TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Teresia Herlina Bintari
NIM : 025114020
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Teresia Herlina Bintari
NIM : 025114020
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Teresia Herlina Bintari
Student ID Number : 025114020
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF ENGINEERING
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
Kupersembahkan karya tulis ini kepada :
Tuhan Yesus Kristus terkasih,
Bapak dan Ibu Tercinta,
Kedua saudaraku Tanto dan Moko tercinta,
Keluarga besarku tercinta,
Kekasihku tersayang,
Almamaterku Teknik Elektro USD
Kesabaran adalah obat terbaik untuk semua masalah
Dalam setiap kesusahanku kurasakan berkat-Mu tuhan
Jangan ada kata putus asa, selalu masih ada jalan menuju masa depan.
relisasi struktur dan perhitungan finite wordlength effect.
Program akan menghitung koefisien tapis dari spesifikasi masukan dan merepresentasikan koefisien tapis tersebut menjadi jumlah bit tertentu (kuantisasi). Perhitungan koefisien tapis IIR menggunakan metode Peletakan Pole Zero dan metode Impulse Invariant. Koefisien tapis yang terkuantisasi kemudian direalisasikan dalam bentuk struktur, struktur yang digunakan untuk merealisasikan tapis IIR adalah struktur bentuk langsung dan struktur bentuk kaskade. Dari tapis yang telah direalisasikan dalam bentuk struktur tersebut kemudian dihitung finite wordlength effect yaitu coefficient quantization errors.
Program simulasi untuk realisasi struktur tapis IIR telah diimplementasikan dan dilakukan pengujian untuk mengamati kinerja tapis hasil perancangan. Kinerja tapis hasil perancangan diamati dari kurva tanggapan frekuensi yang merupakan spesifikasi aktual dari program simulasi. Hasil yang diperoleh adalah metode Peletakan Pole Zero merupakan metode yang paling baik untuk merancang tapis. Frekuensi sampling yang besar dapat meningkatkan kinerja tapis, dan jumlah bit yang terbatas dapat menurunkan kinerja tapis.
Kata kunci : tapis IIR, perhitungan koefisien tapis, realisasi struktur
how to design the IIR filter from determination specification, calculation of filter coefficient, structure realization and the calculation of wordlength effect.
Program will calculate the filter coefficient from input specification and represented by a fixed number of bit (quantization). Calculation of IIR filter coefficient uses Pole Zero Placement method and Impulse Invariant method. Filter coefficient that have been quantized then realized in the form of structure, it is use to realize IIR filter which one is direct structure and caskade structure. From the filter which has been realized in the form of the structure then program calculated finite wordlength effect that consist of coefficient quantization errors.
Simulation program for realization of structure IIR filter implementation was implemented and tested to observe filter performance. Filter performance observed from the curve of response frequency that representing output of simulation program. The result are the Pole Zero Placement method which is the best method to design IIR filter, high sampling frequency increase performance of filter, limited number of quantization bit decrease performance of filter.
Keyword: IIR filter, calculation of filter coefficient, structure realization
Anugerah-Nya penulis akhirnya dapat menyelesaikan Tugas Akhir ini dengan baik
dan lancar.
Dalam proses penulisan Tugas Akhir ini penulis menyadari bahwa ada begitu
banyak pihak yang telah memberikan perhatian dan bantuan dengan caranya
masing-masing sehingga Tugas Akhir ini dapat terselesaikan. Oleh karena itu penulis ingin
mengucapkan terima kasih antara lain kepada :
1. Tuhan Yesus atas penyertaan dan bimbingannya.
2. Bapak Ir. Greg. Heliarko, S.J., B.S.T., M.A., M.Sc, selaku dekan fakultas teknik.
3. Bapak Damar Widjaya, S.T., M.T. selaku pembimbing I atas ide-ide yang
berguna, bimbingan, dukungan, saran dan kesabaran bagi penulis dari awal
sampai Tugas Akhir ini bisa selesai.
4. Bapak Bayu Primawan, S.T., M.Eng. selaku pembimbing II yang telah bersedia
meluangkan waktu serta memberikan bimbingan dan saran yang tentunya sangat
berguna untuk Tugas Akhir ini.
5. Bapak Ir. Iswanjono, M.T., dan Bapak Djoko Untoro Suwarno, S.Si.,M.T., selaku
penguji yang telah bersedia memberikan saran dan kritik.
6. Seluruh dosen teknik elektro atas ilmu yang telah diberikan selama penulis
menimba ilmu di Universitas Sanata Dharma Yogyakarta.
7. Bapak dan Ibu tercinta atas semangat, doa serta dukungan secara moril maupun
materiil.
10.Atikasari dan Ade, makasih banyak printernya ya, hehe..
11.Teman-teman akrabku : Pandu, Dika, Spadic, Pinto, Wuri, Dewi, Siska, Ratna,
Tika, McD (Dhanny), Komang dan Mas Andika, Teri, Paul, Vian.
12.Teman-teman elektro: Wiryadi, Eva, Butet, Hari, Lele, Sukristanto, Briatma,
Wawan, Heri serta teman-teman angkatan 2001, 2002 dan 2003 yang selalu
berbagi ilmu dan pengalaman kuliah.
13.Dan seluruh pihak yang telah ambil bagian dalam proses penulisan tugas akhir ini
yang terlalu banyak jika disebutkan satu-persatu.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih jauh dari
sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini
sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua
pihak. Terima kasih.
Yogyakarta, 24 April 2007
Penulis
JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN ... vi
HALAMAN MOTTO ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ...xvi
DAFTAR TABEL ... xx
DAFTAR CONTOH ...xxi
BAB I PENDAHULUAN 1.1 Latar Belakang ...1
1.2 Batasan Masalah ...2
1.3 Tujuan Penulisan ……… 3
1.4 Manfaat Penulisan ……….. 3
1.5 Metodologi Penelitian ……… 3
1.6 Sistematika Penulisan ……… 4
2.3 Invers Transformasi-Z ... 9
2.4 Kestabilan ... 10
2.5 Tapis Butterworth ... 15
2.6 Tapis Digital Infinite Impulse Response ... 16
2.7 Langkah-langkah Perancangan Tapis Digital IIR ... 19
2.8 Metode Penghitungan Koefisien Tapis Digital IIR ………... 21
2.8.1 Metode Peletakan Pole Zero ... 22
2.8.2 Metode Impuls Invariant ... 25
2.9 Realisasi Struktur Tapis Digital IIR ………... 27
2.9.1 Struktur Bentuk Langsung ………. 28
2.9.2 Struktur Bentuk Kaskade ………... 29
2.10Finite Wordlength Effect Pada Tapis IIR ………... 31
2.10.1 Coefficient Quantization Errors ……… 31
BAB III PERANCANGAN PROGRAM SIMULASI UNTUK REALISASI STRUKTUR TAPIS DIGITAL INFINITE IMPULSE RESPONSE 3.1 Menentukan Spesifikasi Tapis ... 37
3.2 Menghitung Koefisien Tapis ...38
3.2.1 Fungsi Peletakan Pole Zero ………... 39
3.2.2 Fungsi Impuls Invariant ………. 41
3.3 Realisasi Struktur ... 42
struktur ... 43
3.3.2.2 Kuantisasi koefisien tapis ... 45
3.3.2.3 Pengubahan koefisien terkuantisasi ke bentuk fungsi transfer terkuantisasi ... 48
3.4 Coefficient Quantization Errors ... 50
