SISTEM PENGAMAN SEPEDA MOTOR BERBASIS MIKROKONTROLER ATMega 8535 MELALUI SHORT MESSAGE SERVICE (SMS)
SKRIPSI
JHON DALTON N
070801021
PROGRAM STUDI SARJANA FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
SISTEM PENGAMAN SEPEDA MOTOR BERBASIS MIKROKONTROLER ATMega 8535 MELALUI SHORT MESSAGE SERVICE (SMS)
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
JHON DALTON N
070801021
PROGRAM STUDI SARJANA FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
Judul : SISTEM PENGAMAN SEPEDA MOTOR BERBASIS MIKROKONTROLER ATMega 8535 MELALUI
SHORT MESSAGE SERVICE (SMS)
Kategori : SKRIPSI
Nama : JHON DALTON N Nomor Induk Mahasiswa : 070801021
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (MIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 09 Agustus 2011
Komisi Pembimbing : Diketahui
Departemen Fisika FMIPA USU Pembimbing Ketua,
PERNYATAAN
SISTEM PENGAMAN SEPEDA MOTOR BERBASIS
MIKROKONTROLER ATMega 8535 MELALUI SHORT
MESSAGE SERVICE (SMS)
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya
Medan, 09 Agustus 2011
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus yang telah memberikan kekuatan, petunjuk dan anugerah-Nya, sehingga penulis dapat menyelesaikan skripsi ini, dengan judul : “ Sistem Pengaman Sepeda Motor Berbasis Mikrokontroler ATMega 8535 Melalui Short Message Servise (SMS)”.
Penulis juga mengucapkan banyak terimakasih kepada :
1. Bapak Drs. Takdir Tamba M.Eng.Sc yang telah banyak memberikan bimbingan, motivasi, dan ide/masukan demi sempurnanya penyusunan skripsi ini.
2. Bapak Dr. Marhaposan Situmorang selaku ketua jurusan, dan Dra. Yustinon selaku sekretaris, Bapak Dekan FMIPA USU, beserta seluruh Civitas Akademika FMIPA USU.
3. Keluarga tercinta, khususnya kedua orang tua saya ( Ayahanda J. Nainggolan dan Ibunda H br.Silaban S.pd) atas kasih sayang, kerja kerasnya dalam mencukupi kebutuhan saya, serta doa dan motivasinya.
4. Kakak dan adik saya ( Eva Ferawati Nainggolan S.pd, Jefry Jungjungan Nainggolan, Hot Pahala Tua Nainggolan) atas doa dan dukugannya.
5. Nyta Ef Helzen Tampubolon, atas cinta dan kasih sayangnya, perhatian dan juga motivasinya yang selalu menemani dan mendukung saya dalam penyusunan skripsi ini.
6. Seluruh Keluarga Besar Op.Togar Halomoan Nainggolan yang memberikan doa dan saran beserta dukungannya.
7. Teman-teman seperjuangan Deddy, Jupento, Ricky, Ferdinand, Hugaini, Janry,Frisca, Fitry, Maryanto,July,Suci R, Natalia, Maria, Ita R,Eva R, Eva P, Christian, Martin,Yamanotona, Odaligo dan juga rekan stambuk 2007 yang lain yang tidak dapat saya sebutkan satu persatu, yang telah memberikan semangat dan motivasinya.
8. Senior dan Junior Jurusan Fisika FMIPA USU.
9. Teman-teman Seperjuangan di lingkungan PEMA FMIPA USU, dan juga teman-teman Ketua Ikatan Himpunan dan Jurusan Se-FMIPA USU yang telah memberikan masukan dan motivasi.
ABSTRAK
Sistem Pengaman Sepeda motor Berbasis Mikrokontroler ATMega 8535 melalui Short Message Service ( SMS )
Telah dilakukan perancangan sebuah alat sistem pengaman sepeda motor melalui SMS dengan menggunakan Handphone. Sebagai pusat pengendalian dari seluruh alat yang dirancang digunakan mikrokontroler ATMega 8535. Selain itu sistem yang dirancang dilengkapi dengan sensor magnet jenis UGN 3503 yang digunakan untuk mendeteksi perubahan posisi magnet yang dipasang pada sepeda motor,dan hasilnya akan dikirimkan ke mikrokontroler sebagi input yang kemudian akan diteruskan kepada modul GSM untuk dikirimkan dalam bentuk pesan singkat ke handphone penerima. Hasil pengamatan menunjukkan bahwa rancangan alat sistem pengaman sepeda motor ini telah berfungsi dengan baik.
ABSTRACT
Motorcycle Security System Microcontroller Based ATMega 8535 through the Short Message Service (SMS)
Has been done designing a motorcycle safety system equipment via SMS using mobile phones. As the central control of all tools that are designed to use a microcontroller ATMega 8535. Additionally equipped with systems designed magnet sensor type 3503 UGN used to detect changes in the position of a magnet mounted on the motorcycle, and the results will be sent to the microcontroller as a input that will then be forwarded to the GSM module to be delivered in the form of short messages to mobile receivers.
Observations showed that the design tool motorcycle safety system has been functioning properly.
DAFTAR ISI
Halaman
Persetujuan i
Pernyataan ii
Penghargaan iii
Abstrak iv
Abstract v
Daftar Isi vi
Daftar Tabel ix
Daftar Gambar x
BAB 1 PENDAHULUAN
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Tujuan 2
1.4 Manfaat Penelitian 2
1.5 Pembatasan Masalah 3
1.6 Sistematika Penulisan 3
BAB 2 LANDASAN TEORI
2.1 Mikrokontroler 5
2.1.1 Mikrokontroler ATMEGA 8535 5
2.1.2 Arsitektur Mikrokontroler ATMEGA 8535 8
2.1.3 Sistem Clock 8
2.1.4 Organisasi memori AVR ATMega 8535 9
A.Memori Data 9
B. Memori Program 10
2.2 Sensor 12
2.2.1 Pengetian Umum Sensor 12
2.2.2 Sensor Magnet ( UGN 3503) 13 2.2.3 Prinsip Kerja Sensor Magnet UGN 3503 14
2.3 Modul GSM 14
2.3.1 Modul GSM SIM 300C EVB 15
2.3.2 Interface RS232 17
2.3.3 Catu daya SIM 300C 18
2.3.4 Antena Interface 19
BAB 3 PERANCANGAN ALAT
3.1 Diagram blok Rangkaian 20
3.2 Rangkaian Power Supply 21
3.3 Rangkaian Mikrokontroler ATMEGA 8535 22 3.4 Rangkaian LCD ( Liquid Crystal Display) 24 3.5 Rangkaian Interface Komunikasi RS 232 25 3.6 Rangkaian Sensor Magnet UGN 3503 26 3.7 Flowchart ( Diagram Alir Program ) 29 BAB 4 HASIL DAN ANALISIS
4.1 Pengujian Alat 30
4.1.1 Langkah-langkah pengujian alat 31
4.1.2 Pengujian minimum sistem 31
