i
TUGAS AKHIR – MN091387
Analisa Beban Gelombang pada Konstruksi Kapal
Perang Tipe Corvette di Kondisi Perairan Indonesia
Denis Ibrahim Perdana
N.R.P. 4108 100 019
Dosen Pembimbing
Aries Sulisetyono, S.T, MASc, Ph.D
Jurusan Teknik Perkapalan
Fakultas Teknologi Kelautan
Institut Teknologi Sepuluh Nopember
Surabaya
ii
LEMBAR PENGESAHAN
Analisa Beban Gelombang Terhadap Konstruksi Kapal Perang Tipe
Corvette di Kondisi Perairan Indonesia
TUGAS AKHIR
Diajukan Guna Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
pada
Bidang Studi Rekayasa Perkapalan Jurusan Teknik Perkapalan Fakultas Teknologi Kelautan Institut Teknologi Sepuluh Nopember
Oleh:
Denis Ibrahim Perdana NRP. 4108 100 019
Disetujui oleh Dosen Pembimbing Tugas Akhir
(_________________________) Aries Sulisetyono, S.T, MASc, Ph.D
NIP. 19710320 199512 1 002
iii
LEMBAR REVISI
Analisa Beban Gelombang Terhadap Konstruksi Kapal Perang Tipe
Corvette di Kondisi Perairan Indonesia
TUGAS AKHIR
Telah direvisi sesuai dengan hasil Ujian Tugas Akhir Tanggal 04 Juli 2013
Bidang Keahlian Rekayasa Perkapalan – Hidrodinamika Program S1 Jurusan Teknik Perkapalan
Fakultas Teknologi Kelautan Institut Teknologi Sepuluh Nopember
Oleh:
Denis Ibrahim Perdana NRP. 4108 100 019
Disetujui oleh Tim Penguji Ujian Tugas Akhir:
Muhammad Nurul Misbach, S.T., M.T. ……..………..………..
NIP 19730404 199702 1 001
Prof.Dr.I Ketut Aria Pria Utama, M.Sc. ……..………..……….. NIP 19670406 199203 1 001
Disetujui oleh Dosen Pembimbing Tugas Akhir:
Dr. Aries Sulisetyono, S.T., MA.Sc. ……..………..………..
NIP 19710320 199512 1 002
iv
KATA PENGANTAR
Segala puji bagi Allah SWT atas segala rahmat dan nikmat yang dianugerahkan kepada penulis sehingga penulis dapat menyelesaikan tugas akhir ini. Dan semoga shalawat dan salam semoga selalu tercurahkan kepada Nabi Muhammad SAW beserta keluarga dan para sahabatnya yang telah membimbing umat manusia kepada jalan yang diridhai Allah SWT.
Tiada kata yang bisa penulis sampaikan selain terima kasih setulus hati kepada: 1. Segenap keluarga besar penulis, yang selalu memberi segala yang terbaik untuk penulis.
2. Bapak Aries Sulisetyono, S.T., MA.Sc., Ph.D selaku dosen pembimbing yang telah meluangkan waktu dan kesabarannya untuk membimbing penulis serta memberikan arahan selama pengerjaan tugas akhir ini.
3. Bapak Prof. Ir. I Ketut Aria Pria Utama, M.Sc., Ph.D., selaku Ketua Jurusan Teknik Perkapalan sekaligus dosen wali penulis semasa menempuh pendidikan di Teknik Perkapalan FTK ITS serta segenap dosen & karyawan Jurusan Teknik Perkapalan FTK ITS.
4. Segenap rekan-rekan mahasiswa ITS pada umumnya, dan mahasiswa Teknik Perkapalan FTK-ITS pada khususnya, yang telah belajar, berkarya dan berjuang bersama penulis. Serta spesial untuk dulur-dulur BRANDALZ, only God can stop us!.
5. Semua pihak yang tidak dapat disebutkan satu per satu yang telah membantu baik secara langsung maupun tidak langsung dalam pengerjaan tugas akhir ini.
Penulis menyadari bahwa Tugas Akhir ini masih memiliki beberapa kekurangan. Untuk itu, penulis mengharapkan saran dan kritik demi kesempurnaan tugas akhir ini. Besar harapan penulis agar tugas akhir ini dapat bermanfaat bagi perkembangan dunia perkapalan Indonesia.
Surabaya, 24 Juni 2013
v
ANALISA BEBAN GELOMBANG TERHADAP KONSTRUKSI KAPAL
PERANG TIPE CORVETTE DI KONDISI PERAIRAN INDONESIA
Nama Mahasiswa
: Denis Ibrahim Perdana
NRP
: 41018100019
Jurusa/Fakultas
: Teknik Perkapalan/Teknologi Kelautan
Dosen Pembimbing
: Aries Sulisetyono, S.T, MASc, Ph.D
ABSTRAK
Sebagai desainer kapal yang baik haruslah dapat memperkirakan beban-beban yang akan terjadi pada kapal. Salah satu beban yang penting adalah beban gelombang. Beban gelombang dianggap penting karena dapat menyebabkan bending moment pada kapal pada saat berlayar. Saat terjadi bending moment pada kapal, kapal mengalami tegangan yang berakibat kepada ketahanan badan kapal. Bahkan pada kondisi ekstrem bending moment dapat membuat kapal patah dikarenakan tegangan yang melebihi tegangan ijin. Banyak metode yang dapat digunakan dalam menghitung dan menganalisa beban gelombang mulai dari metode numerik maupun eksperimental. Pada saat mengerjakan tugas akhir ini penulis menggunakan metode numerik dengan media perangkat lunak. Perangkat lunak yang dipakai terlebih dahulu dilakukan proses validasi data dengan membandingkan dengan hasil dari perangkat lunak lainnya. Pada proses validasi penulis membandingkan data dari program WAMITS dengan program Ansys Aqwa. Untuk meningkatkan keakuratan perhitungan digunakan beberapa variasi seperti kecepatan, wave heading, dan kondisi perairan mulai dari sea state 4 sampai dengan 7. Berdasarkan hasil perhitungan,bending moment maksimal terletak pada bagian midship kapal. Menurut peraturan klasifikasi Lloyd’s Register (LR) kekuatan memanjang kapal telah memenuhi requirement.
