Pengembangan Robot Line Follower Menggunkan Algoritma
Pledge
Andi Suhendi
Jurusan Ilmu Komputer – Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Pakuan Bogor
Jl. Pakuan PO Box 452 Bogor 16143 Jawa Barat Indonesia Email : [email protected]
Abstrak
Teknologi robot telah digunakan sebagai mesin yang memiliki otomatisasi tinggi, mempunyai peranan yang sangat penting bagi manusia dan industri untuk digunakan dalam pekerjaan yang dirasa sangat penting. Pengembangan robot line follower menggunkan algoritma pledge pada dasarnya dibuat sebagai pengembangan line follower robot menggunakan terknologi sistem pakar yang dapat digunakan sebagai alat bantu dalam bidang pekerjaan otomatisasi driver, dan pengiriman benda.
Fungsi utama untuk mendeteksi garis berada pada sensor photodiode yanga dapat membaca garis dan rintangan yang dilalui, sedangkan ATMega32 hanya sebagai alat komunikasi antara sensor dan driver motor dc, rintangan pada lintasan harus dianalisa berdasarkan kecepatan dan eror yang di hasilkan oleh robot.
1. Pendahuluan
Robot dikembangkan dengan bermacam macam model dan fungsinya. Robot sangat membantu untuk penunjang pekerjaan manusia agar lebih mudah dan cepat untuk melaksanakan tugas yang akan dikerjkan.
Banyak defenisi yang dikemukakan oleh para ahli mengenai robot. Orang awam beranggapan bahwa robot mengandung pengertian suatu alat yang menyerupai manusia, namum struktur tubuhnya tidak menyerupai manusia, melainkan terbuat dari logam atau besi. Saat ini hampir semua orang mengetahui robot, tetapi pengertian robot tidak dipahami secara sama oleh setiap orang. Sehingga pengertian robot dapat diartikan sesuatu yang bersifat otomatis dan dapat dikontrol oleh manusia adalah robot.
Pembuatan robot dengan fungsi yang khusus sangat dibutuhkan di dalam dunia kehidupan untuk membantu pekerjaan yang tidak dapat dikerjakan oleh manusia. Dalam dunia industri, teknologi robot banyak digunakan. Karena dapat mengurangi resiko kecelakaan dan hambatan pada saat proses pengerjaan target. Terbukti di negara negara maju seperti Jepang, pembuatan rel kereta api
sudah otomatis dengan bantuan teknologi robot hal ini membuktikan bahwa pekerjaan ini dapat ditangani lebih cepat tanpa resiko kecelakaan yang patal
Robot line follower (pengikut garis), yaitu suatu jenis robot beroda yang memiliki sensor untuk mendeteksi suatu garis dengan pola garis tertentu kemudian bergerak mengikuti pola garis tersebut.
Selain itu, yang yang melatar belakangi penelitian ini adalah sistem robot line folower digital, robot tersebut menggunakan 8 sensor photodiode untuk menditeksi garis hitam, dengan menggunkan 8 sensor robot belum bisa berjalan stabil karena sensor berbentuk lurus, sehingga robot bingung untuk menentukan mana belokan dan mana sudut patah, ATMega 8535 digunkan sebagai mikrokontroler robot yang kapasitas memorynya lebih kecil dari ATmega32, pada saat kalibrasi sensor robot hanya diketahui dari indikator lampu LED karena robot tidak memiliki LCD untuk tampilan display dan menu-menu pendukung pada robot . (Nurkholis 2012).
Dalam penelitian ini robot line follower akan dikembangkan, dengan 12
photodiode yaitu sensor untuk mebaca garis hitam atau putih, dengan ditambahkan sensor yang lebih banyak diharapkan akurasi pergerakan robot dapat lebih stabil dalam pembacaan garis dan dapat menentukan sudut patah juga belokan, LCD 16x2 sebagai tampilan display, digunkan input program dan informasi kalibrasi robot, dan robot dirancang agar dapat melewati sudut 30 derajat, mendeteksi garis putih dan rintangan lainnya.
Algoritma pledge didesain untuk rintangan melingkar dan memiliki arah awal untuk bergerak maju. Ketika berhadapan dengan rintangan, maka robot akan menggunakan wall follower yang akan menghindari rintangan dengan menghitung jumlah belokan yang ditempuh robot.