4.1.3 Pengujian LCD 32
4.1.4 Pengujian LCD dan Sensor Magnet UGN 3503 33
4.1.5 Pengujian Buzzer 37
4.2 Analisis Pengujian 38
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan 40
5.2 Saran 40
DAFTAR TABEL
Halaman Tabel 2.1 Konfigurasi Data AVR ATMega 8535 10
Tabel 2.2 Main Interface RS232 18
Tabel 4.1 Hasil Pengujian LCD dan UGN 3503 36 Tabel 4.2 Data Pengukuran Tegangan Terhadap Jarak Magnet Dari
DAFTAR GAMBAR
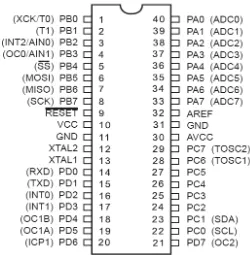
Halaman Gambar 2.1 Konfigurasi Pin Mikrokontroler ATMega 8535 7
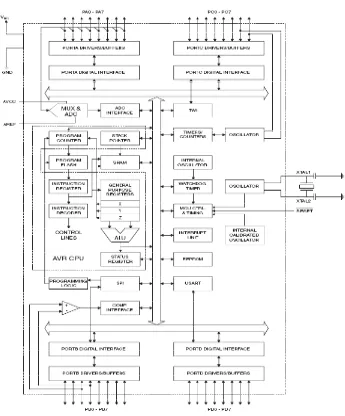
Gambar 2.2 Arsitektur ATMega 8535 8
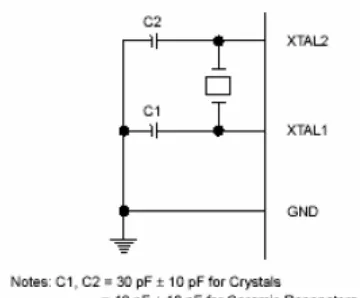
Gambar 2.3 Sistem Clock 9
Gambar 2.4 Memori Program ATMega 8535 11
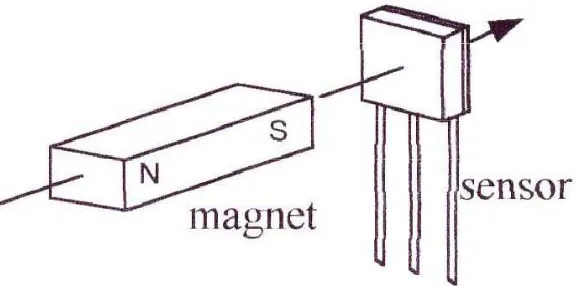
Gambar 2.5 Sensor magnet UGN 3503 13
Gambar 2.6 Ilustrasi Prinsip kerja Sensor Magnet UGN 3503 14
Gambar 2.7 Tampilan SIM 300C 15
Gambar 2.8 Rangkaian SIM 300C 16
Gambar 2.9 Tampilan fisik RS232 17
Gambar 2.10 Rangkaian Input VBAT 18
Gambar 2.11 Antena interface 19
Gambar 3.1 Diagram Blok Rangkaian 20
Gambar 3.2 Rangkaian Power Supply 21
Gambar 3.3 Rangkaian Mikrokontroler ATMega 8535 22 Gambar 3.4 Rangkaian skematik konektor yang dihubungkan dari
LCD ke mikrokontroler 24 Gambar 3.5 Rangkaian Komunikasi RS232 25
Gambar 3.6 Rangkaian Sensor Magnet 26
Gambar 4.1 Diagram Pengujian Alat 30
Gambar 4.2 Tampilan LCD 36
Gambar 4.3 Pengukuran Tegangan Terhadap jarak magnet dari sensor
ABSTRAK
Sistem Pengaman Sepeda motor Berbasis Mikrokontroler ATMega 8535 melalui Short Message Service ( SMS )
Telah dilakukan perancangan sebuah alat sistem pengaman sepeda motor melalui SMS dengan menggunakan Handphone. Sebagai pusat pengendalian dari seluruh alat yang dirancang digunakan mikrokontroler ATMega 8535. Selain itu sistem yang dirancang dilengkapi dengan sensor magnet jenis UGN 3503 yang digunakan untuk mendeteksi perubahan posisi magnet yang dipasang pada sepeda motor,dan hasilnya akan dikirimkan ke mikrokontroler sebagi input yang kemudian akan diteruskan kepada modul GSM untuk dikirimkan dalam bentuk pesan singkat ke handphone penerima. Hasil pengamatan menunjukkan bahwa rancangan alat sistem pengaman sepeda motor ini telah berfungsi dengan baik.
ABSTRACT
Motorcycle Security System Microcontroller Based ATMega 8535 through the Short Message Service (SMS)
Has been done designing a motorcycle safety system equipment via SMS using mobile phones. As the central control of all tools that are designed to use a microcontroller ATMega 8535. Additionally equipped with systems designed magnet sensor type 3503 UGN used to detect changes in the position of a magnet mounted on the motorcycle, and the results will be sent to the microcontroller as a input that will then be forwarded to the GSM module to be delivered in the form of short messages to mobile receivers.
Observations showed that the design tool motorcycle safety system has been functioning properly.
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Penggunaan Telepon selular di Indonesia khususnya di kota-kota besar sudah merupakan hal yang sangat umum. Dibandingkan dengan telepon rumah, telepon selular atau yang sering disebut dengan handphone jauh lebih praktis dari segi penggunaannya.Seiring dengan semakin berkembangnya teknologi telepon selular tersebut, telepon selular kini telah memiliki banyak fasilitas di dalamnya. Fasilitas-fasilitas tersebut seperti, dapat mengirimkan pesan singkat ( sms), radio, kamera,musik dan lain sebagainya dan harganya juga cukup terjangkau, sehingga masyarakat umum dapat memiliki telepon selular dengan mudah.
Dengan meningkatnya kebutuhan terhadap telepon selular dan banyaknya aplikasi yang terdapat di dalamnya, alangkah baiknya jika salah satu dari fasilitas tersebut kita gunakan sebagai alat pengaman. Setiap orang pasti menginginkan rasa aman baik terhadap dirinya dan juga semua harta benda yang dimiliki, misalnya dari masalah pencurian sepeda motor yang saat ini sering terjadi. Maka, untuk mengatasi masalah tersebut diperlukan suatu alat yang dapat menciptakan keamanan terhadap sepeda motor supaya terhindar dari pencurian.
Untuk melakukan semua itu penulis melakukan penelitian, sampai pada akhirnya penulis menemukan fungsi lain dari telepon selular tersebut yang dapat digunakan sebagai pengaman sepeda motor dengan menggunakan fasilitas Short Message Service (SMS) atau pesan singkat yang berbasis Mikrokontroller ATMega 8535.
Maka dari semua uraian di penulis tertarik untuk mengambil judul: “SISTEM PENGAMAN SEPEDA MOTOR BERBASIS MIKROKONTROLER
ATMega8535 MELALUI SHORT MESSAGE SERVICE (SMS) ” sebagai tugas
1.2 Rumusan Masalah
Berdasarkan uraian diatas,maka penulis merumuskan masalah yang terjadi saat ini adalah maraknya aksi pencurian sepeda motor, baik yang dicuri dari tempat-tempat parkir, bahkan ketika kita memarkirkan sepeda motor di depan rumah kita sendiri bisa hilang seketika dicuri oleh maling sepeda motor. Oleh karena itu, yang menjadi permasalahan sekarang adalah bagaimana cara merancang sebuah alat yang dapat menjaga keamanan sepeda motor dengan menggunakan Mikrokontroler ATMega8535 melalui short message service (SMS).
1.3 Tujuan
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah:
1. Memanfaatkan Mikrokontroller ATMega8535 dalam sistem pengaman sepeda motor.
2. Merancang sebuah alat sistem pengaman sepeda motor yang dapat memberikan informasi kepada pemilik sepeda motor melalui jarak jauh dengan menggunakan fasilitas yang terdapat pada telepon selular yaitu sistem short message service (sms).