vi
WAVE LOADS ANALYSIS OF WARSHIPS TYPE CORVETTE IN
INDONESIA WATER CONDITION
Name
: Denis Ibrahim Perdana
NRP
: 41018100019
Department/Faculty
: Naval Architecture/Marine Technology
Supervisor
: Aries Sulisetyono, S.T, MASc, Ph.D
ABSTRACT
As a good ship designers must be able to estimate loads that will happen on the ship. One of the critical load is the wave loads. Wave loads are considered important because it can lead to bending moment on the ship when sailing. During a bending moment on the ship, the ship had resulted in hull’s resistance. Even in conditions of extreme bending moment can make fracture in ship because stress exceeds the allowable stress. There are many methods that can be used in calculating and analyzing the wave loads ranging from numerical and experimental methods. At the time of working on this final project the author uses numerical methods with software as the media. Before use, the software first through the validation phase. In the validation process the authors compared data from WAMITS program with Ansys AQWA program. To improve the accuracy of the calculations, author used several variations such as speed, wave heading, and water conditions ranging from sea state 4 to 7. Based on calculations, the maximum bending moment is located at the midship. According to the classification rules Lloyd's Register (LR) longitudinal strenght of that ship has met the requirement.
vii
DAFTAR ISI
LEMBAR PENGESAHAN ... ii
LEMBAR REVISI ... iii
KATA PENGANTAR ... iv
ABSTRAK ... v
ABSTRACT ... vi
DAFTAR ISI ... vii
DAFTAR GAMBAR ... x
DAFTAR TABEL ... xii
BAB I ... 1
PENDAHULUAN ... 1
I.1 Latar Belakang ... 1
I.2 Rumusan Masalah ... 1
I.3 Batasan Masalah ... 2
I.4 Tujuan ... 3
I.5 Manfaat ... 3
I.6 Hipotesis ... 3
I.7 Sistematika Penulisn ... 4
BAB II ... 5
TINJAUN PUSTAKA ... 5
II.1 Tinjauan Umum Kapal Perang ... 5
II.2 Gerak Kapal ... 6
II.3 Pengaruh Gerak Kapal dan Beban Gelomabang ... 7
II.4 Spektrum Gelombang ... 8
II.4.1 Spektrum Pierson-Moskowitz ... 8
II.4.2 Spektrum JONSWAP ... 9
II.5 Gerakan Struktur pada Gelombang Beraturan ... 9
viii
II.7 Beban Hidrostatik ... 11
II.8 Beban Gelombang pada Kapal ... 13
II.8.1 Froude-Krylove Force ... 13
II.8.2 Added Mass ... 13
II.8.3 Shear Force ... 14
II.8.4 Bending Moment ... 14
II.9 Tegangan ... 16
II.10 Ansys Aqwa ... 16
BAB III ... 18
METODE PENELITIAN ... 18
III.1 Diagram Alir ... 18
III.2 Studi Literatur ... 19
III.2.1 Beban Gelombang ... 19
III.2.2 Ansys Aqwa ... 19
III.2.3 Validasi ... 19
III.3 Permodelan Kapal di Program Maxsurf Pro ... 24
III.4 Permodelan Panel-panel Kapal di Program Ansys Aqwa ... 24
III.5 Perhitungan Beban Gelombang di Program Ansys Aqwa ... 24
III.6 Analisa Data ... 26
III.7 Membuat Kesimpulan ... 26
BAB IV ... 27
HASIL PERHITUNGAN DAN PEMBAHASAN ... 27
IV.1 Hasil Permodelan Kapal Perang Tipe Corvette di Maxsurf Pro ... 27
IV.2 Hasil Meshing Kapal Perang Tipe Corvette di Program Ansys Aqwa... 27
IV.3 RAO Kapal Perang Tipe Corvette... 29
IV.4 Shear Force dan Bending Moment Kapal Perang Tipe Corvette ... 35
IV.4.1 Shear Force pada Gelombang Reguler ... 37
IV.4.2 Shear Force pada Gelombang Irreguler ... 39
ix
IV.4.4 Bending Moment pada Gelombang Irreguler ... 47
IV.5 Kekuatan Memanjang Kapal ... 52
IV.5.1 Kekuatan Memanjang pada Gelombang Reguler ... 53
IV.5.2 Kekuatan Memanjang pada Gelombang Irreguler... 54
BAB V ... 59
KESIMPULAN ... 59
x
DAFTAR GAMBAR
Gambar II. 1 Kapal Perang Tipe Corvette ... 5
Gambar II. 2 Jenis Gerakan Kapal... 6
Gambar II. 3 Masalah Akibat Gerak Kapal ... 8
Gambar II. 4 Transformasi energi gelombang menjadi energi respon pada gerakan heave .. 10
Gambar II. 5 Moment terhadap sumbu XYZ ... 11
Gambar II. 6 Shear Force ... 14
Gambar III. 1 Model Validasi... 19
Gambar III. 2 Grafik Force Gerakan Surge... 20
Gambar III. 3 Grafik Force Gerakan Sway ... 20
Gambar III. 4 Grafik Force Gerakan Heave ... 20
Gambar III. 5 Grafik Force Gerakan Roll ... 21
Gambar III. 6 Grafik Force Gerakan Pitch ... 21
Gambar III. 7 Grafik Force Gerakan Sway ... 21
Gambar III. 8 Grafik RAO Gerakan Surge ... 22
