R x V x untuk nilai x yang layak. Alasannya adalah titik {R
( ) ( )
x ,V x} yang optimal untuk x (pada beberapa nilai L) pasti terletak pada batas daerah layak setiapnilai optimal x disebut efisien karena tidak ada solusi layak lain yang
sekurang-kurangnya memiliki satu nilai ukuran yang sama R atau V dan lebih baik pada
2.2.2 Masalah Transportasi dengan Diskon Volume pada Biaya Pengiriman Barang
Jenis aplikasi dari masalah transportasi dengan volume pada biaya pengiriman
barang adalah menentukan rencana yang optimal untuk mengirimkan barang dari
berbagai sumber ke berbagai tempat tujuan pengiriman, dengan kendala sumber dan
permintaan, dengan tujuan untuk meminimalkan total biaya pengiriman. Kita
asumsikan biaya pengiriman per unit dari sumber tertentu ke tujuan pengiriman adalah
tetap, tanpa memperhatikan jumlah pengiriman. Pada kenyataannya, biaya ini
mungkin tidak tetap. Diskon volume kadang tersedia untuk pengiriman dalam jumlah
yang besar sehingga biaya marginal pengiriman satu atau lebih unit mungkin akan
mengikuti pola bila jumlah pengiriman besar maka biaya marginal juga akan semakin
besar begitu juga sebaliknya.
Dengan demikian hasilnya adalah biaya yang terjadi dari pengiriman x unit
diberikan dalam bentuk fungsi nonlinier C
( )
x , yang merupakan fungsi poongan linier sama dengan biaya marginal.. konsekuensinya, jika setiap kombinasi dari sumber dantujuan memiliki fungsi biaya pengiriman yang sama maka biaya pengiriman xij unit
dari sumber i=1=(1,2,...,m) ke tujuan j=1=(1,2,...,n) dinyatakan dengan funsi nonlinier )Cij(xij sehingga keseluruhan fungsi tujuan diminimalkan adalah
( )
∑∑
= =
= m
i n
j
ij ij x
C x
f
1 1
) (
Meskipun dengan funsi tujuan yang nonlinier, kendala dari permasalahan ini
adalah kendala linier khusus yang sesuai dengan model permasalahan tranportasi.
Dari contoh-contoh kasus diatas maka dapat kita tuliskan bentuk standard dari
pemrograman kuadratis yaitu
Minimumkan :
( )
i jn
i n
j ij n
j j
jx q x x
c x
f
∑
∑∑
= =
=
+ =
1 1
1 2
Dengan menggunakan notasi matriks maka persamaan diatas dapat
disederhanakan menjadi
Minimumkan : f
( )
x cx xTQx2 1
+ =
Dengan kendala: Ax≤b dan x≥0
Dimana:
nxn
Q∈ℜ = matriks simetris (nxn) yang dikenal juga dengan matriks Hessian
mxn
A∈ℜ = matriks kendala
n
x∈ℜ = vektor kolom dari variabel keputusan n
c∈ℜ = vector baris dari fungsi tujuan
m
b∈ℜ = vector kolom dari kendala bagian kanan
T = transposisi matriks
Adanya faktor 2 1
pada fungsi tujuan merupakan konstanta qij (elemen dari
Q) dimana qij =qji. Maka setelah melakukan perkalian matriks dan vektor maka
fungsi tujuannya dinyatakan dalam qij, cj(elemen c) dan untuk tiap suku dengan
j
i= dalam penjumlahan ganda xixj = x2j sehingga - 2 1
ij
q merupakan koefisien dari
2
j
x . Ketika i≠ j maka −
(
qijxixj +qijxjxi)
2 1
, sehingga −qij adalah koefisien total
untuk perkalian xi dan xj.
Beberapa algoritma telah dikembangkan untuk khasus pemrograman kuadratis
dengan funsi tujuan merupakan fungsi konkaf. Satu cara untuk membuktikan bahwa
fungsi tujuan merupakan fungsi konkaf adalah dengan membuktikan kondisi yang
sepadan dengan xTQx≥0. Untuk semua x yaitu Q merupakan matriks definite
positif. Penyelesaian dari masalah pemrograman kuadratis ini dapat dilakukan dengan
pendekatan kondisi persyaratan Karush Kuhn Tucker kemudian dinyatakan ulang
dalam bentuk yang mirip dengan program linier, sehingga mempermudah mencari
2.3 Konveksitas Fungsi
Konsep konveksitas sering digunakan dalam bidang penelitian operasianal,
terutama dalam ruang lingkup pemrograman nonlinier. Konsep fungsi konveks
berhubungan langsung dengan himpunan konveks. Jadi, jika f
(
x1,x2,...,xn)
adalah fungsi konveks maka kumpulan titik-titik yang terletak diatas atau pada grafik(
x x xn)
f 1, 2,..., membentuk himpunan konveks. Hal yang sama, kumpulan titik yang
terletak di bawah atau pada grafik fungsi konkaf adalah himpunan konveks.