1.4 Manfaat Penelitian
1.5 Pembatasan Masalah
Untuk membatasi masalah-masalah yang ada, maka penulis membatasi ruang lingkup masalah sebagai berikut:
1. Alat dirancang memanfaatkan Telepon selular GSM dan tidak membahas piranti-piranti dalam Telepon selular tersebut.
2. Sistem dalam pengiriman SMS ke telepon seluler pemilik sepeda motor sebagai sistem akusisi data berbasis SMS, yang dikirim melalui modul GSM sesuai dengan program yang diatur pada Mikrokontroller.
3. Alat yang dirancang adalah rangkaian Hardware sistem pengaman sepeda motor
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari alat sistem pengaman sepeda motor berbasis mikrokontoler ATMEGA8535 melalui short message service (SMS), maka penulis menulis skripsi ini dengan sistematika penulisan sebagai berikut:
BAB I PENDAHULUAN
Bab ini berisikan pendahuluan yang menjelaskan mengenai latar belakang, perumusan masalah, tujuan penulisan, batasn masalah serta sistematika penulisan.
BAB II LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan. Teori pendukung itu antara lain tentang Mikrokontroler
BAB III PERANCANGAN ALAT
Pada bab ini akan dibahas tentang perancangan alat, yaitu diagram blok dari rangkaian, skematik dan sistem kerja dari masing-masing rangkaian.
BAB IV HASIL DAN ANALISIS
Bab ini berisikan tentang pengujian alat dan juga analisis tugas akhir yang telah dibuat.
BAB V KESIMPULAN DAN SARAN
BAB 2
LANDASAN TEORI
2.1 Mikrokontroler
Mikrokontroller merupakan sebuah sistem komputer yang seluruh atau sebagian besar ele menya dikemas dalam satu chip IC, sehingga sering disebut Single Chip Microcomputer. Mikrokontroller merupakan sebuah sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dengan PC (personal computer) yang memiliki beragam fungsi. Perbedaan yang lainnya adalah perbandingan RAM dan ROM yang sangat berbeda antara komputer dengan mikrokontroller. Dalam mikrokontroller ROM jauh lebih besar dibandingkan RAM, sedangkan dalam komputer atau PC, RAM jauh lebih besar dibanding ROM.
Contoh- contoh keluarga mikrokontroller: 1. Keluarga MCS-51
2. Keluarga MC68HC05 3. Keluarga MC68HC11 4. Keluarga AVR 5. Keluarga PIC 8
Dalam perancangan alat ini, digunakan salah satu dari jenis mikrokontroller jenis AVR, karena mikrokontroller ini pemrogramannya relativ mudah dan harganya lebih murah.
2.1.1 Mikrokontroler ATMega 8535
Secara umum deskripsi mikrokontroler ATMega 8535 adalah sebagai berikut:
Port A berfungsi sebagai input analog pada A/D Konverter. Port A juga berfungsi sebagai suatu Port I/O 8-bit dua arah, jika A/DKonverter tidak digunakan. Pin - pin Port dapat menyediakanresistor internal pull-up (yang dipilih untuk masing-masing bit).Port A output buffer mempunyai karakteristik gerakan simetrisdengan keduanya sink tinggi dan kemampuan sumber. Ketika pinPA0 ke PA7 digunakan sebagai input dan secara eksternal ditarikrendah, pin – pin akan memungkinkan arus sumber jika resistor internal pull-up diaktifkan. Pin Port A adalah tri-stated manakalasuatu kondisi reset menjadi aktif, sekalipun waktu habis.
¾ Port B (PB7..PB0)
Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up (yang dipilih untuk beberapa bit). Port B output buffermempunyai karakteristik gerakan simetris dengan keduanya sinktinggi dan kemampuan sumber. Sebagai input, pin port B yangsecara eksternal ditarik rendah akan arus sumber jika resistor pullupdiaktifkan. Pin Port B adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
¾ Port C (PC7..PC0)
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up (yang dipilih untuk beberapa bit). Port C output buffermempunyai karakteristik gerakan simetris dengan keduanya sinktinggi dan kemampuan sumber. Sebagai input, pin port C yangsecara eksternal ditarik rendah akan arus sumber jika resistor pullupdiaktifkan. Pin Port C adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
¾ Port D (PD7..PD0)
¾ RESET (Reset input) ¾ XTAL1 (Input Oscillator)
¾ XTAL2 (Output Oscillator) AVCC adalah pin penyedia tegangan untuk port A dan A/D Konverter
¾ AREF adalah pin referensi analog untuk A/D konverter.
2.1.2 Arsitektur Mikrokontroler ATMega 8535
Gambar 2.2 Arsitektur mikrokontroler ATMega 8535
2.1.3 SISTEM CLOCK
Gambar 2.3 Sistem Clock
2.1.4Organisasi memori AVR ATMega8535
AVR ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Sebagai tambahan, ATmega8535memiliki fitur suatu EEPROM Memori untuk penyimpanan data. Semuatiga ruang memori adalah reguler dan linier. A. Memori Data
Memori data terbagi menjadi 3 bagian, yaitu 32 register umum,64 buah register I/O,dan 512 byte SRAM Internal.Register keperluan umum menempati space data pada alamatterbawah, yaitu $00 sampai $1F. Sementara itu, register khusus unutk
menangani I/O dan kontrol terhadap mikrokontroler menempati 64alamat berikutnya, yaitu mulai dari $20 hingga $5F. Register tersebutmerupakan register yang khusus digunakan untuk mengatur fungsiterhadap berbagai peripheral mikrokontroler, seperti kontrol register,timer/counter, fungsi – fungsi I/O, dan sebagainya. Register khususalamat memori secara lengkap dapat dilihat pada Tabel 2.2. Alamatmemori berikurnya digunakan untuk SRAM 512 byte, yaitu pada lokasi$60 sampai dengan $25F. Konfigurasi memori data ditunjukkan pada
Tabel 2.1 Konfigurasi Data AVR AT Mega 8535
B.Memori Program
Gambar 2.4 Memori Program AT Mega 8535
C. Port Sebagai Input / Output Digital
ATmega8535 mempunyai empat buah port yang bernama PortA, PortB, PortC, dan PortD. Keempat port tersebut merupakan jalur bi-directional dengan pilihan internal pull-up. Tiap port mempunyai tiga buah register bit, yaitu DDxn, PORTxn, dan PINxn. Huruf ‘x’ mewakili nama huruf dari port sedangkan huruf ‘n’ mewakili nomor bit. Bit DDxn terdapat pada I/O address DDRx, bit PORTxn terdapat pada I/O address PORTx, dan bit PINxn terdapat pada I/O address PINx. Bit DDxn dalam regiter DDRx (Data Direction Register) menentukan arah pin. Bila DDxn diset 1 maka Px berfungsi sebagai pin output. Bila DDxn diset 0 maka Px berfungsi sebagai pin input. Bila PORTxn diset 1 pada saat pin terkonfigurasi
pull-up enabled dapat diterima sepenuhnya, selama lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high driver dengan sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset 1 untuk mematikan semua pull-up dalam semua port. Peralihan dari kondisi input dengan pull-up ke kondisi output low juga menimbulkan masalah yang sama. Maka harus menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1, PORTxn=0) sebagai kondisi transisi. Lebih detil mengenai port ini dapat dilihat pada manual datasheet dari IC ATmega8535.