Gambar III. 9 Grafik RAO Gerakan Sway ... 22
Gambar III. 10 Grafik RAO Gerakan Heave ... 22
Gambar III. 11 Grafik RAO Gerakan Heave ... 23
Gambar III. 12 Grafik RAO Gerakan Heave ... 23
Gambar III. 13 Grafik RAO Gerakan Heave ... 23
Gambar III. 14 Tahap-tahap Untuk Menghitung Beban Gelombang ... 24
Gambar III. 15 Pengaturan Detail Gelombang Irreguler ... 25
Gambar III. 16 Output Setelah Running ... 25
Gambar III. 17 Pengaturan Output Shear Force dan Bending Moment ... 25
Gambar IV. 1 Model Kapal di Program Maxsurf Pro ... 27
Gambar IV. 2 Pengaturan Pembagian Panel ... 28
Gambar IV. 3 Model Messing Kapal di Program Ansys Aqwa ... 28
Gambar IV. 4 Grafik RAO Wave Heading 90˚ ... 29
Gambar IV. 5 Grafik RAO Wave Heading 90˚ ... 29
Gambar IV. 6 Grafik RAO Wave Heading 90˚ ... 30
Gambar IV. 7 Grafik RAO Wave Heading 90˚ ... 30
Gambar IV. 8 Grafik RAO Wave Heading 90˚ ... 30
Gambar IV. 9 Grafik RAO Wave Heading 90˚ ... 31
Gambar IV. 10 Grafik RAO Wave Heading 135˚ ... 31
xi
Gambar IV. 12 Grafik RAO Wave Heading 135˚ ... 32
Gambar IV. 13 Grafik RAO Wave Heading 135˚ ... 32
Gambar IV. 14 Grafik RAO Wave Heading 135˚ ... 32
Gambar IV. 15 Grafik RAO Wave Heading 135˚ ... 33
Gambar IV. 16 Grafik RAO Wave Heading 180˚ ... 33
Gambar IV. 17 Grafik RAO Wave Heading 180˚ ... 33
Gambar IV. 18 Grafik RAO Wave Heading 180˚ ... 34
Gambar IV. 19 Grafik RAO Wave Heading 180˚ ... 34
Gambar IV. 20 Grafik RAO Wave Heading 180˚ ... 34
Gambar IV. 21 Grafik RAO Wave Heading 180˚ ... 35
Gambar IV. 22 Shear Force Global Z Wave Heading 180 ... 37
Gambar IV. 24 Shear Force Maksimal Global X ... 38
Gambar IV. 25 Shear Force Maksimal Global Y ... 38
Gambar IV. 26 Shear Force Maksimal Global Z ... 39
Gambar IV. 27 Shear Force Maksimal Global X Kecepatan 30 knot ... 41
Gambar IV. 28 Shear Force Maksimal Global X Kecepatan 15 knot ... 41
Gambar IV. 29 Shear Force Maksimal Global X Kecepatan 0 knot ... 41
Gambar IV. 30 Shear Force Maksimal Global Y Kecepatan 30 knot ... 42
Gambar IV. 31 Shear Force Maksimal Global Y Kecepatan 15 knot ... 42
Gambar IV. 32 Shear Force Maksimal Global Y Kecepatan 0 knot ... 42
Gambar IV. 33 Shear Force Maksimal Global Z Kecepatan 30 knot ... 43
Gambar IV. 34 Shear Force Maksimal Global Z Kecepatan 15 knot ... 43
Gambar IV. 35 Shear Force Maksimal Global Z Kecepatan 0 knot ... 43
Gambar IV. 23 Bending Moment Global Y Wave Heading 180... 44
Gambar IV. 36 Bending Moment Maksimal Global X ... 45
Gambar IV. 37 Bending Moment Maksimal Global Y ... 45
Gambar IV. 38 Bending Moment Maksimal Global Z Kecepatan 30 knot ... 46
Gambar IV. 39 Bending Moment Maksimal Global X Kecepatan 30 knot ... 48
Gambar IV. 40 Bending Moment Maksimal Global X Kecepatan 15 knot ... 49
Gambar IV. 41 Bending Moment Maksimal Global X Kecepatan 0 knot ... 49
Gambar IV. 42 Bending Moment Maksimal Global Y Kecepatan 30 knot ... 49
Gambar IV. 43 Bending Moment Maksimal Global Y Kecepatan 15 knot ... 50
Gambar IV. 44 Bending Moment Maksimal Global Y Kecepatan 0 knot ... 50
Gambar IV. 45 Bending Moment Maksimal Global Z Kecepatan 30 knot ... 50
Gambar IV. 46 Bending Moment Maksimal Global Z Kecepatan 15 knot ... 51
xii
DAFTAR TABEL
Tabel I. 1 Dimensi Utama Kapal ... 2
Tabel II. 1 Formula RAO ... 10
Tabel III. 1 Dimensi Utama Model Validasi ... 19
Tabel IV. 1 Tabel Dimensi Utama Kapal ... 27
Tabel IV. 2 Perbandingan Cuplikan Nilai Shear Force dan Bending Moment Berdasarkan Jumlah Panel ... 28
Tabel IV. 3 Tabel Sea State ... 36
Tabel IV. 4 Shear Force Maksimal Kecepatan 30 knot ... 37
Tabel IV. 5 Shear Force Maksimal Kecepatan 15 knot ... 37
Tabel IV. 6 Shear Force Maksimal Kecepatan 0 knot ... 38
Tabel IV. 7 Rekapitulasi Shear Force Maksimal Gelombang Irreguler Sea State 4, dan 5 ... 39
Tabel IV. 8 Rekapitulasi Shear Force Maksimal Gelombang Irreguler Sea State 6 dan 7 ... 40
Tabel IV. 9 Bending Moment Maksimal Kecepatan 30 knot ... 44
Tabel IV. 10 Bending Moment Maksimal Kecepatan 15 knot ... 44
Tabel IV. 11 Bending Moment Maksimal Kecepatan 0 knot ... 45
Tabel IV. 12 Rekapitulasi Bending Moment Maksimal Gelombang Irreguler Sea State 4 dan 5 ... 47
