BAB 2
LANDASAN TEORI
2.1 Penjadwalan Perawat 2.1.1 Konsep Penjadwalan
Pengertian jadwal menurut kamus besar bahasa Indonesia adalah pembagian
waktu berdasarkan rencana pengaturan urutan kerja; daftar atau tabel kegiatan
atau rencana kegiatan dengan pembagian waktu pelaksanaan yang terperinci.
Sedangkan pengertian penjadwalan adalah proses, cara, perbuatan menjadwalkan
atau memasukkan ke dalam jadwal. Sehingga penjadwalan merupakan proses
pengorganisasian, pemilihan, dan penentuan waktu penggunaan sumber daya yang
ada untuk menghasilkan output seperti yang diharapkan dalam waktu yang diharapkan pula.
Menurut Lismanto (2008: 1), masalah penjadwalan secara umum adalah
aktivitas penugasan yang berhubungan dengan sejumlah kendala yang dapat
terjadi pada suatu periode waktu dan tempat/lokasi sehingga tujuan sebisa
mungkin dapat terpenuhi. Masalah ini dapat ditemui di berbagai bidang organisasi
maupun instansi, seperti rumah sakit dan penerbangan. Pada setiap bidang
kegiatan organisasi, penjadwalan merupakan bagian dari pengambilan keputusan
tentang penyesuaian aktivitas dan sumber daya dalam rangka menyelesaikan
sekumpulan pekerjaan agar tepat pada waktunya dan mempunyai kualitas seperti
yang diinginkan.
Permasalahan yang menyebabkan dibutuhkannya penjadwalan adalah bila
terdapat berbagai macam tugas atau proses yang harus dilakukan, sedangkan
sumber daya (waktu, bahan baku, tenaga kerja, mesin, modal, dan sebagainya)
yang dibutuhkan untuk menyelesaikan tugas-tugas atau proses tersebut terbatas
sehingga diperlukan suatu pengaturan atas pelaksanaan tugas-tugas atau
Maka penjadwalan merupakan bagian yang strategis dari proses perencanaan dan
penugasan kapan pekerjaan harus dimulai, diselesaikan dan pengaturan urutan
kerja serta pengalokasian sumber baik waktu, jumlah tenaga kerja, maupun
fasilitas untuk setiap operasi yang harus diselesaikan.
Secara umum ada dua bentuk penjadwalan yaitu:
1. Penjadwalan manual
Menurut Muhammad (2008: 1) dalam jurnalnya yang berjudul “Penjadwalan Perkuliahan Menggunakan Metode Algoritme Genetika”, penjadwalan
manual dilakukan dengan cara penempatan aktivitas ujian ke dalam slot
waktu dan ruang yang tersedia. Jika jumlah aktivitas ujian dan persyaratan
yang harus dipenuhi jumlahnya sangat besar, maka penyelesaian masalah
penjadwalan ujian akan menjadi rumit dan membutuhkan waktu yang lama.
2. Penjadwalan dengan sistem komputasi
Imam (2012: 177) mengemukakan bahwa penjadwalan dengan menggunakan
sistem komputasi dibagi ke dalam 3 metode, yaitu:
a. Metode optimum yang efisien
Metode ini menghasilkan jadwal optimum dalam waktu yang relatif
singkat. Algoritma yang dikembangkan biasanya untuk permasalahan
yang tidak besar. Yang termasuk dalam metode ini misalnya algoritma
Johnson.
b. Metode optimal numeratif
Metode ini menghasilkan jadwal optimum berdasarkan formulasi
matematis, diikuti oleh metode Branch and Bound, Mixed IntegerLinear Programming, dan DynamicProgramming.
c. Metode heuristik
Metode heuristik melakukan pendekatan suatu solusi optimal.
Dasar dari pengembangan metode heuristik dikategorikan menjadi 3,
yaitu:
1. Penjadwalan dilakukan setiap mesin selesai melakukan proses atau
setiap pekerjaan datang mengantri. Contoh pendekatan ini adalah
2. Pendefenisian struktur neighboorhood dan solusi diperoleh berdasarkan struktur tersebut. Contoh pendekatan ini adalah tabu search, simulated annealing, dan geneticalgorithm.
3. Penjadwalan dilakukan pada setiap mesin. Contoh pendekatan ini
adalah shifting bottleneck procedure.
2.1.2 Permasalahan Penjadwalan
Masalah penjadwalan muncul karena adanya keterbatasan waktu, tenaga kerja,
jumlah mesin, sifat dan syarat pekerjaan yang akan dilaksanakan. Penjadwalan
yang baik dapat dinilai dari kualitas kinerja masing-masing shift.
Dalam membuat suatu penjadwalan akan ditemui beberapa kesulitan.
Menurut Muhammad Syadid (2008: 2), kesulitan tersebut adalah:
1. Persyaratan khusus yang ditambahkan akan menambah lama waktu
komputasi secara polinomial dalam pencarian solusi.
2. Perancangan metode heuristik yang efektif merupakan salah satu pekerjaan
yang tidak mudah untuk dilakukan. Penggunaan prinsip heuristik untuk
memotong ruang pencarian solusi yang tidak perlu, tidak dapat menjamin
solusi yang optimal atau mendekati optimal. Tingkat visibilitas dari
penjadwalan yang dihasilkan sangat dipengaruhi oleh beberapa persyaratan
yang harus dipenuhi. Banyaknya persyaratan yang diajukan akan membuat
masalah terlihat lebih kompleks dan sulit untuk diselesaikan.
3. Masalah penjadwalan sering terbentur dengan persyaratan di dunia nyata
yang tidak dapat direpresentasikan dengan tepat ke dalam sistem.