3.5 Layout Program ... 52
3.5.1 Figure ... 54
3.5.2 Menu editor ... 54
3.5.3 Panel ... 55
3.5.4 Edit text ... 56
3.5.5 Pop-up menu ... 56
3.5.6 Radio button ... 57
3.5.7 List box ... 57
3.5.8 Static text ... 57
3.5.9 Axes ... 58
3.5.10 Push button ... 58
BAB IV HASIL DAN ANALISIS 4.1 Penempatan Berkas Sumber ... 60
4.2 Tampilan Program ... 61
4.3.2 HPF ... 73
4.3.3 BPF ... 76
4.4 Hubungan antara Frekuensi Sampling dengan Kinerja Tapis ... 80
4.5 Hubungan antara Jumlah Bit Kuantisasi Koefisien Tapis dengan
Kinerja Tapis ... 86
4.6 Hubungan Antara Transition Width dan Stopband Attenuation
dengan Jumlah Koefisien Tapis Hasil Perancangan dan Kinerja
Tapis ... 93
BAB V PENUTUP
Kesimpulan ... 96
DAFTAR PUSTAKA
LAMPIRAN
Gambar 2.1 Runtun waktu diskrit...…..………...6
Gambar 2.2 Region of convergence ………..……...8
Gambar 2.3 Bidang-z ...………...10
Gambar 2.4 Kestabilan pada Bidang-z ...…...………..………....…….11
Gambar 2.5 Penempatan zero dan tanggapan frekuensi yang dihasilkan ...12
Gambar 2.6 Penempatan pole dan tanggapan frekuensi yang dihasilkan ...13
Gambar 2.7 (lanjutan) penempatan pole dan tanggapan frekuensi yang dihasilkan14 Gambar 2.8 Tanggapan frekuensi tapis Butterworth …….…………...…...15
Gambar 2.9 Pemetaan bidang-s terhadap bidang-z ...………....…16
Gambar 2.10 Diagram aliran sinyal dan diagram blok ...………....…...18
Gambar 2.11 Blok diagram realisasi struktur bentuk kaskade ………...…..19
Gambar 2.12 Diagram pole-zero dan tanggapan frekuensi dari diagram pole-zero 22 Gambar 2.13 Diagram pole-zero dan Representasi blok diagram dari tapis …...24
Gambar 2.14 Elemen-elemen dasar struktur tapis ...28
Gambar 2.15 Realisasi struktur bentuk langsung tapis IIR …....……...…...…28
Gambar 2.16 Realisasi struktur bentuk kaskade tapis IIR ...30
Gambar 2.17 Efek dari kuantisasi koefisien pada tanggapan frekuensi ……...…32
Gambar 2.18 Segitiga kestabilan menunjukkan letak complex pole, real pole, dan nilai koefisien-koefisien tapis, a1 dan a2, agar tapis stabil ...33
Gambar 3.1 Diagram alir perancangan program simulasi untuk realisasi struktur tapis IIR ...36
Gambar 3.5 Diagram alir fungsi impuls invariant ...…….41
Gambar 3.6 Diagram alir proses realisasi struktur tapis ...…………42
Gambar 3.7 Diagram alir fungsi kuantisasi koefisien …...…47
Gambar 3.8 Diagram alir fungsi struktur bentuk kaskade ...49
Gambar 3.9 Diagram alir proses penghitungan error ...50
Gambar 3.10 Diagram alir fungsi hitung error struktur langsung …………...51
Gambar 3.11 Diagram alir fungsi hitung error struktur kaskade ...52
Gambar 3.12 Layout program simulasi untuk realisasi tapis digital IIR ………….53
Gambar 3.13 Tampilan submenu Bantuan ……...…….54
Gambar 3.14 Tampilan pesan kesalahan ……….56
Gambar 3.15 Window untuk menampilkan struktur tapis ...…58
Gambar 4.1 Browse For Folder ...…...……….…60
Gambar 4.2 Pengaktifan program simulasi melalui jendela MATLAB …... 61
Gambar 4.3 Program pembuka …...…..61
Gambar 4.4 Program utama ...62
Gambar 4.5 Pesan kesalahan masukan ...63
Gambar 4.6 Tampilan permintaan masukan ...63
Gambar 4.7 Pesan kesalahan tanpa masukan ...64
Gambar 4.8 File program disimpan dalam berkas berekstensi *.mat ...66
Gambar 4.9 Message box keluar program simulasi ………... 66
Gambar 4.10 Submenu Tapis Digital IIR ………... 67
Gambar 4.14 Tampilan hasil perancangan menggunakan metode Peletakan Pole
Zero dan metode Impuls Invariant ... 71
Gambar 4.15 Tampilan struktur tapis bentuk langsung ... 71
Gambar 4.16 Tampilan hasil perancangan menggunakan metode Peletakan Pole
Zero dan metode Impuls Invariant ... 74
Gambar 4.17 Tampilan hasil perancangan menggunakan metode Peletakan
Pole-Zero dan metode Impuls Invariant ... 77
Gambar 4.18 Grafik hubungan antara galat pada passband edge frequency dengan
frekuensi sampling ... 82
Gambar 4.19 Grafik hubungan antara galat pada transition width dengan frekuensi
sampling ... 83
Gambar 4.20 Grafik hubungan antara galat pada passband ripple dengan frekuensi
sampling ……… 84
Gambar 4.21 Grafik hubungan antara galat pada stopband attenuation dengan
frekuensi sampling ……… 85
Gambar 4.22 Grafik hubungan antara galat pada passband edge frequency dengan
bit kuantisasi ………. 88
Gambar 4.23 Grafik hubungan antara galat pada transition width dengan bit
kuantisasi ………... 89
Gambar 4.24 Grafik hubungan antara galat pada passband ripple dengan bit
kuantisasi ………... 90
koefisien tapis ……… 93
Gambar 4.27 Grafik hubungan antara transition width dengan jumlah koefisien
tapis………...94
Tabel 4.1 Spesifikasi yang diharapkan pada perancangan LPF ………... 70
Tabel 4.2 Spesifikasi aktual hasil perancangan LPF ……… 72
Tabel 4.3 Spesifikasi yang diharapkan pada perancangan HPF ………... 73
Tabel 4.4 Spesifikasi aktual hasil perancangan HPF ………... 75
Tabel 4.5 Spesifikasi yang diharapkan pada perancangan BPF ………... 76
Tabel 4.6 Spesifikasi aktual hasil perancangan BPF ……… 78
Tabel 4.7 Spesifikasi yang diharapkan untuk merancang LPF ……… 81
Tabel 4.8 Spesifikasi yang diharapkan untuk merancang LPF ……… 87
Tabel 4.9 Spesifikasi yang diharapkan untuk merancang LPF ...93
Contoh 2.1 Transformasi-Z...…..……….….………...6
Contoh 2.2 Persamaan beda.…...………...……….18
Contoh 2.3 Metode Peletakan Pole Zero...…...……….23
Contoh 2.4 Metode Impuls Invariant...……...……….….25
Contoh 2.5 Kuantisasi Koefisien...…….….….34
Contoh 3.1 Koefisien struktur...……... 44
Contoh 3.2 Kuantisasi Koefisien...………….. 45
Contoh 3.3 Fungsi transfer sos terkuantisasi...…….….….48
Contoh 3.4 Fungsi transfer terkuantisasi...…….….….49
1.1
Latar Belakang
Perkembangan teknologi komputer yang begitu cepat membawa dampak yang
besar dalam pengembangan aplikasi yang ada. Meningkatnya kemampuan perangkat
keras komputer yang ditunjang oleh makin canggihnya perangkat lunak
pendukungnya serta makin murahnya komponen komputer menyebabkan
kecenderungan untuk memanfaatkan komputer dalam berbagai aplikasi.
Kecenderungan ini terlihat pula pada bidang ilmu pengetahuan yaitu dengan
munculnya perangkat lunak yang berupa program-program aplikasi yang dipakai
sebagai materi kuliah, diantaranya adalah program aplikasi MATLAB®. Dengan memanfaatkan program aplikasi tersebut, maka penulis akan menyusun tugas akhir
dengan membuat perancangan program simulasi mengenai tapis digital.
Tapis adalah suatu rangkaian yang menghasilkan karakteristik tanggapan
frekuensi yang telah ditentukan dengan tujuan melewatkan rentang frekuensi yang
diinginkan dan menekan atau menolak frekuensi yang tidak diinginkan. Pada proses
pengolahan sinyal, tapis digunakan untuk keperluan penapisan (filtering),
penghalusan (smoothing), dan prediksi (prediction). Sedangkan tapis digital adalah
algoritma matematika yang diimplementasikan dalam hardware atau software yang
beroperasi dengan sinyal masukan untuk menghasilkan sinyal keluaran untuk tujuan
filtering.