Tabel IV. 13 Rekapitulasi Bending Moment Maksimal Gelombang Irreguler Sea State 7 ... 48
Tabel IV. 14 Rekapitulasi Kekuatan Memanjang pada Gelombang Reguler Kecepatan 30 knot ... 53
Tabel IV. 15 Rekapitulasi Kekuatan Memanjang pada Gelombang Reguler Kecepatan 15 knot ... 53
Tabel IV. 16 Rekapitulasi Kekuatan Memanjang pada Gelombang Reguler Kecepatan 0 knot ... 54
Tabel IV. 17 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 30 knot Sea State 4 ... 54
Tabel IV. 18 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 30 knot Sea State 5 ... 55
Tabel IV. 19 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 30 knot Sea State 6 ... 55
Tabel IV. 20 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 30 knot Sea State 7 ... 55
Tabel IV. 21 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 15 knot Sea State 4 ... 56
Tabel IV. 22 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 15 knot Sea State 5 ... 56
Tabel IV. 23 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 15 knot Sea State 6 ... 56
xiii
Tabel IV. 24 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 15 knot Sea State 7 ... 57 Tabel IV. 25 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 0 knot Sea State 4 ... 57 Tabel IV. 26 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 0 knot Sea State 5 ... 57 Tabel IV. 27 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 0 knot Sea State 6 ... 58 Tabel IV. 28 Rekapitulasi Kekuatan Memanjang pada Gelombang Irreguler Kecepatan 0 knot Sea State 7 ... 58
1
BAB I
PENDAHULUAN
I.1
Latar Belakang
Sebagai desainer kapal yang baik haruslah dapat memperkirakan beban-beban yang akan terjadi pada kapal. Banyak beban-beban yang dialami kapal selama berada di perairan, salah satunya adalah beban gelombang. Beban gelombang adalah beban yang ditimbulkan akibat terjadi interaksi antara permukaan badan kapal dengan gelombang laut baik saat diam maupun bergerak. Saat terjadi interaksi struktur pada kapal menerima gaya yang dapat membahayakan kapal apabila melebihi batas kekuatan struktur kapal tersebut. Oleh karena itu perhitungan beban gelombang menjadi penting untuk dilakukan.
Di tugas akhir yang penulis kerjakan ini,penulis tertarik membahas masalah beban gelombang yang terjadi pada kapal perang tipe corvette. Pada tugas akhir sebelumnya yang sekarang sedang dikerjakan oleh “Ismail Syahputra” mahasiswa Jurusan Teknik Perkapalan Intitut Teknologi Sepuluh Nopember Surabaya telah dianalisa tentang motion untuk kapal perang tipe corvette. Struktur kapal perang umumnya memiliki kekuatan yang lebih besar apabila dibandingkan dengan kapal pada umumnya. Dengan menggunakan data-data kapal dari tugas akhir sebelumnya yang juga sedang dikerjakan sekarang, penulis akan menganalisa beban gelombang dari kapal tersebut.
I.2
Rumusan Masalah
Bagaimana respon gerak kapal perang di kondisi perairan indonesia? Beban apa saja yang disebabkan oleh gelombang pada kapal perang? Berapa besar beban gelombang yang dialami oleh kapal perang?
Berapa besar shear force dan bending moment yang dialami oleh kapal?
Dimanakah letak shear force dan bending moment maksimal yang dialami kapal? Berapa besar tegangan yang dialami kapal?
Dimanakah letak tegangan maksimal yang dialami kapal?
Apakah tegangan yang dialami oleh kapal memenuhi persyaratan sesuai dengan yang diijinkan peraturan klasifikasi?
Pada kondisi apa tegangan kapal tidak memenuhi persyaratan yang diijinkan peraturan klasifikasi?
2
I.3
Batasan Masalah
Kapal yang digunakan adalah kapal perang tipe corvette dengan ukuran utama sebagai berikut :
Tabel I. 1 Dimensi Utama Kapal
Item Value Unit
Loa 106,00 m
B 14,00 m
T 3,70 m
H 8,75 m
Vs 30 knot
Karakteristik kapal berdasarkan hidrostatik :
o COG : X = -3. 475 ; Y = -1.96 x 10-3 m ; Y = 3.7 m o COB : X = -3. 475 ; Y = -1.96 x 10-3 m ; Y = 2.26 m o Displasemen = 2344.9155 m3
o Massa = 2403538.4155 kg
o Jarak COG ke COB (BG) = 1.34 m o Kxx = 4.16 ; Kyy = 27.8 ; Kyy = 27.8
o Ixx = 4.15x107 kg.m2; Iyy = 1.98x109 kg.m2; Kzz = 1.98x109 kg.m2
Jenis gerakan pada kapal yang dijadikan parameter yaitu surge, sway, heave, roll, pitch dan yaw.