Secara umum, kinerja shift dipengaruhi oleh kombinasi dari faktor-faktor berikut:
1. Tipe pekerjaan.
Pekerjaaan yang menuntut secara mental (seperti inspeksi dan kontrol
2. Tipe sistem shift.
Gangguan irama tubuh (circadian rhythms) dapat menimbulkan kerugian terhadap kemampuan fisik dan mental pekerja shift, khususnya ketika perubahan shift kerja dan kinerja shift malam yang rendah.
Kinerja shift malam yang rendah dapat dikaitkan dengan: a. Ritme tubuh yang terganggu.
b. Adaptasi yang lambat terhadap kerja shift malam.
c. Pekerja lebih produktif pada shift siang dari pada shift malam.
d. Pekerja membuat sedikit kesalahan dan kecelakaan pada shift siang dari pada shift malam.
e. Kehati-hatian pekerja menurun selama kerja shift malam, khususnya ketika pagi-pagi sekali. Hal ini mungkin penting diperhatikan terutama
untuk tugas-tugas yang memerlukan pengawasan yang terus-menerus
(seperti operator mesin).
f. Jika pekerja tidak mendapatkan tidur yang cukup untuk shift kerja, kinerja menjadi buruk khususnya pekerjaan yang memerlukan tingkat
kehati-hatian yang tinggi.
3. Tipe pekerja.
Untuk contoh, pekerja yang telah berusia tua memiliki kemampuan yang
minimal untuk untuk menstabilkan irama tubuh ketika perubahan shift kerja.
Menurut Siagian (1987) perencanaan yang baik harus memiliki prinsip
mengetahui sifat atau ciri suatu rencana yang baik yaitu:
1. Mempermudah tercapainya tujuan organisasi karena rencana merupakan
suatu keputusan yang menentukan kegiatan yang akan dilakukan dalam
rangka mencapai tujuan.
2. Dibuat oleh orang yang benar-benar memahami tujuan organisasi.
3. Dibuat oleh orang yang sungguh-sungguh mendalami teknik perencanaan.
4. Adanya suatu perincian yang teliti, yang berarti rencana harus segera
diikuti program kegiatan terperinci.
5. Tidak boleh terlepas dari pelaksanaan artinya harus tergambar bagaimana
6. Bersifat sederhana yang berarti disusun secara sistematis dan prioritasnya
jelas terlihat.
7. Bersifat luwes, yang berarti bisa diadakan penyesuaian bila ada perubahan.
8. Terdapat tempat pengambilan resiko karena tidak ada seorangpun yang
mengetahui apa yang akan terjadi pada masa yang akan datang.
9. Bersifat praktis, yang berarti bisa dilaksanakan sesuai dengan kondisi
organisasi.
10.Merupakan prakiraan atau peramalan atas keadaan yang mungkin terjadi.
2.1.3 Konsep Keperawatan
Perawat merupakan tenaga kesehatan yang dominan di rumah sakit baik dari segi
jumlah maupun keberadaannya dalam memberikan pelayanan kesehatan kepada
pasien. Menurut undang-undang tentang keperawatan, keperawatan adalah suatu
bentuk pelayanan profesional yang merupakan bagian integral dari pelayanan
kesehatan, didasarkan pada ilmu dan kiat keperawatan ditujukan kepada individu,
keluarga, kelompok, dan masyarakat baik sehat maupun sakit yang mencakup
seluruh proses kehidupan manusia.
Dalam keperawatan, perawat memiliki peran dan fungsinya
masing-masing.
Peran perawat antara lain:
1. Pelaksana pelayanan perawatan.
2. Pengelola; perawat bertanggung jawab dalam hal administratif
pengelolaan pelayanan perawatan baik di masyarakat maupun di dalam
institusi.
3. Pendidik; perawat bertanggung jawab dalam hal pendidikan kesehatan.
4. Peneliti; perawat melakukan penelitian keperawatan untuk
mengembangkan ilmu dan praktek keperawatan, dan ikut berperan serta
Sedangkan peranan perawat antara lain:
1. Fungsi independen, merupakan fungsi mandiri. Di mana perawat dalam melaksanakan tugasnya tidak memerlukan perintah dokter, dilaksanakan
sendiri dengan keputusan sendiri dalam melakukan tindakan untuk
memenuhi kebutuhan dasar manusia. Tindakan perawat bersifat mandiri
dan tidak tergantung pada orang lain, dengan berdasarkan ilmu tindakan
keperawatan.
2. Fungsi dependen merupakan fungsi perawat dalam melaksanakan kegiatan atas pesan atau intruksi dari perawat lain. Artinya perawat bertindak
membantu dokter dalam memberikan pelayanan medik.
3. Fungsi interdependen. Fungsi ini adalah tindakan perawat berdasarkan kerjasama. Fungsi ini dilakukan dalam kelompok tim yang bersifat saling
ketergantungan di antara tim satu dengan lainnya.
Perencanaan tenaga keperawatan dipengaruhi oleh beberapa faktor antara
lain lingkungan (external change), keputusan, organisasi yang dapat berbentuk pension, pemutusan hubungan kerja (PHK) dan kematian. Perencanaan
ketenagaan merupakan suatu proses yang kompleks yang memerlukan ketelitian
dalam menerapkan jumlah tenaga yang dibutuhkan untuk melaksanakan kegiatan
dalam mencapai tujuan organisasi. Jumlah tenaga yang ada perlu ditata atau
dikelola dalam melaksanakan kegiatan melalui penjadwalan yang sistematis dan
terencana secara matang.
Rumah sakit merupakan instansi yang memiliki kesibukan kerja yang
sangat tinggi. Kesibukan ini akan lebih tampak pada ruangan unit IGD dan rawat
inap di mana pada ruangan ini pengaturan seluruh sumber daya yang meliputi
dokter, perawat, kendaraan ambulan, obat-obatan sampai pengaturan shift jaga harus dioptimalkan.
