Abstrak—Pada penelitian ini menjelaskan state estimation untuk monitoring semua kondisi tegangan bus tetapi menggunakan jumlah sensor yang minimum. Weighted least square (WLS) state estimation merupakan metode untuk menentukan tegangan pada suatu bus tanpa sensor berdasarkan nilai tegangan bus lain pada suatu sistem yang sama. Pada state estimation tidak semua bus bisa dihilangkan sensornya sehingga diperlukan metode untuk menentukan optimal penempatan sensor. Metode yang digunakan untuk menentukan optimal penempatan sensor yaitu particle swarm optimization. Optimal diartikan penempatan jumlah sensor yang minimum tetapi nilai estimasi tegangan masih cukup akurat. Luaran dari metode ini adalah jumlah penempatan sensor untuk state estimation yang memiliki error estimasi tegangan cukup akurat. Hasil simulasi PSO pada empat penyulang jaringan distibusi di Surabaya didapatkan jumlah sensor yang dapat direduksi sekitar 34.5% hingga 55% dibandingkan secara trial and error jumlah sensor dapat direduksi sekitar 33.3% hingga 45% dari jumlah sensor total yang dibutuhkan penyulang. Error tegangan rata-rata yang didapatkan dari penempatan optimal sensor PSO antara 0.0081785 % hingga 0.26906 %. Dari hasil simulasi dapat disimpulkan metode PSO mampu mendapatkan penempatan optimum sensor dengan jumlah sensor paling minimum tetapi estimasi tegangan masih cukup akurat.
Kata Kunci—Particle Swarm Optimization (PSO), Weighted Least Squared (WLS)
I. PENDAHULUAN
ada masa sekarang suatu jaringan listrik memiliki tingkat kompleksitas yang semakin tinggi. Kompleksitas suatu jaringan listrik membuat jumlah bus yang digunakan semakin banyak. Agar sistem jaringan listrik dapat di monitor dengan baik maka diperlukan ketersediaan sensor pengukuran pada setiap bus. Data pengukuran berupa magnitude tegangan dan sudut fasa digunakan untuk menentukan parameter setiap bus. Untuk mendapatkan nilai parameter pengukuran pada semua bus di suatu jaringan listrik maka diperlukan penempatan pengukuran pada tiap bus. Tetapi hal itu akan membutuhkan investasi yang besar karena nilai harga sensor yang tinggi dan juga mahalnya biaya perawatan yang harus dikeluarkan.
Penelitian terkait dengan state estimation yang telah dikerjakan yaitu state estimation menggunakan metode weight least square [1]. Namun tugas akhir tersebut masih
memiliki kekurangan dalam hal penempatan minimum sensor dan lokasi penempatan sensor secara baik. Kekurangan tersebut disebabkan penentuan penempatan sensor yang dilakukan secara try and error sehingga membuat jumlah
penempatan sensor kurang optimal dan lokasi penempatan kurang akurat. Untuk menutupi kekurangan tersebut maka
diperlukan suatu metode Optimalisasi penempatan sensor untuk state estimation. Optimalisasi diartikan jumlah sensor
pengukuran minimum tetapi tetap mendapatkan nilai estimasi yang cukup akurat.
Pada penelitian ini dibuat metode optimalisasi penempatan minimum s ensor untuk state estimation agar didapatkan nilai estimasi tegangan yang cukup akurat. Metode optimalisasi penempatan sensor yang digunakan adalah particle swarm optimization ( PSO ). Kelebihan utama
algoritma PSO adalah mempunyai konsep sederhana, mudah diimplementasikan, dan efisien dalam perhitungan jika dibandingkan dengan algoritma matematika dan teknik optimisasi heuristik lainnya[2]. Sehingga judul tugas akhir yang saya ambil berjudul penempatan optimal sensor untuk
state estimation Weighted Least Squared dengan metode PSO
pada distribusi Surabaya.