Variasi kecepatan kapal : 0 knot, 15 knot dan 30 knot Variasi frekuensi : 0.05 rad/s – 2 rad/s
Interval frekuensi : 0.05 rad/s
Wave heading arah gelombang : 90°, 135° dan 180° Additional roll damping : 300 KN
3
I.4
Tujuan
Mengetahui respon gerak kapal perang di kondisi perairan Indonesia. Mengetahui beban-beban yang disebabkan oleh gelombang.
Mengetahui besar beban gelombang pada kapal perang.
Mengetahui besar shear force dan bending moment yang dialami oleh kapal. Mengetahui letak shear force dan bending moment maksimal di kapal. Mengetahui besar tegangan yang dialami oleh kapal.
Mengetahui letak tegangan maksimal yang dialami oleh kapal.
Mengetahui berapa besar tegangan yang diijinkan oleh peraturan klasifikasi.
Mengetahui kondisi perairan yang menyebabkan tegangan kapal tidak sesuai dengan yang diijinkan oleh peraturan klasifikasi.
I.5
Manfaat
Dengan dilakukannya tugas akhir ini diharapkan dapat membantu mendapatkan solusi alternatif dalam melakukan analisa beban gelombang. Melalui tugas akhir ini juga penulis dan pembaca dapat mengetahui bagaimana cara menganalisa beban gelombang secara cepat, tepat dan akurat. Selain itu analisa beban gelombang dengan menggunakan Ansys Aqwa tidak hanya dapat memudahkan melainkan juga dapat mempercepat analisa tetapi tetap secara akurat.
I.6
Hipotesis
Dengan mengerjakan tugas akhir ini dapat diketahui beban gelombang yang terjadi pada konstruksi kapal perang tipe corvette.
Bending moment maksimal ada dibagian midship kapal.
Tegangan pada kapal memenuhi persyaratan berdasarkan perhitungan tegangan yang diijinkan peraturan klasifikasi.
Pada kondisi tertentu tegangan kapal tidak memenuhi persyaratan yang diijinkan peraturan klasifikasi.
4
I.7
Sistematika Penulisn
BAB I Pendahuluan
Pada bagian ini mengulas tentang konsep dasar penyusunan tugas akhir yang terdiri dari latar belakang, rumusan masalah, batasan masalah, tujuan, manfaat, hipotesis dan sistematika penulisan.
BAB II Tinjauan Pustaka
Teori-teori dasar yang digunakan penulis dalam menyusun tugas akhir ini dibahas pada bagian ini secara mendalam. Teori-teori yang digunakan penulis antara lain adalah teori yang berhubungan dengan gerak kapal, perhitungan beban gelombang, dan metode analisa beban-beban pada kapal.
BAB III Metodologi Penelitian
Tahap-tahap untuk mendapatkan hasil analisa beban gelombang yang dialami oleh kapal perang tipe corvette diuraikan secara detail pada bagian ini.
BAB IV Hasil Perhitungan dan Pembahasan
Pada tahap ini penulis menguraikan hasil-hasil perhitungan dari program yang digunakan berikut dengan pembahasannya.
BAB V Kesimpulan
5
BAB II
TINJAUN PUSTAKA
II.1
Tinjauan Umum Kapal Perang
Kapal perang adalah kapal yang dibangun dengan tujuan menjadi alat pertempuran. Kapal perang dirancang lebih tahan terhadap kerusakan dan biasanya lebih cepat dibandingkan dengan kapal-kapal lainnya. Tidak seperti kapal-kapal niaga yang membawa muatan yang bersifat komersil, kapal-kapal perang hanya membawa senjata, amunisi dan persediaan untuk awak kapalnya. Kapal perang biasanya dimiliki oleh angkatan laut, meskipun juga telah dioperasikan oleh individu atau perusahaan.
Kapal perang modern umumnya terbagi menjadi 7 kategori pokok, yaitu aircraft carriers, cruisers, destroyers, frigates, corvettes, submarines dan amphibious assault.
Corvettes adalah kapal perang yang bersenjata ringan dan umumnya lebih kecil daripada frigates. Namun, akhir-akhir ini banyak desain corvettes menyerupai frigates.
6
II.2
Gerak Kapal
Pada umumnya kapal mengalami 2 jenis gerakan yaitu gerakan translasi dan rotasi. Karena kapal merupakan benda 3 dimensi masing-masing jenis gerakan bergerak terhadap 3 sumbu yaitu sumbu x, y, dan z. Gerakan translasi yang dialami kapal antara lain gerakan vertikal naik turun (heave) searah sumbu z, gerakan ke kiri dan ke kanan (sway) searah sumbu y dan gerakan ke arah depan dan belakang (surge) searah sumbu x. Gerakan rotasi yang dialami kapal antara lain rotasi terhadap sumbu x (roll), rotasi terhadap sumbu y (pitch), dan rotasi terhadap sumbu z (yaw). Jadi, berdasarkan uraian tersebut kapal mengalami 6 macam gerakan saat mendapat gaya dari gelombang saat berada di air laut maupun air tawar.