Pokok bahasan mengenai tapis digital terdapat dalam materi kuliah Pengolahan
Sinyal Digital. Tapis digital diklasifikasikan menjadi dua macam berdasarkan
tanggapan impulsnya, yaitu tapis digital dengan tanggapan impuls berhingga atau
Finite Impulse Response (FIR) dan tapis digital dengan tanggapan impuls tak
berhingga atau Infinite Impulse Response (IIR).
Tugas akhir dengan judul “Program Simulasi Untuk Realisasi Struktur Tapis
Digital IIR” ini akan memfokuskan diri pada perancangan program simulasi untuk
realisasi struktur digital IIR supaya pemahaman mengenai tapis digital IIR, terutama
mengenai realisasi strukturnya dapat dilakukan lebih mudah. Kelebihan dari tapis
digital IIR antara lain adalah sebagai berikut:
1. Tapis digital IIR memerlukan koefisien, waktu pengolahan, dan storage yang
lebih sedikit.
2. Tapis analog dapat langsung diubah secara langsung menjadi tapis digital
ekuivalensinya dalam bentuk IIR.
1.2 Batasan Masalah
Pada penyusunan Laporan Tugas Akhir ini, penulis membatasi permasalahan
yang ada. Batasan masalah tersebut antara lain adalah sebagai berikut:
1. Spesifikasi tapis terdiri dari passband edge frequency, transition width,
frekuensi sampling, passband ripple, dan stopband attenuation.
2. Penghitungan koefisien tapis menggunakan Invariant Impulse Method dan
Pole-Zero Placement Method.
4. Finite wordlenght effect yang dianalisis adalah coefficient quantization
errors.
1.3 Tujuan Penulisan
Tujuan penyusunan Laporan Tugas Akhir ini adalah untuk menghasilkan suatu
program bantu untuk memudahkan pemahaman tentang realisasi struktur tapis digital
IIR.
1.4
Manfaat Penulisan
Manfaat dari penulisan Laporan Tugas Akhir ini antara lain adalah:
1. Dapat mengetahui dan memahami tentang tapis digital IIR yang terdiri dari
perancangan, realisasi struktur tapis dan analisis wordlenght effect.
2. Menjadi rujukan/ acuan/ referensi mengenai tapis digital IIR untuk
pengembangan lebih lanjut.
1.5
Metodologi Penelitian
Penulisan Laporan Tugas Akhir ini disusun berdasarkan langkah-langkah
sebagai berikut:
1. Studi pustaka yang berhubungan dengan realisasi struktur tapis digital IIR.
2. Pembuatan program simulasi menggunakan program MATLAB.
3. Menguji program simulasi yang telah dibuat.
4. Membahas dan menganalisa hasil rancangan yang diperoleh dari program
5. Membuat kesimpulan dari hasil pembahasan dan analisis.
1.6
Sistematika Penulisan
Sistematika penulisan Laporan Tugas Akhir ini disusun berdasarkan
langkah-langkah sebagai berikut:
1. Bab I PENDAHULUAN
Berisi latar belakang, batasan masalah, tujuan penulisan, manfaat penulisan,
metodologi penelitian dan sistematika penulisan.
2. Bab II DASAR TEORI
Berisi dasar teori mengenai transformasi Z dan tapis digital IIR.
3. Bab III PERANCANGAN DAN SIMULASI
Berisi langkah-langkah perancangan program simulasi untuk realisasi struktur
tapis digital IIR.
4. Bab IV HASIL DAN ANALISIS
Berisi hasil simulasi dan pembahasan dari program simulasi untuk realisasi
struktur tapis digital IIR.
5. Bab V PENUTUP
Pada Bab ini akan dibahas mengenai dasar teori tapis digital IIR, yang meliputi kestabilan, analisa error kuantisasi dan menghitung tanggapan frekuensi pada sistem diskrit. Di sini akan dibahas juga mengenai Transformasi-Z karena erat kaitannya dengan sistem waktu diskrit yang akan digunakan dalam tapis digital.
2.1 Transformasi-Z
Transformasi-Z dari suatu runtun, x
( )
n , untuk semua n, didefinisikan dengan :
( )
∑
( )
∞
∞ −
−
= n
z n x z
X
( )
2.1dengan z adalah variabel komplek [1].
Pada sistem kausal, x
( )
n tidak bernilai nol hanya pada interval 0<n<∞, sehingga persamaan(
2.1)
bisa disederhanakan menjadi
( )
∑
( )
∞
=
− =
0
n
n
z n x z
X
( )
2.2Persamaan
(
2.2)
disebut transformasi-Z satu sisi.Transformasi-Z merupakan suatu runtun dengan panjang yang tak berhingga, dan tidak konvergen untuk semua nilai . Daerah dengan transformasi-Z konvergen z
(memiliki nilai tertentu) disebut sebagai region of convergence (ROC), dan pada bagian ini nilai X
( )
z berhingga. ROC ditentukan oleh sifat dari x( )
n .Transformasi-Z, X
( )
z , pada persamaan( )
2.2 dapat dikembangkan menjadi
( )
( )
( ) ( )
0 1( )
2( )
3 ....1 2 3
0 + + + + = = − − − ∞ = −
∑
z x z x z x x z n x z X n n( )
2.3Dapat dilihat bahwa nilai dari x
( )
n merupakan koefisien dari , . Pada praktek, sering dinyatakan sebagai perbandingan antara dua polinomial padaatau ekuivalen pada .
n
z−
(
n=0 ,1 ,...)
( )
z X 1 − z z( )
N N N N z a z a z a a z b z b z b b zX − − −
− − − + + + + + + + + = .... .... 2 2 1 1 0 2 2 1 1
0
( )
2.4Contoh 2.1
Tentukan transformasi-Z dan region of convergence untuk runtun waktu diskrit pada Gambar 2.1.
Gambar 2.1 Runtun waktu diskrit, [1]
Penyelesaian
Runtun waktu diskrit pada Gambar 2.1 dapat didefinisikan secara matematis sebagai berikut
( )
0 0 0 1 < = ≥ = n n n xjelaslah bahwa ini merupakan runtun kausal tak berhingga. Dengan persamaan
(
, transformasi-Z dari runtun waktu diskrit pada Gambar 2.1 adalah)
1 . 2( )
( )
( )
( )
( )
( )
... 1 ... 2 1 0 2 1 2 1 0 0 + + + = + + + = = = − − − − ∞ = − ∞ −∞ = −∑
∑
z z z x z x z x z n x z n x z X n n n nSistem akan konvergen jika z−1 <1 atau z >1. X
( )
z dapat dinyatakan dalam bentuk tertutup seperti berikut
( )
1 1 1 ... 1 1 2 1 − = − = + + + = − − − z z z z z z X
( )
2.5Jika z=2, maka dengan menggunakan persamaan
( )
2.5 menjadi
( )
( ) ( )
21 2 2 ... 2 1 2 1 2 1
1 2 3 =
− = + + + + = z X
Jika z=12, maka dengan menggunakan persamaan
( )
2.5 menjadi
Gambar 2.2 Region of convergence, [1]
Dari contoh di atas terlihat bahwa X
( )
z akan konvergen jika z berada di luar unit circle, dan akan divergen jika berada di dalam z unit circle.2.2 Sifat-sifat
Transformasi-Z
Beberapa sifat dari transformasi-Z adalah sebagai berikut
1. Linearity. Jika runtun x1
( )
n dan x2( )
n mempunyai transformasi-Z dan , maka transformasi-Z dari kombinasi linearnya adalah( )
z X1( )
zX2
ax1
( )
n +bx1( )
n →aX1( )
z +bX2( )
z( )
2.62. Delay atau shift. Jika tansformasi-Z dari x
( )
n adalah X( )
z , maka transformasi-Z dari x( )
n yang tertunda sebesar m adalah z−mX( )
z atau
( )
( )
(
n m)
z X(
z xz X n x
m
− → −
→
)
3. Convolution. Sistem LTI (Linear Time-Invariant) diskrit dengan input x
( )
n dan tanggapan impuls h( )
k menghasilkan output
( )
∑
( ) (
)
∞
−∞ =
− =
k
k n x k h n
Dalam bentuk transformasi-Z, input dan output memiliki hubungan perkalian berikut :
Y
( )
z =H( ) ( )
z X z( )
2.8dengan X
( )
z , H( )
z dan Y( )
z adalah bentuk transformasi-Z dari x( )
n , h( )
k dan y( )
n .4. Differentiation. Jika X
( )
z adalah transformasi-Z dari , maka transformasi-Z dari( )
n x( )
nnx diperoleh dengan diferensiasi X
( )
z berikut
( )
( )
( )
( )
z z X z n nx
z X n x
d d − → →
( )
2.9Sifat ini digunakan untuk memperoleh invers transformasi-Z jika X
( )
z memiliki orde pole yang banyak.2.3 Invers Transformasi-Z
Invers transformasi-Z (IZT) berguna untuk mengembalikan runtun waktu diskrit . IZT umumnya digunakan pada pemrosesan sinyal digital, misalnya untuk mencari tanggapan impuls dari tapis digital. Invers transformasi-Z dinyatakan dengan
( )
n xx
( )
n =Z−1[
X( )
z]
(
2.10)
dengan X( )
z adalah transformasi-Z dari x( )
n dan Z−1 adalah simbol dari invers2.4 Kestabilan
Analisis kestabilan merupakan salah satu bagian yang harus diperhatikan dalam merancang sistem waktu diskrit. Sistem LTI dikatakan stabil jika dan hanya jika memenuhi kriteria berikut
∑
( )
<∞∞
=0
k
k
h
(
2.11)
dengan adalah tanggapan impuls sistem. Jika tanggapan impuls memiliki panjang berhingga (konvergen), maka kondisi di atas terpenuhi.