2.2 SENSOR
2.2.1 Penegertian Umum sensor
Secara umum sensor didefenisikan sebagai alat yang mampu menangkap fenomena fisika atau kimia kemudian mengubahnya menjadi sinyal elektrik baik arus listrik ataupun tegangan. Fenomena fisik yang mampu menstimulus sensor untuk menghasilkan sinyal elektrik meliputi temperature, tekanan, gaya, medan magnet, cahaya dan sebagainya. Secara garis besar sensor dibagi menjadi dua bagian, yaitu:
a. Sensor kimia b. Sensor fisika
Sensor kimia adalah sensor yang mendeteksi jumlah suatu zat kimia dengan cara mengubah besaran kimi menjadi besaran listrik. Biasanya ini melibatkan beberapa reaksi kimia. Yang termasuk kedalam jenis sensor kimia yaitu : - Sensor PH
- Sensor Gas - Sensor oksigen - Sensor Ledakan
2.2.2 Sensor Magnet ( UGN 3503)
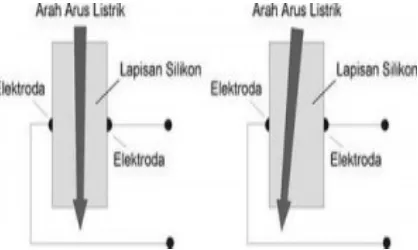
Sensor Magnet merupakan sensor yang digunakan untuk mendeteksi medan magnet. Sensor Magnet akan menghasilkan sebuah tegangan yang proporsional dengan kekuatan medan magnet yang diterima oleh sensor tersebut.Sensor magnet ini hanya terdiri dari sebuah lapisan silikon dan dua buah elektroda pada masing-masing sisi silikon. Pada saat tanpa ada pengaruh dari medan magnet maka beda potensial antar kedua elektroda tersebut 0 Volt karena arus listrik mengalir ditengah kedua elektroda. Ketika terdapat medan magnet mempengaruhi sensor ini maka arus yang mengalir akan berbelok mendekati/menjauhi sisi yang dipengaruhi oleh medan magnet. Hal ini menghasilkan beda potensial diantara kedua elektroda dari Sensor Magnet, dimana beda potensial tersebut sebanding dengan kuat medan magnet yang diterima oleh Sensor Magnet ini.
Gambar 2. 5 Sensor Magnet UGN 3503
2.2.3 prinsip Kerja Sensor Magnet UGN 3503
Sensor magnet dapat merespon medan magnet yang terdapat disekitarnya. Sensor ini mempunya 3 pin. Apabila tidak ada magnet disekitar (dekat) sensor tersebut, maka tegangan outputnya sama dengan setengan tegangan supply.
Jika ada kutub selatan sebuah magnet berada di dekat sensor tersebut, maka tegangan output naik. Jadi, besarnya kenaikan tegangan output secara proporsional tergantung dari pada kekuatan medan magnet yang ada. Jika ada kutub utara sebuah magnet berada di sekitar sensor tersebut, maka tegangan output akan turun.
Gambar 2.6 Ilustrasi Prinsip Kerja Sensor Magnet UGN 3503
2.3 MODUL GSM
Modul GSM adalah sebuah perangkat yang menawarkan layanan transit SMS, mentransformasikan pesan ke jaringan selular dari media lain, atau sebaliknya, sehingga memungkinkan pengiriman atau penerimaan pesan SMS dengan atau tanpa menggunakan ponsel.
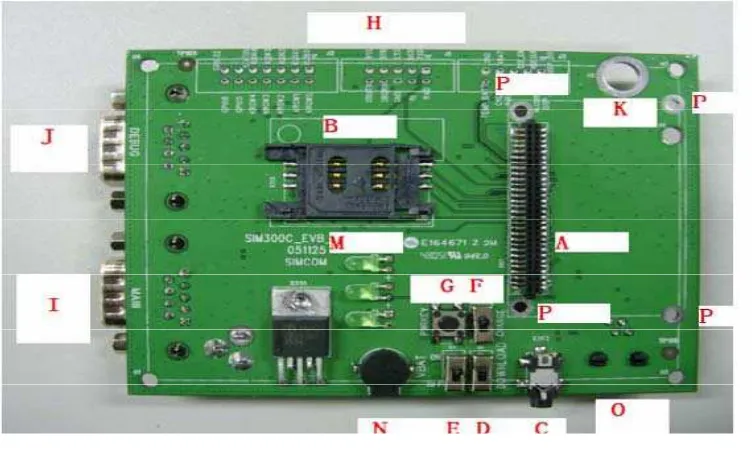
2.3.1 Modul GSM SIM 300C EVB
SIMCOM menawarkan informasi ini sebagai layanan kepada pelanggan, untuk mendukung upaya aplikasi dan rekayasa yang menggunakan produk SIMCOM. Informasi yang diberikan didasarkan pada kebutuhan khusus disediakan untuk SIMCOM oleh pelanggan. SIMCOM belum dilakukan setiap pencarian independen untuk informasi tambahan yang relevan, termasuk informasi yang mungkin dimiliki pelanggan. Selanjutnya, sistem validasi produk ini SIMCOM dalam sistem elektronik yang lebih besar tetap menjadi tanggung jawab dari pelanggan atau system integrator pelanggan. Semua spesifikasi yang diberikan di sini dapat berubah.
Dirancang untuk pasar global, SIM300C adalah Tri-band GSM / GPRS mesin yang bekerja pada frekuensi jaringan EGSM 900 MHz, DCS 1800 MHz dan PCS1900 MHz.SIM300C menyediakan GPRS multi-slot kelas 10 / class8 (opsional) kemampuan dan mendukung pengkodean GPRS skema CS-1, CS-2, CS-3 dan CS-4. Dengan konfigurasi kecil 50mm x 33mm x 6.2mm, SIM300C dapat cocok hampir semua kebutuhan ruang dalam aplikasi industri, seperti M2M, dan mobile data dll.
Untuk menghidupkan sistem SIM300C dapat dilakukan dengan cara: Hubungkan modul SIM300C ke konektor 60pins pada SIM300C EVB,
memasukkan adaptor 5V sumber langsung saat ini, beralih saklar S1 pada keadaan off, saklar S2 pada keadaan ON
Tekan PWRKEY sekitar 1 detik, dan kemudian modul SIM300C mulai berjalan. Anda dapat melihat lampu di EVB berkedip pada frekuensi tertentu. Oleh negara, Anda dapat menilai apakah EVB dan SIM300C dapat menjalankan atau tidak. Tidak ada fungsi dan pengujian dapat dijalankan ketika kita tidak terhubung aksesoris yang diperlukan.
Untuk mematikan SIM300C dapat dilakukan dengan cara:
Matikan modul SIM300C: tekan PWRKEY selama sekitar 1 detik, modul SIM300C akan dimatikan.