Mutu pelayanan di rumah sakit sangat ditentukan oleh pelayanan
keperawatan atau asuhan keperawatan. Perawat sebagai pemberi jasa keperawatan
dalam memberikan asuhan keperawatan. Perawat di rumah sakit umumnya dibagi
dalam perawat rawat inap, perawat rawat jalan dan perawat Instalasi Gawat
Darurat. Untuk perawat di ruang rawat inap, khususnya untuk kelas bangsal,
sangat sibuk dan harus siaga selama 24 jam per hari. Untuk itu dibutuhkan jam
kerja yang tinggi oleh perawat yang harus selalu siap berjaga pada shift yang berbeda yaitu pada shift pagi, sore dan malam.
2.1.4 Karakteristik Penjadwalan Perawat
Di dalam rumah sakit keputusan yang paling penting yang harus dibuat di
antaranya adalah perencanaan kebutuhan dan penjadwalan perawat. Ada tiga hal
yang berkaitan dengan proses dan pengambilan keputusan perencanaan
perencanaan kebutuhan dan penjadwalan perawat yaitu:
a. Staffing Decision
Yaitu merencanakan tingkat atau jumlah kebutuhan akan perawat perkualifikasinya.
b. Scheduling Decision
Yaitu menjadwalkan hari masuk dan libur juga shift. Shift kerja untuk setiap harinya sepanjang periode penjadwalan dalam rangka memenuhi kebutuhan
mínimum tenaga perawat yang harus tersedia.
c. Allocation Decision
Yaitu membentuk kelompok perawat untuk dialosikan ke shift-shift atau hari-hari yang kekurangan tenaga kibat adanya variasi demand yang tidak diprediksi, misalnya absennya perawat.
Penjadwalan perawat memiliki karakteristik yang penting, antara lain:
a. Coverage: Jumlah perawat dengan berbagai tingkat yang akan ditugaskan sesuai jadwal berkenaan dengan pemakaian minimum personel perawat
tersebut.
b. Quality: Untuk menilai keadaan pola jadwal.
c. Stability: Bagaimana agar seorang perawat mengetahui kepastian jadwal libur masuk untuk beberapa hari mendatang dan supaya mereka
mempunyai pandangan bahwa jadwal ditetapkan oleh suatu kebijaksanaan
d. Flexibility: Kemampuan jadwal untuk mengantisipasi setiap perubahan-perubahan seperti pembagian full time, part time, rotasi shift dan permanen
shift.
e. Fairness: Alat untuk menyatakan bahwa tiap-tiap perawat akan merasa diberlakukan sama.
Adapun model sederhana penjadwalan perawat di rumah sakit adalah sebagai
berikut:
Misalkan pada suatu ruang di sebuah rumah sakit waktu jaga perawat dalam
sehari dibagi ke dalam 3 shift, yaitu shift pagi, sore dan shift malam. Penjelasan untuk masing-masing shift adalah sebagai berikut:
1. Shift pagi
a. Kebutuhan dalam 1 hari = 7 jam kerja
b. Durasi waktu = antara pukul 7.00 pagi s.d 14.00 sore
2. Shift sore
a. Kebutuhan dalam 1 hari = 7 jam kerja
b. Durasi waktu = antara pukul 14.00 sore s.d 21.00 malam
3. Shift malam
a. Kebutuhan dalam 1 hari = 10 jam kerja
b. Durasi waktu = antara pukul 21.00 malam s.d 7.00 pagi di hari berikutnya.
Dalam memenuhi kebutuhan perawat untuk seluruh shift, haruslah mematuhi peraturan-peraturan yang ada pada rumah sakit.
Karena banyaknya batasan-batasan dalam pembuatan jadwal, hal ini
mengakibatkan hampir tidak ada solusi yang benar-benar feasible
untuk digunakan.
Dalam prakteknya pasti terdapat pelanggaran-pelanggaran terhadap satu
atau beberapa peraturan. Oleh karena itu, batasan-batasan model dibagi ke dalam
dua jenis yaitu:
1. Kendala utama: Merupakan batasan-batasan yang merepresentasikan
peraturan-peraturan kerja yang tidak boleh dilanggar. Contoh kendala utama
dalam secara berturut-turut. Setiap perawat tidak boleh ditugaskan pada
lebih dari empat hari aktif kerja berturut-turut.
2. Kendala tambahan: Merupakan batasan-batasan yang merepresentasikan
peraturan-peraturan kerja yang sewaktu-waktu dapat dilanggar,
namun sebisa mungkin pelanggaran terhadap kendala tambahan tersebut
diminimalkan. Contoh kendala tambahan adalah: Setiap perawat tidak boleh
ditugaskan pada dua shift malam berturut-turut. Setiap perawat tidak boleh ditugaskan pada tiga shift sore berturut-turut.
2.2 Metode Goal programming
2.2.1 Pendahuluan
Goal programming pertama kali diperkenalkan oleh Charnes dan Coopers (1961). Charnes dan Coopers mencoba menyelesaikan persoalan program linier dengan
banyak kendala dengan waktu yang bersamaan. Gagasan itu berawal dari adanya
program linier yang tidak bisa diselesaikan karena memiliki tujuan ganda.
Charnes dan Coopers mengatakan bahwa jika di dalam persamaan linier tersebut
terdapat variable slack dan surplus (variabel deviasi atau penyimpangan) di dalam persamaan kendalanya, maka fungsi tujuan dari persamaan tersebut bisa
dikendalikan yaitu dengan mengendalikan nilai ruas kiri dari persamaan tersebut
agar sama dengan nilai ruas kanannya. Inilah yang menjadi dasar Charnes dan
Coopers mengembangkan metode Goal Grogramming.
Menurut Siswanto (2007:341) model GP merupakan perluasan dari model
pemrograman linear, sehingga seluruh asumsi, notasi, formulasi model matematis,
prosedur perumusan model dan penyelesaiannya tidak berbeda. Perbedaan hanya
terletak pada kehadiran sepasang variabel deviasional yang akan muncul di fungsi
tujuan dan di fungsi-fungsi kendala.