Himpunan konveks mempunyai sifat penting yaitu untuk beberapa himpunan
konveks, kumpulan titik yang berada dalam semua himpunan (irisan dari himpunan
konveks) juga merupakan himpunan konveks. Dengan demikian, kumpulan titik yang
terletak di atas atau pada fungsi konveks dan di bawah atau pada fungsi konkaf adalah
merupakan himpunan konveks juga. Jadi, himpunan konveks dapat dilihat secara
intuitif sebagai kumpulan titik dengan batas atas fungsi konveks dan batas bawah
fungsi konkaf.
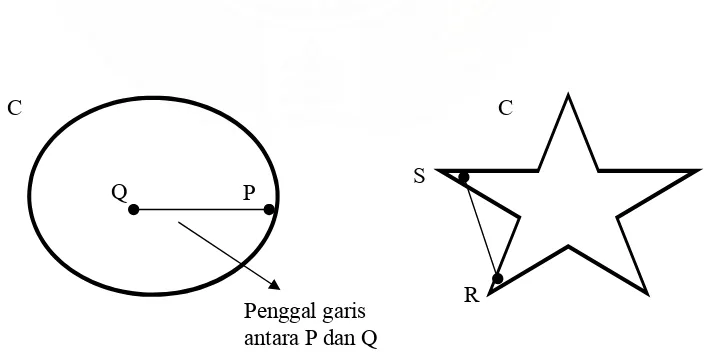
Sebuah himpuan vektor berdimensi-m adalah konveks jika untuk dua vektor
yang termasuk dalam himpunan ini berlaku bahwa penggal garis (line segment) antara
kedua vektor juga termasuk dalam himpunan ini.
Gambar 1.1 Bentuk Himpunan Konveks dan Bukan Konveks
Q P
R S
Penggal garis antara P dan Q
2.3.1 Fungsi Konveks atau Konkaf Satu Variabel Definisi :
Fungsi satu variabel f
( )
x disebut fungsi konveks jika setiap pasangan nilai x, katakanlah x′ dan x′′(
x′<x′′)
, f[
λx′′+(1−λ)x′]
≤λf(x′′)+(1−λ)f(x′) untuk semua nilai λ yang memenuhi 0<λ <1. Fungsi tersebut merupakan fungsi konveks ketat jika ≤ dapat diganti < dan merupakan fungsi konkaf (fungsi konkaf ketat) jika pernyataan ≤ diganti dengan ≥ (atau dengan >).( )
xf bersifat konveks jika untuk setiap pasang titik pada grafik f
( )
x , segmen garis yang menghubungkan kedua titik ini terletak pada ataupun diatas grafik f( )
xdan begitu juga sebaliknya untuk fungsi konkaf. Tepatnya jika memeiliki turunan
kedua, maka f
( )
x bersifat konveks jika dan hanya jika 2( )
/ 2 >0dx x f
d untuk setiap
nilai x yang mungkin.
Uji konveksitas untuk fungsi satu variabel :
Pertimbangkan fungsi satu variabel f
( )
x yang memeiliki turunan kedua untuk setiap nilai x yang mungkin. Dengan demikian, fungsi f( )
x dapat bersifat:1. Konveks jika dan hanya jika
( )
2 02 ≥ dx
x f d
untuk setiap nilai x yang mungkin.
2. Konveks ketat jika dan hanya jika
( )
2 02 > dx
x f d
untuk setiap nilai x yang mungkin.
3. Konkaf jika dan hanya jika 2
( )
02 ≤ dx
x f d
untuk setiap nilai x yang mungkin.
4. Konkaf ketat jika dan hanya jika
( )
2 02 < dx
x f d
untuk setiap nilai x yang mungkin.
2.3.2 Fungsi Konveks dan Konkaf untuk Beberapa Variabel
Konsep fungsi konveks dan konkaf dari satu variabel dapat digeneralisasikan
untuk fungsi dengan lebih dari satu variabel. Dengan demikian, saat f
( )
x digantikan dengan fungsi f(
x1,x2,...,xn)
definisi masih diterapkan apabila x digantikan olehsetelah generalisasi konsep titik dan segmen garis. Jadi, sama dengan nilai
( )
x,ytertentu ditafsirkan sebagai sebuah titik dalam ruang dua dimensi. Setiap
kemungkinan nilai dari
(
x1,x2,...,xn)
dapat diartikan sebagai titik dalam ruang−
m dimensi (ruang Euclide).
Misalakan m=n+1, titik pada grafik f
(
x1,x2,...,xn)
menjadi nilai yang mungkin dari titik[
x1,x2,...,xn, f(
x1,x2,...,xn)
]
. Kemudian,(
x1,x2,...,xn,xn+1)
dikatakan terletak di atas, tepat, atau di bawah grafik f
(
x1,x2,...,xn)
tergantung padanilai xn+1 yang lebih besar, sama dengan atau lebih kecil daripada f
(
x1,x2,...,xmn)
.Definisi :
Segmen garis yang menghubungkan kedua titik
(
x1′,x′2,...,xm′)
dan(
x1′′,x2′′,...,xm′′)
merupakan penjumlahan titik-titik
(
x1,x2,...,xm)
= [λx1′′+(1−λ)x1′,λx2′′+(1−λ)x′2,...,λxm′′ +(1−λ)x′m]dengan 0≤λ≤1. Jadi segmen garis dalam ruang m−dimensi merupakan generalisasi langsung dari segmen garis dalam ruang dua dimensi.
