KAJIAN STABILITAS STATIS KAPAL YANG
MENGOPERASIKAN ALAT TANGKAP DENGAN CARA
DIAM/STATIS (STATIC GEAR)
Oleh :
SUKRISNO
C54101029
PROGRAM STUDI PEMANFAATAN SUMBERDAYA PERIKANAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI
Dengan ini saya menyatakan bahwa skripsi yang berjudul :
KAJIAN STABILITAS STATIS KAPAL YANG MENGOPERASIKAN ALAT
TANGKAP DENGAN CARA DIAM/STATIS (STATIC GEAR)
adalah benar merupakan hasil karya saya sendiri dan belum pernah diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Adapun semua sumber data dan informasi yang berasal atau dikutif dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Bogor, Februari 2006
Sukrisno
ABSTRAK
SUKRISNO (C54101029). Kajian Stabilitas Statis Kapal yang Mengoperasikan Alat Tangkap dengan Cara Diam/S tatis (Static Gear). Dibimbing oleh Yopi
Novita.
Stabilitas yang tinggi merupakan salah satu faktor yang harus dimiliki oleh kapal penangkap ikan terutama untuk menunjang keberhasilan operasi penangkapan ikan. Bagi kapal-kapal yang mengoperasikan alat tangkap secara diam/statis (static gear), seperti misalnya kapal gillnet, pole and line, long line,ancing ulur dan sebagainya, stabilitas yang tinggi merupakan hal utama yang sangat diperlukan oleh kapal. Stabilitas yang tinggi terutama dibutuhkan saat kapal drifting. Hal ini dikarenakan pada saat itu kinerja kapal sangat dipengaruhi oleh faktor eksternal dalam hal ini adalah gelombang laut.
Penelitian ini bertujuan untuk menghitung dan mengkaji nilai stabilitas statis kelompok kapal yang mengoperasikan alat tangkap statis. Penelitian ini bersifat simulasi- numerik, yaitu melakukan simulasi terhadap data yang diperoleh dari studi literatur.
Dari hasil kajian mengenai stabilitas statis, kapal kelompok alat tangkap statis yang diteliti memiliki kisaran rentang stabilitas antara 9o – 36o dengan rata-rata sudut sebesar 22,92o. Nilai kisaran tersebut berada pada kondisi sebenarnya (flooding angle). Untuk bentuk kasko, nilai stabilitas yang lebih baik dimiliki oleh bentuk kasko U-bottom dan akatsuki bottom.
KAJIAN STABILITAS STATIS KAPAL YANG
MENGOPERASIKAN ALAT TANGKAP DENGAN CARA
DIAM/STATIS (STATIC GEAR)
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Perikanan pada Fakultas Perikanan dan Ilmu Kelautan
Institut Pertanian Bogor
Oleh:
SUKRISNO
C54101029
PROGRAM STUDI PEMANFAATAN SUMBERDAYA PERIKANAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Judul Skripsi : KAJIAN STABILITAS STATIS KAPAL YANG
MENGOPERASIKAN ALAT TANGKAP DENGAN CARA DIAM/STATIS (STATIC GEAR).
Nama : Sukrisno
NRP : C54101029
Disetujui, Pembimbing
Yopi Novita, S.Pi., M.Si. NIP. 132 258 291
Mengetahui,
Dekan Fakultas Perikanan dan Ilmu Kelautan
Dr. Ir. Kadarwan Soewardi NIP. 130 805 031
RIWAYAT HIDUP
Penulis dilahirkan di Brebes pada tanggal 18 Juli 1982 dari pasangan Asmuni dan Warliyah. Penulis merupakan anak keempat dari empat bersaudara.
Pendidikan penulis diawali pada tahun 1989 dengan bersekolah di Sekolah Dasar Negeri I Parereja dan lulus pada tahun 1995. Pada tahun 1998 penulis menyelesaikan pendidikan di Sekolah Lanjutan Tingkat Pertama (SLTP) Negeri 2 Banjarharjo. Pada tahun 1998 penulis melanjutkan ke Sekolah Menengah Umum (SMU) Negeri 1 Babakan kemudian pada tahun yang sama (1998), penulis pindah sekolah dari Sekolah Menengah Umum (SMU) Negeri 1 Babakan ke Sekolah Menengah Umum (SMU) Negeri 1 Banjarharjo dan lulus pada tahun 2001. Penulis diterima di Institut Pertanian Bogor melalui jalur Undangan Seleksi Masuk IPB (USMI) tahun 2001 pada Program Studi Pemanfaatan Sumberdaya Perikanan, Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan.
Selama kuliah di IPB penulis aktif mengikuti kegiatan-kegiatan yang diadakan oleh Forum Kajian Islam Mahasiswa IPB dan juga pernah mengikuti pelatihan bahasa di UPT Pelatihan Bahasa, Laboratorium Bahasa Jepang, Institut Pertanian Bogor sampai tingkat dasar dua. Penulis melakukan penelitian dan menyusun skripsi sebagai salah satu syarat untuk memperoleh gelar Sarjana Perikanan pada Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor dengan judul “Kajian Stabilitas Statis Kapal yang
PRAKATA
Skripsi yang berjudul Kajian Stabilitas Statis Kapal yang Mengoperasikan
Alat Tangkap dengan Cara Diam/Statis (Static Gear) ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana Perikanan pada Departeme n Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Skripsi ini disusun berdasarkan hasil penelitian yang telah dilakukan pada bulan Januari 2005 di Laboratorium Kapal Perikanan dan Navigasi, Dept. PSP, FPIK, IPB.
Pada kesempatan ini, penulis mengucapkan terima kasih kepada:
(1) Kedua orang tua yang telah memberikan dukungannya, baik secara moral maupun material;
(2) Yopi Novita, S.Pi., M.Si. sebagai dosen pembimbing atas arahan dan bimbingannya, sehingga skripsi ini dapat diselesaikan;
(3) Dr. Ir. Ari Purbayanto, M.Sc., Ir. Imron S.Pi. sebagai dosen penguji atas masukan dan sarannya;
(4) Ir. Tri Wiji Nurani, M.Si. sebagai komisi pendidikan atas masukan dan sarannya dalam penyempurnaan skripsi ini; dan
(5) Semua pihak yang telah membantu penulis dalam menyelesaikan penulisan skripsi ini.
Penulis menyadari bahwa skripsi ini jauh dari sempurna. Oleh karena itu, saran dan kritik yang membangun dari pembaca sangat diharapkan untuk perbaikan dan penyempurnaan tulisan ini. Semoga skripsi ini bermanfaat bagi semua pihak yang membacanya.
Bogor, Februari 2006
DAFTAR ISI
Halaman
DAFTAR TABEL...iii
DAFTAR GAMBAR ... iv
DAFTAR LAMPIRAN... ...vi
1 PENDAHULUAN 1.1 Latar Belakang...1
1.2 Tujuan Penelitian...2
1.3 Manfaat Penelitian...2
2 TINJAUAN PUSTAKA 2.1 Karakteristik Kapal Perikanan...3
2.2 Desain Kapal Perikanan...4
2.3 Stabilitas Kapal Perikanan...9
2.4 Kurva GZ ...12
3 METODOLOGI 3.1 Waktu dan Tempat Penelitian...14
3.2 Bahan dan Alat Penelitian ...14
3.3 Metode Penelitian ...14
3.3.1 Jenis Data ...14
3.3.2 Pengumpulan Data ...15
3.3.3 Pengolahan Data...15
3.3.4 Analisis Data ...15
4 HASIL DAN PEMBAHASAN 4.1 Bentuk Kasko dan Dimensi Kapal Alat Tangkap Statis ...17
4.2 Stabilitas Statis Kapal Kelompok Alat Tangkap Statis ...21
4.2.1 Stabilitas statis berdasarkan perbedaan bentuk kasko ...25
4.2.2 Stabilitas statis berdasarkan selang nilai B/D...31
4.2.3 Stabilitas statis berdasarkan ton displacement ( )...37
5 KESIMPULAN DAN SARAN 5.1 Kesimpulan...43
5.2 Saran ...43
DAFTAR PUSTAKA...44
DAFTAR TABEL
Halaman
DAFTAR GAMBAR
Halaman
1. Bentuk badan kapal flat bottom ...5
2. Bentuk badan kapal U-bottom ...5
3. Bentuk badan kapal V bottom ...6
4. Bentuk badan kapal round bottom ...6
5. Bentuk badan kapal akatsuki bottom ...6
6. Bentuk badan kapal round flat bottom ...7
7. Bentuk badan kapal hard chin bottom ...7
8. Posisi keseimbangan kapal ...11
9 Kurva stabilitas statis kapal ...12
10 Kurva stabilitas statis kapal dengan sudut keolengan yang berbeda...13
11 Tahapan pencapaian tujuan penelitian ...16
12. Bentuk kasko tipe U-bottom pada kapal alat tangkap statis...18
13. Bentuk kasko tipe round bottom pada kapal alat tangkap statis ...18
14. Bentuk kasko tipe round flat bottom pada kapal alat tangkap statil...19
15. Bentuk kasko tipe akatsuki bottom pada kapal alat tangkap statis...19
16. Kurva stabilitas statis kapal kelompok alat tangkap statis ...23
17. Nilai vanishing angle kondisiIS dan flooding angle kondisi UIS berdasarkan perbedaan bentuk kasko ...26
18. Sudut GZ maksimum kondisiIS dan UIS berdasarkan perbedaan bentuk kasko ...28
19. Nilai GZ maksimum kondisiIS dan UIS berdasarkan perbedaan bentuk badan kapal flat bottom ...29
20. Nilai GM berdasarkan perbedaan bentuk kasko ...31
B/D ...33 23. Nilai GZ maksimum kondisiIS dan UIS berdasarkan selang nilai
B/D ...35 24. Nilai GM berdasarkan selang nilai B/D ...36 25. Nilai vanishing angle kondisiIS dan flooding angle kondisi UIS
berdasarkan selang ton displacement ( )...37 26. Sudut GZ maksimum kondisiIS dan UIS berdasarkan selang ton
displacement ( ) ...39
27. Nilai GZ maksimum kondisiIS dan UIS berdasarkan selang ton
DAFTAR LAMPIRAN
Halaman
1. Ukuran dimensi utama kapal alat tangkap statis ...47
2. Nilai stabilitas statis kapal alat tangkap statis berdasarkan perbedaan bentuk kasko ...48
3. Nilai stabilitas statis kapal alat tangkap statis derdasarkan selang nilai rasio B/D ...49
4. Nilai stabilitas statis kapal alat tangkap statis derdasarkan selang nilai ton displacement ( ) ...50
5. Sudut oleng (derajat) dan lengan penegak GZ (m) kapal alat tangkap statis ...51
6. Gambar body plan kapal alat tangkap statis ...65
7. Gambar rencana garis (lines plan) kapal alat tangkap statis ...69
1 PENDAHULUAN
1.1Latar Belakang
Kapal penangkap ikan merupakan salah satu bagian dari unit penangkapan ikan. Kapal ikan mempunyai peranan penting dalam dunia perikanan yang dapat menunjang keberhasilan suatu operasi penangkapan ikan. Aktivitas yang dilakukan oleh suatu kapal penangkap ikan sangat beragam, seperti menuju ke lokasi fishing ground, mengejar gerombolan ikan dan membawa hasil tangkapan. Berbagai macam aktivitas tersebut tidak akan mampu dilakukan oleh suatu kapal ikan tanpa memiliki stabilitas yang baik. Oleh karena itu, stabilitas yang tinggi merupakan salah satu faktor yang harus dimiliki oleh kapal penangkap ikan terutama untuk menunjang keberhasilan operasi penangkapan ikan.