Gambar II. 2 Jenis Gerakan Kapal
Di dalam mendesain kapal perlu dilakukan perkiraan awal tentang perilaku dari struktur kapal atau struktur apung lainnya bila terkena gelombang. Hal ini dapat diketahui dengan cara dihitung melalui pengujian. Perhitungan dapat dilakukan secara analitis untuk bentuk sederhana seperti kapal tongkang yang berbentuk persegi panjang, tetapi untuk kapal yang realistis harus digunakan program komputer. Hasil dari beberapa perhitungan atau uji model berupa fungsi transfer yang disebut Response Amplitude Operator (RAO). Untuk struktur terapung diperlukan perhitungan yang meliputi 6 macam gerakan utama untuk semua wave heading relatif gelombang.
Gerakan kapal perlu diketahui guna menentukan beban dinamis pada kru, penumpang, komponen sistem pada kapal, ruang muat, dan elemen struktur lainnya. Gerakan kapal yang berlebihan dapat menghambat performa kapal.
Gerakan kapal memiliki efek fisiologis pada penumpang kapal dan kru. Besaran dan percepatan gerakan kapal, (terutama heave, roll dan pitch) memiliki efek buruk pada penumpang kapal dan kru seperti mabuk laut. Mabuk laut akan berefekburuk pada kemampuan kru untuk menyelesaikan tugas dan memelihara kewaspadaan dan tentu saja itu akan berbahaya bagi penumpang. Parameter dalam mengevaluasi penyakit laut adalahMotion Sickness Incidence (MSI). Penelitian yang paling penting
7 pada MSI diterbitkan dalam Aerospace Medicine oleh O'Hanlon dan McCauley pada tahun 1974, yang menetapkan ambang batas subjektif umum toleransi MSI. MSI diukur dalam persentase orang yang mengalami penyakit laut selama jumlah waktu tertentu. Batas yang diterima secara umum MSI adalah kejadian 20% dari penyakit laut selama 4 jam.
Gerak secara langsung berdampak pada desain kapal. Gerakan kapal harus dipertimbangkan saat menentukan ukuran utama kapal dan dalam pengaturan ruang-ruang yang ada di kapal. Dalam suatu kasus biasanyasaat gerakan kapal menimbulkan ancaman bagi kru, struktur atau mesin, atau ketika gerakan kapal mengganggu kemampuan kapal untuk mencapai misinya, maka desain harus dimodifikasi sehingga gerakan kapal berkurang.
II.3
Pengaruh Gerak Kapal dan Beban Gelomabang
Setiap gerakan pada kapal yang disebabkan oleh beban gelombang menimbulkan interaksi antara kapal dan gelombang yang dapat menyebabkan bahaya. Berbagai macam interaksi yang ditimbulkan antara lain benturan dan tekanan. Benturan dan tekanan dapat memunculkan efek negatif pada kapal salah satunya lengkungan. Akan ada efek negatif pada kapal apabila lengkungan yang ditimbulkan terlalu besar, bahkan pada suatu kondisi yang sangat ekstrem kapal dapat patah.
Pada suatu kondisi tertentu, akselerasi dan gerakan relatif secara vertikal antara kapal dan gelombang adalah response yang terpenting. Akselerasi menentukan besar beban pada kargo dan peralatan dan merupakan alasan utama yang membuat mabuk laut. Gerak relatif kapal secara vertikal dapat digunakan untuk mengevaluasi kemungkinan dan bahaya selama terjadi slamming. Slamming adalah benturan yang terjadi antara kapal dan gelombang. Sangat penting untuk suatu kapal dapat menangkal masuknya air ke geladak pada saat slamming karena akan berakibat buruk pada struktur kapal tersebut.
Rolling merupakan gerakan yang paling sering menimbulkan bahaya untuk kapal-kapal berukuran kecil. Sehingga upaya untuk mengurangi gerakan rolling banyak diaplikasikan pada kapal kecil. Pada kapal kecil rolling merupakan kombinasi antara angin, air di atas geladak, gerakan muatan di kapal dapat menyebabkan kapal terbalik. Selain itu ombak yang terpecah juga dapat menyebabkan kapal terbalik. Beberapa kecelakaan kapal terbalik di Norwegia di sebabkan oleh pecahan ombak.
Untuk kapal-kapal berukuran momen lengkung dan gaya geser merupaka masalah penting. Masalah yang lebih spesifiknya adalah whipping dan springing. Whipping adalah getaran elastis sementara yang terjadi pada lambung kapal akibat terjadi slamming. Sedangkan springing adalah getaran elastis pada kondisi diam yang diakibatkan oleh gelombang.
8 Gerakan kapal dan beban gelombang dapat mempengaruhi baik sengaja ataupun tidak sengaja dalam mengurangi kecepatan. Berkurangnya kecepatan secara sengaja dapat diartikan bahwa pengemudi kapal mengurangi kecepatan karena terjadi slamming yang parah, air di atas geladak dan akselerasi yang besar. Sedangkan secara tidak langsung adalah berkurangnya kecepatan pada kapal karena penambahan hambatan yang disebabkan oleh gelombang dan angin serta perubahan efisiensi pada propepeller akibat gelombang.
Gambar II. 3 Masalah Akibat Gerak Kapal
II.4
Spektrum Gelombang
II.4.1 Spektrum Pierson-Moskowitz
Dalam formula spektrum Pierson-Moskowitz (1964) diasumsikan angin berhembus konstan dalam jangka waktu yang lama, gelombang dianggap dapat mencapai kondisi setimbang dengan angin. Lama waktu yang dimaksud Pierson-Moskowitz adalah sepuluh ribu periode gelombang dengan daerahnya sepanjang lima ribu panjang gelombang.