Metode GP juga telah banyak digunakan untuk menyelesaikan berbagai
macam masalah optimasi, termasuk salah satunya adalah masalah penjadwalan
seperti penjadwalan perawat ini dikarenakan oleh kemampuannya untuk bisa
mengolah penyelesaian yang memiliki banyak objektif secara bersamaan.
Pendekatan dasar dari GP adalah menetapkan suatu tujuan yang
dinyatakan dengan angka tertentu dengan untuk setiap tujuan, merumuskan suatu
fungsi tujuan untuk setiap tujuan, kemudian mencari penyelesaian yang
meminimumkan jumlah dari penyimpangan-penyimpangan dalam mencapai
tujuan manajemen. Oleh karena itu, setiap tujuan merupakan bagian dari fungsi
tujuan.
Menurut Mario dalam Sintha (2010: 3), Goal programming adalah suatu metode yang memerlukan informasi untuk menyelesaikan keputusan
permasalahan multiobjektif. Di dalam goal programming yang menjadi prioritas adalah meminimasi variabel penyimpangan dari pada mengoptimalkan kriteria
tujuan. Pendekatan dasar dari goal programming yaitu untuk menerapkan suatu tujuan yang dinyatakan dengan angka untuk setiap tujuan, merumuskan suatu
fungsi tujuan untuk setiap tujuan, serta mencari penyelesaian yang
meminimumkan jumlah penyimpangan-penyimpangan dari fungsi tujuan
masing-masing.
Widandi Soetopo (1992), dalam jurnal “Penerapan Metode Goal
programming dalam Menyelesaikan Model Perencanaan pada Operasi Waduk”,
menggunakan metode goal programming dalam mengoperasikan waduk untuk mengetahui titik-titik kebutuhan sebaik mungkin. Hasilnya adalah pola operasi
waduk dalam bentuk lepasan air bulanan waduk dan volume awal waduk. Dari
penelitian tersebut didapat bahwa kemampuan goal programming untuk memberikan level prioritas yang berbeda pada titik kebutuhan merupakan ciri
tersendiri yang bisa dimanfaatkan.
2.2.2 Model Dasar Goal programming
fungsi tujuan untuk setiap tujuan, dan kemudian mencari penyelesaian yang
meminimumkan jumlah penyimpangan-penyimpangan dari fungsi-fungsi tujuan
terhadap tujuan masing-masing.
Terminologi yang mendasari goal programming adalah:
1. Objektif
Suatu pernyataan yang menyatakan atau mempresentasikan suatu aspirasi atau
keinginan untuk dapat memaksimumkan pemenuhan permintaan dan lain-lain.
2. Tingkat aspirasi atau nilai target
Suatu nilai yang membatasi pencapaian objektif diterima atau ditolak atau
merupakan tingkat pencapaian yang diinginkan untuk setiap atribut atau
objektif.
3. Goal
Suatu pencapaian objektif yang sesuai dengan tingkat aspirasi pengambil
keputusan.
2.2.3 Terminologi Goal programming
Agar memahami dengan baik bidang yang dipelajari, pembaca harus mengerti
istilah-istilah dan lambang-lambang yang digunakan orang dalam goal programming, yaitu:
1. Decision Variable
Seperangkat variabel yang tak diketahui (dalam model Goal programming
dilambangkan dengan , di mana yang akan dicari
nilainya). biasanya disebut juga variabel keputusan.
2. Right hand side values (RHS)
Nilai-nilai yang biasanya menunjukkan ketersediaan sumber daya
(dilambangkan dengan ) yang akan ditentukan kekurangan atau kelebihan
penggunanya (nilai sisi kanan).
3. Goal
Keinginan untuk meminimumkan angka penyimpangan dari suatu nilai RHS
4. Goal Constraint
Sinonim dari istilah goal equation, yaitu suatu tujuan yang diekspresikan dalam persamaan matematik yang memasukkan variabel simpangan
(kendala tujuan).
5. Preemtive Priority Factor
Suatu sistem urutan yang dilambangkan dengan , di mana
menunjukkan banyaknya tujuan dan model yang
memungkinkan tujuan-tujuan disusun secara ordinal dalam model linear goal programming. Sistem urutan ini menempatkan tujuan-tujuan dalam susunan denganhubungan sebagai berikut:
> > … >
Keterangan:
merupakan tujuan paling penting.
merupakan tujuan yang kurang penting dan seterusnya.
6. Deviational variable
Variabel-variabel yang menunjukkan kemungkinan penyimpangan negatif
dari suatu nilai RHS kendala tujuan (dalam model linear goal programming
dilambangkan dengan, di mana dan adalah banyaknya
kendala tujuan dalam model) atau penyimpangan positif dari suatu nilai.
RHS (dilambangkan dengan variabelvariabel ini sama dengan slackvariable
dalam linear goal programming (variabel simpangan). a. Variabel Deviasi Negatif
Variabel deviasi negatif berfungsi untuk menampung deviasi yang
berbeda di bawah tujuan yang dikehendaki dan tercermin pada nilai
ruas kanan suatu kendala tujuan. Dengan kata lain variabel ini berfungsi
untuk menampung deviasi negatif. Digunakan notasi untuk
menandai jenis variabel deviasi ini, karena variabel deviasi ini
fungsinya yang menampung variabel negatif dan akan selalu
berkoefisien +1 pada setiap kendala tujuan sehingga bentuk umum
atau dapat ditulis juga dengan:
Dengan
b. Variabel Deviasi Positif
Variabel deviasi positif berfungsi untuk menampung deviasi yang
berada di atas tujuan yang dikehendaki. Dengan kata lain variabel
deviasi ini berfungsi untuk menampung deviasi positif. Digunakan
notasi untuk menandai variabel ini karena variabel ini menampung
deviasi positif dan akan selalu berkoefisien -1 pada setiap kendala
tujuan sehingga kendalanya adalah:
atau dapat ditulis juga dengan:
Dengan
Dengan demikian jelas bahwa kedua jenis variabel mendekati sebuah
garis kendala dari dua arah yang berlawanan. Secara matematika hal
Atau
Karena nilai minimum dan adalah nol maka persamaan di atas
akan terpenuhi apabila:
1. = , sehingga
Artinya tujuan tercapai
2. dan , sehingga
Artinya tujuan tidak tercapai karena
3. dan sehingga
Artinya akan terlampaui karena
Jadi jelas bahwa kondisi di mana dan pada sebuah kendala
7. Differential Weight
Timbangan matematika yang diekspresikan dengan angka Kardinal
(dilambangkan dengan di mana dan
dan digunakan untuk membedakan variabel simpangan di dalam suatu
tingkat prioritas (bobot).