Bagi kapal-kapal yang mengoperasikan alat tangkap secara diam/statis (static gear), seperti misalnya kapal gillnet, pole and line, long line dan sebagainya, stabilitas yang tinggi merupakan hal utama yang sangat diperlukan oleh kapal. Stabilitas yang tinggi terutama dibutuhkan saat kapal drifting. Hal ini dikarenakan pada saat itu kinerja kapal sangat dipengaruhi oleh faktor eksternal dalam hal ini adalah gelombang laut.
stabilitas yang ditetapkan oleh IMO. Akan tetapi kriteria stabilitas yang ditetapkan oleh IMO diperuntukkan untuk kapal-kapal yang berukuran panjang diatas 24 m.
Penelitian tentang stabilitas kapal telah banyak dilakukan, diantaranya penelitian-penelitian yang dilakukan oleh Kuncoro (2000), Rasdiana (2004), Handayani (2005). Penelitian-penelitian tersebut merupakan penelitian-penelitian yang dilakukan untuk mengkaji stabilitas statis sebuah kapal. Akan tetapi penelitian tentang stabilitas statis yang saat ini dilakukan adalah terhadap stabilitas statis beberapa kapal yang mengoperasikan alat tangkap dengan cara statis/diam (static gear). Dalam pembahasan selanjutnya static gear disebut sebagai alat tangkap statis. Penelitian sejenis telah pula dilakukan oleh Widisaksono (2005), akan tetapi terhadap kapal-kapal yang mengoperasikan alat tangkap jenis encircling gear. Penelitian inipun dapat dikatakan pula sebagai penelitian lanjutan dari penelitian yang telah dilakukan oleh Rahman (2004). Dimana dalam penelitian tersebut salah satu tujuannya adalah mengkaji bentuk kasko berdasarkan metode pengoperasian alat tangkap, dan dalam penelitian ini beberapa kapal yang mengoperasikan alat tangkap statis akan dikaji stabilitas statisnya.
1.2Tujuan Penelitian
Penelitian ini bertujuan untuk menghitung dan mengkaji nilai stabilitas statis kelompok kapal yang mengoperasikan alat tangkap statis.
1.3Manfaat Penelitian
Penelitian ini diharapkan dapat bermanfaat sebagai :
1. Bahan acuan dan perkembangan desain-desain kapal perikanan di Indonesia dalam hal tingkat stabilitas kapal ikan.
2 TINJAUAN PUSTAKA
2.1 Karakteristik Kapal Perikanan
Kapal merupakan suatu bentuk konstruksi yang dapat terapung (floating) di air dan mempunyai sifat muat berupa penumpang atau barang, yang tenaga geraknya bisa dengan dayung, angin atau mesin. Nomura and Yamazaki (1997) menambahkan bahwa, kapal perikanan adalah kapal yang digunakan dalam usaha perikanan yang mencakup penggunaan atau aktivitas usaha menangkap atau mengumpulkan, mengelola usaha budidaya sumberdaya perairan dan juga penggunaan dalam beberapa aktivitas misalnya penelitian, inspeksi atau pengawasan.
Menurut Brown (1957), ada beberapa persyaratan umum yang harus dimiliki oleh suatu kapal ikan, agar berhasil dalam menjalankan operasi penangkapan ikan, persyaratan tersebut antara lain:
(1) Stoutness of hull structure;suatu kekuatan dari struktur badan kapal.
(2) Succesful operation of fisheries; keberhasilan operasi penangkapan yang ditunjang dengan berbagai fasilitas yang baik guna terlaksananya operasi penangkapan yang efektif dan efisien, seperti fishing machine, navigasi, radio apparatus dsb.
(3) High stability; stabilitas yang tinggi.
(4)Complete facilities for storing; fasilitas penyimpanan, agar dapat membawa hasil tangkapan yang tetap terjaga mutunya, terutama untuk kapal-kapal yang
melakukan tripnya cukup lama.
Nomura and Yamazaki (1997) juga mengemukakan karakteristik kapal ikan yang dapat membedakan antara kapal ikan dengan kapal lainnya, antara lain:
(1)Speed; kecepatan, selain harus mampu bergerak dengan kecepatan tinggi, kapal ikan juga harus mampu bergerak dengan kecepatan rendah, seperti pada saat
setting longline.
saja kapal mudah membelok), turning cycle yang kecil (kapal dapat membelok dengan diameter putaran yang kecil).
(3)Sea worthiness (layak laut).
(4)Luas lingkup area pelayaran dalam kondisi perairan yang beragam. (5)Konstruksi yang kuat dan ringan.
(6)Propulsion engine (mesin penggerak) yang kecil dan memiliki daya tinggi. (7)Handling dan processing equipment.
(8)Fishing equipment (alat bantu) yang sesuai dengan target dan gear.
Menurut Imron (1989), kapal penangkap ikan mempunyai bentuk tiga dimensi yang kemudian dikenal dengan nama dimensi utama kapal (principal dimension), diantaranya adalah panjang (L), lebar (B), dan dalam (D). Dimensi utama ini dapat digunakan dalam menentukan kapasitas,volume kapal, stabilitas dan perhitungan lainnya. Adapun yang digunakan dalam perhitungan kapal penangkap ikan adalah meliputi panjang seluruh (LOA), Length Between Perpendicular (LBP atau LPP), dalam (D) dan syarat air (d).
2.2Desain Kapal Perikanan
Desain kapal perikanan di Indonesia pada umumnya tidak dilengkapi dengan gambar-gambar desain dalam arsitek perkapalan, seperti general arrangement, lines plan, deck profile construction, engine seating dan lain-lain. Hal ini dikarenakan proses dalam pembuatan kapal yang masih sederhana dan diperoleh secara turun-temurun (Pasaribu, 1985). Menurut Fyson (1985), faktor-faktor yang berpengaruh terhadap desain suatu kapal perikanan adalah tujuan penangkapan, alat dan metode penangkapan, karakteristik geografis daerah penangkapan, kelaiklautan dan keselamatan awak kapal, hukum dan peraturan yang berkaitan dalam mendesain kapal perikanan, pemilihan material kontruksi yang tepat, penanganan dan penyimpanan hasil tangkapan serta faktor-faktor ekonomi.
serta kondisi perairan (Ayodhyoa, 1972). Yulianto (1996), menambahkan bahwa bentuk dari lambung kapal yang terendam di bawah permukaan air berbeda-beda sesuai dengan jenis kapal. Menurut Iskandar dan Pujiati (1995), kapal ikan dapat dibagi kedalam empat kelompok berdasarkan metode pengoperasian alat tangkapnya, antara lain :
(1)Encircling gear, yaitu kelompok kapal yang mengoperasikan alat tangkapnya dengan cara dilingkarkan, seperti misalnya kapal purse seine, payang dan dogol.
(2)Static gear, yaitu kelompok kapal yang mengoperasikan alat tangkapnya dengan cara diam atau menunggu (pasif), seperti misalnya kapal gillnet, trammel net, pole and line dan pancing ulur.
(3)Towed gear/Dragged gear, yaitu kelompok kapal yang mengoperasikan alat tangkapnya dengan cara ditarik, seperti misalnya kapal pukat dan tonda.
(4)Multi purpose, yaitu kelompok kapal yang mengoperasikan alat tangkapnya lebih dari satu alat tangkap.
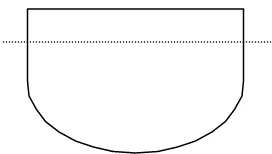
Menurut Dohri dan Soedjana (1983), ada beberapa bentuk badan kapal kalau dilihat dari bawah garis air (WL), antara lain :
(1) Flat Bottom, yaitu badan kapal berbentuk Parallel Epipedium (Gambar 1), (2) U-Bottom, yaitu badan kapal berbentuk penuh atau huruf U (Gambar 2), (3) V-Bottom, yaitu badan kapal berbentuk tajam atau huruf V (Gambar 3),
Gambar 1. Bentuk badan kapal flat bottom
Gambar 3. Bentuk badan kapal V-bottom
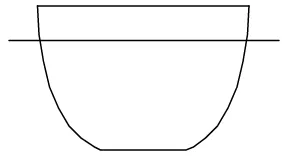
Fyson (1985), menambahkan bahwa ada bentuk badan kapal yang lain, selain ketiga bentuk badan kapal di atas yaitu badan kapal yang berbentuk seperti kurva melengkung (round bottom) lihat Gambar 4. Traung (1960), juga menambahkan bentuk badan kapal yang lain yaitu bentuk badan kapal seperti huruf U dengan garis kaku (akatsuki bottom) lihat Gambar 5.