RESET: ketika darurat terjadi, modul tidak dapat dimatikan dan dihidupkan oleh PWRKEY, kemudian tekan tombol RESET dan melepaskannya, SIM300C akan reset
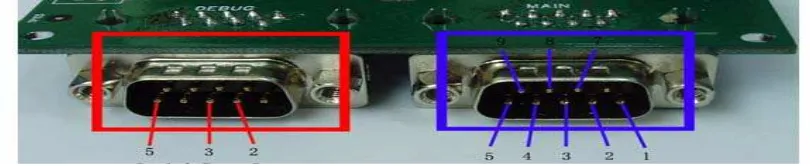
2.3.2 Interface RS232
Gambar 2.9 Tampilan Fisik RS232
berbeda, ini tidak mungkin benar. UNTUK +12 volt menunjukkan "ON” sedangkan A -3 hingga -12 volt menunjukkan "OFF". Peralatan komputer modern mengabaikan tingkat negatif dan menerima tingkat tegangan nol. Bahkan, keadaan "ON" dapat dicapai dengan potensi positif yang lebih rendah. Sirkuit Ini berarti didukung oleh 5 VDC mampu mengemudi sirkuit RS232 secara langsung, bagaimanapun, rentang keseluruhan bahwa sinyal RS232 dapat dikirim / diterima dapat dikurangi secara dramatis.
Tabel 2.2 Tabel Main Interface RS232
PIN SIGNAL I/O DESCRIPTION
1 DCD O Data Carrier Descripition
2 TXD O Transmit Data
3 RXD I Receive Data
4 DTR I Data Terminal Ready
5 GND Ground
7 RTS I Repair to Send
8 CTS O Clear to Send
9 RI O Ring Indikator
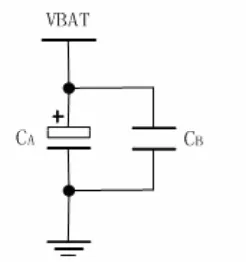
2.3.3 Catu daya SIM300C
Gambar 2.10 Rangkaian Input VBAT
turun ketika konsumsi saat ini naik ke puncak khas 2A. Jadi catu daya harus mampu menyediakan arus yang cukup sampai 2A.
Untuk input VBAT, kapasitor bypass lokal dianjurkan. Sebuah kapasitor (sekitar 100µF, ESR yang rendah) dianjurkan. Multi-lapisan keramik chip (MLCC) kapasitor dapat memberikan kombinasi terbaik ukuran ESR dan kecil rendah tetapi mungkin tidak efektif biaya. Sebuah pilihan biaya yang lebih rendah mungkin 100 µF kapasitor tantalum (ESR yang rendah) dengan (0,1 µF untuk 1µF) kecil keramik secara paralel, yang digambarkan sebagai gambar berikut. Dan kapasitor harus ditempatkan sebagai dekat mungkin ke pin VBAT SIM300C.
SIM300C ini dirancang dengan teknik penghematan daya, konsumsi saat ini untuk serendah 2.5mA dalam mode SLEEP. SIM300C ini terintegrasi dengan protokol TCP / IP, diperpanjang TCP / IP perintah AT dikembangkan bagi pelanggan untuk menggunakan protokol TCP / IP dengan mudah, yang sangat berguna untuk aplikasi transfer data.
2.3.4 Antena Interface
Gambar 2.11 Antena Interface
BAB 3
PERANCANGAN ALAT
3.1 Diagram Blok Rangkaian
Diagram blok merupakan gambaran dasar dari rangkaian sistem yang akan dirancang. Setiap diagram blok mempunyai fungsi masing-masing. Adapundiagram blok dari sistem yang dirancang adalah seperti yang diperlihatkan pada gambar 3.1 berikut ini :
• Pin 33 sampai 40 adalah port A yang merupakan port ADC, dimana port ini dapat menerima data analog. Pin ini terhubung langsung dengan sensor magnet UGN 3503. Ketika sensor mendeteksi adanya pergerseran pada magnet yang dipasang pada sepeda motor, maka yang dulunya status sensor adalah hingh (1) akan berubah menjadi low (0) akibat adanya pergeseran magnet. Perubahan status dari high ke low ini akan dikirimkan oleh sensor ke Mikrokontroler sebagai input.
• Pin 1 sampai 8 adalah port B. Pin 6 sampai pin 8 terhubung ke AVR ISP, dimana AVR ISP adalah sebagai konektor Downloader ISP yaitu yang berfungsi untuk mengisi program ke dalam mikrokontroler. Sedangkan Pin 1 sampai pin 5 terhubung ke buzzer yang berfungsi sebagai indikator suara. Ketika sensor mendeteksi adanya pergeseran pada magnet, maka Oleh mikrokontroler akan mengaktifkan buzzer.
• Pin 22 sampai pin 29adalah port C. Pin ini terhubung langsung ke Display LCD yang berfungsi untuk menampilkan karakter yang dikirimkan oleh mikrokontroler. Pada LCD ini sudah terdapat Driver untuk mengubah data ASCII output dari Mikrokontroler menjadi karakter.
• Dan pin 14 sampai dengan pin 22 adalah port D. Dalam perancangan alat ini pin 14 dan 15 terhubung ke IC MAX 232N, IC ini berfungsi sebagi interface data dari mikrokontroler ke Modul GSM melalui Interface RS 232. Sedangkan Pin 20 dan 21 terhubung ke Push buttom.Dalam rangkaian ini terdiri digunakan dua buah pushbuttom. Push buttom 1 berfungsi sebagai penghubung antara mikrokontroler dengan modul GSM supaya dapat berkomunikasi dalam pengiriman data. Sedangkan Push buttom 2 berfungsi sebagai tombol manual untuk mengakhiri proses kerja seluruh rangkaian.
DB7
perintah tertentu. Sehingga, apabila bila kita menginginkan mikrokontroler dapat mengeksekusi suatu perintah dengan cepat atau sesuaia dengan yang kita inginkan makan kita gunakanlah mikrokontroler yang sesuai.
Pada pin 9 dihubungkan dengan sebuah kapasitor dan sebuah resistor yang dihubungkan ke ground. Kedua komponen ini baik antara kapasitor dan resistor berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada IC mikrokontroler dan aktifnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut.
3.4 Rangkaian LCD ( Liquid Crystal Display)
Rangkaian skematik konektor yang dihubungkan dari LCD ( Liquid Crystal Display) ke mikrokontroller dapat dilihat dalam gambar dibawah ini:
Gambar 3.4 Rangkaian Skematik Konektor yang dihubungkan dari
LCD ke Mikrokontroler
1
Sedangkan pin 1 dan 2 dihubungkan ke power supply sebagi sumber tegangan 5 Volt Dc dan Ground.
3.5 Rangkaian Interface Komunikasi RS232
Gambar 3.5 Rangkaian Komunikasi RS232
Dalam Rangkaian di atas terdapat IC MAX232 N dan RS232 DB9/Male, kedua komponen ini berfungsi dalam interface komunikasi antara Mikrokontroler ATMega 8535 dengan Modul GSM. Untuk Mengirimkan data dari mikrokontroler ke modul GSM dibutuhkan suatu komunikasi data, dalam hal ini digunakan komunikasi serial. Untuk melakukan komunikasi itu digunakan IC MAX232 dan RS232. Pin 9 dan 10 IC MAX232 terhubung ke port Do dan PD1 Mikrokontroler ATMega 8535. Melalui port inilah mikrokontroler akan mengirim data ke ICMAX 232 yang kemudian melalui interface RS232 akan dikimkan ke modul GSM dalam bentuk teks.