( )
k hSistem akan stabil jika semua pole berada di dalam unit circle atau memiliki lokasi yang sama dengan zero jika terletak pada unit circle. Suatu sistem dengan pole berada pada unit circle dianggap tidak stabil atau berpotensi tidak stabil. Untuk sistem yang tidak stabil, tanggapan impuls akan terus meningkat sebanding dengan pertambahan waktu. Pole dan zero digambarkan pada bidang-z.
Bidang-z adalah koordinat kartesius dengan sumbu x yang merepresentasikan nilai real dan sumbu y yang merepresentasikan nilai imajiner. Bagian ini akan menjelaskan nilai dari yang dapat membuat fungsi transfer menjadi nol (zero) atau menjadi tak berhingga (pole). Pole digambarkan dengan “x”, sedangkan zero digambarkan dengan “o” [2]. Gambar 2.3 menunjukkan bidang-z.
z
Pada bidang-z ada tiga kemungkinan sistem untuk kestabilan, yaitu stabil, marginally stabil, dan tidak stabil. Sistem dikatakan stabil jika semua pole terletak di dalam unit circle atau selokasi dengan zero jika terletak pada unit circle. Sistem dikatakan tidak stabil jika pole terletak di luar unit circle, dan dikatakan marginally stabil jika pole terletak pada unit circle. Kestabilan dapat ditentukan dari letak pole, sedangkan zero tidak. Gambar 2.4 menunjukkan kestabilan pada bidang-z.
Gambar 2.4 Kestabilan pada Bidang-z [1]
Apabila zero terletak pada suatu titik di bidang-z, maka nilai pada tanggapan frekuensi akan sama dengan nol pada titik tersebut. Sedangkan pole akan menghasilkan puncak (peak) pada frekuensi yang sesuai. Pole yang letaknya mendekati unit circle, memberikan peak yang besar pada tanggapan frekuensi, sedangkan zero yang letaknya mendekati unit circle, memberikan nilai minimum.
Penempatan pole dan zero beserta tanggapan frekuensi yang dihasilkan dapat dilihat pada Gambar 2.5 dan Gambar 2.6, [4].
1. Zero yang terletak di dalam unit circle pada bidang-z akan menyebabkan penurunan gain tapis pada frekuensi yang merupakan lokasi zero. Keadaan ini dapat dilihat pada Gambar 2.5(a).
Gambar 2.5 Penempatan zero dan tanggapan frekuensi yang dihasilkan [4]
2. Zero yang letaknya mendekati unit circle, akan menghasilkan atenuasi yang besar pada frekuensi tersebut. Atenuasi maksimum terjadi jika zero terletak pada unit circle. Keadaan ini dapat dilihat pada Gambar 2.5(b).
4. Jika jumlah zero lebih dari satu dapat menguatkan atenuasi pada titik tersebut. Keadaan ini dapat dilihat pada Gambar 2.5(d).
Penggunaanpole :
1. Pole yang terletak di dalam unit circle akan menghasilkan peak pada frekuensi letak pole. Keadaan ini dapat dilihat pada Gambar 2.6(a).
2. Pole yang letaknya mendekati unit circle akan menghasilkan peak yang hampir mendekati pusat. Keadaan ini dapat dilihat pada Gambar 2.6(b).
Gambar 2.7 (lanjutan) penempatan pole dan tanggapan frekuensi yang dihasilkan[4]
3. Pole juga harus memiliki pasangan konjugasi jika terletak dimana saja selain di sumbu x. Keadaan ini dapat dilihat pada Gambar 2.6(c).
4. Menambahkan jumlah pole dapat menambahkan jumlah peak. Keadaan ini dapat dilihat pada Gambar 2.6(d).
5. Pole yang letaknya sangat dekat dengan unit circle akan menghasilkan tapis yang memiliki tanggapan impuls yang panjang dan mendekati kestabilan. Keadaan ini dapat dilihat pada Gambar 2.7(e).
6. Pole yang terletak pada unit circle dapat menghasilkan rancangan untuk osilator. Hal ini menyebabkan ketidakstabilan. Keadaan ini dapat dilihat pada Gambar 2.7(f).
2.5
Tapis Butterworth
Tapis Butterworth lowpass memiliki karakteristik tanggapan frekuensi magnitude berikut
( )
NH 2 2
1 1 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + = p p ω ω
ω
( )
2.12dengan adalah orde tapis dan adalah frekuensi cutoff 3 dB dari tapis lowpass (untuk prototype tapis ternormalisasi, = 1). Tanggapan frekuensi magnitude dari tapis Butterworth lowpass ditunjukkan pada Gambar 2.8. Tanggapan dikatakan maksimal flat karena tapis tersebut memiliki permulaan yang tidak datar (lereng dari zero berada di dc).
N p p ω p p ω
Gambar 2.8 Tanggapan frekuensi tapis Butterworth [1]
Orde tapis, N, memiliki rumus
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ − − ≥ p p p s ω ω log 2 1 10 1 10 log 10 10 p s A A
dengan dan adalah passband ripple dan stopband attenuation dalam dB, dan adalah frekuensi stopband.
p
A As
p s
ω
Fungsi transfer untuk tapis Butterworth ternormalisasi, , memiliki nilai zero yang tak berhingga dan nilai pole yang secara keseluruhan terletak di dalam lingkaran dengan radius 1 pada s-plane (bidang-s) pada lokasi berikut :
( )
s H( )
(
)
(
)
⎥⎦ ⎤ ⎢⎣
⎡ + −
+ ⎥⎦ ⎤ ⎢⎣
⎡ + −
=
= + −
N N k j
N N k e
sk j k N N
2 1 2
sin 2
1 2
cos
2 1
2 π π
π
k=1,2,...,N
( )
2.14Pole yang ada memiliki pasangan konjugasi kompleks dan terletak di sisi kiri bidang-s atau di dalam unit circle pada bidang-z. Gambar 2.9 menunjukkan pemetaan bidang-s terhadap bidang-z.
Gambar 2.9 Pemetaan bidang-s terhadap bidang-z [3]
2.6
Tapis Digital Infinite Impulse Response
tapis digital yang keluarannya selain bergantung pada masukannya juga bergantung pada keluaran sebelumnya. Sedangkan tapis digital non rekursif adalah tapis digital yang keluarannya hanya bergantung pada masukannya saja.