2. Tinjauan Pustaka
Algoritma PledgeAlgoritma pledge didesain untuk rintangan melingkar dan memiliki arah awal untuk bergerak maju. Ketika berhadapan dengan rintangan, maka robot akan menggunakan wall follower yang akan menghindari rintangan dengan menghitung jumlah belokan yang ditempuh robot. Ketika robot kembali ke arah awal dan total hitungan
belokan adalah “0”, maka penyelesaian
berlanjut sampai bertemu halangan kembali (Maryani 2013)
Gambar 1. Algoritma Pledge
Algoritma diatas digunakan untuk perancangan robot dengan penelusuran wall
maze (penelusuran labirin). Robot akan terus
berjalan ke arah utama sampai menemukan halangan yang berbentuk lorong. Ketika robot menemukan halangan, robot akan melakukan penelusuran dengan metode wall
follower yaitu dengan mengikuti lintasan
labirin sesuai prioritas yang diterapkan sambil menghitung total belokan.
Mikrokontroler ATmega 32
AVR (Alf and Vegard’s Risc
Processor) merupakan seri mikrokontroller
CMOS 8-bitbuatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. AVR mempunyai 32 register serbaguna, Timer/Counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving. Beberapa di
antaranya mempunyai ADC dan PWM internal. AVR juga memiliki fasilitas sistem
Programmable Flash on-chip yang memungkinkan memori program dapat diprogram ulang saat sistem sedang bekerja (Sumardi, 2013). Seeperti ditunjukan pada gambar nomer 1 di bawah ini.
Penggunaan utama dari
mikrokontroler adalah untuk mengontrol operasi dari mesin. Strategi kendali untuk mesin tertentu dimodelkan dalam program algoritma pengaturan yang ditulis dalam bahasa rakitan (assembly language)
(Suhendar, 2010). Seperti gambar 1 dibawah ini.
Gambar 2. ATMega32
Photodiode adalah dioda yang bekerja berdasarkan intensitas cahaya, jika
phodiode terkena cahaya maka photodiode
bekerja seperti dioda pada umumnya, tetapi jika tidak mendapat cahaya maka photodiode akan berperan seperti resistor dengan nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir. Prinsip kerja sensor sederhana, yaitumemfaatkan sifat cahaya yang akan dipantulkan jika mengenai benda berwarnaterang dan akan diserap jika mengenai bendaberwarna gelap. Sebagai sumber cahaya menggunakan LED (Light
Emiting Diode) yang akan memancarkan
cahaya merah dan untuk menangkap pantulan cahaya LEDmenggunakan photodioda. Jika sensor beradadiatas garis hitam maka
photodioda akan menerima sedikit sekali
cahaya pantulan tetapijika sensor berada diatas garis putih makaphotodioda akan menerima banyak cahayapantulan. Berikut adalah ilustrasinya (Chandra 2011)..
Untuk menggerakkan 2 buah motor DC 12Volt kita memerlukan adanya pengontrol motor DC agar putaran dan kecepatannya bisa dikendalikan dengan
teratur. Pengontrol motor DC saya menggunakan modul DI – driver motor
mosfet yang memiliki kemampuan
menggerakkan motor DC sampai arus 4A dan tegangan maksimum 46 Volt DC untuk satu kanalnya. Pada Tabel I merupakan koneksi antara DI – driver motor mosfet dengan DI –
Smart AVR System melalui 5 pin pada
PORTC yaitu pada PORTC.0 - PORTC.3 sebagai output. Sedangkan 2 pin untuk vcc dan ground yang disuplai langsung dari modul mikrokontroller tersebut sebesar 5 volt (Janis 2014).
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah l berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang biasa berputar bebas di antara kutub-kutub magnet permanen (Chandra 2011).
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat elektronik seperti televisi, kalkulator, atau pun layar komputer. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. (Sainsmart 2015).
Downloader berfungsi untuk memasukkan bahasa pemrograman yang telah dibuat kedalam mikrokontroler.
Software yang digunakan untuk proses
memasukkan program adalah eXtreme burner – AVR. (Chandra 2011).