Pengukuran dilakukan dengan accelerometer yang dipasang di kapal peneliti cuaca milik Inggris di daerah Atlantik Utara. Dari pengukuran tersebut maka dirumuskan spektrum gelombangnya sebagai berikut :
9 𝑆(𝜔) =𝛼𝑔2 𝜔5 𝑒𝑥𝑝 [−𝛽 ( 𝜔0 𝜔) 4 ] (1) α : 8,1 x 10-3
ω0 : g/U19.5, U19.5 adalah kecepatan angin pada ketinggian 19.5 meter. II.4.2 Spektrum JONSWAP
JONSWAP (Joint North Sea Wave Project) merupakan penelitian mengenai pengukuran gelombang di daerah North Sea hingga Pulau Sylt sepanjang 100 mil. Formula spektrum gelombang JONSWAP adalah sebagai berikut :
𝑆(𝜔) = 𝛼𝑔2𝜔−5𝑒𝑥𝑝 [−125 (𝜔 𝜔0) −4 ] 𝛾𝑒𝑥𝑝[ −(𝜔−𝜔0)2 2𝜏2𝜔02 ] (2) α : 0.0081 (Konstanta Philips)
τ : 0.07 jika ω < ω0 dan 0.09 jika sebaliknya γ : 3.3
Gambar II. 4 Spektrum Gelombang
II.5
Gerakan Struktur pada Gelombang Beraturan
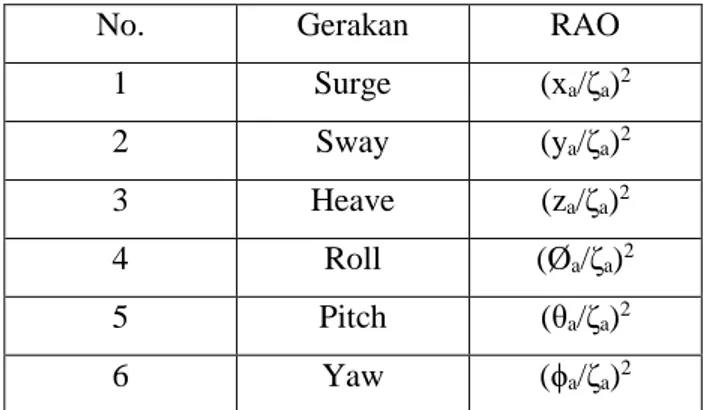
Response Amplitude Operator (RAO) juga disebut sebagai gerakan suatu struktur pada gelombang reguler. RAO adalah fungsi dari amplitudo gerakan struktur terhadap amplitudo gelombang. Banyak cara untuk mengetahui RAO, mulai dari tes menggunakan model di towing tank, pendekatan numerik maupun analitis baik secara manual ataupun menggunakan program tertentu. Secara matematis persamaan RAO dapat dituliskan seperti ini :
10
No. Gerakan RAO
1 Surge (xa/ζa)2 2 Sway (ya/ζa)2 3 Heave (za/ζa)2 4 Roll (Øa/ζa)2 5 Pitch (θa/ζa)2 6 Yaw (ϕa/ζa)2
Tabel II. 1 Formula RAO
II.6
Gerakan Struktur pada Gelombang Tak Beraturan
Gelombang tak beraturan adalah gabungan dari beberapa gelombang beraturan yang dijumlahkan yang masing-masing memiliki frekuensi, tinggi, dan fase gelombang yang berbeda. Dengan mengalikan RAO dengan spektrum gelombang pada gelombang tak beraturan maka akan didapatkan response dari struktur. Spektrum gelombang (ω) sebelumnya harus diubah terlebih dahulu menjadi spektrum encountered (ωe). Secara matematis dapat ditulis sebagai berikut :
𝜔𝑒= 𝜔 − 𝜔2
𝑔 𝑉 ∙ 𝑐𝑜𝑠𝜇 (3)
Perkalian antara spektrum gelombang dan RAO menghasilkan spektrum respon.
Momen gerakan tersebut adalah:
𝑚𝑛𝑟 = ∫ 𝜔𝑒𝑛∙ 𝑆𝑟(𝜔𝑒) ∙ 𝑑𝜔𝑒 ∞
0 (4)
n =0, 1, 2, …
11
Amplitude signifikan gerakan dapat dihitung dengan formula berikut:
𝑟𝑎1/3 = 2√𝑚0𝑟 = 2 ∙ 𝑅𝑀𝑆 (5)
Sedangkan periode gerakannya adalah: 𝑇1𝑟 = 2𝜋 ∙
𝑚0𝑟
𝑚1𝑟 (6)
II.7
Beban Hidrostatik
Ketika suatu struktur berada di air, bagian struktur yang tercelup akan mengalami tekanan dari beban hidrostatik. Beban hidrostatik (p) terjadi secara tegak lurus terhadap permukaan dengan besar
p = -ρ.g.Z (7)
ρ adalah massa jenis dari air, g adalah percepatan gravitasi dan Z adalah koordinat vertikal secara global sistem koordinat XYZ. Total dari vektor gaya hidrostatik 𝐹 = (Fx, Fy, Fz) pada struktur dapat
diintegrasikan dari beban p pada bagian yang tercelup S:
𝐹 = − ∬ 𝑝 𝑛 𝑑𝑆𝑆 (8)
Gambar II. 6 Moment terhadap sumbu XYZ
Vektor moment 𝑀 = (Mx, My, Mz) yang disebabkan oleh beban hidrostatik :
𝑀𝑋 = − ∬ 𝑝 (𝑛𝑆 𝑍 𝑌 − 𝑛𝑌 𝑍) 𝑑𝑆 (9)
𝑀𝑌= − ∬ 𝑝 (𝑛𝑆 𝑋 𝑍 − 𝑛𝑍 𝑋) 𝑑𝑆 (10)
12 Kesetimbangan statis berlaku bahwa 𝑀 dan 𝐹 berlawanan dengan gaya-gaya statis lainnya :
𝐹 = −𝐹𝑟 (12)
𝑀 = −𝑀𝑟 (13)
Fr dan Mr adalah total dari gaya-gaya statis lainnya.