II. PENEMPATANOPTIMALSENSOR UNTUKSTATE ESTIMATION
A. Penempatan Optimal Sensor
State estimation dapat digunakan untuk mengurangi jumlah sensor yang dibutuhkan untuk memonitor semua bus di wilayah yang luas. Pada penggunaaan lain, state estimation juga dapat digunakan untuk melakukan koreksi pembacaan pengukuran. Metode state estimation yang digunakan yaitu Weighted least squared (WLS). Pada metode WLS tidak diperbolehkan melakukan penempatan sensor yang minimum secara acak. Tidak semua konfigurasi mampu menghasilkan estimasi yang baik. Pengurangan sensor pada sistem state estimation memiliki syarat sehingga mampu menghasilkan estimasi yang baik. Optimalisasi diperlukan untuk mendapatkan konfigurasi penempatan yang minimum. Fungsi objektif untuk mendapatkan Optimal penempatan sensor sesuai formula dibawah ini :
𝑜𝑏𝑗𝑒𝑐𝑡𝑖𝑣𝑒 𝑓𝑢𝑛𝑐𝑡𝑖𝑜𝑛 = 𝑀𝑖𝑛 { 𝐾 } (2.1)
Fungsi objektif didapatkan dari minimum jumlah sensor pada konfigurasi (K). Konstrain yang harus dipenuhi
pada setiap konfigurasi penempatan sensor ditunjukan pada rumusan 2.2
𝑒 < 𝑡𝑜𝑙 (2.2)
Toleransi ( tol ) yang digunakan sebesar 5%. Nilai
error rata-rata tegangan ( e ) didapatkan dari jumlah error
tegangan ( ErrV ) dibagi jumlah bus ( nbus ) ditunjukan pada
rumusan 2.3. Nilai error tegangan ( ErrV ) didapatkan dengan
menggunakan program state estimation.
Penempatan Optimal Sensor Dengan Metode
Particle Swarm Optimization (PSO) Untuk State
Estimation Pada Sistem Distribusi Surabaya
Aji Dharma, Ontoseno Penangsang, Rony Seto Wibowo
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
: [email protected], [email protected]
𝑒 = ∑𝑛𝑏𝑢𝑠𝑏𝑢𝑠=1𝐸𝑟𝑟𝑉𝑏𝑢𝑠
𝑛𝑏𝑢𝑠 (2.3) B. State Estimation
Metode mendapatkan estimasi pada sistem tenaga listrik bervariasi. Metode klasik yang digunakan untuk memecahkan masalah state estimation yaitu weighted least squares (WLS). Pada suatu sistem tenaga listrik didapatkan besar nilai random error pengukuran pada posisi bus yang tidak diketahui. Metode WLS menghitung nilai estimasi terbaik dari bus yang tidak terdapat pengukuran . Estimasi dilakukan dengan melihat bus yang terdapat data pengukuran[3].
Data pengukuiran didapatkan pada sistem tenaga listrik adalah daya injeksi, aliran daya saluran, arus, posisi transformer dan tegangan magnitude. Tegangan magnitude dan sudut fasa bus adalah variabel yang diestimasi. Weighted least squares memiliki kemampuan mendapatkan estimasi variabel dengan sedikit jumlah data pengukuran yang tersedia [4]. Fungsi pengukuran memiliki nilai yang non linear. Perhitungan WLS digunakan untuk memperoleh nilai residu error niali estimasi dengan nilai sebenarnya. Hal tersebut dapat dilihat pada persamaan 2.4 dibawah ini :
Z = [ 𝑧1 𝑧2 . . . 𝑧𝑚] = [ ℎ1(𝑥1 ,𝑥2, . . . , 𝑥𝑛) . . . . . . . . . . . . ℎ𝑚(𝑥1 ,𝑥2, . . . , 𝑥𝑛)] + [ 𝑒1 𝑒2 . . . 𝑒𝑚] = ℎ(𝑥) + 𝑒 (2.4) Fungsi pengukuran (Z) terdiri dari jumlah variabel
pengukuran (m) yang dipakai state estimation. Nilai fungsi
pengukuran merupakan hasil penjumlahan dari fungsi non linear antara pengukuran dan vektor state (ℎ(𝑥)) dengan vektor error pengukuran (e) pada setiap pengukuran.
fungsi objektif dapat diminimalkan dengan weighted least squares pada persamaan 2.5 dibawah ini :
𝐽(𝑥) = ∑[𝑍𝑖− ℎ𝑖 (𝑥)]2 𝑅𝑖𝑖2 ∞
𝑛=1
= [𝑧 − ℎ(𝑥)]𝑇 𝑅−1[𝑧 − ℎ(𝑥)] (2.5)
Persamaan diatas adalah square diantara setiap nilai pengukuran dan nilai sebenarnya dibagi dengan kovarian error. Gradient fungsi objektif ( vektor residu ) diambil dan disamakan dengan nol. Pada algoritma state estimation diatas merupakan gambaran secara umum. Matriks h yang
merupakan fungsi non-linier dari data pengukuran didefinisikan pada Persamaan 2.6.
ℎ = [ ℎ1 ℎ2 ℎ3 ℎ4 ℎ5 ] (2.6)
Setiap komponen h memiliki definisi fungsi non-linier.