Tapis IIR memiliki struktur yang rekursif dengan karakteristik persamaan beda (difference equation) sebagai berikut
( )
∑
( ) (
)
∑
(
)
∑
(
)
; = 0, 1, 2, 3, …∞ = = = − − − = − =
0 0 1
k N k M k k
kx n k a y n k
b k n x k h n
y k
( )
2.15dengan y
( )
n adalah keluaran tapis digital, h( )
k adalah tanggapan impuls tapis digital, x(
n−k)
adalah masukan tapis sebelumnya, y(
n−k)
adalah keluaran tapis sebelumnya, dan ak dan bk adalah koefisien tapis.Fungsi transfer untuk tapis IIR adalah
( )
∑
∑
= − = − − − − − + = + + + + + + = M k k k N k k k M M N N z a z b z a z a z b z b b z H 1 0 1 1 1 1 0 1 ... 1 ...
( )
2.16fungsi transfer pada persamaan
( )
2.16 di atas dapat difaktorisasi menjadi
( )
(
)(
) (
)
(
)(
) (
M)
N p z p z p z z z z z z z K z H − − − − − − = . . . . . . 2 1 2
1
( )
2.17dengan z1, z2, … merupakan tempat kedudukan zero, dan , … merupakan
tempat kedudukan pole.
1
p p2
Contoh 2.2
Persamaan beda y
( ) (
n =x n−1)
−a1y(
n−1)
+a2y(
n−2)
+a3y(
n−3)
Diagram aliran sinyal dapat dilihat pada Gambar 2.10(a) berikuty(n)
x(n)
z−1
z−1 z−1 a1
a2
a3
Gambar 2.10(a) Diagram aliran sinyal, [1].
dan diagram bloknya ditunjukkan pada Gambar 2.10(b) berikut
z−1
z−1 z−1
z−1
Σ y(n)
x(n) x(n−1)
y(n−1)
y(n−2) y(n−3) −a1
a2
a3
Gambar 2.10(b) Diagram blok, [1].
1
−
z menyatakan delay satu unit (satu satuan waktu), sedangkan anak panah menyatakan perkalian. Jika orde dari fungsi transfer, , tinggi maka tapis tidak dapat direalisasikan secara langsung seperti diagram di atas. Penyelesaiannya adalah dengan memecah fungsi transfer tersebu
( )
z Ht menjadi kombinasi kaskade transformasi-Z orde satu dan orde dua.
Untuk realisasi struktur bentuk kaskade dengan H
( )
z orde tinggi, maka fungsi transfer dapat difaktorisasi menjadi( )
( )
( )
( )
( )
∏
( )
= = • = k i i k z H z H z H z H z H z H 1 2 1 ...dengan Hi
( )
z adalah orde satu atau orde dua. Jika orde satu maka persamaannya( )
11 1 1 0 1 1 − − + + = iz a iz b b
Hi
(
2.19a)
sedangkan jika orde dua maka persamaannya
( )
22 1 1 2 2 1 1 0 1
2 − −
− − + + + + = iz a iz a iz b iz b b
Hi
(
2.19b)
Blok diagram realisasi struktur bentuk kaskade adalah
Gambar 2.11 Blok diagram realisasi struktur bentuk kaskade, [1].
Tapis IIR memiliki beberapa macam realisasi struktur. Pada tugas akhir ini yang akan dibahas diantaranya adalah struktur tapis bentuk langsung dan bentuk kaskade. Realisasi stuktur tapis berarti mengubah fungsi transfer, , ke bentuk struktur yang sesuai.
( )
z H2.7 Langkah-langkah Perancangan Tapis Digital IIR
Perancangan tapis digital IIR dilakukan dengan mengikuti alur perancangan yang terdiri dari lima tahap utama seperti berikut :
1. Menentukan spesifikasi tapis, seperti passband edge frequency, transition width, frekuensi sampling, transition width, passband ripple, stopband attenuation.
2. Menghitung koefisien tapis, yaitu mencari nilai dan . Ada beberapa metode yang dapat digunakan untuk menghitung koefisien tapis, yaitu:
k
a) Metode Impuls Invariant (Invariant Impulse Method)
b) Metode Transformasi Bilinier (Bilinier Transformation Method) c) Metode Peletakan Pole-Zero (Pole-Zero Placement Method)
Metode yang akan digunakan dalam tugas akhir ini hanya metode Peletakan Pole-Zero dan metode Impuls Invariant. Metode-metode ini akan dibahas lebih lanjut pada subbab berikutnya.
3. Realisasi struktur tapis, yaitu mengubah fungsi transfer, , ke bentuk struktur tapis yang sesuai. Ada beberapa macam bentuk struktur tapis, yaitu
( )
z Ha) Bentuk langsung b) Bentuk kaskade c) Bentuk paralel.
Struktur tapis yang akan digunakan dalam tugas akhir ini hanya bentuk langsung dan bentuk kaskade. Bentuk-bentuk struktur tersebut akan dibahas lebih lanjut pada subbab berikutnya.
4. Analisa finite wordlenght effect
Finite wordlenght effect adalah efek yang terjadi jika jumlah bit untuk menyatakan koefisien terbatas. Efeknya adalah penurunan kinerja tapis sampai pada kondisi tidak stabil. Sumber utama penurunan kinerja tapis digital yaitu
a) Sedikitnya level kuantisasi sinyal masukan dan keluaran.
c) Roundoff error, yaitu kesalahan karena pembulatan aritmatika yang menyebabkan tapis tidak stabil.
d) Overflow, yaitu hal yang terjadi jika hasil penjumlahan melebihi wordlenght yang diinginkan.
Pada tugas akhir ini yang akan dibahas adalah mengenai coefficient quantization error saja dan akan dijelaskan lebih lanjut pada subbab berikutnya.
5. Implementasi tapis
Implementasi bisa dilakukan pada software maupun hardware dengan mengacu pada persamaan beda (difference equation). Pada tugas akhir ini, implementasi tapis akan dilakukan dalam bentuk software.
2.8 Metode Penghitungan Koefisien Tapis Digital IIR
Pada langkah ini akan dilakukan penghitungan nilai koefisien tapis sehingga spesifikasi dari tanggapan frekuensi yang diberikan pada langkah pertama terpenuhi.
analog menjadi tapis digital ekuivalensinya, yaitu Impulse Invariant Method, Matched z-Transform Method, dan Bilinier z-Transform Method.
Pada Tugas Akhir ini ada dua macam metode yang akan digunakan untuk menghitung koefisien tapis, yaitu
1) Metode Peletakan Pole Zero (Pole Zero Placement Method) 2) Metode Impuls Invariant (Impulse Invariant Method)
2.8.1 Metode Peletakan Pole-Zero
Setelah menemukan fungsi transfer, maka dapat digambarkan plot dari pole dan zero. Plot dari pole dan zero pada fungsi transfer digambarkan pada bidang-z. Dalam metode ini, hal yang perlu diperhatikan adalah agar koefisien tapis menjadi real, maka pole dan zero harus merupakan pasangan konjugasi kompleks. Diagram pole zero ditunjukkan pada Gambar 2.12(a) sedangkan kurva tanggapan frekuensi ditunjukkan pada Gambar 2.12(b).
Gambar 2.12(a) Diagram pole zero [1]
Gambar 2.12(b) Tanggapan frekuensi dari diagram pole zero [1]
Contoh 2.3
Tapis bandpass akan dirancang untuk mendekati spesifikasi berikut 1) Sinyal rejeksi secara penuh pada frekuensi dc dan 250 Hz; 2) Titik tengah passband pada frekuensi 125 Hz;
3) Bandwidth 3 dB pada frekuensi 10 Hz.