Definisi :
(
x x xn)
f 1, 2,..., merupakan fungsi konveks jika untuk setiap pasang titik pada grafik
(
x x xn)
f 1, 2,..., , segmen garis yang menghubungkan kedua titik tersebut seluruhnya
terletak di atas atau tepat pada grafik fungsi f
(
x1,x2,...,xn)
. Fungsi tersebut merupakan fungsi konveks ketat jika segmen garis tersebut seluruhnya terletak diatasgrafik kecuali pada kedua titik akhirnya. Begitu juga sebaliknya untuk fungsi konkaf
dan fungsi konkaf ketat.
Turunan parsial kedua dapat digunakan untuk menguji fungsi banyak variabel
konveks atau tidak, meskipun dengan cara yang lebih kompleks. Misalnya, jika
terdapat dua variabel dan semua turunan parsial ada di semua tempat, uji konveksitas
menilai tiga kuantitas memenuhi pertidaksamaan yang sesuai untuk semua nilai
Tabel 1.1 Uji Konveksitas untuk Fungsi Dua Variabel
Kuantitas Konveks Konveks
Ketat Konkaf Kankaf Ketat ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − 2 2 2 1 2 1 2 2 2 2 1 2 2 1 2 1
2 ( , ) ( , ) ( , )
dx dx x x f d dx x x f d dx x x f d 2 1 2 1 2 ) , ( dx x x f d 2 2 2 1 2 ) , ( dx x x f d 0 ≥ 0 ≥ 0 ≥ 0 > 0 > 0 > 0 ≥ 0 ≤ 0 ≤ 0 > 0 < 0 <
(
x x xn)
f 1, 2,..., adalah konveks jika dan hanya jika matriks Hessian
nya n
n× − positif definite untuk semua nilai
(
x1,x2,...,xn)
yang mungkin. Uji konveksitas selalu diperlukan sebagai sifat umum fungsi. Akan tetapi, beberapa fungsinonkonveks memenuhi syarat konveksitas pada interval tertentu dari variabel. Dengan
demikian, penting untuk membicarakan fungsi yang menjadi konveks pada daerah
tertentu.
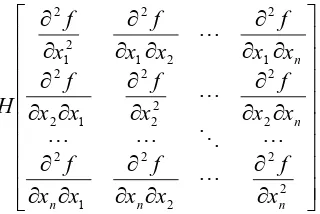
2.4 Matriks Hessian
Matrik Hessian adalah matrik yang setiap elemennya dibentuk dari turunan
parsial kedua dari suatu fungsi. Milsalkan f(x) fungsi dengan n variabel yang memiliki
turunan parsial kedua dan turunan-turunannya kontinu, Matriks Hessian dari f(x)
ditulis H adalah
Matrik Hessian dapat digunakan untuk melakukan uji turuanan kedua fungsi
lebih dari satu variabel, yaitu untuk mengidentifikasi optimum relatif dari nilai fungsi
tersebut. Penggolongan titik stasioner fungsi dua variabel dengan menggunakan
Matriks Hessian misalkan f(x)= F(x1,...,xn) adalah fungsi bernilai real
dimana semua turunan parsialnya kontinu. Misalkan x0 adalah titik stasioner dari F
dan kita definisikan H = H(x0) dengan persamaan
) (x0 F H
j iy
x
ij = dimana H(xt) adalah Hessian dari F pada x0
Titik stasioner dapat digolongkan sebagai berikut :
1. x0 adalah suatu minimum relatif dari F jika H (x ) 0 definite positif
2. x0 adalah suatu maksimum relatif dari F jika H (x ) 0 definite negatif
3. x0 adalah suatu titik pelana dari F jika H (x ) 0 indefinite
Teorema 2.2 :
Misalkan nilai eigen dari matriks Hnxn adalah 1, 2 , 3, …, n yang didefinisikan oleh
0
=
−H
I
λ dengan I adalah matriks identitas ukuran nxn. Maka :
(i) H adalah definite negatif jika dan hanya jika nilai eigen dari matriks H yaitu 1, 2 , 3, …, n kesemuanya bertanda negatif.
(ii) H adalah definite positif jika dan hanya jika nilai eigen dari matriks H yaitu 1, 2 , 3, …, n kesemuanya bertanda positif.