Fungsi non-linier berupa tegangan magnitude (Vmag), injeksi
daya aktif (𝑃𝑖𝑛𝑗 i), injeksi daya reaktif (𝑄𝑖𝑛𝑗 i ), aliran daya
aktif (𝑃𝑓𝑙𝑜𝑤 ik), dan aliran daya reaktif (𝑄𝑓𝑙𝑜𝑤 ik). Setiap
komponen akan dijelaskan pada persamaan 2.7, 2.8, 2.9, 2.10 dan 2.11 [3]. ℎ1= 𝑉𝑚𝑎𝑔1 = 1 (2.7) ℎ2= 𝑃𝑖𝑛𝑗 i= ∑|𝑉i||𝑉k| 𝑁 𝑘=1 (𝐺𝑖𝑘 𝑐𝑜𝑠(𝜃𝑖− 𝜃𝑘) + 𝐵𝑖𝑘 𝑠𝑖𝑛(𝜃𝑖− 𝜃𝑘)) (2.8) ℎ3= 𝑄𝑖𝑛𝑗 i = ∑|𝑉i||𝑉k| 𝑁 𝑘=1 (𝐺𝑖𝑘 𝑠𝑖𝑛(𝜃𝑖− 𝜃𝑘) − 𝐵𝑖𝑘 𝑐𝑜𝑠(𝜃𝑖− 𝜃𝑘)) (2.9) ℎ4= 𝑃𝑓𝑙𝑜𝑤 ik= |𝑉i||𝑉k|(𝐺𝑖𝑘 𝑐𝑜𝑠(𝜃𝑖− 𝜃𝑘) + 𝐵𝑖𝑘 𝑠𝑖𝑛(𝜃𝑖− 𝜃𝑘)) − |𝑉i||𝑉i|𝐺𝑖𝑘 (2.10) ℎ5= 𝑄𝑓𝑙𝑜𝑤 ik= |𝑉i||𝑉k|(𝐺𝑖𝑘 𝑠𝑖𝑛 (𝜃𝑖− 𝜃𝑘) − 𝐵𝑖𝑘𝑐𝑜𝑠(𝜃𝑖− 𝜃𝑘)) + |𝑉i||𝑉i|𝐵𝑖𝑘 (2.11)
Pada rumusan diatas berupa rumusan yang terdiri dari jumlah bus (N), konduktansi antara bus i dengan bus k (𝐺𝑖𝑘),
dan suseptansi antara bus i dengan bus k (𝐵𝑖𝑘). Matriks
jacobian adalah matriks semua turunan parsial orde pertama dari suatu nilai fungsi parameter. Data jenis pengukuran diturunkan satu orde berdasarkan tegangan dan sudutnya. Komponen matriks jacobian dalam Tugas Akhir ini ditunjukkan pada Persamaan 2.12 [3].
𝐻 = [ 0 𝜕𝑉𝑚𝑎𝑔 𝜕𝑉 𝜕𝑃𝑖𝑛𝑗 𝜕𝜃 𝜕𝑃𝑖𝑛𝑗 𝜕𝑉 𝜕𝑄𝑖𝑛𝑗 𝜕𝜃 𝜕𝑄𝑖𝑛𝑗 𝜕𝑉 𝜕𝑃𝑓𝑙𝑜𝑤 𝜕𝜃 𝜕𝑃𝑓𝑙𝑜𝑤 𝜕𝑉 𝜕𝑄𝑓𝑙𝑜𝑤 𝜕𝜃 𝜕𝑄𝑓𝑙𝑜𝑤 𝜕𝑉 ] (2.12)
Matriks jacobian ini digunakan untuk mendapatkan gain matriks. Gain matriks digunakan untuk mencari nilai selisih tegangan (∆𝐸). Gain matriks didapatkan dengan cara mengalikan matriks jacobian dengan transpose matriks (𝐻T)
kemudian membaginya dengan nilai toleransi error (𝑅−1) dari
alat pengukuran maka akan didapatkan gain matriks seperti pada Persamaan 2.13 [3].
𝐺 = 𝐻T . 𝑅−1 . 𝐻 (2.13)
Selisih tegangan (∆𝐸) didapatkan dari hasil perkalian dari transpose matriks jacobian dengan residual pengukuran
(r) dan membaginya dengan gain matriks dan nilai toleransi
error dari alat pengukuran. Operasi ini dapat dilihat pada Persamaan 2.14 [4].
∆𝐸 = 𝐺−1 . 𝐻T . 𝑅−1. 𝑟 (2.14)
Apabila terjadi drop tegangan, nilai selisih tegangan
akan bernilai negatif. Selisih tegangan ini kemudian ditambahkan dengan nilai magnitude tegangan awal seperti pada Persamaan 2.15 [4].