8. Techological Coefficient
Nilai-nilai numerik (dilambangkan dengan ) yang menunjukkan
penggunaan nilai per unit untuk menciptakan (koefisien teknologi).
2.2.4. Metode Penyelesaian dalam Goal programming
Menurut Ignizio (1982), formulasi model GP secara umum ada tiga fungsi tujuan
yang dimungkinkan, yaitu:
1. Tujuan 1 sisi bawah, yaitu menentukan batas bawah yang solusinya tidak
boleh kurang dari itu (boleh lebih dari batas). Fungsinya adalah:
2. Tujuan 1 sisi atas, yaitu menentukan batas atas yang solusinya tidak boleh
melebihi itu (boleh kurang dari batas). Fungsinya adalah:
3. Tujuan 2 sisi, yaitu menentukan target yang diinginkan yang solusinya
tidak boleh meleset dari itu. Fungsinya adalah:
dengan fungsi tujuan dan tingkat aspirasi.
Menurut Siswanto (2007: 342), pada model pemrograman linear
kendala-kendala fungsional menjadi pembatas bagi usaha pemaksimuman atau
peminimuman fungsi tujuan, maka pada model goal programming kendala-kendala itumerupakan sasaran yang hendak dicapai.
Ada beberapa cara dalam pengelompokan GP. Salah satu cara yang umum
digunakan adalah pengelompokan berdasarkan tingkat kepentingan tujuan.
2 jenis model, yaitu nonpreemptive Goal programming dan preemptive Goal programming. Cara penyelesaian kedua metode berbeda dan belum tentu menghasilkan solusi yang sama untuk permasalahan yang sama. Pada tugas akhir
ini fungsi tujuan tidak dibedakan menurut prioritas atau bobot
2.2.5 Komponen Goal Programming
Dalam metode Goal programming pada umumnya terdapat minimal tiga komponen yaitu fungsi tujuan, kendala tujuan dan kendala nonnegatif, namun
pada tulisan ini akan dibahas juga kendala struktural.
a) Fungsi Tujuan
Fungsi tujuan dalam Goal programming pada umumnya adalah masalah minimasi karena dalam model Goal programming terdapat variabel deviasi di dalam fungsi tujuan yang harus diminimumkan. Hal ini merupakan
konsekuensi logis dari kehadiran variabel deviasi dalam fungsi kendala tujuan.
Sehingga fungsi tujuan dalam Goal programming adalah minimasi penyimpangan atau minimasi variabel deviasi.
Ada tiga jenis fungsi tujuan dalam Goal programming, yaitu:
Fungsi tujuan ini digunakan apabila variabel deviasi dalam suatu
masalah tidak dibedakan menurut prioritas atau bobot.
Fungsi tujuan ini digunakan apabila urutan dari tujuan diperlukan,
tetapi variabel deviasi setiap tingkat priorotas dari tujuan memiliki
Fungsi tujuan ini digunakan apabila tujuan-tujuan diurutkan
berdasarkan prioritas dan variabel deviasi pada setiap tingkat prioritas
dibedakan dengan diberikan bobot yang berlainan .
Fungsi tujuan ini digunakan apabila tujuan-tujuan diurutkan
berdasarkan prioritas dan bobot.
b) Kendala Tujuan
Dalam model Goal programming ditemukan sepasang variabel yang disebut variabel deviasi dan berfungsi untuk menampung penyimpangan atau deviasi
yang akan terjadi pada ruas kiri suatu persamaan kendala terhadap nilai ruas
kanannya. Agar deviasi ini minimum, artinya ruas kiri suatu persamaan
kendala sedapat mungkin mendekati nilai ruas kanannya maka variabel
deviasi ini harus diminimumkan dalam fungsi tujuan.
Pemanipulasian model Goal programming yang dilakukan oleh Charnes Cooper telah mengubah makna kendala fungsional. Pada program linier,
kendala-kendala fungsional menjadi pembatas bagi usaha pemaksimuman atau
peminimuman fungsi tujuan. Sedangkan pada goal programming kendala-kendala merupakan sarana untuk mewujudkan tujuan yang hendak dicapai.
Tujuan-tujuan yang dinyatakan sebagai nilai konstan pada ruas kanan
kendala, mewujudkan suatu tujuan berarti mengusahakan agar nilai ruas kiri suatu
persamaan kendala sama dengan nilai ruas kanannya. Itulah sebabnya
Bentuk persamaan kendala tujuan secara umum:
Dan dikonversikan secara umum menjadi:
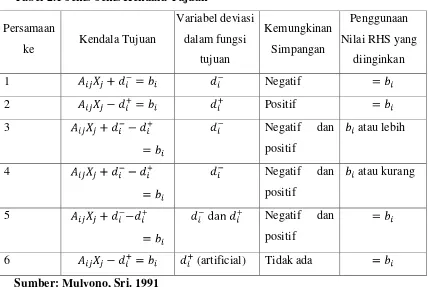
Ada enam jenis kendala tujuan yang berlainan. Maksud setiap jenis
kendala itu ditentukan oleh hubungannya dengan fungsi tujuan. Jenis-jenis
kendala tersebut disajikan di tabel berikut:
Tabel 2.1 Jenis-Jenis Kendala Tujuan
Persamaan
dengan pertidaksamaan dalam masalah program linier maksimasi, persamaan
kedua sama dengan pertidaksamaan dalam program linier minimasi. Sedangkan
persamaan ketiga sampai kelima semuanya memperoleh penyimpangan dua arah,
dengan Ini serupa dengan kendala persamaan program linier, tetapi tidak
menempel pada solusi karena dimungkinkan adanya penyimpangan negatif dan
positif. Jika kendala persamaan dianggap perlu dalam perumusan model goal programming, kendala dapat dimasukkan dengan menempatkan sebuah artificial
variabel , seperti pada persamaan keenam. Persamaan memperbolehkan adanya
penyimpangan positif dan negatif dari nilai RHS-nya. Dalam kendala program
linier tak ada pembanding untuk persamaan ketiga dan keempat.