(iii) H adalah Semi definite negatif jika dan hanya jika nilai eigen dari matriks H yaitu
i ≤ 0, i = 1, 2, 3, …, n
(iv) H adalah Semi definite positif jika dan hanya jika nilai eigen dari matriks H yaitu
i ≥ 0, i = 1, 2, 3, …, n
Contoh :
6 4 2 )
,
(x1 x2 =x13+x23+ x12+ x22+ f
(
3 4)
0 43 12 1 1 1
1 = + = + = ∂ ∂ x x x x x f
(
3 8)
0 83 22 2 2 2
2 = + = + = ∂ ∂ x x x x x f
Persamaan di atas dipenuhi oleh titik-titik(0, 0); (0, –8/3); (–4/3, 0); dan (–4/3, –8/3)
Untuk mengetahui titik yang mana yang maximum dan yang mana yang minimum,
harus diselidiki matrik Hessiannya. Derivasi kedua dari f adalah:
, 4 6 1 2 1 2 + = ∂ ∂ x x f , 8 6 2 2 2 2 + = ∂ ∂ x x f
dan 0
2 1 2 = ∂ ∂ x x f
Jadi matrik Hessiannya menjadi
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + = 8 6 0 0 4 6 2 1 x x
H sehingga H1=
[
6x1+4]
dan ⎥⎦ ⎤ ⎢ ⎣ ⎡ + + = 8 6 0 0 4 6 2 1 2 x x H
Nilai matrik Hessian untuk masing-masing titik ekstrem disajikan di bawah ini.
(
x1,x2)
Matriks H H1 H2 Sifat H Sifat(
x1,x2)
f(
x1,x2)
( )
0,0 ⎥⎦ ⎤ ⎢ ⎣ ⎡ 8 0 0 4 4
+ +32 Definite
positif Minimum 6
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − 3 8 , 0 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −8 0 0 4 4
+ −32 Tak tentu Titik belok
27 418 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛− ,0
3 4 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡− 8 0 0 4 4
− −32 Tak tentu Titik belok
27 194 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛− − 3 8 , 3 4 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − 8 0 0 4 4
− +32 Definite
negatif Maksimum 3
[image:31.612.130.512.331.713.2]50
2.5 Matriks Definite Positif
Bentuk kuadrat pada
(
x1,x2,...,xn)
adalah ekspresi yang dapat kita tulissebagai
[
]
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ n n x x x A x x x M 2 1 2
1, ,..., . . . Dengan A adalah matriks simetrik nxn. Jadi misalkan
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n x x x X M 2 1
maka bentuk ini dapat ditulis sebagai XtAX
Definisi
Bentuk kuadrat XtAX disebut definite positif jika XtAX > 0 untuk semua x ≠ 0,
sedangkan matriks simetrik A kita sebut matriks definit positif jika XtAX adalah
bentuk kuadrat definit positif.
Contoh :
Dipunyai matriks simetrik berikut :
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = 2 1 0 1 2 1 0 1 2 a
Untuk mengkaji apakah matriks A bersifat definte positif, maka:
[
x1 x2 x3]
AX
Xt =
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − 2 1 0 1 2 1 0 1 2 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 3 2 1 x x x
=
[
x1 x2 x3]
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + − − 3 2 3 2 2 2 1 2 2 2 x x x x x x x ) x 2 x ( x ) x x 2 x ( x ) x x 2 (
x1 1− 2 + 2 − 1+ 2 − 3 + 3 − 2 + 3
= 2 3 3 2 3 2 2 2 2 1 2 1 2
1 x x x x 2 x x x x 2
2x − − + x − − + x
= 2 3 3 2 2 2 2 1 2
1 2x x 2 2x x 2
2x − + x − + x
= x12 +(x12−2x1x2+x22)+(x22 −2x2x3 +x32)+x32 2 3 2 3 2 2 2 1 2
1 (x x ) (x x ) x
x + − + − +
=
Dari sini dapat disimpulkan bahwa matrik A bersifat definit positif karena memenuhi:
0 )
( )
( 1 2 2 2 3 2 32
2
1 + x −x + x −x +x >
x kecuali jika x1 = x2 = x3 =0
Sebaliknya matrik A dan bentuk kuadrat XtAXdisebut :
1. Definite negatif jika XtAX< 0 , untuk semua x ≠ 0 .
2. Semidefinite positif jika XtAX ≥0 , untuk semua x.
3. Semidefinite negatif jika XtAX≤0 , untuk semua x.
4. Indefinite bila tidak termasuk golongan diatas.
Himpunan syarat perlu dan syarat cukup untuk bentuk-bentuk definit positif
dan negatif. yaitu :
1. Syarat perlu dan syarat cukup untuk bentuk definite positif.
Suatu himpunan syarat perlu dan syarat cukup bentuk XtAX sebagai definite
positif adalah
0
11 >
h , 0
22 21 12 11 > h h h h
, 0
33 32 31 23 22 21 13 12 11 > h h h h h h h h h
, . . . , A >0
Jika n minor dari A adalah positif, maka XtAX adalah definite positif. DanXtAXhanya definite positif, jika minor-minor ini positif.