𝐸 = 𝐸 + ∆𝐸 (2.15) III. PENEMPATAOPTIMALSENSORDENGAN METODEPARTICLESWARMOPTIMIZATION(PSO)
UNTUKSTATEESTIMATION.
A. Particle Swarm Optimization
Pertama kali algoritma Particle Swarm Optimization diperkenalkan oleh Dr. Kennedy dan Dr. Eberhart pada tahun 1995. Dasar ide algoritma tersebut terinspirasi dari perilaku sosial hewan. Perilaku sosial berupa proses alami untuk saling berkomunikasi dalam berbagi pengetahuan individu ketika mencari makanan dan bermigrasi pada suatu kelompok seperti sekelompok burung , sekelompok lebah dan sebagainya. Saat salah satu anggota mendapatkan jalur yang diinginkan maka sisa anggota lain akan mengikuti secara cepat[4]. Algoritma PSO dapat diaplikasikan untuk mendapatkan posisi sensor pada weighted least squares state estimation. Optimisasi untuk WLS dapat digunakan dalam penentuan minimum penempatan sensor sehingga didapatkan estimasi yang cukup akurat. Pada algoritama PSO terdapat model untuk mendapatkan nilai optimasi salah satunya Global Best PSO.
B. Global Best PSO
Metode global best PSO adalah metode yang posisi partikel dipengaruhi oleh partikel yang memiliki nilai terbaik pada sekumpulan partikel. Setiap partikel memiliki posisi pada suatu ruang dan nilai pergerakan. Optimal penempatan sensor didapatkan dari minimum penempatan sensor dari partikel terbaik secara global (
𝐺
𝑏𝑒𝑠𝑡,𝑗𝑘 ). Pada sistem stateestimation jaringan distribusi akan dioptimisasi penempatan minimum sensor tetapi tetap mendapatkan nilai estimasi tegangan yang cukup akurat. Langkah – langkah untuk mendapatkan optimisasi tersebut digambarkan pada diagram alir Gambar 3.1. Aliran algoritma PSO dapat didefinisikan sebagai berikut:
1. Set iterasi k = 0
2. Inisialisasi berupa jumlah partikel akan dipakai pada PSO, inisialisasi dan jumlah iterasi ( k ), nilai koefisien akselerasi ( c1 dan c2 ), beban maksimum ( wmax )dan beban minimum partikel ( wmin ).
3. Posisi awal partikel ( 𝑥𝑖𝑗0 ) berupa nilai random
sesuai besar dimensi pada setiap partikel. Kecepatan awal partikel ( 𝑣𝑖𝑗0 ) berupa nilai nol.
4. Menghitung hasil fitness untuk semua partikel menggunakan weighted leat squared state estimation.
5. Memilah partikel yang sesuai konstain. Lalu membandingkan hasil fitness pada setiap partikel. 6. Hasil fitness akan dibandingkan sehingga
didapatkan partikel memiliki hasil fitness berupa jumlah sensor minimum paling minimum pada setiap iterasi (𝑃𝑏𝑒𝑠𝑡,𝑖𝑘 ) dan partikel yang memiliki
hasil fitness terbaik pada iterasi yang sudah dilewati (𝐺𝑏𝑒𝑠𝑡,𝑖𝑘 ).
7. Update nilai posisi partikel ( 𝑥𝑖𝑗𝑘+1 ) dengan
penambahan nilai velocity( 𝑣𝑖𝑗𝑘+1 ).
8. Update k=k+1, jika k = jumlah iterasi. Stop simulasi Data posisi partikel (𝑥𝑖𝑗𝑘) berupa matriks yang
memiliki dimensi. Matrik posisi partikel memiliki dimensi
yang dibentuk dari jumlah data tiap partikel (m) dan jumlah partikel pada swarm (n). Nilai data setiap partikel didapatkan secara random sesuai dimensi. Matriks akan ditunjukan pada persamaan 3.1. 𝑥𝑖𝑗𝑘 = || x11𝑘 𝑥12𝑘 . . . 𝑥1𝑚𝑘 𝑥21𝑘 . . . . 𝑥2𝑚𝑘 . . . . 𝑥𝑛1 𝑘 . . . . . 𝑥𝑛𝑚𝑘 || (3.1)
Nilai posisi partikel diperbaruhi pada setiap iterasi dengan dipengaruhi nilai velocity (𝑣𝑖𝑘+1). Nilai velocity
didapatkan dari pengalaman partikel (𝑥𝑖𝑘) dan pengalaman
yang diperoleh oleh partikel lain pada group (𝑃𝑏𝑒𝑠𝑡,𝑖𝑘 𝑑𝑎𝑛 𝐺𝑏𝑒𝑠𝑡,𝑖𝑘 ). Velocity setiap partikel diperoleh
dengan persamaan 3.2.