Jika frekuensi sampling 500 Hz, tentukan fungsi transfer tapis dengan peletakan pole dan zero pada bidang-z dan hitung persamaan bedanya. Penyelesaian
Langkah pertama adalah menentukan letak pole dan zero pada bidang-z. Karena sinyal rejeksi yang diperlukan berada pada frekuensi dc dan 250 Hz, maka zero diletakkan pada titik tersebut pada bidang-z, yaitu pada sudut 0° dan 360°×250 500=180° pada unit circle. Untuk mendapatkan titik tengah passband pada frekuensi 125 Hz,umaka pole diletakkan pada sudut ±360°×125 500=±90°.
Radius, r, pada pole ditentukan oleh lebar bandwidth. Hubungan antara r, untuk r > 0.9, dan bandwidth, bw, yaitu
(
Fs)
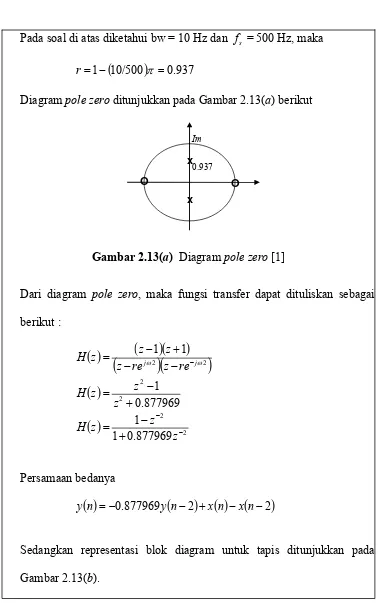
πPada soal di atas diketahui bw = 10 Hz dan fs = 500 Hz, maka r=1−
(
10/500)
π =0.937Diagram pole zero ditunjukkan pada Gambar 2.13(a) berikut
Im 0.937 x x O O
Gambar 2.13(a) Diagram pole zero [1]
Dari diagram pole zero, maka fungsi transfer dapat dituliskan sebagai berikut :
( )
(
(
)(
)(
)
)
( )
( )
2 22 2 2 2 877969 . 0 1 1 877969 . 0 1 1 1 − − − + − = + − = − − + − = z z z H z z z H re z re z z z z
H jω jω
Persamaan bedanya
( )
n =−0.877969y(
n−2) ( ) (
+x n −x n−2)
y
z−1 Σ y(n)
x(n)
−1
−0.877969
z−1
z−1
z−1
Gambar 2.13(b) Representasi blok diagram dari tapis [1]
Koefisien-koefisien tapis digital yaitu b0 = 1 a1 = 0
b1 = 0 a2 = 0.877 969 b2 = -1
2.8.2 Metode Impuls Invariant
Metode ini dimulai dengan fungsi transfer analog, , dan tanggapan impuls,
( )
s H( )
th , yang diperoleh dengan menggunakan transformasi Laplace. Tanggapan impuls, , yang diperoleh juga digunakan untuk menghasilkan
. Fungsi transfer,
( )
t h(
nTh
)
H( )
z , merupakan transformasi-Z dari , dengan Tadalah interval sampling.
(
nT h)
Contoh 2.4
Rancanglah tapis dengan menggunakan metode Impuls Invariant yang mendekati spesifikasi tapis analog sederhana dengan fungsi transfer
( )
p s
C s H
−
Penyelesaian
Tanggapan impuls, h
( )
t , diperoleh dengan invers transformasi Laplace( )
[
( )
]
ptCe p s C L s H L t
h ⎟⎟=
⎠ ⎞ ⎜⎜ ⎝ ⎛ − =
= −1 −1
)
(
2.22)
dengan merupakan simbol dari invers transformasi Laplace. Menurut metode impuls invariant, tanggapan impuls ekuivalen dari filter digital,
, sama dengan
1
− L
(
nTh h
( )
t pada waktu diskrit, maka( ) ( )
pnTnT t Ce
t h nT
h = = = ; t=nT,n=0,1 ,2,...
(
2.23)
Fungsi transfer, H
( )
z , dihasilkan dari transformasi-Z , sehingga diperoleh rumus(
nTh
)
( )
( )
( )
10 1 0 1 − ∞ = − ∞ = − − = = =
∑
∑
z e C z H z Ce z nT h z H pT n n pnT n
(
2.24)
Dari hasil di atas, maka dapat dituliskan
1 1− − →
− e z
C p
s C
pT
(
2.25)
Untuk tapis IIR orde tinggi, Mth, fungsi transfer, H
( )
s , dapat diuraikan menggunakan partial fraction menjadi single pole, yaitu
( )
( )
∑
= − = − + + − + − = M K K K M M p s C s H p s C p s C p s C s H 1 2 2 1 1 ...
(
2.26)
dengan pK adalah pole dari H
( )
s dan CK adalah koefisien partial∑
∑
= − = − → − M K T p K M K K K z e C p s C K 1 1 1 1(
2.27)
Tapis IIR orde tinggi umumnya direalisasikan dengan kombinasi kaskade karena merupakan bagian dari tapis second orde section (sos).
Maka transformasi dari persamaan
(
2.27)
adalah
(
)
(
)
1 ( ) 21 2 1 2 1 1 2 1 1 2 2 1 1 2 1 2 1 1 2 2 1 1 1 1 − + − − − − + + − + − + = − + − → − + − z e z e e z e C e C C C z e C z e C p s C p s C T p p T p T p T p T p T p T p
(
2.28)
Jika dan merupakan konjugasi kompleks, dan C dan C juga merupakan konjugasi kompleks, maka persamaan
(
dapa1
p p2 1 2
)
28 2. t disederhanakan menjadi( )
( )
[
]
( )
-1 2 -2 -1 1 1 1 1 z z cos 2 -1 z 2 sin cos -2 11 1 2 pT
i T p T p i i i r r T p T
p r r
r e T p e e T p C T p C C z e C z e C + + = − + − − ∗
−
(
2.29)
dengan Cr dan Ci merupakan bagian real dan imaginer dari C1, pr dan merupakan bagian real dan imaginer dari
i
p p1, dan simbol *
merupakan konjugasi komplek.
2.9 Realisasi Struktur Tapis Digital IIR
Gambar 2.14 Elemen-elemen dasar struktur tapis [1]
Struktur tapis yang akan digunakan untuk merealisasikan tapis IIR ada dua macam, yaitu struktur bentuk langsung dan struktur bentuk kaskade.
2.9.1 Struktur Bentuk Langsung
Seperti telah diketahui sebelumnya bahwa karakteristik persamaan dari tapis IIR adalah
( )
M Nz a
z b z
H M
k
k k N k
k k
≥ +
=
∑
∑
= − =
−
; 1
1
0 (2.30a)
( )
∑
−(
)
∑
(
)
= =
− −
− = 1
0 1
N k
M k
k
kx n k a y n k
b n
y
(
2.30b)
Realisasi bentuk langsung dari persamaan
(
2.30)
ditunjukkan pada Gambar 2.15, dengan N =M supaya sederhana.Koefisien-koefisien yang digunakan sama seperti yang ada pada fungsi transfer, tetapi untuk koefisien denominator tandanya dibalik.
2.9.2 Struktur Bentuk Kaskade
Realisasi kaskade untuk fungsi transfer difaktorkan ke dalam N 2 dengan second order section ( sos ) berikut
( )
( )
∏
( )
( )
∏
= = − − − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + + + = 2 2 1 1 2 2 1 1 2 2 1 1 0 1 N N k k kk k k
k k k z D z N z H z a z a z b z b b z H
(
2.31a)
dengan
( )
22 1 1 0 − − + +
=b b z b z z
Nk k k k
( )
22 1 1
1+ − + −
= a z a z
z
Dk k k
(
2.31b)
N merupakan orde tapis, yang berjumlah genap. Jika ganjil, maka salah satu dari Hk
( )
z merupakan first-order section. Nk( )
z adalah numerator dan Dk( )
z adalah denominator.Setiap sos, , dapat direalisasikan dengan membuat blok-blok dan hasilnya kemudian digabungkan secara kaskade, seperti ditunjukkan oleh Gambar 2.16.