3. Perancangan Sistem
Gambar 3. Metode Penelitian Hardware Programing
Metode Penelitian bidang Hardware
Programming dapat dilakukan berdasarkan
10 tahap:
1. Perencanaan Rancangan Penelitian
Dalam perencanaan proyek
penelitian, terdapat beberapa hal penting yang harus ditentukan dan dipertimbangkan, antara lain:
1. Penentuan topik Penelitian
2. Estimasi kebutuhan alat dan bahan 3. Estimasi anggaran
Kemungkinan penerapan dari aplikasi yang akan dirancang
2. Penelitian
Penelitian awal dari robot yang akan dibuat, mulai dari pemilihan dan pengetesan komponen (alat dan bahan) yang akan digunakan, kemungkinan rancangan awal
dan akhir yaitu “Pengembangan Robot Line Follower Menggunakan Algoritma Pledge”.
3. Pengetesan Komponen
Dalam pengetesan komponen dilakukan pengetesan alat terhadap fungsi kerja komponen berdasarkan kebutuhan dari robot yang akan didesain
.
4. Desain Sistem Mekanik
Dalam perancangan perangkat keras, desain mekanik merupakan hal penting yang harus dipertimbangkan. Pada umumnya kebutuhan terhadap desain mekanik antara lain :
1. Bentuk dan ukuran PCB (Printed Circuit
Board)
2. Ketahanan dan fleksibilitas terhadap lingkungan
3. Penempatan modul-modul elektronik 4. Pengetesan sistem mekanik yang telah di
rancang
5. Bentuk desain ukuran interface system Bentuk mekanik dibuat dengan ukuran 20 x 20 cm dengan bahan dasar PCB. Seeperti ditunjukan pada gambar nomer 9 dan 10 di bawah ini
.
5. Desain Sistem Listrik
Dalam desain sistem listrik dan mekanik terdapat beberapa hal yang harus diperhatikan, antara lain :
1. Sumber catu daya dan pembagian daya untuk masing-masing komponen 2. Kebutuhan tegangan dan arus untuk
mikrokontroler, sensor dan actuator
3.
Desain sekema rangkaian6. Desain Perangkat Lunak
Desain perangkat lunak yang digunakan dalam penelitian ini menggunakan perangkat lunak ISp Programer CV.AVR, MS office, Visio dan Eagle. Seeperti ditunjukan pada gambar nomer 10 di bawah ini.
7. Tes Fungsional
Tes fungsional meliputi pengetesan fungsional sistem yang telah terintegrasi antara desain listrik dan desain perangkat lunak.
8. Integrasi atau Perakitan
Modul listrik yang diintegrasi dengan
software di dalam kontrolernya, diintegrasikan dalam struktur mekanik yang telah dirancang. Lalu dilakukan tes fungsional keseluruhan sistem.
9. Tes Fungsional Keseluruhan Sistem
Pada tahapan ini dilakukan pengetesan fungsi dari keseluruhan sistem. Apakah dapat berfungsi sesuai dengan konsep atau tidak. Bila ada sistem yang tidak dapat bekerja dengan baik maka harus dilakukan proses perakitan ulang pada setiap desain sistemnya
.
10. Optimasi
Optimasi untuk meningkatkan performa dari robot yang telah dirancang. Optimasi ditekankan pada desain mekanik agar penggunaan lebih maksimal serta optimal.
4. Implementasi dan Pengujian
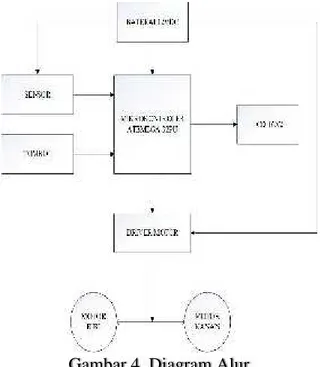
Alat yang telah dirancang dan diimplementasikan ini dapat bergerak mengikuti garis dengan sensor yang digunkan. Sensor akan membaca rintangan rintangan yang disediakan sehingga akan di lanjutkan ke mikrokontroler untuk di olah dan di jalankan oleh motor driver sebagai output.
Gambar 4. Diagram Alur
Desain Sistem Mekanik
Desain sistem mekanik robot akan disesuaikan dengan dimensi yang sudah ditentukan, pada desain mekanik ini seluruh komponen yang dibutuhkan akan di satukan dalam chasis robot
Desain Sistem Elektronik
Desain sistem elektronik yang akan dibangun meliputi dari beberapa komponen yang saling terintregasi untuk satu tujuan yang sama, pada gambar diatas ditunjukan beberapa komponen yang saling terhubung dengan mikrokontroler, sensor, motor driver dan baterai.
