i
Daftar Isi
1.
Pengetahuan Dasar GNSS Geodetik ... 0
1.1
Pengertian GNSS ... 2
1.2
Prinsip Dasar Penentuan Posisi dengan GNSS ... 2
1.3
Klasifikasi Receiver GNSS ... 4
1.4
Sinyal GNSS ... 5
1.5
Perencanaan Persiapan Survey GNSS ... 6
2.
Metode Penentuan Posisi Dengan GNSS Geodetik ... 9
2.1
Metode Penentuan Posisi ... 11
2.2
Metode Pengamatan Absolute ... 12
2.3 Metode Pengamatan Diferensial ... 12
2.4
Metode Pengukuran Statik ... 13
2.5
Metode Pengukuran Statik Singkat ( Rapid Static ) ... 14
2.6
Metode Pengukuran Statik PPP (Precise Point Positioning) Post Process ... 15
2.7
Metode Pengukuran Kinematik ... 15
2.8
Metode Pengukuran Stop-and-Go ... 16
2.9
Metode Pengukuran Real Time Precise Point Positioning (RT-PPP) ... 17
2.10 Pengolahan Data Pada Pengukuran GNSS Geodetik ... 19
3.
Komponen Sistem Hardware dan Software GNSS Geodetik ... 19
3.1
Komponen Peralatan Dalam Survey GNSS Geodetik ... 20
3.1.1
Hardware Receiver Trimble NetR9 ... 20
3.1.2
Hardware Receiver Trimble R4 ... 23
3.1.3
Hardware Data Collector Trimble Slate Controller ... 24
3.1.4
Software Pengambil Data - Trimble Access ... 25
3.1.5
Software Pengolah Data – Trimble Business Center ... 25
4.
Konfigurasi Peralatan Survey GNSS Geodetik ... 26
4.1
Konfigurasi Trimble NetR9 Melalui Display Receiver ... 28
a)
Pengaturan Receiver Sebagai Base Station... 28
b)
Mengubah Nama dan deskripsi Base Station ... 28
c)
Pada Tampilan Kode Base Station : ... 29
d)
Input Koordinat Titik Referensi ... 29
ii
Daftar Isi
f) Penentuan Tinggi Antenna ... 29
g)
Format Output Koreksi ... 30
h)
Data Logging / Perekaman Data ... 30
i) Mengaktifkan Logging Session ... 31
j) Konfigurasi Setting Ethernet ... 41
4.2
Konfigurasi Trimble Net R9 Melalui Web Interface ... 42
4.3
Konfigurasi Trimble R4 ... 43
4.4
Konfigurasi Receiver menggunakan GPS Configurator Software ... 45
4.5
Winflash Utility Software ... 46
4.6
Upgrade Firmware ... 46
4.7
Konfigurasi Software Pengambil Data Lapangan Trimble Access ... 48
5. Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio ... 52
5.1 Trimble Net R9 Sebagai
Mobile Base station
... 53
5.2
Trimble R4 Sebagai Rover Station ... 59
5.1.1
Pengaturan Survey Syle RTK Radio ... 60
5.1.2
Pembuatan File Baru (Jobs) ... 62
5.1.3
Melakukan Export dan Import Data ... 63
6. Konfigurasi Trimble Net R9 dan Trimble R4 Untuk Pengukuran Metode Statik ... 52
6.1
Konfigurasi Trimble NetR9 Untuk Pengukuran Statik ... 53
6.2 Konfigurasi Trimble R4 Untuk Pengukuran Statik Pada Trimble Slate Controller ... 58
6.2.1
Pengaturan Survey Style Statik ... 58
6.2.2
Pembuatan File Baru ( Jobs ) ... 59
6.2.3
Melakukan Pengukuran ( Measure ) ... 59
6.2.4
Proses Download Data Pengamatan ke Komputer ... 60
7. Pengolahan Data dengan Trimble Business Center ... 62
7.1
Pengolahan Baseline GNSS dengan Metode Post-Processing ... 63
7.2
Setting Project Baru ... 64
7.2.1 Membuat project... 64
7.2.2 Memilih settingan project ... 65
7.3
Import GNSS data ... 67
7.3 1 Import GNSS static data ... 67
7.3.2 Memilih GNSS Control Data ... 68
iii
Daftar Isi
7.4.2 Processing Baseline ... 70
7.4.5 Edit a session and reprocess a baseline ... 71
7.5
Adjusting The Network ... 72
iv
Daftar Isi
Daftar Gambar
Gambar 1 : Prinsip dasar penentuan posisi dengan GNSS (pendekatan vektor) ... 2
Gambar 2 : Prinsip dasar penentuan posisi dengan GNSS ... 3
Gambar 3 : Sistem koordinat GNSS ... 3
Gambar 4 : Klasifikasi Receiver GNSS ... 4
Gambar 5 : Macam Tipe GNSS ... 5
Gambar 6: Informasi yang dikandung sinyal GNSS ... 5
Gambar 7 : Parameter Perencanaan Survey GNSS (Hasanuddin Z. Abidin 1994) ... 7
Gambar 8 : Metode Penentuan Posisi dengan GNSS ... 11
Gambar 9 : Metode Pengamatan Absolute Statik dan Kinematik ( Hassanuddin Z. Abidin ,
2006) ... 12
Gambar 10: Metode pengamatan diferensial (Hasanuddin Z. Abidin 1994) ... 13
Gambar 11 : Metode Pengukuran Statik (Hasanuddin Z. Abidin 1994) ... 14
Gambar 12 : Metode Pengukuran Statik yang dipadukan dengan statik singkat ... 14
Gambar 13 : Metode Pengukuran Statik PPP (Precise Point Positioning) Online Post Process ... 15
Gambar 14 : Metode Pengukuran Kinematik secara post-proses maupun real-time ... 16
Gambar 15 : Contoh metode pengukuran stop-and-go ... 17
Gambar 16 : Metode pengukuran Statik dan Kinematik PPP (Precise Point Positioning)
Real-Time ... 18
Gambar 17 : Informasi dari satelit yang diperoleh stasiun referensi secara global (Trimble,
2012) ... 18
Gambar 18 : Diagram alur proses Precise Point Positioning Real - Time (Trimble, 2012) ... 19
Gambar 19 : Alur pengolahan data pada GNSS... 19
Gambar 20 : GNSS Geodetik Trimble NetR9 ... 21
Gambar 21 : Jaringan Permanen Base Station Global Milik Trimble ... 22
Gambar 22 : GNSS Receiver Trimble R4 ... 23
Gambar 23 : Data Collector - Trimble Slate Controller ... 24
Gambar 24 : Tampilan Menu Utama Software Trimble Access ... 25
Gambar 25 : Tampilan Pada Software Trimble Business Center ... 26
v
Daftar Isi
Gambar 28 : Bar Web Browser ... 42
Gambar 29 : Kotak Dialog Input Username dan Password ... 42
Gambar 30 : Tampilan awal web browser Trimble Net R9 ... 43
Gambar 31 : Tampilan control panel Trimble R4 ... 43
Gambar 32: GNSS Configurator pada Daftar Program ... 45
Gambar 33 : Pilihan Merk Alat yang akan dikoneksikan dengan GNSS Configurator ... 45
Gambar 34 : Pilihan Jenis Alat Trimble ... 46
Gambar 35 : Membuka GNSS Software yang terinstall ... 47
Gambar 36 : Melihat Firmware yangsudah terinstal pada Receiver R4 ... 47
Gambar 37 : Menampilkan semua settingan dari firmware Trimble R4 ... 48
Gambar 38: Tampilan Menu Utama Trimble Access ... 50
Gambar 39 : Trimble NetR9 dan Kelengkapan lainnya ... 54
Gambar 40 : Trimble NetR9 sebagai Mobile Base Station ... 54
Gambar 41 : Display Receiver NetR9 untuk Jumlah Satelit ... 55
Gambar 42 : Display Receiver Net R9 untuk Setting Base Station (a) ... 55
Gambar 43 : Display Receiver Net R9 untuk Setting Base Station (b)... 55
Gambar 44 : Eksternal Radio ADL Pacific Crest ... 58
Gambar 45 : TrimbleR4 sebagai Rover ... 59
Gambar 46 : Pengukuran RTK Radio di Lapangan ... 59
Gambar 47 : Pengaturan Survey Style RTK Radio pada Controller dengan Trimble Access ... 60
Gambar 48 : Pengaturan Rover Option RTK Radio pada Controller dengan Trimble Access (a) .. 60
Gambar 49 : Pengaturan Rover Option RTK Radio pada Controller dengan Trimble Access (b) .. 60
Gambar 50 : Pengaturan Rover Radio RTK Radio pada Controller dengan Trimble Access ... 61
Gambar 51 : Pengaturan Rover Radio RTK Radio pada Controller dengan Trimble Access ... 61
Gambar 52 : Survey Style RTK Radio yang sudah dibuat ... 61
Gambar 53 : Pembuatan File Baru untuk RTK Radio ... 62
Gambar 54 : Melakukan Pengukuran RTK Radio (a) ... 62
Gambar 55 : Melakukan Pengukuran RTK Radio (b) ... 63
Gambar 56 : Melakukan Pengukuran RTK Radio (c) ... 63
Gambar 57 : Proses Export Data Lapangan dengan Trimble Access ... 63
Gambar 58 : Proses Export Data Lapangan dengan Trimble Access ... 64
vi
Daftar Isi
Gambar 60 : Display Receiver Trimble Net R9 ... 53
Gambar 61 : Ilustrasi Pengukuran Statik ... 54
Gambar 62 : Melakukan Logging Data di NetR9 ... 57
Gambar 63 : Pengaturan Survey Style Statik pada Controller dengan Trimble Access ... 58
Gambar 64 : Pengaturan Rover Option Statik pada Controller dengan Trimble Access ... 58
Gambar 65 : Survey Style Statik yang sudah dibuat ... 59
Gambar 66 : Pembuatan File Jobs Statik Pada Controller ... 59
Gambar 67 : Melakukan Pengukuran Statik pada Controller (a) ... 59
Gambar 68 : Melakukan Pengukuran Statik pada Controller (b) ... 60
Gambar 69 : Proses Koneksi dengan Data Collector ... 60
Gambar 70 : Folder pada data collector ... 60
Gambar 71 : Folder penyimpanan data lapangan ... 60
Gambar 72 : Data mentah T02 ... 61
Gambar 73 : Proses Pemindahan Data Pengamatan ke Komputer (c) ... 61
Gambar 74 : Template baru pada Trimble Business Center ... 64
Gambar 75 : Jendela Plan View ... 64
Gambar 76 : Project Setting ... 65
Gambar 77 : List sistem koordinat ... 65
Gambar 78 : List datum horizontal ... 66
Gambar 79 : Model geoid ... 66
Gambar 80 : Kriteria presisi pengolahan ... 67
Gambar 81 : Import Data untuk diolah ... 67
Gambar 82 : Raw data check in ... 68
Gambar 83 : Jaring baseline GNSS ... 68
Gambar 84 : Titik kontrol pengamatan ... 69
Gambar 85 : Input koordinat horizontal dan vertikal ... 69
Gambar 86 : Setting interval processing ... 70
Gambar 87 : Hasil pengolahan baseline ... 70
Gambar 88 : Pemilihan baseline yang akan di edit ... 71
Gambar 89 : Satellite editor ... 72
Gambar 90 : Editing cycle slip ... 72
Gambar 91 : adjust network ... 73
vii
viii
Daftar Isi
Daftar Tabel
Tabel 1 : Metode Penentuan Posisi ... 11
Tabel 2 : Faktor dilakukannya proses diferensial pada data GNSS (Hasanuddin Z. Abidin 1994) ... 13
Tabel 3 : Fungsi Tombol, Indikator dan
Port
Pada Trimble R4 ... 43
Tabel 4 : Penjelasan Indikator Lampu LED ... 44
Tabel 5 : Interval Perekaman dan Jumlah Memori yang Dibutuhkan ... 45
Tabel 6 : Fungsi dari Menu Trimble Access ... 48
1.