2. Syarat perlu dan syarat cukup untuk bentuk definite negatif
Suatu himpunan syarat perlu dan syarat cukup bentuk XtAX menjadi definite
negatif atau setaranya untuk Xt(−A)X sebagai definite positif adalah
0
11 <
h , 0
22 21 12 11 > h h h h
, 0
33 32 31 23 22 21 13 12 11 < h h h h h h h h h
, . . . , (−1)n A >0
2.6 Persyaratan Karush Khun Tucker
Pada tahun 1951 Kuhn Tucker mengemukakan suatu teknik optimisasi yang
dapat digunakan untuk pencarian titik optimum dari suatu fungsi yang berkendala.
Metode Karush Kuhn Tucker ini dapat dipergunakan untuk mencari solusi yang
optimum dari suatu fungsi tanpa memandang sifat dari fungsi tersebut apakah linier
atau nonlinier. Jadi metode Kuhn Tucker ini bersifat teknik yang umum dalam
pencarian titik optimum dari setiap fungsi. Metode Karush Kuhn Tucker dapat
digunakan untuk memecahkan persoalan baik yang nonlinier maupun yang linier.
Jika kita menghadapi masalah optimasi dalam bentuk :
Maksimumkan / minimumkan : Z = f
( )
X dengan X ={x1,x2,...,xn}t Dengan kendala : gi( )
X ≤/≥0 dengan i= 1,2,3,…,mX ≥0
m≤n (jumlah kendala lebih kecil dari variabel)
Pertama tuliskan kembali persyaratan-persyaratan yang tak negative seperti
0 ,...,
0 ,
0 2
1 ≤ − ≤ − ≤
−x x xn , sehingga himpunan kendalanya adalah m+n persyaratan
ketidaksamaan yang masing-masing dengan tanda lebih kecil dari pada atau sama
dengan. Kemudian tambahkan variabel-variabel kurang xn2+1,xn2+2,...,x22n+m
berturut-turut pada ruas kiri dari kendala-kendala tadi, yang dengan demikian merubah
tiap-tiap ketidaksamaan menjadi suatu kesamaan. Variabel-variabel kendur (slack
variables) yang ditambahkan disini berbentuk suku-suku kuadrat untuk menjamin
bahwa mereka tak negatif. Kemudian bentuk fungsi Lagrange :
( )
[
( )
]
[
2]
11 1
2
i n i n m
m i m
i
i n i
i g X x x x
X f
L +
+
+ =
= +
+ − −
− −
≡
∑
λ∑
λ0 = ∂ ∂ i x
L
(
)
m n i=1,2,...,2 +
0 = ∂ ∂ i L
λ
(
i=1,2,...,m+n)
0
≥
i
λ
(
i=1,2,...,m+n)
Untuk fungsi konveks, syarat perlu dan cukup untuk mencapai titik minimum
dapat dicari menggunakan syarat Karush Kuhn Tucker. Tetapi untuk fungsi
nonkonvek, syarat Karush Kuhn Tucker merupakan syarat perlu saja, tetapi belum
cukup untuk mencapai optimal. Jadi untuk masalah jenis konveks, syarat Karush
Kuhn Tucker menjadi syarat perlu dan cukup untuk sebuah minimum/maksimum
global.
Teorema 1 (Frederick S. Hillier dan Gerald J. Lieberman, 1994)
Misalkan f(x,y) merupakan fungsi 2 variabel. f(x,y) merupakan fungsi konveks jika
dan hanya jika dipenuhi ketiga syarat berikut :
(i) 2 2 2 2 1 2 1 2 2 2 2 1 2 2 1 2 1 2 ) , ( ) , ( . ) , ( ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = dx dx x x f d dx x x f d dx x x f d
(ii) ( 2, ) 0
1 2 1 2 ≥ dx x x f d
(iii) ( 2, ) 0
2 2 1 2 ≥ dx x x f d
Teorema 2 (Frederick S. Hillier dan Gerald J. Lieberman, 1994)
Suatu fungsi 2 variabel f(x,y) merupakan fungsi konkaf jika tidak memenuhi paling
tidak satu dari ketiga syarat pada teorema 1, atau dengan kata lain f(x,y) merupakan
fungsi konveks.