3.6 Rangkaian Sensor Magnet UGN 3503
Gambar 3.6 Rangkaian Sensor Magnet
Untuk menjalankan program yang telah tersimpan pada mikrokontroler maka hal ini tidak terlepas dari kerja sensor. Dalam hal ini sensor yang kita gunakan adalah UGN 3503 sebanyak dua buah yaitu sensor depan dan sensor belakang, kedua sensor ini serta magnet dipasang pada bagian sepeda motorn yaitu:
• Stang sepeda motor ( sensor Depan)
• Roda sepeda motor ( Sensor Belakang)
Sama seperti penempatan sensor pada stang sepeda motor, penempatan sensor pada bagian roda dilakukann kerena ketika sepeda motor akan dicuri maka tentu sekali roda sepeda motor harus berputar. Pada magnet dipasang pada roda kendaraan dan sensor dipasang pada bagian tertentu yang akan dilewati oleh magnet ketika roda berputar. Ketika Sensor dan magnet saling berdekatan maka status sensor dalam kondisi high(1). Ketika roda diputar, maka magnet akan melewati sensor dan menjauhi sensor, sehingga status sensor akan berubah menjadi low (0). Perubahan status dari high (1) menjadi low (0) akan dikirimkan ke mikrokontroler sebagai output dari sensor belakang.
Output dari sensor ini akan dihubungkan dengan mikrokontroler pada port A, yaitu ADC0 dan ADC1. Dengan demikian, ketika terjadi pergeseran pada magnet yang menyebabkan perubahan status sensor dari high ke low, maka data ini akan dikimkan ke Mikrokontroler sebagai input dan dapat menampilkanya pada display LCD.
Proses pengiriman data dari Mikrokontroler hingga akhirnya sampai pada Handphone penerima adalah sebagai berikut:
¾ Ketika Mikrokontroler menerima Input dari sensor depan yaitu dalam keadaan low (0), maka mikrokontroler akan mengeksekusi perintah yang telah disetting pada program ketika kondisi sensor depan Low yaitu:
{'A','T','+','C','M','G','S','=''.','.','.',' ','k','u','n','c','i',' ','s','t','a','n','g','
','d','i','l','e','p','a','s','k','a','n',' ',' ','.','.','.','.',26};
¾ Demikian juga halnya dengan sensor belakang. Ketika Mikrokontroler menerima input dari sensor belakang dalam keadaan low (0), maka mikrokontroler akan mengeksekusi perintah
yang telah disetting pada program ketika kondisi sensor belakang dalam keadaan low,
yaitu:
{'A','T','+','C','M','G','S','='.','.','.',' ','r','o','d','a',' ','k','e','n','d','e','r','a','a','n','
¾ Setelah data dikirim dari Mikrokontroler ke modul GSM melalui interface komunikasi RS232, maka modul GSM akan mengirimkan data tersebut dalam bentuk teks ke
handphone penerima. Teks tersebut dalam bentuk sebagai berikut:
1. Jika input Mikrokonroler berasal dari sensor depan maka format pesan yang
sampai ke handphone penerima adalah “...kunci stang dilepaskan”
2. Jika input Mikrokontroler berasaln darin sensor belakang maka format pesan yang
sampai ke handphone penerima adalah “...roda kendaraan berputar”
¾ Supaya data yang diterima modul GSM dari mikrokontroler tidak menumpuk sampai banyak maka setelah pesan sampai ke Handphone penerima maka mikrokonroler akan mengeksekusi perintah yang telah diatur pada sebelumnya pada program yaitu:
3.7 Flow Chart ( Diagram Alir Program)
BAB 4
HASIL DAN ANALISIS
Untuk mengetahui apakah alat yang telah dirancang dapat berjalan sesuai dengan fungsi yang diharapkan maka diperlukan adanya pengujian alat untuk tiap-tiap blok. Pada bab ini dijelaskan percobaan yang telah dilakukan untuk mengetahui respon dari kerja alat yang telah dirancang.
Sebelum melakukan pengujian alat terlebih dahulu menyiapkan peralatan yang dibutuhkan serta menyusun peralatan yang akan diuji. Adapun alat yang akan diuji secara keseluruhan dapat dilihat pada gambar 4.1. Sementara urutan langkah pada proses pengujian alat adalah sebagai berikut:
• Menghubungkan Modul GSM dengan alat yang akan diuji. • Melakukan proses pengujian alat
• Menganalisis hasil pengujian
Gambar 4.1 Diagram pengujian alat
4.1 Pengujian Alat
Untuk mengetahui apakah rangkaian yang telah dirancang dapat berfungsi dan terhubung dengan baik serta sesuai dengan rancangan yang dibuat maka perlu dilakukan pengujian alat secara keseluruhan. ( Gambar Rangkaian secara keseluruhan terlampir pada lampiran 2)
SEPEDA MOTOR HANDPHONE
4.1.1 Langkah-langkah pengujian alat
1. Setelah program dibuat dan telah diisikan ke dalam mikrokontroler dan semua rangkaian telah terhubung dengan baik dan s ensor juga telah dalam keadaan normal maka hubungkan rangkaian ke sumber tegangan melalui adaptor untuk menghidupkan dan mengaktifkan sistem/rangkaian.
2. Tekan tombol 1 yang ada pada rangkaian, tujuannya supaya rangkaian danModul GSM dapat berkomunikasi dalam pengiriman data.
3. Gerakkan stang sepeda motor ataupun roda sepeda motor untuk mengetahui respon dari sensor yang telah terpasang pada stang dan juga roda sepeda motor.
4. Alarm akan berbunyi.
5. Modul GSM yang terhubung pada rangkaian akan mengirim pesan atau SMS ke nomor tujuan atau ke handphone penerima yang telah di setting pada program.
4.1.2 Pengujian Minimum Sistem
Pada pengujian minimum sistem ini dilakukan percobaan yang sifatnya sederhana tapi dapat menunjukkan bekerja tidaknya minimum sistem tersebut. Percobaan tersebut adalah untuk menghidupkan beberapa buah LED sebagai indikator apakah sistem sudah berjalan atau aktif.
Percobaan ini dilakukan pada I/O port ( Port A). Untuk menghidupkan LED tersebut digunakan program berikut:
While (1) {
// Place your code here PORTA = 240
}; }
Jika program tersebut dijalankan maka LED akan hidup dan mati secara berulang-ulang yang artinya sistem sudah aktif dan dapat dioperasikan, hal ini terlihat pada program yaitu PORT A=240 yang artinya jika angka 240 kita ubah ke bilangan biner menjadi 0000 1111. Bilangan ini menandakan LED akan hidup semua dan kemudian akan kembali mati secara berulang-ulang.
4.1.3 Pengujian LCD
Selain percobaan I/O port ( Port A) juga dilakukan percobaan terhadap LCD. Pada tahap ini dilakukan percobaan untuk mengaktifkan LCD System. Pengkatifan LCD ini dilakukan dengan cara menampilkan beberapa karakter pada LCD.
Untuk menampilkan beberapa karakter tersebut digunakan listing program sebagai berikut ini:
While (1) {
// Place your code here While(normal==0) {
Lcd_gotoxy (0,0);
Lcd_puts(buf);
Delay_ms(1000); Lcd_clear(); };
}
Jika program tersebut dijalankan maka pada layar LCD akan tampil ‘buffer 000 NORMAL MODE’ pada koordinat x=0 dan pada koordinat y=0. Hal ini menunjukkan bahwa minimum System dan LCD dapat berjalan dengan baik.