Pengetahuan Dasar GNSS Geodetik
Daftar Isi :
Pendahuluan Tujuan Pelatihan Kerangka Pelatihan Pengertian GNSS Prinsip dasar penentuan posisi dengan GNSS
Klasifikasi receiver GNSS
Sinyal GNSS
Perencanaan persiapan survey GNSS
Pertanyaan Ulasan
Pembahasan Objektif pada Bab ini
M o d u l
1
Modul 1 Pengetahuan Dasar GNSS Geodetik 1
Pendahuluan
Modul ini mencakup informasi mengenai pengetahuan dasar GNSS Geodetik. Konsep yang dibahas mencakup pengertian GNSS, prinsip dasar penentuan posisi dengan GNSS, klasifikasi receiver GNSS, sinyal GNSS serta Perencanaan persiapan survey GNSS.
Tujuan Pelatihan
Mengetahui mengenai prinsip dasar penentuan posisi dengan GNSS
Mengetahui mengenai klasifikasi receiver GNSS
Mengetahui mengenai sinyal GNSS
Mengidentifikasi mengenai perencanaan persiapan survey GNSS
Kerangka Pelatihan
Diskusi :
Pengertian GNSS
Prinsip Dasar Penentuan Posisi dengan GNSS
Klasifikasi Receiver GNSS
Sinyal GNSS
Modul 1 Pengetahuan Dasar GNSS Geodetik 2
Global Positioning System (GPS) merupakan suatu konstelasi yang terdiri tidak kurang dari 24 satelit yang meyediakan informasi koordinat posisi yang akurat secara global. GNSS mempergunakan satelit dan komputer untuk melakukan penghitungan posisi dimanapun di muka bumi ini. Sistem ini dimiliki, dioperasikan dan dikontrol oleh United States Departement of Defenses (DoD). GNSS dapat dipergunakan secaral global dimanapun dan oleh siapapun dimuka bumi ini secara gratis.
Global Navigation Satellite System (GNSS) merupakan istilah singkatan dari suatu sistem satelit navigasi yang menyediakan posisi geospasial dalam lingkup global.
GNSS beroperasi secara penuh sejak Desember 2009. Seiring itu GLONASS punya Russia mempunyai cakupan seluruh dunia dengan 18 satelit yang tersedia sejak Desember 2009, dan satelit GALILEO milik Eropa juga COMPASS milik China sedang dikembangkan.
GLONASS (GLObal'naya NAvigatsionnaya Sputnikovaya Sistema, atau Global Navigation Satellite System) merupakan sistem navigasi ruang angkasa milik Russia yang bisa disamakan dengan sistem GNSS milik Rusia. Satelit berjumlah 21 pada 3 bidang orbit datar.
1.2
Prinsip Dasar Penentuan Posisi dengan GNSS
Konsep dasar penentuan posisi dengan GNSS adalah reseksi jarak, yaitu dengan pengukuran jarak secara simultan ke beberapa satelit GNSS yang koordinatnya telah diketahui. Secara vektor, prinsip dasar penentuan posisi dengan GNSS diperlihatkan pada gambar berikut.
Gambar 1 : Prinsip dasar penentuan posisi dengan GNSS (pendekatan vektor) Pusat bumi R (dicari) (diperlukan) GNSS r (diketahui) R = r -
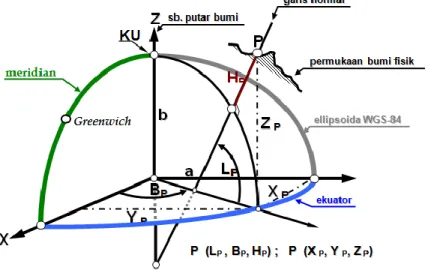
Modul 1 Pengetahuan Dasar GNSS Geodetik 3 Pada pengamatan dengan GNSS, yang dapat diukur adalah jarak antara pengamat dengan satelit (bukan vektornya), agar posisi pengamat dapat ditentukan maka dilakukan pengamatan terhadap beberapa satelit sekaligus secara simultan. Gambar berikut adalah ilustrasi prinsip dasar penentuan posisi dengan GNSS.
Gambar 2 : Prinsip dasar penentuan posisi dengan GNSS
Koordinat titik-titik yang dihasilkan dari suatu survai GNSS adalah posisi titik 3-D yang mengacu pada datum WGS-84 dalam sistem koordinat kartesian (X,Y,Z) dan geodetik (L,B,H).
Modul 1 Pengetahuan Dasar GNSS Geodetik 4
1.3
Klasifikasi Receiver GNSS
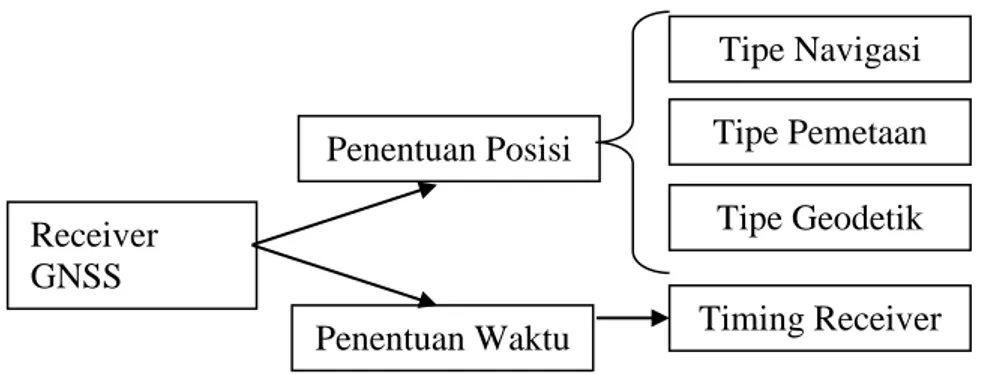
Dilihat dari fungsinya, secara umum receiver GNSS dapat diklasifikasikan secara sistematik pada gambar berikut.
Gambar 4 : Klasifikasi Receiver GNSS
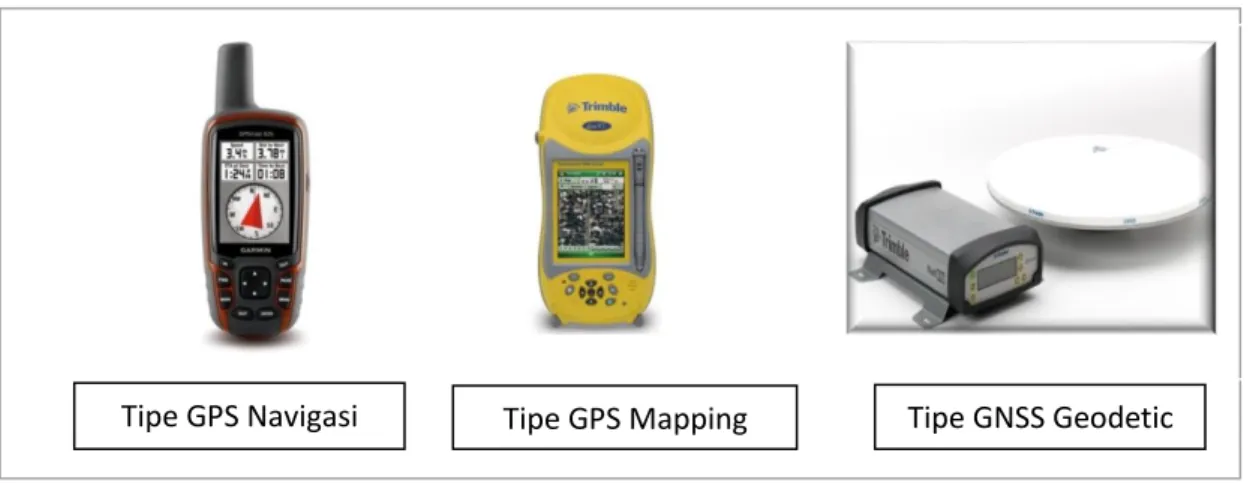
Receiver GNSS untuk penentuan posisi pada dasarnya dapat dibagi atas receiver tipe navigasi, tipe pemetaan (mapping), dan tipe geodetic. Receiver tipe navigasi yang kadang disebut tipe genggam (handheld receiver) umumnya digunakan untuk penentuan posisi absolute secara instan yang tidak menuntut ketelitian tinggi. Receiver navigasi tipe sipil dapat memberikan ketelitian posisi sekitar 5-10 m, dan tipe militer sekitar 3-5 meter. Harga receiver tipe navigasi umumnya relative murah.