Gambar 4. Bentuk Badan Kapal Round Bottom
Gambar 5. Bentuk Badan Kapal Akatsuki Bottom
Rahman (2004), dalam penelitiannya menemukan lima jenis bentuk kasko diantaranya adalah U-bottom, round bottom, akatsuki bottom, round flat bottom dan
Gambar 6. Bentuk badan kapal round flat bottom
Gambar 7. Bentuk badan kapal hard chin bottom
Bentuk badan kapal V-Bottom pada bagian haluan menurut Iskandar (1990), bertujuan agar kapal dapat membelah air dengan baik. Kirana (2000), menambahkan bahwa bentuk badan kapal seperti huruf V pada bagian haluan memungkinkan kapal dapat melaju dengan cepat karena dapat membelah masa air di depan kapal dengan mudah. Kirana (2000), juga mengemukakan bahwa bentuk badan kapal round bottom
di bagian midship memungkinkan kapal dapat melakukan olah gerak dengan baik, namun volume kapasitas di bawah deck menjadi kurang maksimal sehingga berpengaruh terhadap olah gerak kapal, khususnya pada kapal kelompok static gear
yang dalam pengoperasian alat tangkapnya terjadi pada salah satu sisi kapal yaitu pada saat melakukan setting maupun hauling.
Menurut Iskandar (1990), bentuk badan kapal yang cenderung rata di bagian
midship kurang begitu menguntungkan untuk melakukan olah gerak kapal. Dari hasil penelitian Farhum (1999), bahwa bentuk U-Bottom sangat cocok untuk kapal pole and line. Hal ini dikarenakan bentuk U-Bottom memiliki nilai stabilitas yang tinggi dan juga kapasitas volume ruang yang memungkinkan bagi penyimpanan bak sebagai tempat umpan hidup dan palkah. Mahriarni (1999), mengemukakan bahwa kapal baja
gillnet di Indramayu di bagian haluan memiliki bentuk V-Bottom, di bagian dasar
midship cenderung bentuk U atau agak rata dan di bagian buritan mengarah ke bentuk rata. Menurut Manurung (1990), kapal pancing ulur Sibolga di bagian haluannya memiliki bentuk V-Bottom dan di bagian midship serta buritannya cenderung berbentuk flat bottom. Adapun menurut Ludfiah (1991), perahu compreng di Cirebon memiliki tipe V-Bottom di bagian haluan dan buritannya serta di bagian midship
memiliki bentuk round bottom.
Langkah awal yang perlu dipertimbangkan dalam hal membandingkan desain kapal adalah rasio dimensi utama kapal, seperti LPP/B, B/D, dan L/D yang berpengaruh terhadap stabilitas maupun ketahanan kapal. Nilai L/B sebagai faktor pembatas dalam peraturan klasifikasi, dan juga digunakan sebagai ukuran memanjang kapal. Ayodhyoa (1972), menambahkan bahwa jika nilai L/B mengecil akan berpengaruh buruk terhadap kecepatan kapal, begitu juga untuk nilai L/D yang membesar akan mengakibatkan kekuatan memanjang kapal melemah adapun nilai
B/D yang membesar akan mengakibatkan stabilitas kapal meningkat akan tetapi akan berpengaruh buruk terhadap propulsive ability. Menurut Iskandar dan Pujiati (1995), nilai rasio L/B dan L/D untuk kapal kelompok static gear lebih besar dibandingkan kapal kelompok lainnya, sehingga membutuhkan stabilitas yang cukup tinggi. Berikut ini beberapa nilai kisaran rasio dimensi kapal kelompok static gear umumnya di Indonesia oleh Iskandar dan Pujiati (1995) masing-masing secara berurutan L/B; L/D
dan B/D adalah berkisar antara 2,83-11,12; 4,58-17,28 dan 0,96-4,68.
Ayodhyoa (1972), mengatakan bahwa koefisien yang menggambarkan keadaan dari sebuah bentuk tubuh kapal adalah Coefficient of fineness yang terdiri dari Cb (Coefficient of block), Cp (Coefficient of prismatic), C⊗ (Coefficient of midship) dan Cw (Coefficient of water plane). Hubungan antara koefisien-koefisien tersebut adalah Cb = Cp x C⊗. Adapun urutan nilai koefisien-koefisien tersebut untuk kapal ikan dari
yang terbesar sampai terkecil adalah Cb < Cp < C ⊗. Menurut Fyson (1985),
(Coefficient of fineness) akan menggambarkan bentuk badan kapal. Koefisien bentuk tersebut terdiri atas :
(1)Cb (Coefficient of block), menunjukkan perbandingan kapasitas displacement
kapal dengan volume bidang empat persegi panjang yang mengelilingi badan kapal.
(2)C⊗ (Coefficient of midship), menunjukkan perbandingan luas area penampang melintang tengah kapal dengan bidang empat persegi panjang yang mengelilingi luas area tersebut.
(3)Cw (Coefficient of water plane), diperoleh dari nilai yang menunjukkan besarnya luas area penampang membujur tengah kapal dibandingkan dengan bidang empat persegi panjang yang mengelilingi luas area tersebut.
(4)Cp (Coefficient of prismatic), menunjukkan perbandingan antara kapasitas
displacement kapal dengan volume yang dibentuk oleh luas area penampang melintang tengah kapal dengan panjang kapal pada water plan.
2.3Stabilitas Kapal Perikanan
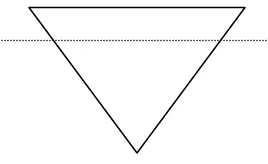
Menurut Taylor (1977) dan Hind (1982), stabilitas adalah kemampuan kapal untuk kembali ke posisi semula setelah mengalami kemiringan akibat bekerjanya gaya-gaya pada kapal. Adapun stabilitas statis menggambarkan stabilitas kapal yang diukur dalam kondisi kapal tidak mendapat pengaruh faktor luar (arus , angin dan gelombang) dalam berbagai sudut oleng yang berbeda.Taylor (1977) dan Hind (1982), juga mengemukakan bahwa stabilitas pada sebuah kapal dipengaruhi oleh 3 titik konsentrasi gaya yang bekerja pada kapal, ketiga titik tersebut antara lain :
(1)Titik B (centre of buoyancy), yaitu titik khayal yang mendorong gaya apung yang menyebabkan kapal terapung ke atas.
(2)Titik G (centre of gravity), yaitu titik khayal yang mendorong gaya berat yang menyebabkan gaya kapal ke bawah.
kondisi kapal dalam keadaan posisi miring.
Taylor (1977) dan Hind (1982), juga membagi stabilitas ke dalam 3 bagian yaitu :
(1)Keseimbangan stabil, dimana suatu kondisi kapal dapat kembali ke posisi semula (initial stability / equilibrium). Kondisi ini terjadi bila titik G berada di bawah titik M, atau kapal memiliki nilai GM yang positif. Pada kondisi seperti ini kapal memiliki gaya pengembali yang positif yang dapat mengembalikan kapal ke posisi semula (Gambar 8.b).
(2)Keseimbangan netral, dimana suatu kondisi kapal tidak bisa kembali ke posisi semula, melainkan tetap dalam keadaan miring akibat adanya gaya yang bekerja pada kapal. Kondisi ini terjadi bila titik G dan titik M berimpit pada satu titik atau kapal memiliki nilai GM nol (Gambar 8.c).
Gambar 8. Posisi Keseimbangan kapal (Sumber : Hind, 1982)
Nomura and Yamazaki (1977), mengemukakan bahwa keadaan suatu kapal dikatakan setimbang apabila titik apung (B) terletak dalam satu garis lurus dengan titik berat (G) dan titik berat harus berada dibawah titik M. Berdasarkan standar IMO nilai GM sebaiknya tidak kurang dari 350 mm (Fyson, 1985), sedangkan menurut
Keterangan :
B : Titik Pusat Apung a. Posisi Seimbang G : Titik Pusat Gravitasi b. Keseimbangan stabil M : Titik Metacenter c. Keseimbangan netral GZ : Lengan Pengembali d. Keseimbangan tidak stabil K : Lunas Kapal
WL : Garis Air
W : Gaya yang Bekerja pada Kapal B-B1 : Sudut Oleng
L W M G B B W K K W W a b
W1 L1
W K G K W M L M
B B1
Z K
O
W M c W BW1 L1
K B1 B G K W L W M M d W
W1 L1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0 10 20 30 40 50 60 70 80 90
Sudut kemiringan (derajat)
Nomura (1977), kriteria yang sangat menentukan adalah jarak GM, KG dan perbandingan nilai KG/D.
2.4Kurva GZ
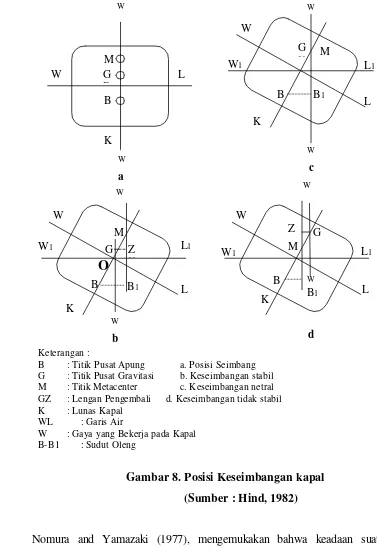
Fyson (1985) mengemukakan bahwa kajian mengenai stabilitas kapal erat hubungannya dengan perhitungan nilai GZ atau lengan pengembali. Derret (1991) menambahkan bahwa kurva stabilitas statis suatu kapal menggambarkan hubungan antara nilai GZ atau lengan pengembali dengan berbagai sudut kemiringan oleng kapal dalam ton displacement yang tetap, seperti pada Gambar 9 di bawah ini.