4.1.4 Pengujian LCD dan Sensor Magnet UGN 3503
Pengujian berikutnya adalah, dengan cara menghubungkan sensor UGN 3503 ke PORTA.0. Selanjutnya kita akan melihat tampilannya pada LCD, artinya ketika sensor mendeteksi adanya pergerseran pada magnet maka secara otomatis hasil dari pendeteksian tersebut akan memberi perintah kepada mikrokontroler untuk melakukan perintah yang telah diatur pada program dan hasilnya dapat ditampilkan pada LCD.
Programnya sebagai berikut: While(1)
{
//Place your code here lcd_gotoxy(x,1);
sprintf(buf,"%c",berita[x+21]); lcd_puts(buf);
}
{
led_stang = 0; }
if (sensor_belakang == 0) {
led_roda = 0; }
delay_ms(500);
while(normal == 1) {
if (sensor_belakang == 1) {
delay_ms(250); lcd_gotoxy(0,1); lcd_putsf(" "); kirim_lagi = 0; roda_berputar();
intruder = 1; }
if (sensor_depan == 1) {
kunci_stang_lepas(); intruder = 1; }
lcd_gotoxy(0,0);
lcd_putsf("T2 - normal opr."); if (sensor_depan == 0)
{
led_stang = 1; }
if (sensor_belakang == 0) {
led_roda = 1; }
delay_ms(500);
lcd_gotoxy(0,0); lcd_putsf(" ");
if (sensor_depan == 0) {
led_stang = 0; }
if (sensor_belakang == 0) {
}
delay_ms(500); lcd_clear(); };
}
Program diatas akan membaca nilai dari PORTA.0 yang dihubungkan ke sensor magnetn UGN 3503 dengan perintah yang diatur pada program. Dengan perintah tersebut maka data akan dimasukkan ke dalam sebuah variabel dan selanjutnya akan diubah ke bentuk desimal dengan perintah sprintf (buf,”%c”,berita[x+12]);
Kemudian akan ditampilkan pada LCD pada koordinat x=0dan y=1melalui perintah lcd_gotoxy(x,1); lcd_puts(buf).
Dari pengujian LCD dan UGN 3503 diatas maka akan didapatkan data sebagai berikut: Tabel 4.1 Hasil Pengujian LCD dan UGN 3503
GERAKAN TERDETEKSI SENSOR TAMPILAN PADA LCD
Sensor Depan T2-normal opr....Kunci Stang dilepas Sensor Belakang T2-normal opr...Roda kendaraan berputar
4.1.5 Pengujian Buzzer
Pada pengujian ini, kita akan melihat apakah buzzer bekerja dengan baik. Dimana buzzer ini akan bekerja ketika sensor mendeteksi adanya gerakan pada magnet maka buzzer akan langsung berbunyi. Oleh sebab itu dilakukan pengujian pada buzzer dengan program sebagai berikut
if (intruder == 1) {
buzzer = 1; delay_ms(100); buzzer = 0; delay_ms(400); buzzer = 1; delay_ms(300); buzzer = 0; delay_ms(200); }
} }; }
4.2 Analisis Pengujian
4.2.1 Pengukuran Tegangan Terhadap Jarak Magnet dari Sensor
Gambar 4.3 Pengukuran tegangan terhadap jarak magnet dari sensor dengan
menggunakan multimeter digital
Berdasarkan pengukuran yang dilakukan, besarnya perubahan tegangan keluaran sensor terhadap jarak magnet yang berbeda-beda, maka data yang diperoleh dapat disajikan dalam bentuk tabel sebagai berikut ini:
Tabel 4.2 Data Pengukuran Tegangan Terhadap Jarak Magnet Dari Sensor
Jarak (cm) Tegangan (Volt)
Gambar 4.4 Grafik Hubungan Jarak Vs Tegangan
Dari Tabel 4.2 dan gambar 4.2 dapat kita ketahui bahwa semakin besar jarak antara magnet dengan sensor maka tegangan keluaran (Vout) yang dihasilkan semakin kecil, artinya jarak dan tegangan berbanding terbalik. Berdasarkan data diatas terlihat bahwa pada jarak 0-2 cm perubahan tegangan keluaran pada sensor sangat besar, sedangkan pada jarak 2 cm sampa 5 cm perubahan tegangan keluaran sensor cenderung lebih stabil atau konstan hal ini disebabkan oleh pengaruh polaritas (Kutub) magnet yang lebih teratur.
0 1 2 3 4 5 6
4.5 3.2 2.9 2.8 2.7 2.5
Jarak ( Cm)
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil penelitian ini maka dapat ditarik kesimpulan sebagai berikut:
1. Berdasarkan data dan analisis yang didapat dari perancangan alat dengan menggunakan mikrokontroler ATMega 8535, alat sistem pengaman sepeda motor dapat berfungsi dengan baik.
2. Telah berhasil dirancang sebuah alat pengaman sepeda motor dengan menggunakan fasilitas telepon selular yaitu melalui short message service (SMS) yang memungkinkan pemilik sepeda motor dapat mengetahui keadaan sepeda motornya dari jarak jauh.
5.2 Saran
1. Dari alat yang telah dirancang dan telah dilakukan pengujian disarankan untuk pengembangan selanjutnya, misalya penggunaan sensor yang lain untuk mendapatkan sensitivitas yang lebih baik.
2. Pastikan bahwa nomor telepon atau kartu GSM yang terpasang pada modul GSM memiliki pulsa yang cukup untuk melakukan pengiriman SMS.
DAFTAR PUSTAKA
Bejo, Agus. 2007. C&AVR “Rahasian Kemudahan Bahasa C Dalam Mikrokontroler ATMega8535”. Graha Ilmu: Yogyakarta.
Budihartono, Widodo. 2006. Belajar Sendiri Membuat Robot Cerdas. Elex Media Komputindo: Jakarta.
Gunawan , Ferry. 2003. Membuat Aplikasi Gateway server dan Client dengan Java dan PHP. Elex Media Komputindo: Jakarta.
Roden, Martin.1982. Digital and Data Communication System. PrenticeHall: California. Wardana, Lingga. 2006. Belajar Sendiri Mikrokontroler AVR ATMega8535, Simulasi
Hardware Dan Aplikasi. Penerbit Andi : Yogyakarta.
Winoto, Ardi. 2008. Mikrokontroler AVR ATMega8/32/16/8535 Dan
Pemrogramannya Dengan Bahasa C Pada WinAVR. Penerbit Informatika : Cirebon.