Seperti halnya receiver tipe navigasi, receiver GNSS tipe pemetaan (mapping) juga memberikan data pseudorange (kode C/A). hanya bedanya, pada receiver tipe pemetaan, data tersebut direkam dan dapat kemudian dipindahkan ke computer untuk diproses lebih lanjut. Oleh sebab itu, tidak seperti halnya receiver tipe navigasi, receiver tipe pemetaan dapat digunakan untuk penentuan posisi secara diferensial, dan dalam hal ini ketelitian yang dapat diperoleh adalah sekitar 1-2 meter.
Dari ketiga receiver GNSS untuk penetuan posisi, tipe geodetic adalah tipe receiver yang relative paling canggih, paling mahal dan juga memberikan data yang paling presisi. Oleh sebab itu, receiver tipe geodetic umumnya digunakan untuk aplikasi-aplikasi yang menuntut ketelitian yang relative tinggi dari orde cm sampai mm, seperti untuk pengadaan titik – titik control geodesi, pemantauan deformasi, dan studi geodinamika. Berdasarkan pada jumlah data yang diamati, dikenal tipe geodetic satu frekuensi dan dua frekuensi. Tipe geodetic satu frekuensi hanya merekam data pseudorange dan fase dari sinyal L1, sedangkan tipe dua frekuensi juga merekan data dari sinyal L2.
Receiver
GNSS
Penentuan Posisi
Penentuan Waktu
Tipe Navigasi
Tipe Pemetaan
Tipe Geodetik
Timing Receiver
Modul 1 Pengetahuan Dasar GNSS Geodetik 5
Gambar 5 : Macam Tipe GNSS
1.4
Sinyal GNSS
Satelit GNSS memancarkan sinyal-sinyal, pada prinsipnya untuk “memberi tahu” si pengamat sinyal tersebut tentang posisi satelit yang bersangkutan
serta jaraknya dari si pengamat beserta informasi waktunya, seperti yang diilustrasikan pada gambar berikut.
Gambar 6: Informasi yang dikandung sinyal GNSS
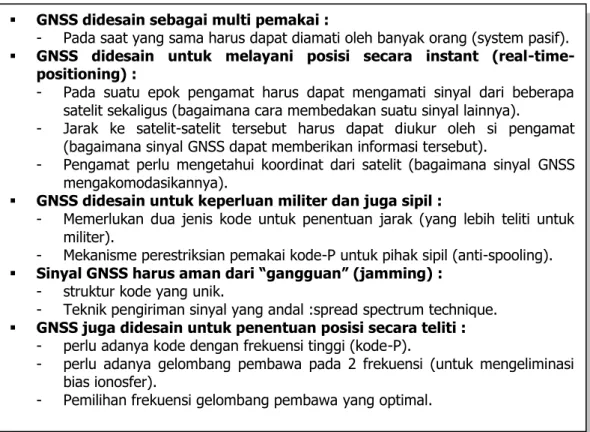
Pada dasarnya sinyal GNSS cukup kompleks. Ini disebabkan sinyal GNSS didesain untuk memenuhi beberapa objektif, untuk keperluan sipil maupun militer seperti yang dijabarkan pada Tabel berikut.
Modul 1 Pengetahuan Dasar GNSS Geodetik 6
Tabel : Faktor-faktor yang membuat sinyal GNSS cukup kompleks
Sinyal GNSS dapat dibagi atas 3 komponen yaitu penginformasi jarak (kode), penginformasi posisi satelit (Navigation message), dan gelombang pembawa (Carrier wave) ( Hasanuddin Z.Abidin, 1994).
1.5
Perencanaan Persiapan Survey GNSS
Pelaksanaan survey GNSS memerlukan perencaan dan persiapan yang matang untuk menghindarkan terjadinya permasalahan yang terjadi di lapangan yang biasanya berhubungan dengan manajemen survey seperti kelengkapan jenis peralatan yang digunakan, kondisi di lapangan baik itu untuk geometri penerimaan satelit maupun jumlah titik, lokasi titik termasuk juga metode pengamatan, pengolahan data dan organisasi pelaksanaan.
GNSS didesain sebagai multi pemakai :
- Pada saat yang sama harus dapat diamati oleh banyak orang (system pasif).
GNSS didesain untuk melayani posisi secara instant
(real-time-positioning) :
- Pada suatu epok pengamat harus dapat mengamati sinyal dari beberapa satelit sekaligus (bagaimana cara membedakan suatu sinyal lainnya).
- Jarak ke satelit-satelit tersebut harus dapat diukur oleh si pengamat (bagaimana sinyal GNSS dapat memberikan informasi tersebut).
- Pengamat perlu mengetahui koordinat dari satelit (bagaimana sinyal GNSS mengakomodasikannya).
GNSS didesain untuk keperluan militer dan juga sipil :
- Memerlukan dua jenis kode untuk penentuan jarak (yang lebih teliti untuk militer).
- Mekanisme perestriksian pemakai kode-P untuk pihak sipil (anti-spooling).
Sinyal GNSS harus aman dari “gangguan” (jamming) :
- struktur kode yang unik.
- Teknik pengiriman sinyal yang andal :spread spectrum technique.
GNSS juga didesain untuk penentuan posisi secara teliti :
- perlu adanya kode dengan frekuensi tinggi (kode-P).
- perlu adanya gelombang pembawa pada 2 frekuensi (untuk mengeliminasi bias ionosfer).
Modul 1 Pengetahuan Dasar GNSS Geodetik 7 Gambar 7 : Parameter Perencanaan Survey GNSS (Hasanuddin Z. Abidin 1994)
2.
Metode Penentuan Posisi Dengan
GNSS Geodetik
Daftar Isi :
Pendahuluan Tujuan Pelatihan Kerangka Pelatihan Metode Penentuan Posisi
Pengolahan Data Pada Pengukuran GNSS Geodetik
Metode Penentuan Posisi Pengukuran GNSS Geodetik
Absolute
Differential
Static
Rapid static
Static PPP Post Process
Kinematik
Stop and go
Real Time PPP (RT-PPP)
Pengolahan Data Pada Pengukuran GNSS Geodetik
Pertanyaan Ulasan
Pembahasan Objektif dari Bab ini
M o d u l
2
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 10
Pendahuluan
Modul ini mencakup informasi mengenai pengetahuan dasar mengenai metode penentuan posisi pengukuran menggunakan GNSS Geodetik dan pengolahan data pada pengukuran GNSS Geodetik.