Gambar 9. Kurva stabilitas statis kapal (Sumber : Derrett, 1991)
Derret (1991) memberikan penjelasan mengenai kurva stabilitas statis kapal pada Gambar 9, yaitu :
(1)Rentang stabilitas (The range of stability), dimana kapal memiliki nilai GZ yang positif. Nilai rentang stabilitas pada Gambar 9 berkisar antara 0o sampai 86o (C); (2)Sudut stabilitas yang semakin berkurang (The angle of vanishing stability), dimana
kapal memiliki nilai GZ nol atau besar sudut dimana terjadi perubahan nilai GZ
C
Y
X
D
Z
E
Garis air
dari positif ke negatif. Besar sudut stabilitas yang semakin berkurang pada Gambar 9 adalah 86o (D);
(3)Nilai GZ maksimum, dimana adanya perpotongan garis tegak lurus antara skala kemiringan sudut oleng kapal dengan titik tertinggi pada kurva, yang diperoleh dengan cara menarik garis tangen pada titik tertinggi dalam kurva. Nilai GZ maksimum pada Gambar 9 sebesar 0,65 m dengan sudut oleng 42o (E);
(4)Tinggi metacentre (GM), dimana diperoleh dengan cara menarik garis tangen pada kurva yang melalui OX dan garis tegak lurus (YZ) yang memotong sudut oleng sebesar 57,3o. tinggi metacentre pada Gambar 9 sebesar 0,54 m.
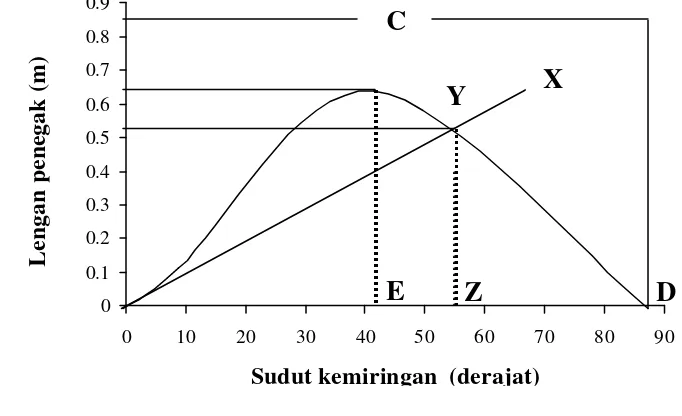
Hind (1982) menyatakan bahwa kapal dalam kondisi muatan penuh, nilai inklinasi masing-masing sudut diplotkan sehingga membentuk suatu kurva yang dinamakan dengan kurva stabilitas statis.
Berikut ini ilustrasi kurva stabilitas statis kapal dalam berbagai nilai inklinasi masing-masing sudut yang diplotkan dapat dilihat pada Gambar 10.
Gambar 10. Kurva stabilitas statis kapal dengan sudut keolengan yang berbeda
(Sumber : Hind, 1982)
0 0.05 0.1 0.15 0.2
0 10 20 30 40 50 60 70 80 90
Sudut kemiringan (derajat)
Tangent line
3 METODOLOGI
3.1 Waktu dan Tempat Penelitian
Kegiatan penelitian ini dilaksanakan pada bulan Januari – November 2005 di Laboratorium Kapal Perikanan dan Navigasi, Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
3.2 Bahan dan Alat Penelitian
Bahan yang digunakan dalam penelitian ini adalah data gambar body plan dan dimensi utama kapal kelompok alat tangkap statis yang diambil berdasarkan studi literatur. Alat yang digunakan adalah 1 unit PC (personal computer), alat tulis,
software PGZ, serta Microsoft excel yang digunakan dalam simulasi dan pengolahan data.
3.3 Metode Penelitian
Penelitian ini bersifat simulasi-numerik, yaitu melakukan simulasi terhadap data yang diperoleh dari studi literatur. Dari hasil studi literatur diperoleh sepuluh
body plan kapal statik, yaitu kelompok kapal yang mengoperasikan alat tangkap dengan cara diam/statis. Kesepuluh kapal tersebut selanjutnya disimulasi untuk memperoleh nilai stabilitas statis. Selain kesepuluh data kapal tersebut, juga diperoleh dua kapal lainnya yang merupakan hasil penelitian tentang stabilitas statis kapal yang telah dilakukan oleh Handayani (2005) dan Pratiwi (2005).
3.3.1 Jenis Data
berkurang (vanishing angle), nilai lengan pengembali (GZ) maksimum, sudut GZ maksimum dan tinggi metacentre (GM) dari beberapa kapal yang mengoperasikan alat tangkap statis.
3.3.2 Pengumpulan Data
Data yang terdiri dari gambar body plan kapal, length perpendicular (Lpp),
breadth (B), depth (D) dan draft (d) diperoleh melalui studi literatur dari hasil penelitian Rahman (2004). Adapun data mengenai rentang stabilitas, flooding angle,
vanishing angle, lengan pengembali (GZ) maksimum, sudut GZ maksimum serta tinggi metacentre diperoleh melalui simulasi dengan menggunakan program GZ dan
MS. Excel. Dua kapal lainnya diperoleh dari hasil penelitian Handayani (2005) dan Pratiwi (2005).
3.3.3 Pengolahan Data
Pengolahan data dilakukan dengan menggunakan software PGz kemudian hasilnya disajikan dalam bentuk grafik dan tabulasi dalam MS. Excel. Dalam pengolahan data, kondisi kapal yang digunakan adalah kondisi kapal dalam muatan penuh (full load condition). Adapun asumsi yang digunakan dalam penelitian ini adalah :
(1)Kapal berada pada kondisi perairan yang tenang;
(2)Draft kapal sama antara bagian haluan (Fore Perpendicular) dengan di buritan (After Perpendicular) atau posisi kapal dalam keadaan trim even keel;
(3)Kapal dalam kondisi keseimbangan
(4)Jarak dari lunas (keel) ke titik berat kapal (gravity) atau KG sama dengan tinggi kapal (depth).
3.3.4 Analisis Data
comparative study dilakukan terhadap nilai-nilai stabilitas statis antar kelompok kapal yang memiliki perbedaan bentuk kasko, selang nilai B/D dan ton displacement kapal.
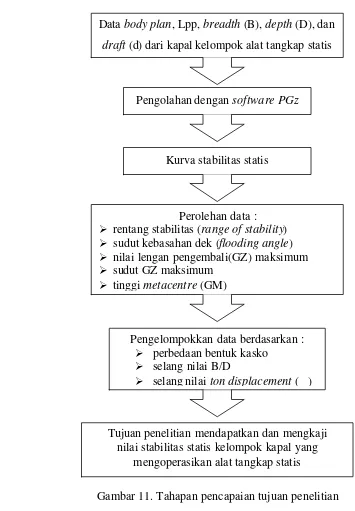
Proses secara keseluruhan dalam mencapai tujuan dapat digambarkan secara ringkas dan sistematis pada Gambar 11.
Gambar 11. Tahapan pencapaian tujuan penelitian Tujuan penelitian mendapatkan dan mengkaji
nilai stabilitas statis kelompok kapal yang mengoperasikan alat tangkap statis
Perolehan data :
Ø rentang stabilitas (range of stability)
Ø sudut kebasahan dek (flooding angle)
Ø nilai lengan pengembali(GZ) maksimum
Ø sudut GZ maksimum
Ø tinggi metacentre (GM)
Pengolahan dengan software PGz
Kurva stabilitas statis
Pengelompokkan data berdasarkan :
Ø perbedaan bentuk kasko
Ø selang nilai B/D
Ø selang nilai ton displacement ( ) Data body plan, Lpp, breadth (B), depth (D), dan
4 HASIL DAN PEMBAHASAN
4.1. Bentuk Kasko dan Dimensi Kapal Alat Tangkap Statis
Bentuk kasko adalah bentuk badan kapal yang terendam di bawah garis air (water line). Bentuk kasko kapal kelompok alat tangkap statis yang diperoleh berdasarkan data body plan di bagian haluan memiliki bentuk yang relatif sama yaitu
V- bottom. Bentuk V- bottom di bagian haluan pada kapal kelompok alat tangkap statis ini sudah cukup bagus, sehingga kapal dapat membelah air dengan baik. Bentuk kasko di bagian buritan juga relatif hampir sama dengan bentuk kasko di bagian
midship. Berdasarkan kesimpulan dari hasil penelitian Rahman (2004) diketahui bahwa untuk kelompok kapal yang mengoperasikan alat tangkap statis memiliki beberapa bentuk kasko, yaitu U-bottom, round bottom, round flat bottom dan akatsuki bottom. Keempat jenis bentuk kasko tersebut dapat dijelaskan di bawah ini.
1) U – bottom
Bentuk U-bottom merupakan bentuk yang paling umum dimiliki oleh kapal kelompok alat tangkap statis. Dari keduabelas data kapal yang diperoleh enam kapal di antaranya bentuk kasko U-bottom. Bentuk ini memiliki kestabilan yang tinggi dan volume ruang atau kapasitas penyimpanan dibawah dek yang besar, sehingga sangat cocok bagi kapal yang mengopersikan alat tangkap secara statis. Akan tetapi bentuk ini memiliki tahanan kasko yang besar sehingga olah gerak (manouvering) dan kecepatan (speed) yang dimiliki terbatas, namun bukanlah kecepatan yang diutamakan bagi kapal yang mengoperasikan alat tangkap statis melainkan kestabilan yang tinggi. Kapal kelompok alat tangkap statis yang termasuk kedalam bentuk ini adalah Gillnet Indramayu (GNT1), Pole and Line Sulawesi Utara, Long line 28,4 GT Pel. Ratu (LL1), Long line 60 GT Bali (LL3), Long line 31 GT Pel. Ratu (LL4) dan
Gambar 12. Bentuk kasko tipe U-bottom pada kapal alat tangkap statis
2) Round bottom
Dari hasil studi literatur, diperoleh tiga kapal yang memiliki bentuk kasko
round bottom. Bentuk round bottom merupakan bentuk badan kapal yang bagian dasarnya seperti kurva melengkung hingga ke sheer kapal. Bentuk ini memiliki tahanan kasko yang lebih kecil jika dibandingkan dengan kedua bentuk kasko diatas (U–bottom dan round flat bottom) sehingga menghasilkan olah gerak (manouvering) dan kecepatan (speed) yang tinggi. Akan tetapi bentuk ini kurang cocok bagi kapal kelompok static gear karena memiliki sudut oleng yang besar pada saat hauling yang dilakukan pada salah satu sisi lambung kapal. Selain itu, kapasitas penyimpanan di bawah dek sangat terbatas. Berdasarkan data yang diperoleh kapal kelompok alat tangkap statis yang memiliki bentuk ini adalah Trammel net (TRN), Gillnet Jakarta Utara (GNT2) dan Compreng Cirebon (CR). Bentuk kasko round bottom dapat dilihat pada Gambar 13 di bawah ini.