c) Kendala Nonnegatif
Dalam program linier, variabel-variabel bernilai lebih besar atau sama dengan nol.
Demikian halnya dengan Goal programming yang terdiri dari variabel keputusan dan variabel deviasi. Keduanya bernilai lebih besar atau sama dengan nol.
Pernyataan nonnegatif dilambangkan dengan:
d) Kendala Struktural
Kendala struktural adalah kendala-kendala lingkungan yang tidak berhubungan
langsung dengan tujuan-tujuan masalah yang dihadapi. Variabel deviasi tidak
dikatakan kendala struktural karena kendala struktural tidak diikutsertakan dalam
fungsi tujuan.
2.2.6 Pemodelan Goal Programming
Keterangan: = deviasi (penyimpangan) positif
= deviasi (penyimpangan) negatif
= koefisien fungsi kendala tujuan
= variabel pengambilan keputusan
= tujuan atau target yang ingin dicapai
= koefisien fungsi kendala sistem
= sumber daya yang tersedia
2.2.7 Kelebihan dan Kekurangan Goal Programming
Secara umum kelebihan goal programming adalah: a. Setiap tujuan direpresentasikan dalam model.
b. Semua tujuan dapat dimasukkan dalam model.
c. Pengambil keputusan didorong untuk mengestimasi level aspirasi
tujuantujuan dalam model. Hal ini memberikan pertimbangan lebih
mendalam dalam penyusunan model. Pendekatan ini dapat diaplikasikan
dalam lingkup permasalahan yang penting dan praktis termasuk perkiraan
dan pengujian suatu kurva, pengenalan, dan klasifikasi pola, dan analisa
kluster.
d. Dapat diselesaikan dengan linear programming.
Beberapa kelemahan yang dimiliki oleh goal programming:
a. Perlu waktu lebih untuk membentuk model.
b. Keterlibatan pengambil keputusan lebih banyak berkaitan dengan
penentapan level aspirasi, prioritas, bobot, dan lain-lain.
c. Pertimbangan yang sifatnya subyektif terhadap penetapan prioritas dan
2.3 Perumusan Masalah Goal programming
Langkah-langkah perumusan permasalahan Goal Programming adalah:
i. Penentuan variabel keputusan, merupakan dasar dalam pembuatan model
keputusan untuk mendapatkan solusi yang dicari. Makin tepat penentuan
variabel keputusan akan mempermudah pengambilan keputusan yang dicari.
ii. Penentuan fungsi tujuan, yaitu tujuan yang ingin dicapai oleh perusahaan.
iii. Perumusan fungsi sasaran, di mana setiap tujuan pada sisi kirinya
ditambahkan dengan variabel simpangan, baik simpangan positif maupun
simpangan negatif.
iv. Penentuan prioritas utama. Pada langkah ini dibuat urutan dari tujuan-tujuan.
Penentuan tujuan ini tergantung pada hal-hal berikut:
a. Keinginan dari pengambil keputusan.
b. Keterbatasan sumber-sumber yang ada.
v. Penentuan pembobotan. Pada tahap ini merupakan kunci dalam menentukan
urutan dalam suatu tujuan dibandingkan dengan tujuan yang lain.
vi. Penentuan fungsi pencapaian. Dalam hal ini, yang menjadi kuncinya adalah
memilih variabel simpangan yang benar untuk dimasukkan dalam fungsi
pencapaian. Dalam memformulasikan fungsi pencapaian adalah
menggabungkan setiap tujuan yang berbentuk minimasi variabel
penyimpangan sesuai dengan prioritasnya.
vii. Penyelesaian model Goal programming dengan metodologi solusi.
2.4 Metode Penyelesaian Goal Programming
Ada tiga metode yang dapat digunakan untuk menyelesaikan model Goal programming, yaitu metode grafis, metode algoritma simpleks, dan menggunakan bantuan software. Dalam hal ini penulis menggunakan software LINDO.
a. Metode Grafis
Metode grafis digunakan untuk menyelesaikan masalah Goal programming dengan dua variabel. Langkah-langkah penyelesaian dengan metode grafis
adalah:
1. Menggambarkan fungsi kendala pada bidang kerja sehingga diperoleh
2. Meminimumkan variabel deviasional agar sasaran-sasaran yang diinginkan
tercapai dengan cara menggeser fungsi atau garis yang dibentuk oleh
variabel deviasional terhadap daerah yang memenuhi kendala
b. Metode Algoritma Simpleks
Algoritma simpleks dapat digunakan untuk menyelesaikan masalah Goal programming dengan menggunakan variabel keputusan yang lebih dari dua. Langkah-langkah penyelesaian Goal programming dengan metode algoritma simpleks adalah:
1. Membentuk tabel simpleks awal.
2. Pilih kolom kunci (kolom pivot) yang memiliki nilai negatif
terbesar.
3. Pilih baris yang berpedoman pada dengan rasio terkecil di mana
adalah nilai sisi kanan dari setiap persamaan. Baris kunci ini disebut
baris pivot.