Tujuan Pelatihan
Tujuan Pelatihan pada bab ini meliputi pemahaman mengenai :
Penjelasan mengenai beberapa metode penentuan posisi pengukuran menggunakan GNSS Geodetik
Pemahaman mengenai masing - masing metode penentuan posisi dan alur kerjanya
Pemahaman mengenai pengolahan data pada pengukuran GNSS Geodetik
Kerangka Pelatihan
Pelatihan ini pada dasarnya meliputi diskusi mengenai :
Metode Penentuan Posisi
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 11
2.1 Metode Penentuan Posisi
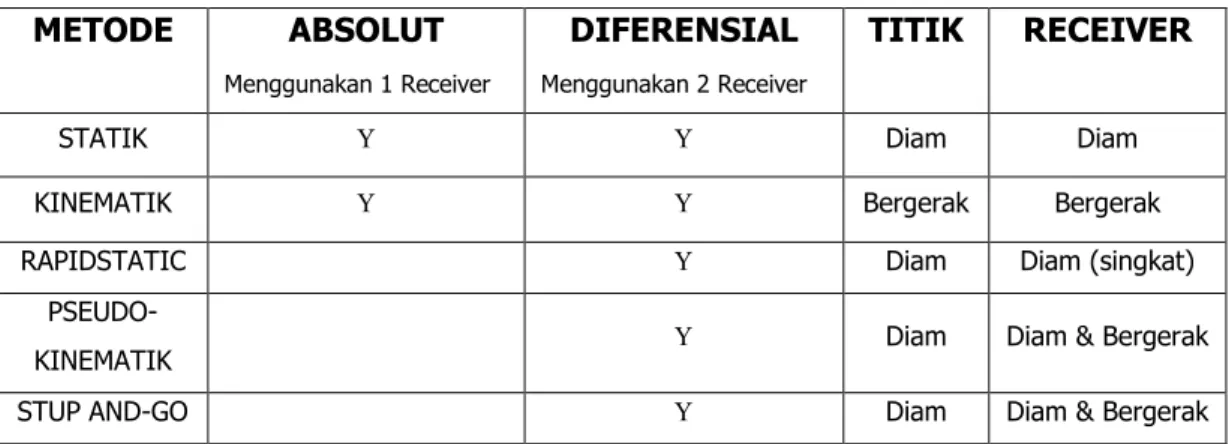
Metode penentuan posisi dengan GNSS dapat dikelompokkan atas beberapa metode yaitu: absolute, differential, static, rapid static, pseudo-kinematic, dan
stop and go. Prinsip dan karakteristik dari setiap metode penentuan posisi tersebut dijelaskan berikut ini :
Tabel 1 : Metode Penentuan Posisi
Berdasarkan aplikasinya, metode-metode penentuan posisi dengan GNSS juga dapat dibagi atas tiga kategori utama, yaitu survey geodetik, survey mapping dan navigasi, dijelaskan sebagai berikut :
Gambar 8 : Metode Penentuan Posisi dengan GNSS
METODE
ABSOLUT
Menggunakan 1 Receiver
DIFERENSIAL
Menggunakan 2 ReceiverTITIK
RECEIVER
STATIK Diam Diam KINEMATIK Bergerak Bergerak RAPIDSTATIC Diam Diam (singkat)
PSEUDO-KINEMATIK Diam Diam & Bergerak STUP AND-GO Diam Diam & Bergerak
Penentuan Posisi Dengan GNSS
Survey Geodetik
Navigasi
Absolute
Diferensial
Absolute
Diferensial
Post-processing
Realtime
Statik
Pseudo-kinematik
Kinematik
Stop and Go
Statik Singkat
Survey Mapping
Absolute
Post-processing
Realtime
Post-processing / Realtime
PPP
Stop and Go
Kinematik
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 12
2.2
Metode Pengamatan Absolute
Metode pengamatan ini dinamakan juga point positioning karena penentuan posisi dapat dilakukan per titik tanpa tergantung pada titik lainnya yang diberikan berdasarkan sistem referensi datum WGS-84 terhadap pusat masa bumi, dengan menggunakan satu alat receiver GNSS. Prinsip dasarnya adalah melakukan pengukuran jarak terhadap beberapa satelit secara simultan, titik yang akan ditentukan posisinya dalam keadaan diam atau bergerak, dan biasanya berdasarkan pengamatan data pseudo range. Pengamatan data phase
bisa juga digunakan jika sebelumnya telah ditentukan initialisasi ambiguitas
phase atau telah diestimasi bersamaan dengan nilai posisinya, pengamatan ini dinamakan Precise Point Positioning (PPP) yang menggunakan data phase
dalam pengamatan statik atau postproses.
Gambar 9 : Metode Pengamatan Absolute Statik dan Kinematik ( Hassanuddin Z. Abidin , 2006)
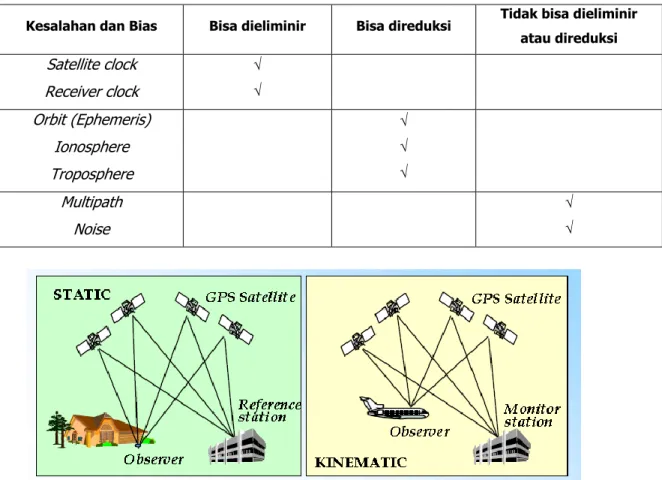
2.3 Metode Pengamatan Diferensial
Metode pengamatan ini juga dinamakan relative positioning, dibutuhkan minimal 2 alat GNSS geodetik, salah satu alat tersebut ditempatkan pada titik yang diketahui koordinatnya (titik referensi), dan alat yang lain ditempatkan pada posisi yang ditentukan merupakan relatif terhadap titik referensi tersebut. Prinsip dasarnya yaitu melakukan proses diferensial untuk melakukan eliminasi dan reduksi terhadap beberapa kesalahan dan bias, sehingga diperoleh posisi yang lebih akurat. Efektifitas dari proses diferensial ini sangat tergantung kepada jarak antara titik referensi dan titik yang akan ditentukan posisinya (panjang baseline), semakin dekat jaraknya maka akan lebih efektif. Titik yang
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 13 Metode pengamatan ini digunakan untuk kegiatan survey dan pemetaan, survey geodetik, dan navigasi presisi.
Tabel 2 : Faktor dilakukannya proses diferensial pada data GNSS (Hasanuddin Z. Abidin 1994)
Kesalahan dan Bias Bisa dieliminir Bisa direduksi Tidak bisa dieliminir
atau direduksi Satellite clock Receiver clock √ √ Orbit (Ephemeris) Ionosphere Troposphere √ √ √ Multipath Noise √ √
Gambar 10: Metode pengamatan diferensial (Hasanuddin Z. Abidin 1994)
2.4
Metode Pengukuran Statik
Pada metode pengukuran ini titik yang akan ditentukan posisinya tidak bergerak, pengamatan yang dilakukan bisa secara absolute maupun diferensial, data pengamatan bisa menggunakan pseudorange dan/atau phase yang selanjutnya dilakukan pengolahan data setelah pengamatan (post process),
keandalan dan ketelitian yang diperoleh cukup tinggi yaitu di orde milimeter sampai centimeter, dan biasanya digunakan untuk penentuan titik-titik kontrol survey pemetaan maupun survey geodetik.
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 14 Gambar 11 : Metode Pengukuran Statik (Hasanuddin Z. Abidin 1994)
2.5
Metode Pengukuran Statik Singkat ( Rapid Static )
Metode pengukuran statik singkat ini dilakukan dengan sesi pengamatan yang lebih singkat (5-20 menit), prosedur pengumpulan data di lapangan sama dengan pengukuran statik, lama pengamatan tergantung pada panjang baseline, jumlah satelit, serta geometri satelit pengamatan ini berbasiskan metode pengamatan diferensial dengan menggunakan data phase. Persyaratan mendasar adalah penentuan ambiguitas phase secara cepat sehingga menuntut penggunaan piranti lunak pemroses data GNSS yang andal dan canggih. Pada saat melakukan pengukuran di lapangan memerlukan kondisi satelit geometri yang baik, tingkat bias dan kesalahan data yang relatif rendah, serta lingkungan yang relatif tidak menimbulkan multipath, selain itu alat GNSS yang digunakan diharapkan mempunyai data dual frekuensi. Ketelitian relatif posisi titik yang diperoleh adalah dalam orde centimeter, pengukuran statik singkat ini diantaranya digunakan untuk survey pemetaan dengan orde tidak terlalu tinggi, perapatan titik dan survey rekayasa.
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 15
2.6
Metode Pengukuran Statik PPP (Precise Point
Positioning) Post Process
Metode pengukuran ini dilakukan dengan menggunakan satu receiver, lebih diharapkan dengan 2 frekuensi, dan pengambilan data phase minimal 1 jam, kemudian data setelah pengamatan diproses secara online, melalui website diantaranya AUSPOS, CSRS Canadian dan Trimble RTX.
Gambar 13 : Metode Pengukuran Statik PPP (Precise Point Positioning) Online Post Process
2.7
Metode Pengukuran Kinematik
Pada metode pengukuran kinematik ini titik-titik yang akan ditentukan posisinya bergerak (kinematik), selain untuk posisi, GNSS juga bisa digunakan untuk menentukan kecepatan, percepatan dan altitude. Pengamatan ini bisa dilakukan secara absolute maupun diferensial dengan menggunakan data
pseudorange dan/atau phase. Hasil penentuan posisi nya bisa diperlukan saat pengamatan (real-time) ataupun sesudah pengamatan (post-processing), untuk pengamatan diferensial secara realtime diperlukan komunikasi data antara stasiun referensi dengan receiver yang bergerak. Penentuan posisi kinematik secara teliti memerlukan penggunaan data phase dengan penentuan ambiguitas phase secara on-the-fly. Penggunaan metode kinematik biasanya dilakukan untuk navigasi, pemantauan (surveilance), guidance, fotogrametri,
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 16 Gambar 14 : Metode Pengukuran Kinematik secara post-proses maupun real-time
2.8
Metode Pengukuran Stop-and-Go
Pada metode pengukuran ini dilakukan pergerakan alat GNSS sebagai rover dan stop selama beberapa puluh detik dari titik ke titik, dinamakan juga survey semi kinematik, mirip dengan pengukuran kinematik, hanya titik yang akan ditentukan posisinya tidak bergerak dan alat GNSS diam beberapa saat di titik tersebut. Perlu diperhatikan ambiguitas phase pada titik awal harus ditentukan sebelum alat GNSS rover bergerak, untuk mendapatkan tingkat ketelitian berorde centimeter.