Sekematik merupakan sebuah desain yang digunakan untuk menghubungkan port port dari mikrokontroler pada sensor, LCD, motor driver dan tombol.
Gambar 6. Sekema Rangkaian
Desain Sistem Software
Pembuatan perangkat lunak sistem harus mengutamakan cara kerja yang efisien
Gambar 5. Flowchart Sistem
Pengujian Pembacaan Ketebalan Garis
Sensor garis harus bisa mendeteksi garis dengan ketebalan yang akan di lalui, pada pengujia ini akan menghasilkan berapa ukuran maksimal dan minimal tebal garis yang dapat di baca oleh sensor garis
Tabel 1. Pengujian Pembacaan Ketebalan Garis Dengan Sensor
Keterangan:
Tanda ceklis = Berhasil dan Tanda Silang = Tidak Berhasil.
Robot tidak dapat membaca garis pada saat kondisi tebal garis 0,5 Cm dan Robot dapat membaca garis maksimal 3,5 Cm dengan eror yang lebih banyak karna lebar sensor untuk pembacaan pada saat garis lurus hanya 4,0. Sehingga apabila ada bag eror robot akan keluar lintasan
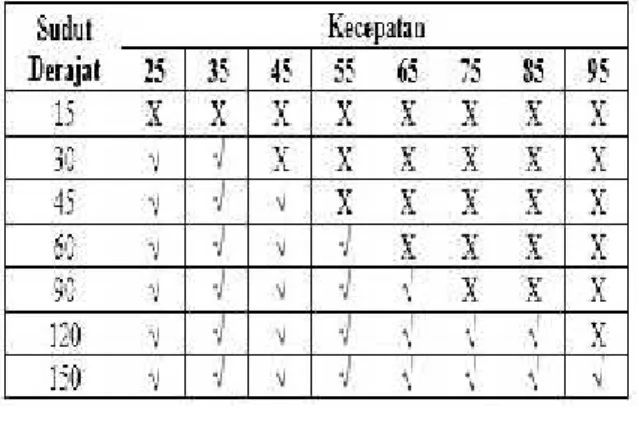
Pengujian Gerak Robot Pada Sudut Derajat
Pengujian ini dilakukan untuk menganalisa apakah robot dapat melewati sudut-sudut patah dengan derajat yang berbeda, dengan menggunkan anilasa pada kecepatan robot. Seperti pada tabel 8 di bawah ini
Tabel 2. Pengujian Robot Pada Sudut Derajat
Keterangan:
Tanda ceklis = Berhasil dan Tanda Silang = Tidak Berhasil.
Pada saat kondisi sudut 15 robot tidak dapat belok karena jarak yang sempit, sulit bagi robot untuk melewatinya, sehingga terjadi kondisi eror pada robot dan robot keluar lintasan, Robot dapat melalui sudut 30 dan 45 dengan kecepatan rendah karena jika kecepatan tinggi maka sensor tidak membaca sehingga robot akan oleng keluar jalur, pada sudut 120 dan 150 robot dapat melewati garis dengan kecepatan maksimal karena sudut tersebut tidak terlalu patah sehingga pembacaan robot akan lurus.
Pengujian Pada Garis melingkar
Pengujian ini dilakukan untuk mengukur kemampuan robot dalam garis yang melingkar dengan dimensi tertentu.
Tabel 3. Pengujian Pada Garis Melingkar
Robot tidak dapat mendeteksi pada lingkaran yang berdiameter 10 Cm – 14 Cm karena dimesi robot yang lebih besar dari diameter lingkaran tersebut
Pengujian Pembacaan Sensor Pada Rintangan
Pengujian ini dilakukan untuk mengetahui kemampuan robot dalam membaca rintangan, dengan logika yang sederhana, pada saat tertentu sensor mana yang membaca garis dan yang tidak membaca garis dengan tingkat kesulitan tertentu, pada tahap ini robot diharapkan dapat melewati rintangan.