Gambar 2.16 Realisasi struktur bentuk kaskade tapis IIR [1]
Faktor numerator dan denominator dapat diperoleh dengan banyak cara, misalnya, tapis orde empat dapat difaktorkan menjadi sos, dan kemudian dipasangkan dan diurutkan menjadi satu dengan empat cara yang berbeda seperti berikut
(1)
( )
( )
( )
( )
( )
z D z N z D z N z Hk 2 2 1 1 =
(2)
( )
( )
( )
D( )
( )
z z N z D z N z Hk 1 1 2 2 =(3)
( )
( )
( )
D( )
( )
z z N z D z N z Hk 1 2 2 1 =(4)
( )
( )
( )
( )
( )
z D z N z D z N z Hk 2 1 1 2 =
dan , sedangkan bagian kedua terdiri dari pasangan numerator dan denominator dan
( )
z D1( )
zN2 D2
( )
z . Hal ini menjelaskan bahwa angka-angka yang mungkin dipasangkan dan diurutkan pada numerator dan denominator cukup besar. Untuk tapis orde ke- , angka-angka yang mungkin untukdipasangkan dan diurutkan secara berbeda adalah N
2
! 2 ⎟⎠
⎞ ⎜ ⎝ ⎛N .
2.10
Finite Wordlenght Effect
pada Tapis IIR
Koefisien-koefisien tapis, dan , yang diperoleh dari tahap kedua perancangan tapis IIR memiliki panjang yang tak berhingga atau memiliki tingkat kepresisian yang tinggi, umumnya memiliki enam tempat desimal [1]. Jika tapis IIR diimplementasikan pada sistem yang lebih kecil, seperti mikorokomputer dengan 8-bit, maka akan terjadi error saat merepresentasikan koefisien tapis dan pada operasi aritmatika ditunjukkan dengan persamaan beda. Error ini dapat menurunkan unjuk kerja tapis dan dapat menyebabkan tapis menjadi tidak stabil. Subbab berikut ini akan membahas mengenai pengaruh dari perubahan jumlah bit pada suatu sistem.
k
a bk
2.10.1 Coefficient Quantization Errors
Tapis IIR memiliki karakteristik seperti persamaan
(
2.30a)
. Jika koefisien dikuantisasi menjadi sejumlah bit terbatas, maka fungsi transfer terkuantisasi :
[
( )
]
[ ]
[ ]
∑
∑
= − = − + = M k k q k N k k q k q z a z b z H 1 0 1dengan
[ ]
bk q =bk+Δbk dan[ ]
ak q =ak +Δak.k
b
Δ , merupakan perubahan pada koefisien dan secara berurutan,
menunjukkan koefisien terkuantisasi.
k
a
Δ ak bk q
Kuantisasi koefisien menggunakan jumlah bit terbatas dapat mengubah posisi pole dan zero dari H
( )
z pada bidang- . Hal ini dapat menyebabkan : z(1) Ketidakstabilan atau potensi untuk tidak stabil untuk tapis orde tinggi, dengan lebar transisi yang tajam dan pole mendekati unit circle.
(2) Penyimpangan tanggapan frekuensi seperti pada Gambar 2.17.
Gambar 2.17 Efek dari kuantisasi koefisien pada tanggapan frekuensi;
,sebelum kuantisasi; , setelah kuantisasi [1]
Tapis terkuantisasi harus dianalisis untuk mengetahui bahwa wordlenght yang dimiliki cukup untuk menjaga kestabilan dan pendekatan tanggapan frekuensi sesuai dengan yang diharapkan.
Diskusi tentang kestabilan akan dibatasi sampai pada bagian tapis sos. Karakteristik dari sos memliki persamaan
( )
22 1 1
2 2 1 1 0
1 − −
− −
+ +
+ + =
z a z a
z b z b b z
( )
∑
(
)
∑
(
)
= =
− −
= 2
0
2
1
k k
k
kxn k a y n k
b n
y
(
2.33b)
Untuk pole (akar dari denominator) diletakkan di
[
(
)
12]
2 2 1 1
1 4
2 1
a a a
p = − + −
(
2.34a)
[
(
)
12]
2 2 1 1
2 4
2 1
a a a
p = − − −
(
2.34b)
Setiap sos memiliki tiga jenis pole yang muncul, yaitu: pole konjugasi komplek (complex conjugate poles), pole yang real dan unequal, dan pole yang real dan equal (multiple order). Pole konjugasi komplek terjadi jika . Complex pole dan realpole ditunjukkan pada Gambar 2.18.
2 2 1 4a
a <
Gambar 2.18 Segitiga kestabilan menunjukkan letak complex pole, real pole,
dan nilai koefisien-koefisien tapis, a1 dan a2, agar tapis stabil [1]
Pada kasus ini, pole berada pada setiap lokasi pada radius, r, dari tempat asalnya (origin) dan pada sudut
dengan ⎟ ⎠ ⎞ ⎜ ⎝ ⎛− =
= −
r a a
r
2 cos
, 1 1`
2
2 1
θ . Perubahan sekecil apapun pada koefisien
tapis, dan , yang disebabkan kuantisasi koefisien, akan dapat mengubah nilai
k
a bk
r dan θ. Supaya stabil, maka koefisien tapis harus terletak di dalam segitiga kestabilan, atau memenuhi syarat :
0≤ a2 <1
(
2.36a)
a1 ≤1+a2(
2.36b)
Keadaan pertama menyatakan bahwa pole harus terletak di dalam lingkaran jika pole memiliki radius seperti pada persamaan
(
2.35)
.Akibat dari merepresentasikan koefisien dengan bit yang terlalu kecil akan dapat merubah tanggapan frekuensi dari passband dan stopband seperti yang ditunjukkan oleh Gambar 2.17 pada halaman 32. Perubahan pada passband tersebut terutama disebabkan oleh perubahan letak pada pole, sedangkan pada stopband disebabkan oleh perubahan letak pada zero.
Contoh 2.5
Tapis digital bandpass akan digunakan untuk jam digital dengan frekuensi tengah 4.8 kHz dan frekuensi sampling pada 153.6 kHz. Karakteristik tapis mempunyai fungsi transfer berikut :
( )
22 1 1
1
1
− − + +
=
z a z a z
H
Tentukan pengaruh dari kuantisasi koefisien untuk 8 bit pada letak pole sampai batas frekuensi tengah.
Penyelesaian
Langkah pertama adalah menentukan letak pole dari tapis yang belum terkuantisasi. Radius, r, dan sudut, θ, untuk setiap pole adalah
° = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × = = = − 25 . 11 99795 . 0 2 957558 . 1 cos 99795 . 0 995913 . 0 1 θ r
Keadaan ini, nilainya hampir mendekati frekuensi tengah yaitu
kHz 7999 . 4 10 6 . 153 360 25 .
11 ⎟× × 3 =
⎠ ⎞ ⎜
⎝ ⎛
Selanjutnya adalah kuantisasi koefisien menjadi 8 bit. 1 bit sebagai bit tanda, 1 bit sebagai integer dan 6 bit sebagai bagian dari koefisien. Setelah dikuantisasi menjadi 8 bit, nilai koefisien menjadi
00111111 63 2 995913 . 0 10000011 125 2 957558 . 1 6 2 6 1 ≅ = × = ≅ − = × − = a a
Dengan pembagian notasi, nilai dari koefisien terkuantisasi adalah
984375 . 0 64 63 953125 . 1 64 125 2 1 = = − = − = a a
Letak pole yang baru menjadi
REALISASI STRUKTUR TAPIS DIGITAL
INFINITE IMPULSE RESPONSE
Bab ini akan memaparkan perancangan diagram alir program simulasi untuk realisasi struktur tapis IIR. Program dibuat berdasarkan lima tahap utama perancangan tapis IIR seperti yang telah dibahas pada Bab II menggunakan program aplikasi MATLAB®, yaitu :
(1) menentukan spesifikasi tapis (2) menghitung koefisien tapis (3) realisasi struktur tapis
(4) menganalisa finite wordlenght effect
(5) implementasi tapis
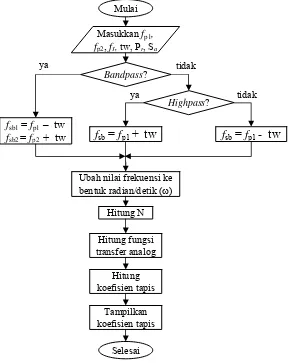
Gambar 3.1 menunjukkan diagram alir lima tahap utama perancangan program simulasi untuk realisasi struktur tapis IIR.