𝑣𝑖𝑘+1= 𝑤𝑘 𝑥 𝑣𝑖𝑘+ 𝑐1 𝑥 𝑟𝑎𝑛𝑑1 𝑥 (𝑃𝑏𝑒𝑠𝑡𝑖𝑘 − 𝑥𝑖𝑘) (3.2)
+ 𝑐2 𝑥 𝑟𝑎𝑛𝑑2 𝑥 (𝐺𝑏𝑒𝑠𝑡𝑖𝑘 − 𝑥𝑖𝑘)
Pengalaman partikel lain berupa partikel terbaik setiap iterasi 𝑃𝑏𝑒𝑠𝑡,𝑖𝑘 dan partikel terbaik pada interval
iterasi 𝐺𝑏𝑒𝑠𝑡,𝑖𝑘 akan sangat mempengaruhi pergerakan partikel.
Koefisien akselerasi (c1 dan c2) berdampak besar kontribusi partikel 𝑃𝑏𝑒𝑠𝑡,𝑖𝑘 𝑑𝑎𝑛 𝐺𝑏𝑒𝑠𝑡,𝑖𝑘 terhadap velocity partikel.
Kondisi nilai c1 lebih besar dibanding c2 maka kontribusi partikel 𝑃𝑏𝑒𝑠𝑡,𝑖𝑘 lebih besar dan sebaliknya.
Nilai inersia (𝑤𝑘) akan selalu berubah pada setiap
iterasi. Perubahan nilai akan dipengaruhi jumlah iterasi dan nilai beban inersia maksimum dan minimum (𝑤𝑚𝑎𝑥 dan
𝑤𝑚𝑖𝑛). Beban inersia memiliki interval sebesar perbedaan
beban inersia maksimum dengan beban inersia minimum. Nilai beban inersia setiap iterasi diperoleh dengan persamaan 3.3 dibawah ini [5].
𝑤𝑘 = 𝑤
𝑚𝑎𝑥−𝑤𝑚𝑎𝑥𝑤−𝑤𝑚𝑖𝑛
𝑚𝑎𝑥 𝑥 𝑘 (3.3) Setiap pergantian iterasi maka posisi partikel baru (𝑥𝑗𝑘+1) didapatkan dengan menjumlahkan posisi partikel
pada iterasi sebelumnya (𝑥𝑗𝑘) dengan velocity (𝑣𝑗𝑘+1). Nilai
posisi pada setiap iterasi diperbarui dengan persamaan 3.4 dibawah ini.
𝑥𝑗𝑘+1= 𝑥𝑗𝑘+ 𝑣𝑗𝑘+1 (3.4)
Nilai hasil fitnes partikel ( 𝑓(𝑥𝑗𝑘) ) berupa jumlah
penempatan sensor. Nilai personal best (𝑃𝑏𝑒𝑠𝑡𝑗𝑘 ) didapatkan
dengan mencari nilai minimum penempatan sensor yang memiliki error pengukuran yang cukup akurat pada setiap iterasi. Partikel yang memiliki jumlah sensor paling minimum menjadi nilai personal best sesuai dengan perhitungan 3.5 dan 3.6 dibawah [5].