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 17 Gambar 15 : Contoh metode pengukuran stop-and-go
2.9
Metode Pengukuran Real Time Precise Point
Positioning (RT-PPP)
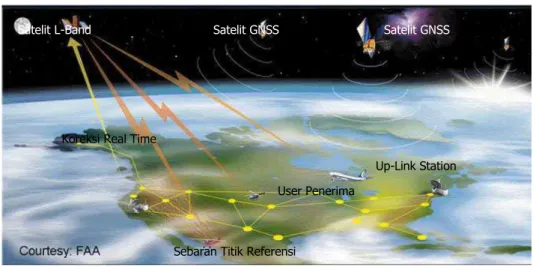
Pada metode pengukuran ini menggunakan teknologi terbaru dengan menggunakan satu alat receiver yang mempunyai kemampuan menerima data koreksi secara realtime dari satelit komunikasi L-Band, pengamatan secara statik dilakukan dengan initialisasi awal sekitar 30 menit di tempat yang relatif terbuka, dan selanjutnya ketelitian akan berada pada titik temu (konvergensi) atau tetap sekitar dibawah 10 centimeter, kemudian selanjutnya bisa dilakukan metode pengukuran kinematik
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 18 Gambar 16 : Metode pengukuran Statik dan Kinematik PPP (Precise Point Positioning) Real-Time
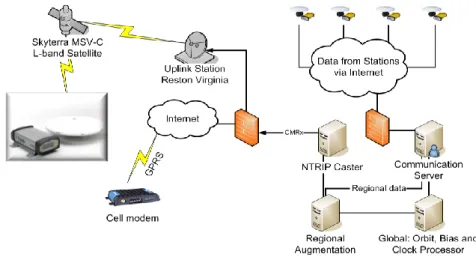
Teknologi terbaru untuk metode pengamatan data phase Precise Point Positioning secara realtime bisa dilakukan, yaitu dengan menggunakan informasi satelit yang presisi dari orbit satelit, jam satelit, bias satelit dan informasi tambahan lainnya yang diperoleh dari stasiun referensi secara global dan dikirim ke server pusat untuk dilakukan pengolahan data yang kemudian dikirimkan kembali melalui satelit komunikasi L-Band dalam format koreksi realtime cmrxe kepada pengguna.
Gambar 17 : Informasi dari satelit yang diperoleh stasiun referensi secara global (Trimble, 2012)
Satelit L-Band Satelit GNSS Satelit GNSS
User Penerima
Up-Link Station
Sebaran Titik Referensi Koreksi Real Time
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 19 Gambar 18 : Diagram alur proses Precise Point Positioning Real - Time (Trimble, 2012)
2.10 Pengolahan Data Pada Pengukuran GNSS Geodetik
Pengolahan data survey GNSS diperlukan pengetahuan dan pemahaman dasar-dasar teori pemetaan khususnya bidang geodesi diantaranya mengenai hitung perataan dan statistik, sistem dan kerangka referensi geodetik, geodesi satelit, transformasi koordinat dan sistem proyeksi peta.Pemrosesan data survey GNSS biasanya mencakup tiga tahapan utama yaitu : 1. Pengolahan Data Baseline
2. Perataan Jaringan
3. Transformasi datum dan koordinat
Pemrosesan data dapat dilakukan dengan menggunakan perangkat lunak komersial ataupun ilmiah, tergantung tingkat ketelitian koordinat yang diinginkan.
Modul 2 Metode Penentuan Posisi dengan GNSS Geodetik 20 Untuk pemrosesan dengan metode pengukuran PPP bisa dilakukan online dengan cara mengirimkan data mentah GNSS dalam format RINEX, pada website tertentu biasanya kita harus menyediakan pendaftaran alamat email pada website tersebut.
Alamat website untuk post-process online yaitu :
1. AUSPOS : http://www.ga.gov.au/geodesy/sgc/wwwGNSS/ 2. CSRS-PPP : http://www.geod.nrcan.gc.ca/ppp_e.php 3. OPUS : http://www.ngs.noaa.gov/OPUS/
3.
Komponen Sistem Hardware dan
Software GNSS Geodetik
Daftar Isi :
Pendahuluan Tujuan Pelatihan Kerangka Pelatihan Sistem Hardware : GNSS Geodetik Trimble NetR9 dan External Radio
GNSS Geodetik Trimble R4 dan Trimble Slate Controller
Sistem Software : Software Lapangan dan Software Pengolahan
Komponen Peralatan Dalam Survey GNSS Geodetik
Hardware - Receiver Trimble NetR9
Hardware - Data Collector Trimble Slate Controller
Software - Pengambil Data Trimble Access
Software - Pengolahan Data Trimble Bussiness Center
Pertanyaan Ulasan
Pembahasan Objektif dari Bab ini
M o d u l
3
Modul 3 Komponen Sistem Hardware dan Software GNSS Geodetik 20
Pendahuluan
Modul ini mencakup informasi mengenai pengenalan awal dari beberapa komponen yang digunakan untuk melakukan pengukuran GNSS Geodetik, diantaranya Trimble NetR9, External Radio ADL Vantage Pro, Trimble R4, Trimble Slate Controller dan Trimble Business Center Software.
Tujuan Pelatihan
Tujuan Pelatihan pada bab ini meliputi pemahaman mengenai :
Penjelasan mengenai komponen yang digunakan pada pengukuran GNSS Geodetik
Pemahaman mengenai masing - masing komponen
Kerangka Pelatihan
Pelatihan ini pada dasarnya meliputi diskusi mengenai :
Sistem Hardware : GNSS Geodetik Trimble NetR9 dan Data Colletctor
GNSS geodetik Trimble R4 dan Trimble Slate Controller
Sistem Software : Software Lapangan dan Software Pengolahan
3.1
Komponen Peralatan Dalam Survey GNSS Geodetik
Komponen peralatan dalam survey GNSS mencakup : Hardware Receiver : Trimble NetR9 dan Trimble R4 Hardware Data collector : Trimble Slate Controller Software Pengambil Data : Trimble Access
Software Pengolah Data :Trimble Business Center Software
3.1.1
Hardware Receiver Trimble NetR9
Trimble NetR9 GNSS adalah receiver Sistem Satelit Navigasi Global (GNSS) yang menggunakan dua chipset yang memiliki 440 kanal untuk menerima seluruh sinyal satelit navigasi yang ada. Receiver ini mampu untuk melakukan pengukuran dengan metode Absolute, Statik mapupun Kinematik. Sinyal-sinyal satelit navigasi yang dapat dijejak oleh Receiver Trimble NetR9 GNSS, antara lain
Modul 3 Komponen Sistem Hardware dan Software GNSS Geodetik 21 c. GALILEO : L1 CBOC, E5A, E5B, dan E5AltBOC
d. COMPASS : B1, B2, dan B3
e. QZSS : L1 C/A, L1C, L1 SAIF, L2C, L5, dan LEX
f. SBAS : L1 C/A (EGNOS/MSAS), L1 C/A dan L5 (WAAS) g. L-Band : OmniSTAR VBS, HP, dan XP.
Gambar 20 : GNSS Geodetik Trimble NetR9
Trimble NetR9 GNSS dapat dilengkapi dengan teknologi Real Time Extended (RTX) yang merupakan metode penentuan posisi secara absolut menggunakan teknik pengoreksian Precise Point Positioning (PPP) secara real time. Teknik pengoreksian PPP yaitu cara pengoreksian sinyal satelit navigasi yang masih mengandung kesalahan orbit dan jam satelit, serta bias menggunakan pemodelan dan algoritma tertentu. Salah satu media komunikasi yang digunakan oleh Trimble untuk mengirim data koreksi secara real time melalui sinyal satelit L-Band. Pengguna teknologi Trimble RTX tidak dikenakan biaya pemanfaatan data koreksi real time ini selama firmware yang terinstal masih aktif (perkiraan aktivasi saat ini sampai tahun 2100). Teknologi Trimble RTX dapat memberikan ketelitian penentuan posisi horizontal sebesar 3,8 cm. Beberapa fitur penting teknologi Trimble RTX sebagai berikut :
a. Data koreksi RTX dapat diterima di seluruh dunia, termasuk Indonesia, melalui media komunikasi sinyal satelit L-Band dan Internet Protocol (IP)/Selular.
b. Ketelitian posisi horizontal yang diukur menggunakan teknologi RTX secara real time sebesar 3,8 cm.
c. Sinyal satelit navigasi yang dikoreksi terdiri dari satelit GNSS dan GLONASS. d. Pemanfaatan teknologi Trimble RTX tidak dikenakan biaya dengan perkiraan
waktu sampai tahun 2100.
e. Pengguna tidak perlu mengeluarkan biaya untuk memasang stasiun referensi (base station) sendiri.
Modul 3 Komponen Sistem Hardware dan Software GNSS Geodetik 22 f. Teknologi Trimble RTX menggunakan sistem koordinat dan datum global
yang dapat ditransformasi ke sistem koordinat dan datum lokal.
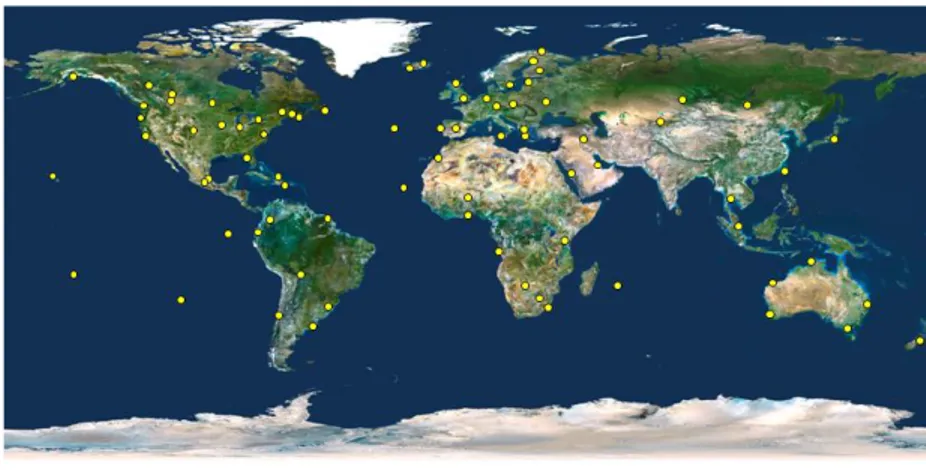
g. Trimble telah memasang 100 stasiun pemantauan yang tersebar di seluruh dunia.