Gambar 13. Bentuk kasko tipe round bottom pada kapal alat tangkap statis
3) Round flat bottom
Dari hasil studi literatur, diperoleh dua kapal yang memiliki bentuk kasko
pada saat melakukan hauling di salah satu sisi lambung kapal, juga memiliki volume ruang atau kapasitas penyimpanan di bawah dek yang cukup besar. Kapal kelompok alat tangkap statis yang termasuk kedalam bentuk ini berdasarkan data yang diperoleh adalah kapal Bubu lipat (BL) dan kapal Pancing ulur (PU). Bentuk kasko round flat bottom dapat dilihat pada Gambar14 di bawah ini.
Gambar 14. Bentuk kasko tipe round flat bottom pada kapal alat tangkap statis
4) Akatsuki bottom
Dari studi literatur, hanya diperoleh satu kapal yang memiliki bentuk kasko
akatsuki bottom. Bentuk akatsuki bottom merupakan bentuk badan kapal yang hampir menyerupai huruf U, akan tetapi memiliki lekukan yang setiap lekukannya membentuk suatu sudut dengan rata pada bagian dasarnya. Secara teori bentuk ini sangat menguntungkan bagi kelompok kapal yang mengoperasikan alat tangkapnya secara statis, karena memungkinkan memiliki stabilitas yang cukup baik. Berdasarkan data yang diperoleh, bentuk akatsuki bottom ini hanya dimiliki oleh kapal Long line
40 GT Bali (LL 2). Bentuk kasko akatsuki bottom dapat dilihat pada Gambar 15 di bawah ini.
Gambar 15. Bentuk kasko tipe akatsuki bottom pada kapal alat tangkap statis
[image:31.612.258.399.521.587.2]dapat disebabkan juga kurangnya pengetahuan yang dimiliki oleh masing- masing pembuat kapal di galangan kapal tradisional.
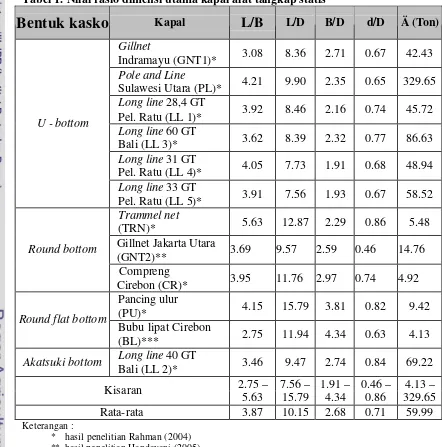
[image:32.612.91.533.238.685.2]Dimensi kapal-kapal yang mengoperasikan alat tangkap statis yang diteliti memiliki nilai yang bervariasi, sehingga nilai rasio dimensi yang dihasilkanpun bervariasi. Perbedaan nilai rasio dimensi ini berpengaruh terhadap kemampuan (ability) dari suatu kapal. Nilai rasio dimensi kapal kelompok alat tangkap statis yang terdiri dari L/B, L/D, B/D dan d/D dapat dilihat pada Tabel 1di bawah ini.
Tabel 1. Nilai rasio dimensi utama kapal alat tangkap statis
Bentuk kasko
KapalL/B
L/D B/D d/D Ä (Ton)Gillnet
Indramayu (GNT1)* 3.08 8.36 2.71 0.67 42.43
Pole and Line
Sulawesi Utara (PL)* 4.21 9.90 2.35 0.65 329.65
Long line 28,4 GT
Pel. Ratu (LL 1)* 3.92 8.46 2.16 0.74 45.72
Long line 60 GT
Bali (LL 3)* 3.62 8.39 2.32 0.77 86.63
Long line 31 GT
Pel. Ratu (LL 4)* 4.05 7.73 1.91 0.68 48.94
U - bottom
Long line 33 GT
Pel. Ratu (LL 5)* 3.91 7.56 1.93 0.67 58.52
Trammel net
(TRN)* 5.63 12.87 2.29 0.86 5.48
Gillnet Jakarta Utara
(GNT2)** 3.69 9.57 2.59 0.46 14.76
Round bottom
Compreng
Cirebon (CR)* 3.95 11.76 2.97 0.74 4.92 Pancing ulur
(PU)* 4.15 15.79 3.81 0.82 9.42
Round flat bottom
Bubu lipat Cirebon
(BL)*** 2.75 11.94 4.34 0.63 4.13
Akatsuki bottom Long line 40 GT
Bali (LL 2)* 3.46 9.47 2.74 0.84 69.22
Kisaran 2.75 –
5.63 7.56 – 15.79 1.91 – 4.34 0.46 – 0.86 4.13 – 329.65
Rata-rata 3.87 10.15 2.68 0.71 59.99
Keterangan :
Selanjutnya yang hanya akan dibahas adalah rasio nilai B/D dan ton displacement kapal. Hal ini dikarenakan kedua hal tersebut yang selanjutnya akan digunakan untuk mengkaji stabilitas statis kapal. Dari hasil penelitian Rahman (2004), dijelaskan bahwa kesepuluh kapal selain Gillnet Jakarta Utara (GNT 2) dan Bubu lipat Cirebon (BL), memiliki kisaran nilai rasio B/D antara 1,91 m – 3,81 m dengan nilai rasio rata-rata sebesar 2,52 m. Kisaran nilai rasio B/D ini seluruhnya (100%) masuk ke dalam kisaran kapal-kapal kelompok alat tangkap statis yang ada di Indonesia pada umumnya yaitu berkisar antara 0,96 m - 4,68 m (Iskandar dan Pujiati, 1995). Hal ini menunjukkan bahwa stabilitas yang dimiliki oleh kapal-kapal static gear yang diteliti juga berada dalam kisaran stabilitas kapal kelompok alat tangkap statis umumnya yang ada di Indonesia. Semakin besar nilai rasio B/D maka semakin baik stabilitas kapal tersebut. Stabilitas yang baik sangat dibutuhkan sekali bagi kapal kelompok static gear, terutama pada saat melakukan operasi penangkapan baik itu pada saat setting maupun hauling. Adapun untuk kapal Gillnet Jakarta Utara (GNT 2) dan Bubu lipat Cirebon (BL), memiliki kisaran nilai rasio B/D antara 2,59 m – 4,34 m dengan nilai rasio rata-rata sebesar 3,47 m. Kisaran nilai rasio inipun masuk dalam kisaran nilai rasio B/D yang dikeluarkan oleh Iskandar dan Pujiati (1995) yaitu berkisar antara 0,96 m – 4,68 m.
Nilai ton displacement merupakan berat dari air yang dipindahkan bila kapal terendam hingga garis air (water line). Adapun nilai ton displacement yang diperoleh berkisar antara 4,13 ton - 329,65 ton dengan rata-rata sebesar 59,99 ton.
4.2 Stabilitas Statis Kapal Kelompok Alat Tangkap Statis
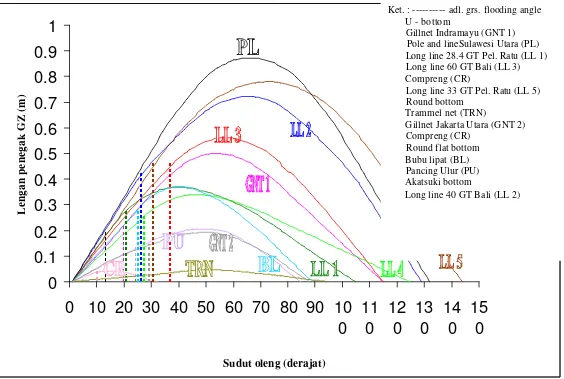
sudut keolengan yang berbeda. Pada Gambar 16 dapat disajikan kurva stabilitas statis dari hasil perhitungan beberapa kapal kelompok alat tangkap statis yang menjadi obyek penelitian dalam kondisi intact stability (IS) maupun un-intact stability (UIS).
Pada Gambar 16 memperlihatkan kurva stabilitas statis keduabelas kapal yang dikaji. Pada kurva tersebut terlihat bahwa pada tiap-tiap sudut kemiringan akan terbentuk lengan GZ yang akan mengembalikan kapal kembali ke posisi tegak semula. Pada sudut kemiringan 0o lengan pengembali GZ tidak terbentuk atau le ngan pengembali GZ bernilai 0. Hal ini disebabkan titik B (buoyancy) dan titik G (gravity) berada pada satu garis lurus secara vertikal. Pada kondisi seperti inilah kapal dapat disebut dalam keadaan seimbang (equilibrium), sehingga lengan pengembali GZ tidak terbentuk atau bernilai 0. Nilai lengan pengembali GZ ini akan terbentuk dengan adanya pengurangan atau penambahan muatan atau adanya gaya-gaya dari luar yang bekerja hingga mencapai nilai GZ maksimum. Nilai pengembali GZ ini akan terus meningkat hingga mencapai sudut kemiringan maksimum (titik kritis) dimana pada sudut tersebut kemampuan kapal untuk kembali ke posisi semula menjadi berkurang hingga akhirnya lengan pengembali GZ bernilai 0.
Gambar 16. Kurva stabilitas statis kapal kelompok alat tangkap statis
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 10 20 30 40 50 60 70 80 90 10
0
11
0
12
0
13
0
14
0
15
0
Sudut oleng (derajat)
Lengan penegak GZ (m)
Ket. : --- adl. grs. flooding angle U - bottom
Gillnet Indramayu (GNT 1) Pole and lineSulawesi Utara (PL) Long line 28.4 GT Pel. Ratu (LL 1) Long line 60 GT Bali (LL 3) Compreng (CR)
Long line 33 GT Pel. Ratu (LL 5) Round bottom
Trammel net (TRN)
Gillnet Jakarta Utara (GNT 2) Compreng (CR)
Round flat bottom Bubu lipat (BL) Pancing Ulur (PU)
Akatsuki bottom
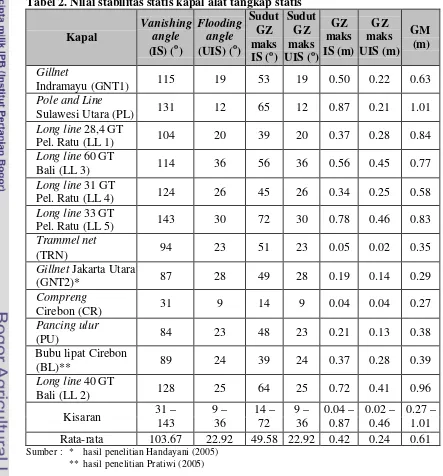
Pada Gambar 16 dapat dilihat bahwa besarnya sudut kebasahan dek (flooding angle) berkisar antara 9o – 36o. Nilai kisaran ini menunjukkan besarnya sudut GZ maksimum yang dimiliki oleh kapal-kapal kelompok static gear yang diteliti pada saat kondisi un- intact stability. Hal ini berarti kapal-kapal tersebut maksimum hanya mampu kembali ke posisi tegak semula sampai batas flooding angle. Lebih dari itu, kapal akan terbalik. Nilai- nilai stabilitas statis kapal kelompok alat tangkap statis selengkapnya dapat dilihat pada Tabel 2 di bawah ini.