Teorema 3 (Frederick S. Hillier dan Gerald J. Lieberman, 1994)
Untuk permasalahan dengan asumsi f(x) konkaf dan gj(x) konveks, maka syarat perlu
dan cukup keoptimalannya berdasarkan teorema berikut. Misalkan
) ( ),..., ( ), ( ),
(x g1 x g2 x g x
) ,..., , ( 1 2
*
n
x x x
x = ′ ′ ′ merupakan penyelesaian optimal untuk masalah program nonlinier
apabila terdapat sejumlah λi untuk i=1,2,...,m sehingga semua syarat terpenuhi :
(i) 0
1 = ∂ ∂ + ∂ ∂
∑
= i j m j i i x g x f λi=1,2,...,n
(ii) 0λjgj = j=1,2,...,m
(iii) gj ≤0 j=1,2,...,m
(iv) λj ≥0 j=1,2,...,m
Syarat Karush Kuhn Tucker untuk program nonlinier berkendala :
Teorema
Diasumsikan )f(x),g1(x),g2(x),...,gm(x merupkan fungsi yang dapat diturukan
maka * ( 1, 2,..., ) n
x x x
x = ′ ′ ′ menjadi solusi optimal untuk permasalahan pemrograman
nonlinier hanya jika terdapat sejumlah m bilangan μ1,μ2,...,μm sehingga semua syarat kondisi Karush Kuhn Tucker berikut ini terpenuhi :
(i) 0
1 ≤ ∂ ∂ − ∂ ∂
∑
= j m i i j x g x fλ pada x=x* untuk j=1,2,...,n
(ii) 0
1 = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ − ∂ ∂
∑
= j m i i j j x g x fx λ pada x=x* untuk j=1,2,...,n
(iii) 0gi(x*)−bi ≤ untuk j=1,2,...,m
(iv)
[
( *)−]
=0 i ii g x b
λ untuk j=1,2,...,m
(v) x*j ≥0 untuk j=1,2,...,m
(vi) 0λj ≥ untuk j=1,2,...,m
Dapat dilihat darik kondisi (ii) dan (iv) memerlukan hasil perkalian dua
kuantitas sama dengn nol. Oleh karena itu, tiap kondisi ini menyatakan bahwa
setidaknya salah satu dari kuantitas itu harus sama dengan nol. Akibatnya, kondisi (iv)
dapat digabung dengan kondisi (iii) untuk menyatakan mereka dalam bentuk lain
sebagai berikut.:
0 )
( * − i = i x b
Demikian pula kondisi (ii) dapat digabung dengan kondisi (i) menjadi :
0
1
= ∂ ∂ − ∂
∂
∑
= j
i m
i i
j x
g x
f λ
(atau 0≤ jika x*j =0) untuk j=1,2,...,m
Ketika m=0 (tidak ada kendala yang berbentuk fungsi), jumlahan berbilai 0
dan fungsi gabungan (i,ii) menjadi kondisi yang ada. Oleh karena itu, untuk m>0, tiap
suku dalam jumlahan mengubah kondisi untuk m=0 dengan memasukkan pengaruh
dari kendala berbentuk fungsi yang bersangkutan.
Dalam kondisi diatas, μi setara dengan variabel dual dalam pemrogramana linier dan memiliki interpretasi ekonomi yang juga dapat diperbandingkan. Akan
tetapi, μi juga ada dalam penurunan matematika seperti dalam faktor pengali Lagrange. Pada kondisi (iii) dan (v) hanya melakukan penegasan kelayakan dari
solusi. Kondisi yang lainnya menghilangkan sebagian besar solusi layak lainnya
menjadi kandidat yang mungkin untuk menjadi solusi optimal.
Corollary
Diasumsikan bahwa f
( )
x merupakan fungsi konkaf dan g1(x),g2(x),...,gm(x) merupakan fungsi konveks (misalakan saja masalah ini merupakan masalahpemrograman konveks), dengan semua fungsi ini memenuhi kondisi biasa. Lalu
) ,..., ,
( *1 *2 * *
n
x x x
x = adalah solusi optimal jika dan hanya jika semua kondisi teorema
terpenuhi.
2.7 Masalah Komplementaritas
Saat kita berhadapan dengan pemrograman kuadratis, maka kita harus
mengetahui terlebih dahulu bagaimana menyelesaikan permasalahan pemrograman
nonlinier tertentu dapat direduksi menjadi memecahkan masalah komplementaritas.
Dengan variabel w1,w2,...,wp dan z1,z2,...,zp , masalah komplementaritas bertujuan
menemukan solusi layak untuk kendala
) (z F
Yang juga memenuhi kendala komplementaritas
0
=
z wT
Disini, w dan z adalah vektor kolom. F adalah fungsi bernilai vektor yang diketahui,
dan T menandakan transpose matriks. Masalah ini tidak memiliki fungsi tujuan,
sehingga secara teknis bukanlah murni masalah pemrograman nonlinier. Hal ini
disebut masalah komplementaritas karena hubungan komplementernya.
0
=
w atau zi =0 (atau kedua-duanya) untuk i=1,2,...,p
Suatu kasus khusus yang penting yaitu masalh komplementaritas linier dengan
Mz q z
F( )= +
Dengan q merupakan vektor kolom yang diketahui dan M adalah matriks pxpyang
diketahui. Algoritma yang efisien telah dikembangkan untuk pemecahan masalah ini
dengan asumsi tertentu tentang sifat matriks M. satu jenis algoritma menggunakan
pemutaran (pivoting) dari satu solusi BF (Basic Feasible) kesolusi BF selanjutnya,
seperti metode simpleks dalam pemrograman linier.