4. Mencari nilai elemen yang pivot bernilai 1 dan elemen lain yang
bernilai nol dengan cara mengalikan baris pivot dengan -1 lalu
menambahkannya dengan semua elemen dibaris pertama. Dengan
demikian diperoleh tabel simpleks iterasi I.
5. Memeriksaan optimalitas, yaitu melihat apakah solusi sudah layak atau
tidak. Solusi dikatakan layak bila variabel adalah positif atau nol.
c. Menggunakan Program Komputer
Penyelesaian model Goal programming dapat juga menggunakan bantuan program komputer, contohnya LINGO, LINDO dan POM-QM for Windows. Namun pada tulisan ini hanya dibahas tentang langkah-langkah penyelesaian
menggunakan LINGO.
LINDO (Linear Ineraktive Discrete Optimizer) adalah software yang dapat digunakan untuk mencari penyelesaian dari masalah pemrograman linear.
Prinsip kerja utama LINDO adalah memasukkan data, menyelesaikan,
serta menaksirkan kebenaran dan kelayakan data berdasarkan
penyelesaiannya. Menurut Linus Scharge (1991), Perhitungan yang
digunakan pada LINDO pada dasarnya menggunakan metode simpleks.
Sedangkan untuk menyelesaikan masalah pemrograman linear integer
nol-satu software LINDO menggunakan Metode Branch and Bound (metode Cabang dan Batas) menurut Mark Wiley (2010).
Untuk menentukan nilai optimal dengan menggunakan LINDO diperlukan
beberapa tahapan yaitu:
1. Menentukan model matematika berdasarkan data real
2. Menentukan formulasi program untuk LINDO
3. Membaca hasil report yang dihasilkan oleh LINDO.
Perintah yang biasa digunakan untuk menjalankan program LINDO adalah:
1. MAX, digunakan untuk memulai data dalam masalah maksimasi;
2. MIN, digunakan untuk memulai data dalam masalah minimasi;
3. END, digunakan untuk mengakhiri data;
4. GO, digunakan untuk pemecahan dan penyelesaian masalah;
5. LOOK, digunakan untuk mencetak bagian yang dipilih dari data yang
ada;
6. GIN, digunakan untuk variabel keputusan agar bernilai bulat;
7. INTE, digunakan untuk menentukan solusi dari masalah biner;
8. INT, sama dengan INTE;
9. SUB, digunakan untuk membatasi nilai maksimumnya;
10.SLB, digunakan untuk membatasi nilai minimumnya;
11.FREE, digunakan agar solusinya berupa bilangan real.
Kegunaan utama dari program LINDO adalah untuk mencari penyelesaian
dari masalah linier dengan cepat dengan memasukan data yang berupa rumusan
dalam bentuk linier. LINDO memberikan banyak manfaat dan kemudahan dalam
memecahkan masalah optimasi dan minimasi. Berikut ini cara memulai
klik dua kali pada LINDOw32, tunggu sampai muncul dialog lalu klik OK,
LINDO sipa dioperasikan. Pada layar akan muncul untitled baru yang siap untuk tempat mengetikkan formasi.
Gambar 2.1. Tampilan LINDO
Model LINDO minimal memiliki tiga syarat:
1. memerlukan fungsi objektif;
2. variabel;
3. batasan (fungsi kendala).
Untuk syarat pertama fungsi objektif, bisa dikatakan tujuan. Tujuan disini
memiliki dua jenis tujuan yaitu maksimasi (MAX) dan minimasi (MIN). Kata
pertama untuk mengawali pengetikan formula pada LINDO adalah MAX atau
MIN. Formula yang diketikan ke dalam untitled (papan editor pada LINDO) setelah MAX atau MIN disebut fungsi tujuan. Secara umum dapat dituliskan
sebagai berikut.
Fungsi tujuan model matematika
Min/Maks Z = C1X1+C2X2+. . . +CnXn
MIN C1X1+C2X2+. . . +CnXn
atau
MAX C1X1+C2X2+. . . +CnXn
Untuk syarat kedua adalah variabel. Variabel ini sangat penting, LINDO tidak
dapat dijalankan tanpa memasukkan variabel dalam formula.
Untuk syarat ketiga setelah fungsi objektif dan variabel selanjutnya adalah
batasan Dalam kenyataannya variabel tersebut pasti memiliki batasan, batasan itu
misalnya keterbatasan bahan, waktu, jumlah pekerja, biaya operasional. Setelah
fungsi objektif diketikkan selanjutnya diketikkan Subject to atau ST untuk mengawali pengetikan batasan dan pada baris berikutnya baru diketikkan batasan
yang ada diakhir batasan kita akhiri dengan kata END . Secara umum dapat
untuk pengetikkan fungsi kendala ke dalam untitled adalah sebagai berikut. SUBJECT TO
a11X1+a12X2+. . .+C1nXn <= b1
a11X1+a22X2+. . .+C2nXn <= b2
am1X1+am2X2+. . .+CmnXn <= bm
X1>= 0
X2>= 0
Xn>= 0
END
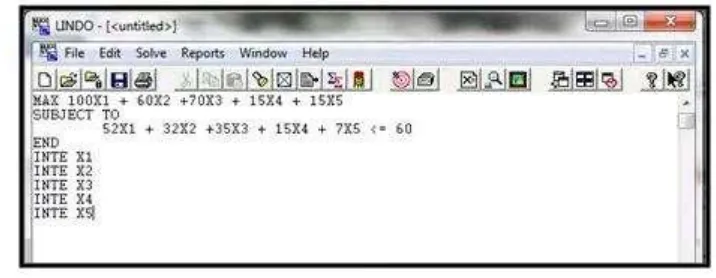
Contoh :
Dengan fungsi kendala
52x1 + 23x2 + 35x3 + 15x4 + 7x5 ≤ 60
xi = for i = 1, 2, …, 5
dalam formula diketikan dengan:
MAX 100X1 + 60X2 +70X3 + 15X4 + 15X5
SUBJECT TO
52X1 + 32X2 +35X3 + 15X4 + 7X5 <= 60
END
INTE X1
INTE X2
INTE X3
INTE X4
INTE X5
Keseluruhan formulasi yang dapat diketikkan ke dalam untitled LINDO seperti pada gambar berikut.