Tabel 2. Nilai stabilitas statis kapal alat tangkap statis
Kapal
Vanishing angle
(IS) (o)
Flooding angle
(UIS) (o)
Sudut GZ maks IS (o)
Sudut GZ maks UIS (o)
GZ maks IS (m) GZ maks UIS (m) GM (m) Gillnet
Indramayu (GNT1) 115 19 53 19 0.50 0.22 0.63
Pole and Line
Sulawesi Utara (PL) 131 12 65 12 0.87 0.21 1.01
Long line 28,4 GT
Pel. Ratu (LL 1) 104 20 39 20 0.37 0.28 0.84
Long line 60 GT
Bali (LL 3) 114 36 56 36 0.56 0.45 0.77
Long line 31 GT
Pel. Ratu (LL 4) 124 26 45 26 0.34 0.25 0.58
Long line 33 GT
Pel. Ratu (LL 5) 143 30 72 30 0.78 0.46 0.83
Trammel net
(TRN) 94 23 51 23 0.05 0.02 0.35
Gillnet Jakarta Utara
(GNT2)* 87 28 49 28 0.19 0.14 0.29
Compreng
Cirebon (CR) 31 9 14 9 0.04 0.04 0.27
Pancing ulur
(PU) 84 23 48 23 0.21 0.13 0.38
Bubu lipat Cirebon
(BL)** 89 24 39 24 0.37 0.28 0.39
Long line 40 GT
Bali (LL 2) 128 25 64 25 0.72 0.41 0.96
Kisaran 31 – 143 9 – 36 14 – 72 9 – 36 0.04 – 0.87 0.02 – 0.46 0.27 – 1.01 Rata-rata 103.67 22.92 49.58 22.92 0.42 0.24 0.61 Sumber : * hasil penelitian Handayani (2005)
Pada Tabel 2 dapat dilihat bahwa kapal-kapal kelompok alat tangkap statispada saat intact stability memiliki kisaran vanishing angle antara 31o - 143o dengan rata-rata sudut sebesar 103,67o. Kemudian pada kondisi un-intact stability memiliki sudut kebasahan dek (flooding angle) berkisar antara 9o – 36o dengan rata-rata sudut sebesar 22,92o. Perbedaan besar sudut antara vanishing angle saat kondisi intact stability dengan flooding angle pada saat kondisi un-intact stability adalah rata-rata sebesar 80.75o dengan persentase selisih sudut 78 %. Perbedaan persentase sudut ini menunjukkan bahwa batas maksimum sudut (titik kritis) kapal-kapal kelompok alat tangkap statis yang diteliti berada jauh lebih kecil dari besarnya sudut pada saat kondisi intact stability.
Dari Tabel 2 di atas terlihat juga bahwa besarnya sudut GZ maksimum pada kondisi intact stability berkisar antara 14o - 72o dengan rata-rata sudut sebesar 49,58o dan pada kondisi un-intact stability berkisar antara 9o – 36o dengan rata-rata sudut sebesar 22,92o. Oleh karena kapal-kapal kelompok alat tangkap statis yang di teliti tidak kedap air maka kondisi intact stability tidak terpenuhi sehingga sudut GZ maksimum berada pada flooding angle-nya dengan persentase perbedaan sudut GZ maksimum 54 % dan rata-rata perbedaan besar sudut GZ maksimum sebesar 26,66o. Hal ini juga berlaku sama untuk nilai lengan pengembali GZ maksimum pada kondisi
intact stability yang berkisar antara 0,04 m - 0,87 m dengan rata-rata nilai GZ maksimum sebesar 0,42 m dan pada kondisi un-intact stability berkisar antara 0,02 m – 0,46 m dengan rata-rata nilai GZ maksimum sebesar 0,24 m yaitu berada pada
flooding angle-nya dengan persentase perbedaan nilai lengan pengembali GZ maksimum 43 % dan rata-rata perbedaan nilai lengan pengembali GZ maksimum sebesar 0,18 m. Adapun untuk nilai tinggi/radius metacentre (GM) berkisar antara 0,27 m – 1,01 m dengan tinggi GM rata-rata sebesar 0,61 m.
4.2.1 Stabilitas statis berdasarkan perbedaan bentuk kasko
Kapal-kapal kelompok alat tangkap statis yang diteliti memiliki empat jenis bentuk kasko yang berbeda. Perbedaan ini terutama terlihat pada bagian midship-nya.
Keempat jenis bentuk kasko tersebut adalah U - bottom, round bottom, round flat bottom dan akatsuki bottom. Pada Gambar 17 disajikan grafik hubungan antara bentuk kasko kapal kelompok static gear dengan vanishing angle saat kapal dalam kondisi intact stability dan flooding angle saat kapal dalam kondisi un-intact stability. Adapun nilai- nilai stabilitas statis berdasarkan bentuk kasko dapat dilihat pada lampiran 2.
Gambar 17. Nilai vanishing angle kondisi IS dan flooding angle
kondisi UIS berdasarkan perbedaan bentuk kasko
Berdasarkan grafik di atas dapat dilihat bahwa bentuk kasko U-bottom memiliki kisaran vanishing angle pada kondisi intact stability antara 104o – 143o dengan rata-rata sudut sebesar 121,83o dan memiliki kisaran flooding angle pada kondisi un-intact stability antara 12o – 36o dengan rata-rata sud ut sebesar 23,83o. Persentase perbedaan
vanishing angle pada saat intact stability dengan flooding angle pada saat un-intact stability sebesar 80 %. Hal ini berarti terjadi perubahan sudut dari kondisi intact stability ke kondisi un-intact stability (kondisi sebenarnya) sebesar 98o. Bentuk kasko
round bottom memiliki kisaran vanishing angle pada kondisi intact stability antara 31o – 94o dengan rata-rata sudut sebesar 70,67o dan flooding angle pada kondisi un-intact stability berkisar antara 9o – 28o dengan rata-rata sudut sebesar 20o. Persentase perbedaan vanishing angle pada saat intact stability dengan flooding angle pada saat
0 20 40 60 80 100 120 140 160
LL 4 LL 5 LL 1 LL 3 PL GNT 1 TRN GNT 2 CR PU BL LL 2
U - bottom Round bottom Round flat bottom Akatsuki
bottom
Bentuk kasko kapal
Kondisi (IS) Kondisi (UIS)
un-intact stability sebesar 72 %. Hal ini menunjukkan adanya perubahan sudut dari kondisi intact stability ke kondisi un-intact stability (kondisi sebenarnya) sebesar 50,67o.
Bentuk kasko berikutnya adalah bentuk round flat bottom. Bentuk round flat bottom dimiliki oleh kapal Pancing ulur (PU) dan kapal Bubu lipat Jakarta Utara (BL) dari kapal-kapal kelompok static gear yang diteliti. Bentuk kasko round flat bottom
memiliki kisaran vanishing angle pada kondisi intact stability sebesar 84o - 89o dan pada kondisi un-intact stability memiliki kisaran flooding angle antara 23o - 24o. Persentase perbedaannya mencapai 73 % atau terjadi perub ahan sudut sebesar 63o. Untuk bentuk kasko akatsuki bottom hanya dimiliki oleh kapal Long line 40 GT Bali (LL) dengan vanishing angle pada kondisi intact stability sebesar 128o dan pada kondisi un-intact stability memiliki flooding angle sebesar 25o dengan persentase perbedaan mencapai 80 % dan terjadi perubahan sudut sebesar 103o.
Berdasarkan pemaparan di atas dapat diketahui bahwa bentuk U-bottom dan
akatsuki bottom memiliki nilai vanishing angle pada kondisi intact stability dan
flooding angle pada kondisi un-intact stability yang lebih besar dibandingkan dengan dua bentuk kasko lainnya.
Sudut GZ maksimum kapal-kapal kelompok alat tangkap statis juga mengalami perbedaan sesuai dengan perbedaan bentuk kasko. Sudut GZ maksimum adalah sudut yang menimbulkan lengan pengembali (GZ) yang maksimum/terbesar. Berikut ini disajikan grafik hubungan antara bentuk kasko kapal kelompok alat tangkap statis dengan sudut GZ maksimum pada saat kapal dalam kondisi intact stability dan un-intact stability.
Gambar 18. Sudut GZ maksimum kondisi IS dan UIS berdasarkan perbedaan bentuk kasko
Dari grafik tersebut dapat dilihat bahwa bentuk kasko U-bottom pada kondisi
intact stability memiliki kisaran sudut pada GZ maksimum antara 39o – 72o dengan rata-rata sudut pada GZ maksimum sebesar 55o. Adapun kisaran sudut pada GZ maksimum pada kondisi un-intact stability antara 12o – 36o dengan rata-rata sudut pada GZ maksimum sebesar 23,83o. Persentase perubahannya mencapai 57 % atau terjadi perubahan sudut pada GZ maksimum dari kondisi intact stability ke un-intact stability (kondisi sebenarnya) sebesar 31,17o.