Masalah komplementaritas ini memiliki aplikasi dalam teori permainan,
masalah keseimbangan ekonomi, dan masalah keseimbangan teknik sebagai tambahan
BAB 3
PEMBAHASAN
Dalam masalah optimasi terdapat dua bentuk optimasi yaitu, optimasi fungsi
tak bersyarat dan optimasi fungsi bersyarat. Kita sudah mengenal beberapa cara untuk
menyelesaikan bentuk yang pertama seperti uji turunan pertama, uji turunan kedua,
untuk fungsi satu variabel, serta uji parsial kedua untuk fungsi dua variabel, semuanya
telah diuraikan pada bab sebelumya. Sedangkan untuk jenis yang kedua merupakan
jenis yang paling banyak kita jumpai dalam kehidupan nyata. Banyak aplikasi dari
pemodelan matematika dalam optimasi fungsi yang mensyaratkan beberapa kondisi
atau syarat untuk diperoleh suatu solusi optimal. Syarat ini yang mengoptimumkan
fungsi tujuan. Persoalan dengan model tersebut dinamakan optimasi bersyarat. Bentuk
umum dari optimasi fungsi dengan kendala adalah tentukan nilai dari variabel
keputusan (nilai ekstrim) x=
(
x1,x2,...,xn)
yang memaksimumkan (meminimumkan) fungsi dari permasalahan:Maksimumkan / minimumkan : Z = f
( )
X Dengan kendala : g1( )
X (≤/ ≥)b1. . .
gi
( )
X (≤/≥)bi dengan i= 1,2,3,…,m Dimana f(X) merupakan fungsi tujuan (objective function), dan gi( )
X (≤ ,=,≥)bimerupakan fungsi kendala.
3.1 Pemrograman Kuadratis Tak Berkendala
Contoh :
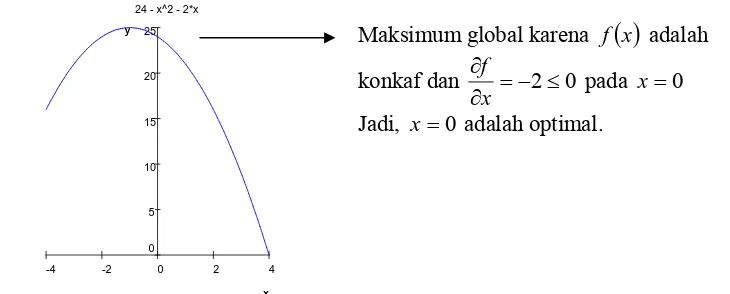
Maksimalkan f
( )
x =24−2x−x24 2 0 -2 -4
25
20
15
10
5
0
x y
x y
[image:40.612.129.494.84.231.2]24 - x^2 - 2*x
Gambar 1.3 Contoh yang mengambarkan solusi optimal dapat terletak pada titik
dengan nilai turunan negatif, bukan nol, karena titik tersebut terletak pada batas
kendala nonnegativitas.
Solusi optimal untuk suatu masalah dengan satu variabel terletak pada x=0
meskipun turunannya bernilai negatif. Oleh karena itu setiap permasalahan yang
memiliki fungsi konkaf untuk dimaksimalkan pada kendala nonnegativitas,
mempunyai turunan yang kurang dari satu atau sama dengan nol untuk x=0 adalah
kondisi yang diperlukan dan cukup untuk x=0 menjadi optimal.
3.2 Pemrograman Kuadratis Berkendala Modifikasi Simpleks
Contoh :
Maksimalkan : f(x1,x2)=15x1+30x2+4x1x2 −2x12 −4x22
Dengan kendala : x1+2x2 ≤30 0
1≥ x
0
2 ≥ x
Penyelesaian :
Dalam kasus ini diperoleh
[
15 30]
=
c ⎥
⎦ ⎤ ⎢ ⎣ ⎡ =
2 1
x x
x ⎥
⎦ ⎤ ⎢
⎣ ⎡ −
− =
8 4
4 4
Q
Maksimum global karena f
( )
x adalah konkaf dan =−2≤0∂ ∂
x f
pada x=0
[
1 2]
=
A b=
[ ]
30Catat bahwa :
=
Qx
xT
[
x1 x2]
⎥⎦ ⎤ ⎢
⎣ ⎡ −
−
8 4
4 4
⎥ ⎦ ⎤ ⎢ ⎣ ⎡
2 1
x x
= [
(
4x1−4x1)
(
−4x1+8x2)
] ⎥⎦ ⎤ ⎢ ⎣ ⎡
2 1
x x
= 2
21 2 1 2 1 2
1 4 4 8
4x − xx − x x + x
= q11x12 −q21x1x2 −q12x1x2 +q22x212
Mengalikan dengan 2 1
− mengghasilkan
2 2 2 1 2
1 4 4
2 2
1
x x x x Qx
xT =− + −
−
Yang merupakan bagian nonlinier dari fungsi tujuan untuk contoh ini. Oleh karena
4
11 =
q dan q22 =8 ini menggambarkan bahwa qjj
2 1
− merupakan koefisien darix2j
dalam fungsi tujuan. Fakta bahwa q12 =q21 =−4 menggambarkan bahwa baik −qij
maupun −qji adalah koefisien total untuk perkalian xi dan xj.