Gambar 21 : Jaringan Permanen Base Station Global Milik Trimble Receiver Trimble NetR9 GNSS memiliki fungsi sebagai berikut :
a. Receiver ini dapat digunakan sebagai stasiun referensi yang dapat beroperasi selama 24 jam selama tujuh hari dalam seminggu (24/7) secara terus menerus.
b. Receiver dapat difungsikan sebagai mobile base station untuk postproses maupun realtime dengan menggunakan Eksternal radio, maupun dengan modem portable untuk aplikasi NTRIP
c. Receiver dapat difungsikan untuk berbagai metode pengukuran yaitu pengukuran absolute, pengukuran statik, dan pengukuran kinematik.
Modul 3 Komponen Sistem Hardware dan Software GNSS Geodetik 23
3.1.2
Hardware Receiver Trimble R4
Receiver Trimble R4 memiliki fitur sebagai berikut :
Memiliki teknologi yang dinamakan Trimble R-track technology, yang mengkombinasikan Trimble Maxwell 6 Custom Survey GNSS chip dengan 220 channels dan memungkinkan receiver untuk melacak sinyal satelit sebagai berikut :
– GNSS: L1 C/A, L1C, L2C, L2E
– GLONASS: L1 C/A, L1P, L2 C/A, L2P, L3 (optional)
– Galileo: E1, E5A, E5B (optional)
– BeiDou (COMPASS): B1, B2 (optional)
– SBAS: QZSS, WAAS, EGNOS, GAGAN
Gambar 22 : GNSS Receiver Trimble R4
Centimeter-accuracy, untuk kegiatan pengukuran dengan metode real-time positioning dengan RTK/OTF data, dimana rate bisa di up hingga 10 Hz.
Submeter-accuracy, untuk kegiatan pengukuran dengan metode real-time positioning menggunakan koreksi pseudorange
Automatic OTF (on-the-fly) initialization pada saat bergerak.
Single Lithium-ion rechargeable battery
Menggunakan Bluetooth untuk komunikasi dengan Trimble Controller (Trimble Slate Controller).
Memiliki dua tipe RS-232 serial ports, yang berfungsi untuk :
– Trimble Format (CMR, CMR+ and CMRx) input and output
Modul 3 Komponen Sistem Hardware dan Software GNSS Geodetik 24
– 23 NMEA outputs
– GSOF, RT17, and RT27 outputs
– Supports BINEX and smoothed carrier
Memiliki satu buah port TNC untuk konektor antenna radio.
Memiliki Internal memory untuk penyimpanan data.
Memiliki Internal 450 MHz radio dengan pilihan transmisi GSM/GPRS.
3.1.3
Hardware Data Collector Trimble Slate Controller
Trimble Recon digunakan sebagai hardware yang berfungsi untuk memfasilitasi Trimble NetR9 untuk melakukan pengumpulan data posisi, atau sering disebut dengan field handheld computer.
Gambar 23 : Data Collector - Trimble Slate Controller
Dengan menggunakan Trimble Slate Controller, pengguna dapat melakukan beberapa fungsi diantaranya :
Perangkat untuk memfasilitasi software lapangan (Trimble Access)
Perangkat antarmuka untuk menampilkan nilai koordinat/posisi horisontal dan vertikal, akurasi dari nilai horisontal dan vertikal, skyplot dari satellite, jumlah satellite yang dilacak oleh receiver.
Perangkat untuk melakukan pengumpulan data posisi yang terhubung ke receiver GNSS menggunakan bluetooth.
Perangkat untuk melakukan perhitungan dimensi dari data posisi yang dikumpulkan, seperti menghitung jarak dan luas area.
Modul 3 Komponen Sistem Hardware dan Software GNSS Geodetik 25
3.1.4
Software Pengambil Data - Trimble Access
Trimble Access merupakan software lapangan yang berfungsi untuk pengambilan data dilapangan yang terinstall di data collector. Dengan menggunakan software ini menjadikan pengukuran survey GNSS dapat difasilitasi dengan baik, karena kemampuannya untuk mendukung beberapa kinerja pengukuran GNSS Geodetik seperti : Pengukuran Statik, Pengukuran Kinematik dan Pengukuran Real Time Kinematik.
Selain itu, pada software ini dilengkapi juga tools untuk perhitungan koordinat geometri yang dinamakan dengan fungsi COGO.
Gambar 24 : Tampilan Menu Utama Software Trimble Access
3.1.5
Software Pengolah Data
–
Trimble Business Center
Trimble Business Center dipergunakan untuk pengolahan data pengukuran dan pengamatan yang menggunakan metode statik, rapid statik, atau kinematik yang memerlukan tahapan pekerjaan post-processing. Trimble Business Center
sangat ideal untuk pengolahan data pengamatan GNSS. Beberapa fitur yang penting yang terdapat pada Trimble Business Center, antara lain :
a. Tampilan perangkat lunak yang lengkap dan mudah dipelajari.
b. Kemampuan Trimble Business Center mengolah data hasil pengukuran menggunakan metode RTK dan Statik/PPK untuk menghasilkan laporan dengan spektrum ketelitian yang sesuai dengan kebutuhan pengguna. c. Kemampuan mengidentifikasi dan kemudahan untuk pengguna
Modul 3 Komponen Sistem Hardware dan Software GNSS Geodetik 26 Gambar 25 : Tampilan Pada Software Trimble Business Center
4.
Konfigurasi Peralatan Survey GNSS
Geodetik
Daftar Isi :
Pendahuluan Tujuan Pelatihan Kerangka Pelatihan Konfigurasi Trimble NetR9
Konfigurasi Trimble R4
Konfigurasi Trimble NetR9
Konfigurasi Trimble NetR9 Melalui Display Receiver
Konfigurasi Trimble NetR9 Melalui Web Interface
Konfigurasi Trimble R4
GNSS Configurator
Winflash Utility
Konfigurasi Software Pengambil Data Trimble Access
Pertanyaan Ulasan
Pembahasan Objektif dari Bab ini
M o d u l
4
Modul 4 Konfigurasi Peralatan Survey GNSS Geodetik 27
Pendahuluan
Modul ini mencakup informasi mengenai konfigurasi dari peralatan survey GNSS Geodetik yang akan digunakan.
Tujuan Pelatihan
Tujuan Pelatihan pada bab ini meliputi pemahaman mengenai :
Penjelasan mengenai konfigurasi Trimble NetR9
Penjelasan mengenai konfigurasi Trimble R4
Penjelasan mengenai konfigurasi Trimble Access
Kerangka Pelatihan
Pelatihan ini pada dasarnya meliputi mengenai :
Konfigurasi Trimble NetR9
Konfigurasi Trimble NetR9 Melalui Display Receiver
Konfigurasi Trimble NetR9 Melalui Web Interface
Konfigurasi Trimble R4
Setting Menggunakan GNSS Configurator
Setting Menggunakan Winflash Utility
Modul 4 Konfigurasi Peralatan Survey GNSS Geodetik 28
4.1
Konfigurasi Trimble NetR9 Melalui Display Receiver
Gambar 26 : Display Receiver Trimble NetR9
a)
Pengaturan Receiver Sebagai Base Station
1. Dari Home Screen, tekan untuk menuju tampilan selanjutnya Tampilan Operation Mode akan muncul, gunakan untuk mengkonfigurasi set up reference station, konfigurasi Ethernet, setup system, atau menampilkan status Satelit (SV)
2. Setup reference station sebagai default, kemudian tekan
untuk ke
tampilan selanjutnya. Tampilan base station akan muncul. Gunakan tampilan ini untuk mengatur koordinat reference station, apakah memakai posisi
“here” saat itu atau sudah diikat. 3. Lakukan langkah berikut :
Tekan tombol untuk mengedit posisi saat ini
Tekan untuk mengubah ke New Base (Here). Tekan untuk menyetujui perubahan.
Lanjutkan ke langkah selanjutnya dan secara manual masukkan koordinat. Tekan lagi.
4. Tekan untuk melanjutkan ke tampilan selanjutnya
b)
Mengubah Nama dan deskripsi Base Station
Tekan untuk mengedit nama base station yang akan d i jadikan reference station, nama bisa mencapai 16 karakter.
Tekan atau untuk memilih karakter yang akan diedit dan tekan atau untuk mengubahnya.
Saat selesai/finish, tekan untuk menyetujui perubahan.