Gambar 2.2 Formulasi pada LINDO
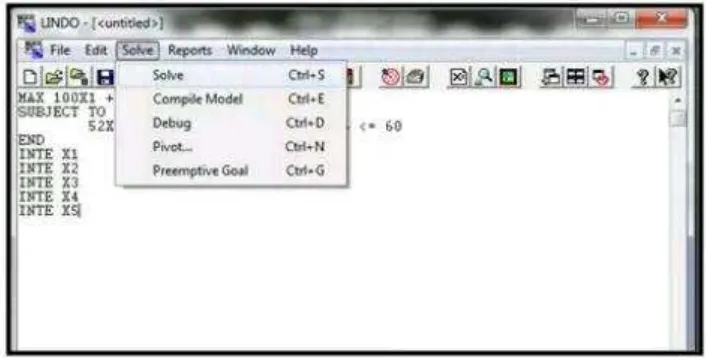
Setelah formula diketikkan siap dicari solusinya dengan memilih perintah Solve
atau mengklik tombol Solve pada toolbar . LINDO akan mengoreksi kesalaha pada formula terlebih dahulu. Jika terjadi kesalahan dalam pengetikan (tidak dapat
dibaca oleh komputer) akan muncul kotak dialog dan kursor akan menunjukkan
Gambar 2.3 Menu Solve
Menu Solve digunakan untuk menampilkan hasil secara lengkap dengan beberapa pilihan berikut:
1. Solve-Solve, digunakan untuk menampilkan hasil optimasi dari data pada papan editor dan secara lengkap. Pada tampilan hasil mencangkup nilai
variabel keputusan serta nilai dual price-nya. Pada nilai peubah keputusan ditampilkan pula nilai peubah keputusan yang nol. Perbedaannya dengan
Report Solution adalah pada Report Solution kadang-kadang jawabannya tidak optimal interasinya, sehingga pada Solve-Solve jawaban yang ditampilkan bernilai optimal. Report Solution tidak menampilkan nilai
Dual Price serta ada pilihan apakah perlu ditampilkan nilai peubah keputusan yang nol.
2. Solve-Compile Model, digunakan untuk mengecek apakah struktur penyusunan data pada papan editor data sudah benar. Jika penulisannya
tidak benar, maka akan ditampilkan pada baris ke-berapa kesalahan
tersebut terdapat. Jika tidak ada kesalahan, maka proses dapat dilanjutkan
untuk mencari jawaban yang optimal.
3. SolvePrivot, digunakan untuk menampilkan nilai slack.
4. Solve Debug, digunakan untuk mempersempit permasalahan serta mencari pada bagian mana yang mengakibatkan solusi tidak optimal, selanjutnya
Gambar 2.4 Tampilan Sensitifitas Analisis
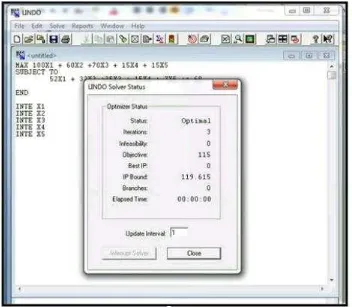
Jika tidak terjadi kesalahan akan muncul status LINDO. Status ini berguna untuk
memonitor proses solusi.
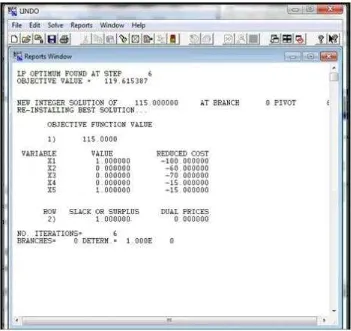
Selanjutnya tekan close dan pada LINDO akan muncul tampilan baru yang disebut report windows . Dalam report ini adalah 115 dengan x1 = x5 = 1 dan x2
Gambar 2.5 Tampilan Report Solusi LINDO
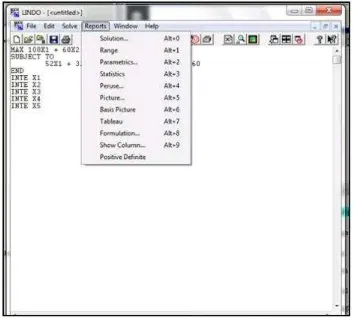
Untuk tampilan pada report diatur sesuai dengan kebutuhan. Pengaturan report
Gambar 2.6 Tampilan Perintah Report Program LINDO
Dalam menu report terdapat beberapa pilihan sebagai berikut:
1. Report Solution, digunakan untuk mendapatkan solusi optimal dari permasalahan program linier yang tersaji pada papan editor data.
2. Report Range, digunakan untuk menayangkan hasil penyelesaian analisis sensivitas. Pada analisis sensivitas yang ditayangkan mencakup aspek
Allowable Increase dan Allowable Decrease.
3. Report Parametrics, digunakan untuk mengubah dan menampilkan hasil hanya pada baris kendala tertentu saja.
4. Report Statistics, digunakan untuk mendapatkan laporan kecil pada papan
editor report.
5. Report Peruse, digunakan untuk menampilkan sebagian dari model atau jawaban.
7. Report Basis Picture, digunakan untuk menampilkan text format dari nilai basis, dan disajikan sesuai urutan baris dan kolom.
8. Report Table, digunakan untuk menampilkan tabel simpleks dari model yang ada.
9. Report Formulation, digunakan untuk menampilkan model pada papan editor data ke papan editor report .
10.Report Show Coloum, digunakan untuk menampilkan koefisien peubah.