Kondisi KKT untuk Pemrograman Kuadratis
Untuk konkritnya, kita mulai dengan membentuk kondisi Karush Kuhn Tucker adalah
sebagai berikut :
1. )(j=1 . 15+4x2−4x1−μ1 ≤0 2. )(j=1 . 0xj(15+4x2 −4x1−μ1)= 1. (j=2). 030+4x1−8x2 −2μ1≤ 2. (j=2). x2(30+4x1−8x2−2μ1)=0 3. x1+2x2 −30≤0
4. μ1(x1+2x2−30)=0 5. 0x1≥ , x2 ≥0
Untuk mulai menyatakan ulang kondisi ini di dalam bentuk yang lebih tepat,
kita memindahkan konstanta dalam kondisi 1(j=1),1(j=2), dan 3 ke sisi sebelah kanan dan lalu menambahkan slack variabel nonnegatif yang dilambangkan dengan
1 2 1,y ,v
y untuk mengubah pertidaksamaan menjadi persamaan.
1. (j=1). −4x1+4x2 −μ1+y1=−15 1. )(j=2 . −4x1−8x2 −2μ1+y2 =−30 3. x1+2x2+v1 =30
Perhatikan bahwa kondisi 2(j=1)sekarang dapat dinyatakan ulang secara sederhana, yaitu memerlukan syarat x1 =0atau y1 =0, yaitu
2(j=1).x1y1 =0
Dengan cara yang sama, kondisi 2(j=2) dan 4 dapat digantikan dengan 2(j=2). x2y2 =0
4. μ1v1 =0
Untuk setiap dari tiga pasang variabel ini (x1.y1),(x2.y2),(μ1,v1) dua variabel tersebut disebut variabel komplementer,karena hanya satu dari dua variabel ini yang
dapat bernilai selain nol. Bentuk baru kondisi 2(j=1),2(j=2),dan 4 ini dapat digabung menjadi satu kendala yaitu :
1 1y
x + x2y2 + μ1v1 = 0
Yang disebut kendala komplementaritas.
Setelah mengalikan dengan -1 persamaan untuk kondisi 1(j=1) dan 1(j=2)
untuk mendapat ruas kanan nonnegatif, kita sekarang memiliki bentuk yang
diinginkan untuk keseleruhan kondisi seperti yang ditunjukkan sebagai berikut.
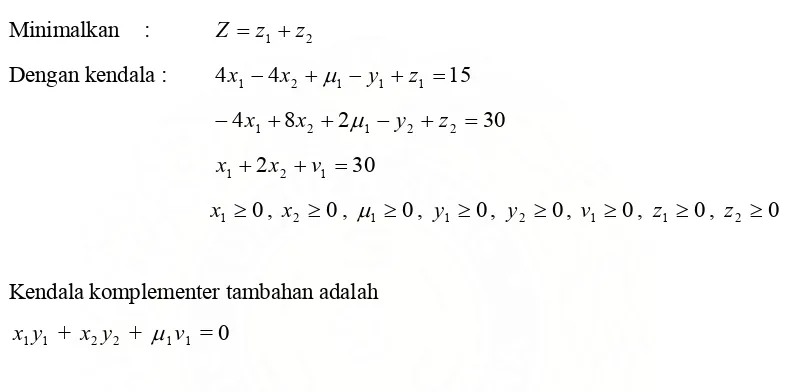
15 4
4x1− x2 +μ1−y1 =
30 2
8
4 1+ 2 + 1− 2 =
− x x μ y
30 2 2 1
1+ x +v =
x
0
1 ≥
x , x2 ≥0, μ1≥0, y1 ≥0, y2 ≥0, v1≥0
1 1y
Bentuk ini cukup baik karena, kecuali untuk kendala komplementaritas,
kondisi ini adalah kendala pemrograman linier .
Untuk setiap masalah pemrograman kuadratis, kondisi Karush Kuhn
Tucker-nya dapat direduksi menjadi bentuk inidengan haTucker-nya mengandung kendala
pemrograman linier ditambah satu kendala komplentaritas. Dalam notasi matriks
dapat dituliskan bentuk umumnya adalah
T T
c y u A
Qx+ − =
b v
Ax+ =
0
≥
x , u ≥0, y≥0, v≥0 0
= +u v y
xT T
Dengan element vektor u adalah ui dari bagian sebelumnnya dan
elemen-elemen vektor kolom y dan v adalah slack variabel. Oleh karena fungsi tujuan
masalah asli diasumsikan konkaf dan fungsi kendalanya linier sehingga konveks maka
corollary teorema pada kondisi Karush Kuhn Tucker dapat digunakan. Oleh karena
itu, x optimal jika dan hanya jika y, danu v memiliki nilai sehingga semua empat
vektor memenuhi kondisi di atas. Masalah asli tereduksi menjadi masalah untuk
mencari solusi layak untuk kendala ini.
Metode Modifikasi Simpleks
Metode modi