http://www.atmel.com
http://elektroarea.blogspot.com/2009/01/sensor-sensor -adalah-peralatan-yang.html 15 Juni 2011 15.00WIB
http://belajar-elektronika.com/tranducersensor/sensor-magnet-UGN 3503/ 15 Juni 2001 15.25 WIB
http://www.scribd.com/doc/23350279/gsmmodule 15 Juni 2011 16.05 WIB
LAMPIRAN I
PROGRAM DI MIKROKONTROLER ATMEGA 8535
*****************************************************
This program was produced by the
CodeWizardAVR V2.03.4 Standard
Automatic Program Generator
© Copyright 1998-2008 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 5/24/2011
Author :
Company :
Comments:
Chip type : ATmega8535
Program type : Application
Clock frequency : 7.372800 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 128
*****************************************************/
#include <mega8535.h>
#define led_roda PORTD.7
#define led_stang PORTD.6
#define sensor_depan PINA.0
#define sensor_belakang PINA.1
#define buzzer PORTB.0
unsigned char buf[33];
unsigned int ready_tick;
unsigned char iy, dly;
unsigned char berita[100];
unsigned char no_echo[7] = {'A','T','E','0',13,10};
unsigned char no_hp[29]= {'A','T','+','C','M','G','S','=','"','0','8','5','6','5','8','5','4','5','0','7','3','"',13,10};
unsigned char cmgd_sms[15] = {'A','T','+','C','M','G','D','=','1',13,10}; // hapus sms yang ada
unsigned char roda_digeser[35]={'.','.','.',' ','r','o','d','a',' ','k','e','n','d','e','r','a','a','n',' ','b','e','r','p','u','t','a','r',' ','.','.','.','.',26};
unsigned char kunci_stang[35] ={'.','.','.',' ','k','u','n','c','i',' ','s','t','a','n','g',' ','d','i','l','e','p','a','s','k','a','n',' ',' ','.','.','.','.',26};
bit normal, manual, intruder, kirim_lagi;
// Alphanumeric LCD Module functions
#asm
#endasm
#include <lcd.h>
// External Interrupt 0 service routine
interrupt [EXT_INT0] void ext_int0_isr(void)
{
// Place your code here
normal = 1;
manual = 0;
intruder = 0;
buzzer = 0;
delay_ms(50);
}
// External Interrupt 1 service routine
interrupt [EXT_INT1] void ext_int1_isr(void)
{
// Place your code here
manual = 1;
normal = 0;
buzzer = 0;
intruder = 0;
delay_ms(50);
}
// Standard Input/Output functions
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
// Place your code here
dly++;
if ((dly == 100) & (intruder == 1))
{
buzzer = ! buzzer;
dly = 0;
}
}
// Timer 2 overflow interrupt service routine
interrupt [TIM2_OVF] void timer2_ovf_isr(void)
{
// Place your code here
// ready_tick++;
}
// Declare your global variables here
void kirim_perintah_no_echo (void)
{
unsigned char ix, kar;
for (ix = 0; ix < 12; ix++)
kar = no_echo[ix];
putchar(kar);
if (kar == 10) break;
}
}
void hapus_sms (void)
{
unsigned char ix, kar;
for (ix = 0; ix < 20; ix++)
{
kar = cmgd_sms[ix];
putchar(kar);
if (kar == 10) break;
}
delay_ms(2500);
}
void roda_berputar (void)
{
unsigned char ix, kar, idx;
for (ix = 0; ix < 23; ix++)
{
kar = no_hp[ix];
putchar(kar);
lcd_gotoxy(ix,1);
lcd_puts(buf);
if (kar == 13) break;
}
delay_ms(250);
lcd_gotoxy(0,0);
lcd_putsf ("kirim no hp...");
delay_ms(1000);
lcd_gotoxy(0,1);
lcd_putsf(" ");
}
delay_ms(1000);
lcd_gotoxy(0,0);
lcd_putsf ("dapat prompt....");
delay_ms(1000);
for (ix = 0; ix < 36; ix++)
{
kar = roda_digeser[ix];
putchar(kar);
if (kar == 26) break;
}
lcd_gotoxy(0,0);
lcd_putsf ("sms dan ctrl z..");
delay_ms(1000);
lcd_gotoxy(0,0);
sprintf(buf,"ctrl z buf %03u", idx);
lcd_puts(buf);
hapus_sms();
lcd_gotoxy(0,0);
lcd_putsf ("selesai kirim...");
delay_ms(1000);
}
////
void kunci_stang_lepas (void)
{
unsigned char ix, kar, idx;
for (ix = 0; ix < 23; ix++)
{
kar = no_hp[ix];
putchar(kar);
lcd_gotoxy(ix,1);
lcd_puts(buf);
if (kar == 13) break;
}
delay_ms(250);
lcd_gotoxy(0,0);
lcd_putsf ("kirim no hp...");
delay_ms(1000);
lcd_gotoxy(0,1);
lcd_putsf(" ");
delay_ms(1000);
lcd_gotoxy(0,0);
lcd_putsf ("dapat prompt....");
delay_ms(1000);
for (ix = 0; ix < 36; ix++)
{
kar = kunci_stang[ix];
putchar(kar);
if (kar == 26) break;
}
lcd_putsf ("sms dan ctrl z..");
delay_ms(1000);
lcd_gotoxy(0,0);
sprintf(buf,"ctrl z buf %03u", idx);
lcd_puts(buf);
hapus_sms();
lcd_gotoxy(0,0);
lcd_putsf ("selesai kirim...");
delay_ms(1000);
}
////
void main(void)
{
// Declare your local variables here
unsigned char sms_idx, eko, x, idx;
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0x00;
DDRB=0x01;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0xc0;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: 7.200 kHz
// Mode: Normal top=FFh
// OC0 output: Disconnected
TCCR0=0x05;
TCNT0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: 7.200 kHz
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x07;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: On
// INT0 Mode: Falling Edge
// INT1: On
// INT1 Mode: Falling Edge
// INT2: Off
GICR|=0xC0;
MCUCR=0x0A;
MCUCSR=0x00;
GIFR=0xC0;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x41;
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: On
// USART Mode: Asynchronous
// USART Baud Rate: 9600
UCSRA=0x00;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x2F;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// LCD module initialization
lcd_init(16);
// Global enable interrupts
#asm("sei")
delay_ms(500);
normal = 0;
kirim_lagi = 0;
intruder = 0;
kirim_perintah_no_echo();
idx = rx_counter;
lcd_gotoxy(0,0);
sprintf(buf,"tunggu %03u ",idx);
lcd_puts(buf);
delay_ms(3000);
lcd_gotoxy(0,0);
sprintf(buf,"tunggu %03u ",idx);
lcd_puts(buf);
delay_ms(3000);
while (1)
{
// Place your code here
while(normal==0)
{
lcd_gotoxy(0,0);
sprintf(buf,"buffer %03u ", sms_idx);
lcd_puts(buf);
delay_ms(1000);
for (x = 0; x<15; x++)
{
lcd_gotoxy(x,1);
sprintf(buf,"%c",berita[x+21]);
lcd_puts(buf);
}
if (sensor_depan == 0)
led_stang = 0;
}
if (sensor_belakang == 0)
{
led_roda = 0;
}
delay_ms(500);
lcd_gotoxy(0,0);
lcd_putsf("T1 - gsm control");
if (sensor_depan == 0)
{
led_stang = 1;
}
if (sensor_belakang == 0)
{
led_roda = 1;
}
delay_ms(500);
}
while(normal == 1)
if (sensor_belakang == 1)
{
delay_ms(250);
lcd_gotoxy(0,1);
lcd_putsf(" ");
kirim_lagi = 0;
roda_berputar();
intruder = 1;
}
if (sensor_depan == 1)
{
delay_ms(250);
lcd_gotoxy(0,1);
lcd_putsf(" ");
kirim_lagi = 0;
kunci_stang_lepas();
intruder = 1;
}
lcd_gotoxy(0,0);
lcd_putsf("T2 - normal opr.");
if (sensor_depan == 0)
{
}
if (sensor_belakang == 0)
{
led_roda = 1;
}
delay_ms(500);
lcd_gotoxy(0,0);
lcd_putsf(" ");
if (sensor_depan == 0)
{
led_stang = 0;
}
if (sensor_belakang == 0)
{
led_roda = 0;
}
delay_ms(500);
if (intruder == 1)
{
buzzer = 1;
delay_ms(100);
buzzer = 0;
delay_ms(400);
delay_ms(300);
buzzer = 0;
delay_ms(200);
}
}
};