𝑓(𝑥𝑗𝑘) = 𝑠𝑢𝑚(𝑥𝑗𝑘) (3.5)
𝑃𝑏𝑒𝑠𝑡𝑗𝑘+1 = {
𝑃𝑏𝑒𝑠𝑡𝑗𝑘 𝑖𝑓 𝑓(𝑥𝑗𝑘+1) > 𝑓𝑝𝑏𝑒𝑠𝑡𝑗𝑘
𝑥𝑗𝑘+1 𝑖𝑓 𝑓(𝑥𝑗𝑘+1) < 𝑓𝑝𝑏𝑒𝑠𝑡𝑗𝑘 (3.6)
Nilai global best 𝐺𝑏𝑒𝑠𝑡𝑗𝑘 didapatkan dengan mencari
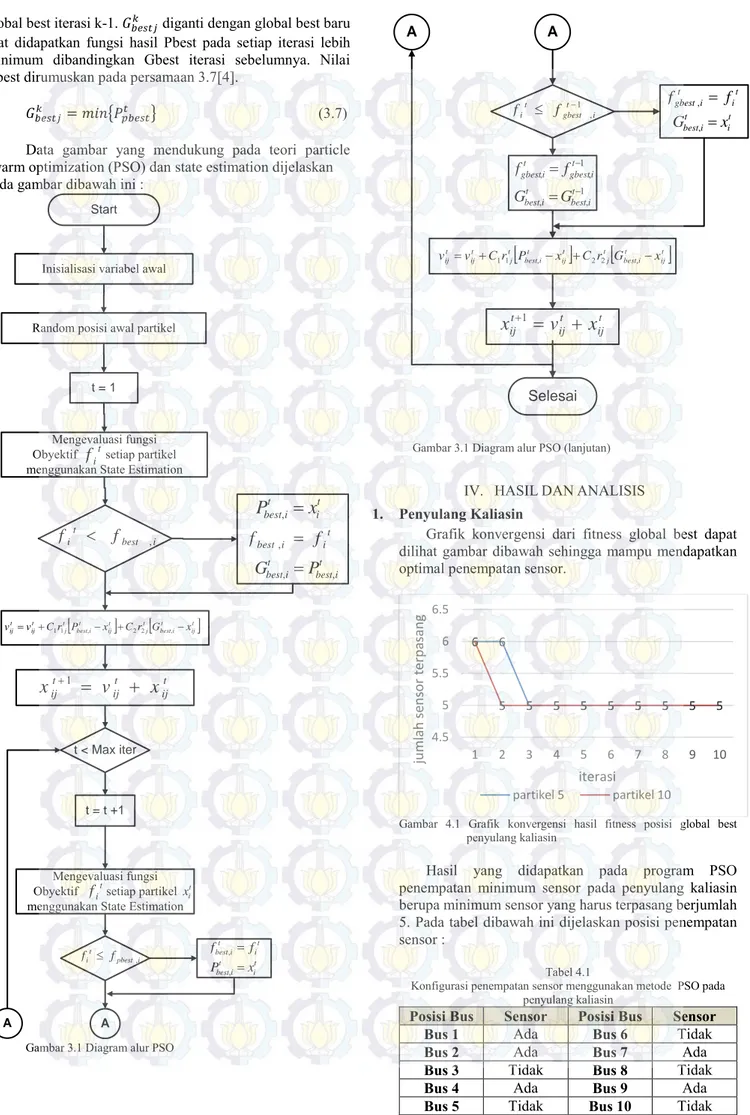
global best iterasi k-1. 𝐺𝑏𝑒𝑠𝑡𝑗𝑘 diganti dengan global best baru
saat didapatkan fungsi hasil Pbest pada setiap iterasi lebih minimum dibandingkan Gbest iterasi sebelumnya. Nilai Gbest dirumuskan pada persamaan 3.7[4].
𝐺𝑏𝑒𝑠𝑡𝑗𝑘 = 𝑚𝑖𝑛{𝑃𝑝𝑏𝑒𝑠𝑡𝑡 } (3.7)
Data gambar yang mendukung pada teori particle swarm optimization (PSO) dan state estimation dijelaskan pada gambar dibawah ini :
Start
Inisialisasi variabel awal
Random posisi awal partikel
Mengevaluasi fungsi Obyektif setiap partikel menggunakan State Estimation
t i
f
i best t if
f
, t = 1 t i i bestf
f
,
t i t i bestx
P
,
t i best t i bestP
G
,
, t ij t ij t ijv
x
x
1
t
ij t i best t j t ij t i best t j t ij t ij v Cr P x C r G x v 11 , 22 , t < Max iter t = t +1 A Mengevaluasi fungsi Obyektif setiap partikel menggunakan State Estimationt i f i pbest t i f f , t i t i best f f , t i t i best x P , t i x A
Gambar 3.1Diagram alur PSO
t i t i gbest
f
f
,
t i t i bestx
G
,
t ij t ij t ijv
x
x
1
t
ij t i best t j t ij t i best t j t ij t ij v Cr P x C r G x v 11 , 2 2 , Selesai A 1 , t i gbest t i f f 1 , ,
gbestt i t i gbestf
f
1 , ,
t i best t i bestG
G
AGambar 3.1Diagram alur PSO (lanjutan) IV. HASILDANANALISIS 1. Penyulang Kaliasin
Grafik konvergensi dari fitness global best dapat dilihat gambar dibawah sehingga mampu mendapatkan optimal penempatan sensor.