Tabel 4. Pengujian Pembacaan Sensor Pada Rintangan
Tabel 5. Pengujian Robot Pada Lintasan di Dalam Ruangan
Hasil uji coba dalam ruangan, dalam waktu 3 menit robot dapat running dari star sampai finish kurang lebih 9 kali, pada percobaan 1 robot dapat menyelesaikan rintangan dengan waktu 0,16 detik dengan eror sebanyak 4 kali, dan pada uji coba 2 – 5 robot tidak dapat menyelesikan rintangan, karena kecepatan yang digunakan tidak cocok untuk lintasan yang digunakan.
Tabel 6. Pengujian robot Pada Lintasan di Luar Ruangan
Hasil uji coba diluar ruangan, dalam waktu 3 menit robot dapat running dari star sampai finish kurang lebih 9 kali, pada percobaan 1 robot dapat menyelesaikan rintangan dengan waktu 0,18 detik dengan eror sebanyak 5 kali, dan pada uji coba 2 – 5 robot tidak dapat menyelesikan rintangan, karena kecepatan yang digunakan tidak cocok untuk lintasan,
5. Kesimpulan dan Saran
Pengembangan robot line follower
menggunkan algoritma pledge pada dasarnya dibuat sebagai pengembangan line follower robot menggunakan terknologi sistem pakar yang dapat digunakan sebagai alat bantu dalam bidang pekerjaan otomatisasi driver, dan pengiriman benda.
Berdasarkan hasil uji coba yang dilakukan dapat diambil kesimpulan bahwa penelitian pengembangan robot line follower menggunkan algoritma pledege, fungsi utama robot berada pada sensor garis yanga dapat membaca garis dan rintangan yang dilalui, sedangkan ATMega32 hanya sebagai alat komunikasi antara sensor dan driver motor dc, rintangan pada lintasan harus dianalisa berdasarkan kecepatan dan eror yang di hasilkan oleh robot.
Kelebihan dari konsep
pengembangan yang telah dibangun ini dari segi hardware, memiliki 12 sensor photodiode lebih banyak dari penelitian sebelumnya, menggunakan ATMega32A yang lebih besar kapasitas memorinya, dan ukuran dimensi robot yang lebih kecil dan simple, dari segi pergerakan, robot dapat
bergerak lebih stabil dengan menggunakan 12 sensor photodiode, sehingga robot pada saat melakukan pengaturan strategi tidak perlu upload ulang program cukup mengatur pada menu robot.
Kekurangannya adalah karena robot tidak menggunkan roda penyetabil di depan sensor dan lampu LED sering rusak akibat terbentur dengan permukaan tembok. Dan pembacaan sensor sering eror karena efek cahaya yang lebih terang dari lampu led yang digunakan, sehingga robot tidak bisa membaca garis dengan maksimal pada saat diluar ruangan.
Saran untuk pengembangan sistem robot perlu dikembangkan terkait masalah pembacaan garis yang lebih sensitif dan tidak terpengaruh oleh cahaya seperti phototransistor, pemilihan ATMega yang lebih besar kpasitas memorynya menjadi salah satu alasan untuk pengembangan selanjutnya.
6. Daftar Pustaka
Atmel. 2011. Data seat ATMega32. www.labcenter.com
Daisy A.N.J,. David P. & Wuwung. 2014.
Rancang Bangun Robot Pengantar Makanan Line follower.
Darmawan, Arief .2001. Elektronika dasar.
Andi. Yogyakarta.
Dwi,Taufiq.S.S. 2010. Buku Pintar Robotika. CV Andi Offset. Yogyakarta.
Epan A.C,. Notosudjono D. & Suhendi D.
2011. ROBOT LINE FOLLOWER.
Maryani. 2013, ANALISIS
PERBANDINGAN ALGORITMA
PLEDGE DENGAN ALGORITMA
WALL FOLLOWER PADA ROBOT WALL MAZE.
Nurkholis. 2012.Robot line follower digital berbasis mikrokontroler ATmega8535. Skripsi Jurusan Ilmu Komputer FMIPA UNPAK, Bogor.
Pranoto. 2009, Line Follower Robot Analog.
Raharjo. 2011, Robot pengikut garis
berbasis mikrokontroler AT89C51 menggunakan sesnsor infra merah.
Sainsmart. 2015. Datasheet LCD 16x2,
Lenexa, Kansas. Amerika serikat.
Sumardi. 2013 Definisi dan Pengunaan