Sudut pada GZ maksimum untuk bentuk kasko round bottom berkisar antara 14o – 51o dengan rata-rata sudut pada GZ maksimum sebesar 38o pada kondisi intact stability dan kisaran sudut pada GZ maksimum antara 9o – 28o dengan rata-ratanya sebesar 20o pada kondisi un-intact stability. Hal ini menunjukkan adanya perubahan sudut pada GZ maksimum dari kondisi intact stability ke kondisi un-intact stability
(kondisi sebensrnya) sebesar 47 % atau 18o. Adapun bentuk kasko round flat bottom
memiliki sudut pada GZ maksimum berkisar antara 39o - 48o pada kondisi intact stability dan berkisar antara 23o - 24o pada kondisi un-intact stability (kondisi sebensrnya). Persentase perbedaan sudut pada GZ maksimumnya mencapai 46 % atau sebesar 20o dari kondisi intact stability ke un-intact stability (kondisi sebenarnya). Bentuk akatsuki bottom memiliki sudut pada GZ maksimum sebesar 64o pada kondisi
0 10 20 30 40 50 60 70 80
LL 4 LL 5 LL 1 LL 3 PL GNT 1 TRN GNT 2 CR PU BL LL 2
U - bottom Round bottom Round flat bottom Akatsuki
bottom Bentuk kasko kapal
Kondisi IS Kondisi UIS
intact stability dan 25o pada kondisi un-intact stability, dengan persentase perubahannya 61 % atau sebesar 39o dari kondisi intact stability ke un-intact stability
(kondisi sebenarnya).
Berdasarkan pemaparan di atas dapat diketahui bahwa bentuk U-bottom dan
akatsuki bottom pada kondisi intact stability dan un-intact stability memiliki sudut pada GZ maksimum yang lebih besar dibandingkan dengan dua bentuk kasko lainnya. Kapal-kapal kelompok alat tangkap statis dalam melakukan operasinya mengalami berbagai kemiringan kapal, sehingga setiap kapal harus memiliki kemampuan untuk dapat kembali ke posisi semula. Kemampuan kapal yang optimal untuk dapat kembali ke posisi semula inilah yang disebut dengan lengan pengembali GZ maksimum. Lengan pengembali GZ maksimum dalam berbagai bentuk kasko pada saat kondisi kapal dalam intact stability dan un-intact stability dapat disajikan pada grafik di bawah ini.
[image:41.612.121.502.371.558.2]Gambar 19. Nilai GZ maksimum kondisi ISdan UIS berdasarkan perbedaan bentuk kasko
Gambar 19 memperlihatkan bahwa nilai kisaran GZ maksimum untuk bentuk kasko U-bottom pada kondisi intact stability adalah 0,34 m – 78 m dengan nilai GZ maksimum rata-rata sebesar 0,57 m dan pada kondisi un-intact stability (kondisi sebenarnya)adalah berkisar antara 0,21 m – 0,46 m dengan nilai GZ maksimum rata-rata sebesar 0,31 m. Persentase perbedaan nilai GZ maksimum antara kondisi intact
GZ maksimum (m) 0.00 0.20 0.40 0.60 0.80 1.00
LL 4 LL 5 LL 1 LL 3 PL GNT 1 TRN GNT 2 CR PU BL LL 2
U - bottom Round bottom Round flat bottom Akatsuki
bottom Bentuk kasko kapal
stability dengan un-intact stability (kondisi sebensrnya) adalah 45 %. Hal ini berarti terjadi perubahan nilai GZ maksimum dari kondisi intact stability ke kondisi un-intact stability (kondisi sebensrnya)sebesar 0,26 m.
Bentuk kasko round bottom memiliki kisaran nilai GZ maksimum pada kondisi
intact stabiliy 0,04 m – 0,19 m dengan nilai rata-rata GZ maksimum sebesar 0,09 m dan nilai GZ maksimum pada kondisi un-intact stability (kondisi sebenarnya) berkisar antara 0,02 – 0,14 m dengan nilai rata-rata GZ maksimum sebesar 0,07 m. Persentase perbedaan nilai GZ maksimum pada kedua kondisi tersebut 28 % atau terjadi perubahan nilai sebesar 0,03 m. Untuk bentuk kasko round flat bottom
memiliki nilai GZ maksimum berkisar antara 0,21 m - 0,37 m pada kondisi intact stability dan 0,13 m – 0,28 m pada kondisi un-intact stability (kondisi sebenarnya) dengan persentase perbedaan 28 % atau terjadi perubahan nilai GZ maksimum dari kondisi intact stability ke kondisi sebenarnya (un-intact stability) sebesar 0,08 m. Nilai GZ maksimum yang dimiliki oleh bentuk kasko akatsuki bottom sebesar 0,72 m pada kondisi intact stability dan 0,41 m pada kondisi un-intact stability (kondisi sebenarnya) dengan persentase perbedaan 43 % atau terjadi perubahan nilai GZ maksimum dari kondisi intact stability ke kondisi sebenarnya (un-intact stability) sebesar 0,31 m.
Berdasarkan pemaparan di atas dapat diketahui bahwa bentuk U-bottom pada kondisi intact stability dan un-intact stability memiliki nilai GZ maksimum yang lebih besar dibandingkan dengan tiga bentuk kasko lainnya.
Gambar 20. Nilai GM berdasarkan perbedaan bentuk kasko
Nilai GM yang dimiliki oleh bentuk kasko U-bottom berkisar antara 0,58 m – 1,01 m dengan rata-rata sebesar 0,78 m. Bentuk kasko round bottom memiliki kisaran nilai GM antara 0,27 m – 0,35 m dengan rata-rata sebesar 0,30 m. Nilai GM untuk bentuk kasko round flat bottom berkisar antara 0,38 m – 0,39 m. Adapun untuk bentuk kasko akatsuki bottom memiliki nilai GM sebesar 0,96 m.
Berdasarkan pemaparan di atas dapat diketahui bahwa bentuk U-bottom memiliki nilai GM yang lebih besar dibandingkan dengan tiga bentuk kasko lainnya.
Berdasarkan perbedaan jenis bentuk kasko, kapal-kapal kelompok alat tangkap statis memiliki nilai stabilitas statis yang berbeda-beda. Dari nilai- nilai parameter stabilitas statis yang disajikan dalam beberapa grafik di atas, terlihat bahwa bentuk kasko U-bottom dan akatsuki bottom memiliki stabilitas statis yang lebih baik dari bentuk kasko round flat bottom dan round bottom.
4.2.2 Stabilitas statis berdasarkan selang nilai B/D
Nilai B/D merupakan nilai perbandingan antara lebar badan kapal (breadth) dengan tinggi/dalam kapal (depth). Nilai rasio B/D berpengaruh terhadap stabilitas suatu kapal. Berikut ini disajikan grafik rentang stabilitas vanishing angle pada
0 0.2 0.4 0.6 0.8 1 1.2
LL 4 LL 5 LL 1 LL 3 PL GNT 1 TRN GNT 2 CR PU BL LL 2
U - bottom Round bottom Round flat bottomAkatsuki
bottom
Bentuk kasko kapal
GM (m)
GM
kondisi intact stability (IS) dan flooding angle pada kondisi un-intact stability (UIS) berdasarkan selang nilai B/D.
Gambar 21. Nilai vanishing angle kondisi ISdan flooding angle
kondisi UIS berdasarkan selang nilai B/D
Pada selang nilai B/D 1,90 – 2,54 kapal-kapal kelompok alat tangkap statis memiliki kisaran vanishing angle antara 94o – 143o dengan rata-rata sudut sebesar 118,33o pada kondisi intact stability. Sedangkan pada kondisi un-intact stability
memiliki nilai kisaran flooding angle antara 12o – 36o dengan rata-rata sudut sebesar 24,50o. Persentase perbedaan antara kedua kondisi tersebut mencapai 79 %. Hal ini berarti ada penurunan nilai dari kondisi intact stability ke kondisi un-intact stability
(kondisi sebenarnya) sebesar 93,83o. Untuk selang nilai B/D 2,55 – 3,19 nilai
vanishing angle-nya berkisar antara 31o – 128o pada kondisi intact stability dengan rata-rata sudut sebesar 90,25o dan nilai flooding angle-nya pada kondisi un-intact stability (kondisi sebenarnya) berkisar antara 9o – 28o dengan rata-rata sudut sebesar 20,25o. Dalam hal ini ada perubahan 78 % dari kondisi intact stability ke un-intact stability (kondisi sebenarnya) atau sebesar 70o. Adapun selang nilai B/D 3,20 – 3,84 memiliki nilai vanishing angle pada kondisi intact stability sebesar 84o dan pada kondisi un-intact stability (kondisi sebenarnya) nilai flooding angle-nya sebesar 23o serta persentase perubahannya 73 % atau sebesar 65o dari kondisi intact stability ke
Sudut oleng (derajat)
0 20 40 60 80 100 120 140 160
LL 4 LL 5 LL 1 TRN LL 3 PL GNT 2 GNT 1 LL 2 CR PU BL
1.90 - 2.54 2.55 - 3.19 3.20
-3.84 3.85
-4.49
Selang nilai B/D
kondisi sebenarnya (un-intact stability). Begitu juga untuk selang nilai B/D 3,85 m – 4,49 m memiliki nilai vanishing angle pada kondisi intact stability sebesar 89 o dan nilai flooding angle-nya pada kondisi un-intact stability bernilai 24o dengan persentase perubahannya dari kondisi intact stability ke un-intact stability (kondisi sebenarnya) 73 % atau sebesar 65o.
Berdasarkan pemaparan tersebut di atas dapat diketahui bahwa semakin besar selang nilai B/D, maka nilai vanishing angle pada kondisi intact stability dan flooding angle pada kondisi un-intact stability yang dihasilkan semakin menurun.
Sudut GZ maksimum merupakan sudut kemiringan kapal saat memiliki nilai lengan pengembali GZ terbesar. Sudut GZ maksimum pada kondisi intact stability
dan un-intact stability (kondisi sebenarnya) berdasarkan selang nilai B/D dapat disajikan pada Gambar 22 di bawah ini.