Modul 4 Konfigurasi Peralatan Survey GNSS Geodetik 29
c)
Pada Tampilan Kode Base Station :
Tekan untuk mengedit kode dari base station
Tekan tanda atau untuk memilih karakter yang akan diedit kemudian tekan tanda
atau untuk mengubahnya
Saat selesai, tekan
Tekan untuk pindah ke tampilan selanjutnya.
d)
Input Koordinat Titik Referensi
Pengaturan tampilan base untuk lintang :
Tekan untuk mengedit referensi lintang dari stasiun base
Tekan tombol atau untuk memilih karakter yang diedit kemudian tekan tanda atau untuk mengubahnya
Setelah selesai, tekan
Tekan untuk pindah ke tampilan selanjutnya Pengaturan tampilan base untuk bujur :
Tekan untuk mengedit referensi bujur dari stasiun base
Tekan tombol atau untuk memilih karakter yang diedit kemudian tekan tanda atau untuk mengubahnya
Setelah selesai, tekan
Tekan untuk pindah ke tampilan selanjutnya
e)
Pengaturan Nilai Tinggi
Tekan untuk mengedit referensi titik tinggi dari stasiun base
Tekan tombol atau untuk memilih karakter yang diedit kemudian tekan tanda atau untuk mengubahnya
Setelah selesai, tekan
Tekan untuk pindah ke tampilan selanjutnya
f)
Penentuan Tinggi Antenna
Tampilan Jenis Antenna
Tekan untuk mengubah jenis antenna yang digunakan receiver
Tekan atau untuk memilih jenis antenna
Modul 4 Konfigurasi Peralatan Survey GNSS Geodetik 30 Tampilan Menu Pengukuran pada layar
Tekan untuk mengubah bagaimana metode antenna yang digunakan oleh receiver
Tekan atau untuk memilih jenis antenna
Setelah selesai, tekan
Tekan untuk pindah ke tampilan selanjutnya Tampilan tinggi antenna pada layar
Tekan untuk mengubah tinggin antenna yang digunakan receiver
Tekan atau untuk memilih jenis antenna
Setelah selesai, tekan
Tekan untuk pindah ke tampilan selanjutnya
g)
Format Output Koreksi
1. Tekan untuk mengedit nama port yang akan menjadi koreksi ouput 2. Tekan atau untuk memilih port 1, 2, atau 3
3. Saat finish, tekan
4. Tekan untuk memilih format field dan tekan untuk mengedit field 5. Tekan sampai pilihan format terseleksi
6. Tekan untuk pindah ke layar selanjutnya
h)
Data Logging / Perekaman Data
Setelah melakukan koreksi output, tekan untuk men-setting internal logging pada receiver
Tekan atau untuk memilih logging rate 3. Tekan untuk menyetujuinya
4. Tekan untuk memilih files dan dan tekan untuk mengeditnya 5. Tekan atau untuk memilih lama waktu pengolahan data
6. Saat sudah selesai, tekan
Modul 4 Konfigurasi Peralatan Survey GNSS Geodetik 31
i)
Mengaktifkan Logging Session
Tekan u ntuk mengubah session menjadi aktif
Tekan atau untuk memilih nama session
Saat nama session tersedia, tekan untuk mengedit
Catatan : Jika anda belum mengedit session tambahan dengan web interface (tampilan web), anda hanya akan dapat memilih default session. Sebagai tambahan, USB Eksternal Logging hanya dapat dikonfigurasi via web interface 4. Tekan untuk pindah ke field on/off
5. Tekan untuk mengedit settingnya
6. Tekan untuk mengubah setting yang disediakan 7. Saat finish/selesai, tekan
j)
Konfigurasi Setting Ethernet
Port Ethernet Receiver berhubungan dengan jaringan Network sehingga bisa mengakses, mengkonfigurasi, dan memonitor receiver. Koneksi serial kabel ke receiver tidak dibutuhkan.
Receiver memiliki beberapa setting Ethernet : 1. IP Setup : Static or DCHP 2. IP Address 3. NetMask 4. Broadcast 5. Gateway 6. DNS Address 7. HTTP PORT
Setting default untuk port HTTP adalah memilih port 80. Port ini belum dikenali Network/jaringan. HTTP Port 80 adalah port standar untuk web server yang dapat menghubungkan anda dengan receiver dengan memasukkan IP Address di web browser
Sebagai contoh, penggunaan port 80 adalah http://169.254.1.0
Jika receiver di-set menggunakan port yang lebih dari 80, maka harus memasukkan IP Address diikuti nomor port di web browser
Sebagai contoh, port 4000, http://169.254.1.0: 4000
Setting default receiver menggunakan DHCP, DHCP ini akan menghubungkan secara otomatis IP Address, Netmask, Broadcast, Gateway, dan alamat DNS dari jaringan
Saat sebuah receiver dihubungkan ke jaringan menggunakan DHCP, jaringan mengenali IP Address Receiver. Untuk verifikasi alamat, buka Home Screen dan tekan
Gambar 27 : Informasi IP Address pada display NetR9
Jika Jaringan Instalasi men-setting receiver yang terkonfigurasi dengan alamat IP Statik, Anda dapat mengkonfigurasi setting Ethernet lewat front panel,lewat web server, atau menggunakan WinFlash Utility. Untuk menggunakan web server, receiver harus dihubungkan ke jaringan dan memiliki konfigurasi Ethernet yang valid.
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 42
4.2
Konfigurasi Trimble Net R9 Melalui Web Interface
Hubungkan Receiver menggunakan connector ethernet menggunakan kabel network ke port RJ45. Lalu sambungkan ke PC/Laptop.
1. Masukkan Alamat IP Receiver ke alamat bar browser
Gambar 28 : Bar Web Browser
2. Jika security sudah diaktifkan (enabled) di receiver (Pada defaultnya biasanya belum diaktifkan (Disabled)) Kotak dialog web browser akan meminta anda memasukkan username dan password
Gambar 29 : Kotak Dialog Input Username dan Password
Default nilai Login untuk Receiver adalah - User Name : Admin - Password : password
3. Jika anda belum dapat berhubungan dengan receiver, Password untuk Akun Root mungkin sudah diubah, atau akun berbeda digunakan pengguna yang sama. Hubungi administrator receiver jika itu terjadi saat pertama kali log in.
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 43 Gambar 30 : Tampilan awal web browser Trimble Net R9
4.3
Konfigurasi Trimble R4
Kontrol panel bagian depan ada satu tombol berguna untuk menghidupkan dan mematikan reciver atau mereset. Kemudian lampu LED menunjukkan informasi indikator status baterai, radio, perekaman data dan SV pelacakan satelit
Gambar 31 : Tampilan control panel Trimble R4
Tabel 3 : Fungsi Tombol, Indikator dan Port Pada Trimble R4
Tombol Nama Fungsi
Power On / Off Untuk menghidupkan dan mematikan receiver. Berikut dijelaskan beberapa fungsi yang lain :
Tekan sekali : Menghidupkan receiver
Tahan 2 detik : Mematikan receiver
Tahan 15 detik : Menghapus file
emphemeris
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 44 default
Tahan 30 detik : Menghapus seluruh data
file Power LED/ Data
Status Menginformasikan status dari pengamatan data satellite dan status dari baterai receiver. Radio LED Menginformasikan status penerimaan data
koreksi dari gelombang radio.
SV Tracking LED Menginformasikan status receiver telah melacak satelit
Port 1 Koneksi menggunakan Pin Lemo untuk
Device, computer, external radio, power in. Port 2 Koneksi menggunakan serial untuk Device,
computer, external radio
Radio Antenna
Connection Radio komunikasi antenna
Tabel 4 : Penjelasan Indikator Lampu LED
Receiver Mode LED Power
Hijau
LED Radio Hijau
LED Satellite Kuning Redup
Receiver Mati Mati Mati Mati
Receiver beroperasi dengan baterai penuh
Menyala - -
Baterai Lemah Berkedip Cepat
- -
Melacak < 4 Satelit Menyala - Berkedip Cepat Melacak > 4 Satelit Menyala - Berkedip Lambat Merekam data pada
internal memori receiver
Berkedip setiap 3 detik
- -
Menerima sinyal radio Menyala Berkedip Lambat - Tidak menerima sinyal
radio
Menyala Mati -
Receiver beroperasi secara real time
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 45
4.4
Konfigurasi Receiver menggunakan GPS Configurator
Software
1. Hubungkan kabel pada Port 1 atau Port 2 di bagian bawah receiver dan pada serial komputer kemudian nyalakan.
2. Buka software GPS Configurator yang telah terinstal di komputer
Gambar 32: GNSS Configurator pada Daftar Program
3. Pada tampilan Device Type, Pilih Trimble R8/R6/R4, software akan secara otomatis terkoneksi dengan receiver
Gambar 33 : Pilihan Merk Alat yang akan dikoneksikan dengan GNSS Configurator
4. Buat pilihan yang sesuai dengan kebutuhan untuk pengaturan receiver Interval Perekaman Data Kebutuhan Memori
10 Hz 2588 KB
1 Hz 335 KB
5 Detik 87 KB
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 46 5. Klik Apply, pengaturan yang dilakukan di GPS Configurator sudah diterapkan pada receiver
4.5
Winflash Utility Software
Software ini bisa terkoneksi dengan produk Trimble dengan beberapa kegunaan yang meliputi :
- Instalasi software, firmware, dan option upgrade
- Melakukan pengecekkan alat seperti menampilkan informasi konfigurasi - Melakukan konfigurasi radio internal pada receiver
4.6
Upgrade Firmware
Receiver ini telah dilengkapi dengan firmware versi terbaru, jika ada firmware yang lebih baru tersedia, maka firmware pada receiver dapat diupgrade.
Winflash utility software ini melengkapi proses upgrade firmware, seperti uraian berikut ini :
1. Buka program Winflash utility, tampil Device Configuration
Gambar 34 : Pilihan Jenis Alat Trimble 2. Pada daftar Device Type, pilih Trimble R8/R6/R4
3. Pada baris PC Serial Port, pilih serial COM pada komputer yang terhubung dengan receiver
4. Klik Next
Maka tampil Operation Selection, yang menunjukkan daftar seluruh pengaturan dari alat yang terpilih, selain itu juga tampil baris Description.
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 47
Gambar 35 : Membuka GNSS Software yang terinstall 5. Pilih GPS software dan klik Next
Maka akan tampil pilihan GPS Software, pilih software upgrade yang akan diinstall di receiver
Gambar 36 : Melihat Firmware yangsudah terinstal pada Receiver R4
6. Pilih upgrade firmware terbaru pada kolom Available Software kemudian klik Next
Tampil setting review, menunjukkan untuk koneksi dengan receiver, dan Metode koneksi yang dianjurkan, juga daftar konfigurasinya.