Gambar 4.1 Grafik konvergensi hasil fitness posisi global best penyulang kaliasin
Hasil yang didapatkan pada program PSO penempatan minimum sensor pada penyulang kaliasin berupa minimum sensor yang harus terpasang berjumlah 5. Pada tabel dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.1
Konfigurasi penempatan sensor menggunakan metode PSO pada penyulang kaliasin
Posisi Bus Sensor Posisi Bus Sensor
Bus 1 Ada Bus 6 Tidak
Bus 2 Ada Bus 7 Ada
Bus 3 Tidak Bus 8 Tidak
Bus 4 Ada Bus 9 Ada
Bus 5 Tidak Bus 10 Tidak
6 6 5 5 5 5 5 5 5 5 6 5 5 5 5 5 5 5 5 5 4.5 5 5.5 6 6.5 1 2 3 4 5 6 7 8 9 10 ju m lah se n so r terp asan g iterasi partikel 5 partikel 10
Jumlah minimum penempatan sensor tersebut berdasarkan estimasi yang dihasilkan masih cukup akurat. Dengan menggunakan program particle swarm optimization mendapatkan maksimum pengurangan sensor berjumlah 50% dijelaskan pada tabel dibawah ini. Pada tabel dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.2
Perbandingan error rata-rata estimasi penyulang kaliasin. Konfigurasi sensor Rata-rata
error estimasi (%)
Pengurangan sensor (%) Metode try and error
(Sensor pada
bus1,2,4,6,7 dan 10) 0.00178 40% Menggunakan
metode PSO 0.26906 50%
2. Penyulang Basuki Rahmat
Grafik konvergensi dari fitness global best dapat dilihat gambar dibawah sehingga mampu mendapatkan optimal penempatan sensor.
Gambar 4.2 Grafik konvergensi hasil fitness posisi global best penyulang basuki rahmat
Hasil yang didapatkan pada program PSO penempatan minimum sensor pada penyulang kaliasin berupa maksimum pengurangan sensor berjumlah 10. Dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.3
Konfigurasi penempatan sensor menggunakan metode PSO pada penyulang basuki rahmat
Posisi Bus Sensor Posisi Bus Sensor
Bus 1 Ada Bus 16 Ada
Bus 2 Ada Bus 17 Tidak
Bus 3 Ada Bus 18 Ada
Bus 4 Ada Bus 19 Ada
Bus 5 Tidak Bus 20 Tidak
Bus 6 Ada Bus 21 Ada
Bus 7 Tidak Bus 22 Tidak
Bus 8 Ada Bus 23 Ada
Bus 9 Ada Bus 24 Tidak
Bus 10 Ada Bus 25 Ada
Bus 11 Ada Bus 26 Tidak
Bus 12 Ada Bus 27 Ada
Bus 13 Tidak Bus 28 Tidak
Bus 14 Ada Bus 29 Ada
Bus15 Tidak
Jumlah minimum penempatan sensor tersebut berdasarkan estimasi yang dihasilkan masih cukup akurat. Dengan menggunakan program particle swarm optimization mendapatkan maksimum pengurangan sensor berjumlah 34.58%. Pada tabel dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.4
Perbandingan error rata-rata estimasi penyulang basuki rahmat. Konfigurasi sensor Rata-rata
error estimasi (%)
Pengurangan sensor (%) Try and error
(bus1,2,3,4,6,8,9,10,11 ,12,14,16,18,19,21,23, 25,27 dan 29) 0.00218 31.034% Menggunakan metode PSO 0.008357 34.58% 3. Penyulang Omertraco
Grafik konvergensi dari fitness global best dapat dilihat gambar dibawah sehingga mampu mendapatkan optimal penempatan sensor.
Gambar 4.3 Grafik konvergensi hasil fitness posisi global best penyulang Ometraco.
Hasil yang didapatkan pada program PSO penempatan minimum sensor pada penyulang kaliasin berupa maksimum pengurangan sensor berjumlah 7. Pada tabel dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.5
Konfigurasi penempatan sensor menggunakan metode PSO pada penyulang ometraco.
