Dynamic Mathematical Modeling and Simulation Study of Small Scale Autonomous Hovercraft.
Teks penuh
Gambar

Dokumen terkait
Fuzzy adaptive PID controller is applied to erection mechanism in combination of fuzzy logic and PID control method.. The model of erection mechanism is
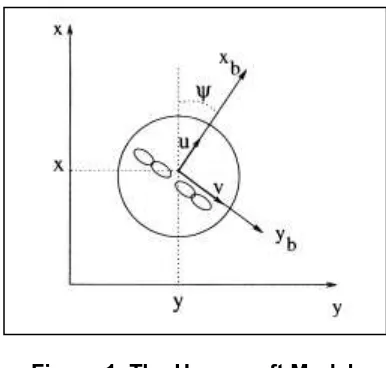
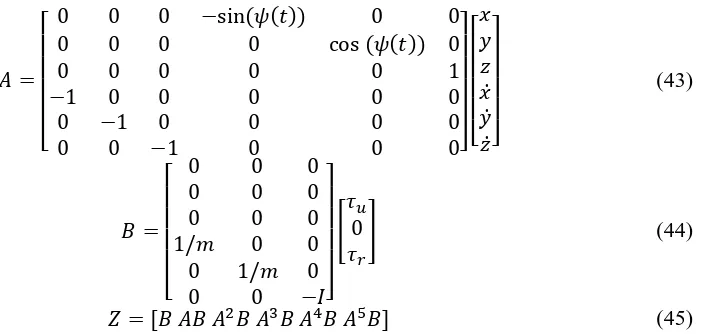
In fact, developing a mathematical modelling is important as the performance of the controller to be developed depends on how well is the mathematical model being
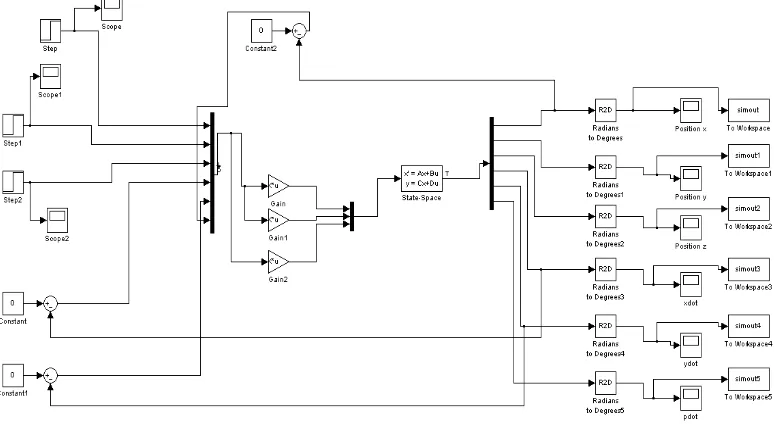
Methodology to carry out the research in Chapter 3, it is divided into several part, which are the mathematical modeling of the quadrotor system, experiment procedure
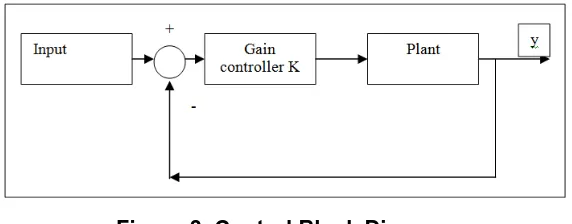
The controller is created using parameters to allow easy modification (tuning) of the operation of the controller. This controller also included the Stateflow
One is the model based controller lead/lag compensator controller and second is state.
The parameter effect of PID controller on frequency response The simulation results of shaft torque and motor torque due to unit-step command speed when the two-mass system is
Several controllers including repetitive control [5, 6], hysteresis regulation [7, 8], predictive control [9, 10] and multi- loop feedback control [11, 12], have been proposed to obtain
A novel wireless controller is designed by using three nested loops: 1 The inner loop uses voltage feedback signal to generate control signals for the inverter; 2 The middle loop