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 48
Gambar 37 : Menampilkan semua settingan dari firmware Trimble R4 7. Jika semua telah sesuai, Klik Finish
Berdasarkan pada pilihannya, tampilan Software Upgrade menunjukkan status dari proses pengaturan ( contoh, menampilkan proses koneksi dengan receiver Rx GNSS. Please wait....)
8. Klik OK
Tampilan Software Upgrade muncul kembali dan memberikan status telah selesai completed Successfully
9. Klik Menu untuk memilih proses pengaturan yang lain, atau Klik exit untuk keluar
10. Jika dipilih exit tampilan akan muncul untuk mengkonfirmasi. Klik OK
4.7
Konfigurasi Software Pengambil Data Lapangan
Trimble Access
Trimble Access Software merupakan perangkat lunak untuk pengambilan data di lapangan, program ini terinstal di controller, untuk instalasinya melalui komputer atau dari server Trimble.
Tabel berikut memberikan gambaran kegunaan atau fungsi dari setiap sistem komponen dan tempat diinstalkannya.
Tabel 6 : Fungsi dari Menu Trimble Access
Aplikasi Fungsi Diinstalkan
pada...
Standard /
Optional Trimble Access Instalasi dan Komputer Standard
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 49 perubahan aplikasi terbaru melalui koneksi Microsoft ActiveSync dan Windows Mobile Device Center pada komputer Menu Trimble Access - Memulai aplikasi dan pengaturan pada controller - Pergantian aplikasi yang sedang dijalankan dengan program pada controller - Membuat sistem pemberitahuan - Digunakan untuk login pada Trimble Connected Community untuk mengakses layanan internet termasuk AccessSync Controller Standard
General Survey Merupakan menu pengukuran secara keseluruhan baik untuk peralatan GNSS maupun optis Controller Standard Setting Menentukan pengaturan untuk keseluruhan sistem pada satu tempat. Meliputi Unit, Connection setting ( pengaturan
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 50 surveystyle dan
radio ) juga pengaturan lainnya
Pada gambar dan tabel berikut menunjukkan tampilan menu utama dan fungsi dari ikon yang terdapat pada menu Trimble Access
Gambar 38: Tampilan Menu Utama Trimble Access
Tabel 7 : Fungsi dari setiap bagian Menu dan Ikon
Nomor Tampilan Menu Fungsi dan Kegunaan
1 Trimble Access Task Bar
Tampil pada layar setiap menggunakan Trimble Access dalam pertukaran aplikasi dan layanan untuk memberikan informasi sistem
2 Jendela Login Menunjukkan siapa yang terdaftar pada sistem; Jika tidak ada yang terdaftar tampil
Tap Here to Login. Bagian ini juga menentukan nama folder dimana semua data tersimpan pada controller.
Pilih jendela login ini untuk mendaftarkan dan merubah user yang menggunakan 3 Menu Aplikasi Pilih jendela aplikasi untuk memulainya atau
memindahkan terhadap aplikasi lainnya 10 9 7 8 1 8 6 5 1 4 3 2 1
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 51 Access untuk :
- Menampilkan informasi mengenai aplikasi Trimble Access termasuk informasi versi dan lisensi
- Mengatur dan menukar antara Menu Aplikasi, untuk kembali ke Menu Utama
6 Judul Menampilkan informasi yang sedang
digunakan atau layanan yang sedang aktif
7 Ikon Koneksi
Internet
Menunjukkan adanya koneksi internet Adanya koneksi internet
Tidak ada koneksi internet
8 Ikon Pemberitahuan Tombol Pemberitahuan sangat berguna untuk memberikan informasi pada pengguna.
Pilih tombol ini untuk menampilkan peringatan.
Ada beberapa ikon pemberitahuan seperti : Informasi, contoh file telah selesai di download melalui AccessSync
Peringatan, AccessSync terputus karena tidak adakoneksi internet
Kritis, lisensi akan berakhir dan aplikasi tidak bisa digunakan
9 Tombol Help Pilih tombol ini untuk membuka file help 10 Tombol Close Dari Menu Utama Trimble Access Klik tombol
ini untuk menutupnya
Pada saat membuka aplikasi gunakan tombol ini untuk keluar dari aplikasi tersebut
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 52
5. Konfigurasi Trimble NetR9 dan
Trimble R4 Untuk Pengukuran
Metode RTK Radio
Daftar Isi :
Pendahuluan
Tujuan Pelatihan
Kerangka Pelatihan
Setting GNSS Trimble NetR9 sebagai Base Station
Pengukuran Metode RTK Radio dengan ADL Vantage
Setting Awal GNSS Trimble NetR9
Pengukuran Metode RTK Radio
Pertanyaan Ulasan
Pembahasan Objektif dari Bab ini
M o d u l
5
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 53
Pendahuluan
Modul ini mencakup informasi mengenai konfigurasi alat Trimble NetR9 yang akan digunakan sebagai base station dan Trimble R4 yang digunakan sebagai rover untuk pengukuran dengan metode RTK Radio.
Tujuan Pelatihan
Tujuan Pelatihan pada bab ini meliputi pemahaman mengenai :
Penjelasan mengenai konfigurasi pada Trimble NetR9 sebagai Base Station dan R4 sebagai Rover
Penjelasan mengenai tahapan pengukuran menggunakan teknologi RTK Radio secara praktis.
Kerangka Pelatihan
Pelatihan ini pada dasarnya meliputi diskusi mengenai :
Setting Awal GNSS Trimble NetR9 dan R4
Pengukuran Metode RTK Radio
5.1 Trimble Net R9 Sebagai
Mobile Base station
Untuk menggunakan Trimble Net R9 sebagai mobile base station, kita harus memilki titik ikat yang digunakan sebagai stasiun atau tempat berdiri alat Trimble Net R9. Hal ini diperlukan karena metode yang digunakan adalah metode real time kinematic (rtk), dimana Trimble Net R9 sebagai base dan Trimble R4 sebagai rover, jadi diperlukan titik ikat fix.
Berikut beberapa perlengkapan alat yang kita butuhkan sebagai berikut: 1. Trimble Net R9
2. Radio ADL Vantage Pacific Crest 3. Antena Zephyr model 2
4. Aki kering 12V 12A
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 54 Gambar 39 : Trimble NetR9 dan Kelengkapan lainnya
6. Kabel antenna (menghubungkan Antena Zephyr model 2 dengan Trimble Net R9)
7. Tribrach dan Tripod
Berikut ilustrasi gambar Trimble Net R9 sebagai Mobile Base Station:
Gambar 40 : Trimble NetR9 sebagai Mobile Base Station
Sebelum menggunakan Trimble R4 sebagai Rover dan Trimble Net R9 sebagai base station. Ada beberapa langkah pengaturan pada Trimble Net R9 yang perlu dilakukan, berikut caranya:
1. Pasang dan sentring alat diatas bench mark (BM).
2. Hubungkan kabel serial port, dan kabel antenna seperti gambar diatas. 3. Hidupkan alat Net R9 dengan cara menekan tombol power, maka
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 55
Gambar 41 : Display Receiver NetR9 untuk Jumlah Satelit
4. Pilih menu Ref Stn Setup dan tekan tombol Enter , akan tampil gambar sebagai berikut
Gambar 42 : Display Receiver Net R9 untuk Setting Base Station (a) 5. Kemudian pilih Edit Current , seperti tampilan gambar dibwah ini,
kemudian tekan tombol Enter .
Gambar 43 : Display Receiver Net R9 untuk Setting Base Station (b) 6. Beri nama base station (base name), dan kode base station (base
code)
Cara pemberian nama berupa huruf dan angka pada base station dengan cara menekan tombol arah atas dan bawah .
Pemberian nama base station
berupa huruf dan angka
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 56 Kemudian untuk spasi dengan cara menekan tombol arah kanan
dan kiri .
Begitu juga sama halnya dengan pemberian nama Base Code, sama seperti pemberian nama untuk Base Name.
7. Setelah pemberian nama base dan nama kode, langkah selanjutnya
tekan tombol enter . Kemudian masukan nilai koordinat geodetik
(latitude, longitude, dan height), dengan cara menekan tombol
arah atas dan bawah . Kemudian untuk spasi dengan cara
menekan tombol arah kanan dan kiri .
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 57
atas dan bawah .
9. Setelah pengaturan antena akan muncul pengaturan port. Pengaturan ini untuk hubungan alat kontroler (misal: Nomad, Recon) dengan Trimble Net R9, jika menggunakan kabel. Karena pengamatan Net R9 sebagai base station tidak menggunakan alat kontroler, jadi pengaturan ini tidak diperlukan.
Pada pengaturan Format data pilih Format RTK CMR+.
10. Pengaturan Logging
Pada pengaturan logging tidak perlu dipilih interval perekaman data, karena Mobile base station tidak merekam data seperti halnya pengamatan statik.
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 58 12. Lihat radio ADL Vantage
Pada Radio ADL Vantage jika Pada Lampu TX berkedip berwarna merah, berarti radio telah terhubung dan dapat mengirimkan koreksi data yang akan diterima oleh Rover Trimble R4. Jika seperti itu maka pengukuran dapat dimulai.
Modul 5 Konfigurasi Trimble NetR9 dan Trimble R4 Untuk Pengukuran Metode RTK Radio 59
5.2
Trimble R4 Sebagai Rover Station
Pasang Receiver Trimble R4 pada range pole kemudian nyalakan dan koneksikan bluetooth dengan controller. Setelah terkoneksi bluetooth, lakukan pengaturan RTK Radio dengan menggunakan software Trimble Access pada controller
Berikut Ilustrasi Trimble R4 sebagai Rover :
Gambar 45 : TrimbleR4 sebagai Rover