Menentukan spesifikasi tapis Menghitung dan menampilkan
koefisien tapis Menampilkan realisasi struktur Menghitung dan menampilkan
coefficient quantization error
Menampilkan kurva tanggapan frekuensi
Gambar 3.1 Diagram alir perancangan program simulasi untuk realisasi struktur tapis IIR, [1].
Proses perancangan dimulai dengan memasukkan spesifikasi dari tapis yang akan dibuat oleh pengguna. Kemudian menghitung koefisien tapis dari spesifikasi tersebut. Koefisien tersebut selanjutnya direalisasikan ke dalam bentuk struktur tapis yang sesuai. Proses berikutnya adalah menganalisis error yang terjadi. Pada tugas akhir ini, error yang akan dianalisis adalah mengenai coefficient quantization error. Proses akhir dari perancangan adalah menampilkan kurva tanggapan frekuensi untuk tapis IIR.
3.1 Menentukan Spesifikasi Tapis
Spesifikasi tapis merupakan masukan tapis yang terdiri dari jenis tanggapan (lowpass, highpass, atau bandpass), passband edge frequency 1 (fp1), frekuensi
sampling (fs), transition width (tw), passband ripple (Pr), stopband attenuation (Sa),
jumlah bit (bitq) untuk kuantisasi error, dan untuk jenis tanggapan bandpass
ditambahkan passband edge frequency 2 (fp2).
Untuk membuat tapis highpass, maka spesifikasi tapis harus memenuhi syarat tw < fp1. Untuk membuat tapis bandpass, spesifikasi harus memenuhi syarat fp2 > fp1
dan tw < fp1. Sedangkan untuk tapis lowpass tidak ada persyaratan.
Untuk frekuensi sampling, besarnya nilai yang diberikan sedikitnya harus empat kali dari frekuensi terbesar pada spesifikasi tapis, karena pada program aplikasi Matlab®, frekuensi harus dinormalisasi dengan setengah kali frekuensi
sampling.
tapis. Diagram alir untuk proses pemeriksaan masukan ditunjukkan pada Gambar 3.2.
Bandpass?
fp2 = 0 fp2 > fp1?
Lowpass?
tw > fp1?
bit > 1?
Bandingkan nilai fp1, fp2 dan tw
Nilai terbesar simpan dalam variabel fb
fs ≥ 4 ×fb?
Selesai Mulai
ya ya
ya
ya
ya tidak
tidak tidak
tidak
tidak
tidak ya
Masukan nilai fp1, fp2,
tw, fs, Pr, Sa dan bit
Masukan nilai
fp1 dan fp2
Masukan nilai
fp1 dan tw
Masukan nilai fs
Masukan bit
Gambar 3.2 Diagram alir proses pemeriksaan masukan tapis
3.2 Menghitung Koefisien Tapis
maka program akan memanggil fungsi impuls invariant. Diagram alir untuk proses penghitungan koefisien tapis ditunjukkan pada Gambar 3.3.
Mulai
Metode Peletakan Pole-Zero? Panggil fungsi
peletakan pole-zero
Selesai
Panggil fungsi impuls invariant
Tampilkan koefisien tapis
ya tidak
Gambar 3.3 Diagram alir proses penghitungan koefisien tapis
3.2.1 Fungsi Peletakan Pole-Zero
Masukan yang diperlukan adalah passband edge frequency 1 (fp1), passband edge frequency 2 (fp2), frekuensi sampling (fs), dan transition width
(tw). Pertama program akan menghitung frekuensi stopband, fsb, apabila jenis
tanggapan yang dipilih adalah highpass maka fsb untuk HPFadalah
tw f fsb = p1 −
jika jenis tanggapan yang dipilih lowpass, maka fsb untuk LPF adalah
tw f fsb = p2 +
untuk tanggapan BPF, maka akan digunakan fsb1 dan fsb2 seperti berikut
tw f f
tw f f
p sb
p sb
+ =
− =
2 2
Langkah selanjutnya adalah menentukan sudut peletakan zero yang dihitung dengan rumus berikut :
° × = 360
s sb
f f
θ
dan juga sudut peletakan pole dengan rumus berikut :
° × = 1 360
s p
f f
θ
Apabila sudut dari pole sudah diketahui, maka fungsi transfer, , dapat dihitung, sehingga diperoleh koefisien tapis. Diagram untuk fungsi peletakan pole zero ditunjukkan pada Gambar 3.4.
( )
z HGambar 3.4 Diagram alir proses penghitungan koefisien tapis
Masukkan fp1, fp2, fs, tw, Pr, Sa
Bandpass?
fsb1 = fp1 – tw
fsb2 = fp2 + tw fsb = fp1 + tw fsb = fp1 - tw
Tentukan letak zero
Tentukan fungsi transfer Tampilkan koefisien tapis
Mulai
Selesai Tentukan letak pole
Highpass?
ya tidak
3.2.2 Fungsi Impuls Invariant
Masukan yang diperlukan adalah passband edge frequency 1 (fp1),
passband edge frequency 2 (fp2), frekuensi sampling (fs), transition width (tw), passband ripple (Pr), dan stopband attenuation (Sa). Seperti pada fungsi
Peletakan Pole Zero, program akan menghitung frekuensi stopband, fsb, sesuai
dengan jenis tanggapan yang digunakan. Diagram alir untuk fungsi Impuls Invariant dapat dilihat pada Gambar 3.5.
Masukkan fp1, fp2, fs, tw, Pr, Sa
Bandpass?
fsb1 = fp1 – tw
fsb2 = fp2 + tw fsb = fp1 + tw fsb = fp1 - tw
Ubah nilai frekuensi ke bentuk radian/detik (ω)
Hitung N Hitung fungsi transfer analog
Hitung koefisien tapis
Tampilkan koefisien tapis
Mulai
Selesai
Highpass?
ya tidak
ya tidak
3.3 Realisasi struktur
Realisasi struktur tapis IIR yang digunakan dalam tugas akhir ini ada dua, yaitu 1. Struktur bentuk langsung
2. Struktur bentuk kaskade
Diagram alir realisasi struktur tapis IIR dapat dilihat pada Gambar 3.6.
Struktur bentuk langsung?
Ubah koefisien tapis menjadi koefisien
kaskade
Panggil fungsi kuantisasi koefisien
Panggil fungsi kuantisasi koefisien
ans = aq ; bns = bq
Panggil fungsi struktur kaskade Tampilkan Gambar struktur
bentu
![Gambar 2.2 Region of convergence, [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1590303.2056099/30.609.149.525.97.308/gambar-region-of-convergence.webp)
![Gambar 2.3 Bidang-z [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1590303.2056099/32.609.249.407.622.750/gambar-bidang-z.webp)
![Gambar 2.5 Penempatan zero dan tanggapan frekuensi yang dihasilkan [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1590303.2056099/34.609.206.460.194.557/gambar-penempatan-zero-dan-tanggapan-frekuensi-yang-dihasilkan.webp)
![Gambar 2.10( a) Diagram aliran sinyal, [1].](https://thumb-ap.123doks.com/thumbv2/123dok/1590303.2056099/40.609.150.524.91.581/gambar-a-diagram-aliran-sinyal.webp)
![Gambar 2.12( a) Diagram pole zero [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1590303.2056099/44.609.247.410.501.634/gambar-a-diagram-pole-zero.webp)
![Gambar 2.12(b) Tanggapan frekuensi dari diagram pole zero [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1590303.2056099/45.609.243.417.115.232/gambar-b-tanggapan-frekuensi-dari-diagram-pole-zero.webp)
![Gambar 2.14 Elemen-elemen dasar struktur tapis [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1590303.2056099/50.609.238.430.595.739/gambar-elemen-elemen-dasar-struktur-tapis.webp)