[image:45.612.136.513.351.554.2]
Gambar 22. Sudut GZ maksimumkondisi ISdan UIS berdasarkan selang nilai B/D
Sudut GZ maksimum untuk selang nilai B/D 1,90 – 2,54 pada kondisi intact stability berkisar antara 39o – 72o dengan rata-rata sudut sebesar 54,67o dan pada kondisi un-intact stability (kondisi sebenarnya)berkisar antara 12o – 36o dengan rata-rata sudut sebesar 24,50o. Persentase perubahannya antara kondisi intact stability
dengan un-intact stability mencapai 55 % atau terjadi perubahan sudut sebesar 30,17o
Sudut pada GZ maks (derajat)
0 10 20 30 40 50 60 70 80
LL 4 LL 5 LL 1 TRN LL 3 PL GNT 2 GNT 1 LL 2 CR PU BL
1.90 - 2.54 2.55 - 3.19 3.20
-3.84 3.85
-4.49
Selang nilai B/D
dari kondisi intact stability ke kondisi un-intact stability (kondisi sebenarnya). Pada selang nilai B/D 2,55 – 3,19 sudut pada GZ maksimumnya berkisar antara 14o – 64o pada kondisi intact stability dengan rata-rata sudut sebesar 45o, sedangkan pada kondisi un-intact stability memiliki kisaran antara 9o – 28o dengan rata-rata sudut GZ maksimum sebesar 20,25o. Persentase perubahannya mencapai 55 % atau mengalami perubahan sudut dari kondisi intact stability ke kondisi un-intact stability (kondisi sebenarnya) sebesar 24,75o. Untuk selang B/D 3,20 – 3,84 memiliki sudut pada GZ maksimum sebesar 48o pada kondisi intact stability dan 23o pada kondisi un-intact stability. Hal ini menunjukkan adanya penurunan sudut pada GZ maksimum dari kondisi intact stability ke un-intact stability (kondisi sebenarnya) sebesar 25o atau 52 %. Sama halnya untuk selang B/D 3,85 m – 4,49 m memiliki sudut pada GZ maksimum pada kondisi intact stability sebesar 39o dan pada kondisi un-intact stability sebesar 24o sehingga terjadi perubahan sudut pada GZ maksimum dari kondisi intact stability ke kondisi sebenarnya (un-intact stability) 38 % atau sebesar 15o.
Berdasarkan pemaparan tersebut di atas dapat diketahui bahwa semakin besar selang nilai B/D, maka nilai sudut pada GZ maksimum saat kapal dalam kondisi
intact stability dan un-intact stability yang dihasilkan semakin menurun.
Nilai GZ maksimum dari kondisi intact stability ke kondisi un-intact stability
Gambar 23. Nilai GZ maksimumkondisi ISdan UIS berdasarkan selang nilai B/D
Pada grafik di atas selang nilai B/D 1,90 – 2,54 memiliki kisaran nilai GZ maksimum pada kondisi intact stability 0,05 m – 0,87 m dengan rata-rata nilai GZ maksimum sebesar 0,49 m. Sedangkan pada kondisi un-intact stability nilai GZ maksimum berkisar antara 0,02 m – 0,46 m dengan rata-rata nilai GZ maksimum sebesar 0,28 m. Persentase perbedaannya 44 % atau terjadi perubahan nilai GZ maksimum dari kondisi intact stability ke kondisi sebenarnya (un-intact stability) sebesar 0,22 m. Pada selang nilai B/D 2,55 – 3,19 nilai GZ maksimum berkisar antara 0,04 m – 0,72 m pada kondisi intact stability dengan rata-rata nilai sebesar 0,36 m. Pada kondisi un-intact stability memiliki kisaran antara 0,04 m – 0,41 m dengan rata-rata nilai GZ maksimum sebesar 0,20 m. Persentase perubahannya dari kondisi intact stability ke un-intact stability 45 % atau sebesar 16 m. Untuk selang nilai B/D 3,20 – 3,84 memiliki nilai GZ maksimum pada kondisi intact stability sebesar 0,21 m dan pada kondisi un-intact stability sebesar 0,13 dengan. Persentase perubahannya 37 % atau sebesar 0,08 m dari kondisi intact stability ke un-intact stability (kondisi sebenarnya). Demikian juga untuk selang nilai B/D 3,85 – 4,49 memiliki nilai GZ maksimum pada kondisi intact stability sebesar 0,37 m dan pada kondisi un-intact stability sebesar 0,28 m dengan persentase perubahannya 24 % atau terjadi perubahan
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00
LL 4 LL 5 LL 1 TRN LL 3 PL GNT 2 GNT 1 LL 2 CR PU BL
1.90 - 2.54 2.55 - 3.19 3.20
-3.84 3.85
-4.49
Selang nilai B/D
Kondisi IS Kondisi UIS
nilai GZ maksimum dari kondisi intact stability ke kondisi un-intat stability sebesar 0,09 m.
Berdasarkan pemaparan tersebut di atas dapat diketahui bahwa semakin besar selang nilai B/D, maka nilai GZ maksimumsaat kapal dalam kondisi intact stability
dan un-intact stability yang dihasilkan semakin menurun.
Kapal-kapal kelompok alat tangkap statis yang diteliti memiliki dimensi utama kapal yang berbeda-beda. Perbedaan dimensi utama ini menyebabkan nilai GM pada setiap kapal juga berbeda. Nilai GM berdasarkan perbedaan selang nilai B/D dapat disajikan pada Gambar 24.
[image:48.612.117.504.287.471.2].
Gambar 24. Nilai GM berdasarkan selang nilai B/D
Dari grafik dapat dilihat nilai GM pada selang nilai B/D 1,90 – 2,54 berkisar antara 0,35 m – 1,01 m dengan rata-rata nilai GM sebesar 0,73 m. Nilai GM pada selang nilai B/D 2,55 – 3,19 berkisar antara 0,27 m – 0,96 m dengan rata-rata nilai GM sebesar 0,54 m. Untuk selang nilai B/D 3,20 – 3,84 dan selang nilai B/D 3,85 – 4,49 masing- masing memiliki nilai GM sebesar 0,38 m dan 0,39 m.
Berdasarkan pemaparan tersebut di atas dapat diketahui bahwa semakin besar selang nilai B/D, maka nilai GM yang dihasilkan semakin menurun.
Dari hasil kajian terhadap nilai- nilai parameter stabilitas statis berdasarkan perbedaan nilai B/D kapal diketahui bahwa nilai stabilitas statis cenderung menurun
GM (m)
0 0.2 0.4 0.6 0.8 1 1.2
LL 4 LL 5 LL 1 TRN LL 3 PL GNT 2 GNT 1 LL 2 CR PU BL
1.90 - 2.54 2.55 - 3.19 3.20
-3.84 3.85
-4.49
Selang nilai B/D
seiring dengan meningkatnya selang nilai B/D. Hal ini disebabkan karena adanya perbedaan nilai ton displacement pada masing- masing kapal. Pada umumnya, kapal dengan nilai B/D yang menghasilkan nilai parameter stabilitas statis yang kecil adalah kapal dengan bentuk round bottom dan round flat bottom.
4.2.3 Stabilitas statis berdasarkan ton displacement ( )
[image:49.612.93.515.404.649.2]Nilai ton displacement suatu kapal menggambarkan berat dari air yang dipindahkan ketika badan kapal terendam air hingga mencapai garis air (water line) tertentu. Besarnya ton displacement yang dimiliki oleh kapal-kapal kelompok alat tangkap statis berbeda satu sama lain. Perbedaan ini berpengaruh terhadap stabilitas statis suatu kapal. Pada Gambar 25 disajikan grafik hubungan antara selang ton displacement kapal kelompok alat tangkap statis dengan vanishing angle saat kapal dalam kondisi intact stability dan flooding angle saat kapal dalam kondisi un-intact stability.
Gambar 25. Nilai vanishing angle kondisi ISdan flooding angle
kondisi UIS berdasarkan selang ton displacement
Dari grafik di atas dapat dilihat untuk selang ton displacement 4,11 – 85,49 memiliki kisaran vanishing angle antara 31o – 143o pada kondisi intact stability
Sudut oleng (derajat) 0 20 40 60 80 100 120 140 160
BL CR TRN PU GNT 2 GNT 1 LL 1 LL 4 LL 5 LL 2 LL 3 PL
4.11 - 85.49 85.50
-166.88 166.89
-248.27 248.28
-329.66
Selang ton displacement (ton)
dengan rata-rata sudut sebesar 99,90o dan pada kondisi un-intact stability memiliki kisaran flooding angle antara 9o - 30o dengan rata-rata 22,70o. Persentase selisih perbedaannya 77 % atau sebesar 77,20o dari kondisi intact stability ke un-intact stability (kondisi sebenarnya). Untuk selang ton displacement 85,50 – 166,88 memiliki nilai vanishing angle pada kondisi intact stability sebesar 114o dan kondisi
un-intact stability yaitu pada flooding angle-nya sebesar 36o dengan persentase perbedaannya 68 % atau terjadi perubahan sudut dari kondisi intact stability ke kondisi sebenarnya (un-intact stability) sebesar 78o. Adapun untuk selang ton displacement 166,89 – 248,27 tidak memiliki nilai vanishing angle maupun flooding angle, karena kapal kelompok static gear yang menjadi obyek penelitian tidak ada yang memiliki nilai ton displacement antara selang tersebut. Untuk selang ton displacement 248,28 – 329,66 memiliki vanishing angle sebesar 131o pada kondisi
intact stability dan pada kondisi un-intact stability sebesar 12o yaitu pada flooding angle-nya. Persentase perbedaan selisihnya 91 % atau terjadi penurunan sudut sebesar 119o dari kondisi intact stability ke un-intact stability (kondisi sebenarnya).
Berdasarkan pemaparan tersebut di atas dapat diketahui bahwa semakin besar selang ton displacement, maka nilai vanishing angle pada kondisi intact stability dan
flooding angle pada kondisi un-intact stability yang dihasilkan juga semakin meningkat.
Gambar 26. Sudut GZ maksimum kondisi ISdan UIS
berdasarkan selang ton displacement
Sudut pada GZ maksimum untuk selang ton displacement 4,11 – 85,49 berkisar antara 14o – 72o pada kondisi intact stability dengan rata-rata sudut pada GZ maksimum sebesar 47,40o. Sedangkan pada kondisi un-intact stability memiliki kisaran sudut pada GZ maksimum antara 9o – 30o dengan rata-rata sudut 22,70o. Persentase perbedaan pada kedua kondisi tersebut 52 % atau terjadi penurunan sudut pada GZ maksimum dari kondisi intact stability ke un-inta