Posisi Bus Sensor Posisi Bus Sensor
Bus 1 Ada Bus 8 Tidak
Bus 2 Ada Bus 9 Tidak
Bus 3 Tidak Bus 10 Ada
Bus 4 Ada Bus 11 Tidak
Bus 5 Tidak Bus 12 Ada
Bus 6 Ada Bus 13 Tidak
Bus 7 Tidak
Jumlah minimum penempatan sensor tersebut berdasarkan estimasi yang dihasilkan masih cukup akurat. Dengan menggunakan program particle swarm 18.4 18.6 18.8 19 19.2 19.4 19.6 19.8 20 20.2 1 2 3 4 5 6 7 8 9 ju m lah s en sor te rp as an g Iterasi partikel 10 partikel 20 8 7 7 7 6 6 6 6 6 6 8 7 7 6 6 6 6 6 6 6 0 2 4 6 8 10 1 2 3 4 5 6 7 8 9 10 ju mla h s en so r terp as an g Iterasi partikel 5 partikel 10
optimization mendapatkan maksimum pengurangan sensor berjumlah 53.8%. Pada tabel dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.6
Perbandingan error rata-rata estimasi penyulang ometraco. Konfigurasi sensor Rata-rata
error estimasi (%)
Pengurangan sensor (%) Secara try and
error (bus 1,2,4,6,7,8,9,11 dan 12) 0.00889 38.5% Menggunakan metode PSO 0.079857 53.8% 4. Penyulang Tegalsari
Grafik konvergensi dari fitness global best dapat dilihat gambar dibawah sehingga mampu mendapatkan optimal penempatan sensor.
Gambar 4.4 Grafik konvergensi hasil fitness posisi global best penyulang tegalsari.
Hasil yang didapatkan pada program PSO penempatan minimum sensor pada penyulang kaliasin berupa maksimum pengurangan sensor berjumlah 10. Dibawah ini dijelaskan posisi penempatan sensor. Pada tabel dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.7
Konfigurasi penempatan sensor menggunakan metode PSO pada penyulang Tegalsari.
Posisi Bus Sensor Posisi Bus Sensor
Bus 1 Ada Bus 11 Tidak
Bus 2 Ada Bus 12 Tidak
Bus 3 Tidak Bus 13 Ada
Bus 4 Ada Bus 14 Tidak
Bus 5 Tidak Bus 15 Ada
Bus 6 Ada Bus 16 Tidak
Bus 7 Tidak Bus 17 Ada
Bus 8 Ada Bus 18 Tidak
Bus 9 Tidak Bus 19 Ada
Bus 10 Ada Bus 20 Tidak
Jumlah minimum penempatan sensor tersebut berdasarkan estimasi yang dihasilkan masih cukup akurat. Dengan menggunakan program particle swarm optimization mendapatkan maksimum pengurangan sensor berjumlah 50%. Pada tabel dibawah ini dijelaskan posisi penempatan sensor :
Tabel 4.8
Perbandingan error rata-rata estimasi penyulang tegal sari. Konfigurasi sensor Rata-rata
error estimasi (%)
Pengurangan sensor (%) Try and error
(bus1,2,4,6,8,10,12,
14,16,17,19) 0.00878 45%
Menggunakan
metode PSO 0.0616 50%
V. KESIMPULAN
Dari hasil pembahasan pada Tugas Akhir ini dapat diambil beberapa kesimpulan, diantaranya :
1. Hasil simulasi PSO mendapatkan optimal penempatan sensor pada beberapa penyulang sistem distribusi Surabaya. Jumlah reduksi sensor menggunakan metode PSO sekitar 34.5% hingga 55%. Jumlah reduksi lebih baik dibandingkan penempatan sensor secara try and error dengan reduksi sensor sebesar 33.3% hingga 45%. 2. Kualitas penempatan sensor menggunakan metode PSO dipengaruhi nilai random awal. Untuk mendapatkan posisi optimal penempatan sensor maka harus dilakukan percobaan berulang.
3. Hasil estimasi tegangan saat penempatan sensor menggunakan metode PSO masih cukup akurat. Error
rata-rata tegangan estimasi yang dihasilkan masih dibawah 1%.
DAFTARPUSTAKA
[1] Maickel Tuegeh, Soeprijanto, Mauridhi H Purnomo. “Modified Improved Particle Swarm Optimization For Optimal Generator Scheduling”,SNATI 2009Transm. Distrib., Vol. 150, No. 5, September 2003
[2] Ardyan Bhakti Setyarso,”Penentuan daya reaktif untuk perbaikan kualitas daya berdasarkan voltage state estimation pada jaringan distribusi radial 20kv di Surabaya”, Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember, Surabaya, 2013
[3] J. Wood, Allen and Wollenberg, Bruce F. “Power Generation and Operation Control (Second Edition)”,
John Wiley & Sons Inc, United States of America, 1996. [4] Kamini Kousalya Sekaran. “Power System State
Estimation”, thesis for degree of master of engineering
faculty of engineering and applied science memorial university of Newfoundland,September, 2008.
[5] Satyobroto Talukder. “Mathematical Modelling and Applications Of Particle Swarm Optimization”.
Master’s thesis of the school of engineering at blekinge institute of technology, february, 2011.
0 5 10 15 1 2 3 4 5 6 7 8 9 10 Ju m lah s en so r terp asan g Iterasi partikel 10 partikel 20