Sebuah bentuk kaku diasumsikan dapat menghasilkan gerak secara translasi dan rotasi berdasarkan sumbu XYZ. Dengan menggunakan persamaan gaya dan momen sudah cukup untuk menentukan posisi dari sebuah struktur di air tenang. Untuk bentuk yang sangat elastis seperti subsea membrane perubahan bentuk sangat mempengaruhi perubahan pada beban hidrostatik. Pada beberapa kasus, kondisi kesetimbangan hanya dapat ditentukan dengan menyelesaikan semua beban-beban luar (tekanan hidrostatik, gaya gravitasi, gaya-gaya reaksi) pada struktur elastis yang kompleks. Dikarenakan terjadi deformasi yang ekstrem hingga menimbulkan banyak persoalan non-linear membuat bentuk yang sangat elastis susah untuk diselesaikan.
Namun, pada kapal dan kebanyakan struktur kelautan lainnya mempunyai bentuk yang cukup kaku sehingga deformasi yang disebabkan beban hidrostatik tidak menyebabkan perubahan pada beban hidrostatik yang dialami untuk berbagai wave heading yang signifikan.
Untuk struktur terapung dengan bagian yang tercelup di dalam air, resultan beban hidrostatik dapat ditulis dalam bentuk lain dari teori integral Gauss
∬ 𝑣. 𝑛 𝑑𝑆𝑆0 0 = ∬ 𝑑𝑖𝑣 𝑣 𝑑∇∇ (14) 𝑣. 𝑛 = 𝑣𝑋𝑛𝑋+ 𝑣𝑌𝑛𝑌+ 𝑣𝑍𝑛𝑍 (15) 𝑑𝑖𝑣𝑣 = 𝜕𝑣𝑋 𝜕𝑋 + 𝜕𝑣𝑌 𝜕𝑌 + 𝜕𝑣𝑍 𝜕𝑍 (16)
Sehingga didapatkan persamaan,
𝐹𝑋 = ∬ 𝑍𝑛𝑆0 𝑋𝑑𝑆0= 0 (17) 𝐹Y= ∬ 𝑍𝑛𝑆 Y𝑑𝑆0 0 = 0 (18) 𝐹𝑍 = ∬ 𝑍𝑛𝑆 𝑍𝑑𝑆0 0 = ρg∇ (19) 𝑀𝑋 = 𝜌𝑔 ∬ 𝑍(𝑛𝑆 𝑍𝑌 − 𝑛𝑌𝑍) 𝑑𝑆0 0 = 𝜌𝑔 ∭ 𝑌 𝑑∇∇ (20) 𝑀𝑌= 𝜌𝑔 ∬ 𝑍(𝑛𝑆0 𝑋𝑍 − 𝑛𝑍𝑋) 𝑑𝑆0= −𝜌𝑔 ∭ 𝑋 𝑑∇∇ (21) 𝑀𝑍 = 𝜌𝑔 ∬ 𝑍(𝑛𝑆 𝑌𝑋 − 𝑛𝑋𝑌) 𝑑𝑆0 0 = 0 (22)
13
II.8
Beban Gelombang pada Kapal
II.8.1 Froude-Krylove Force
Froude-Krylove Force adalah gaya pada permukaan badan kapal yang disebabkan oleh gelombang regular. Gaya ini terjadi bersamaan dengan diffraction force.
Persamaan untuk Froude-Krylove Force adalah sebagai berikut : 𝐹𝐹𝐾
⃗⃗⃗⃗⃗⃗⃗ = − ∬ 𝑝𝑛⃗ 𝑑𝑠𝑆𝜔 (23)
II.8.2 Added Mass
Added mass adalah massa tambahan pada kapal karena adanya perubahan permukaan badan kapal yang tercelup dikarenakan gerakan kapal.
Dalam persamaan matematis added mass secara umum dalam 6 derajat kebebasan dapat ditulis sebagai berikut : 𝑚𝑗𝑖= 𝜌 ∬ Φ𝐵 𝑖𝑛𝑗𝑑𝑆 (24) 𝑚𝑗𝑖= 𝜌 ∬ Φ𝑖 𝜕Φ𝑗 𝜕𝑛 𝑑𝑆 𝐵 (25)
Simetri dari matriks added mass adalah mji = mij
𝑚𝑗𝑖= 𝜌 ∬ Φ𝑖 𝜕Φ𝑗 𝜕𝑛 𝑑𝑆 𝐵 (26) 𝑚𝑗𝑖= 𝜌 ∬ Φ𝐵 𝑖(∇Φ𝑖∙ 𝑛̂)𝑑𝑆 (27) 𝑚𝑗𝑖= 𝜌 ∭ ∇ ∙𝑉 (Φ𝑖∇Φ𝑗)𝑑𝑉 (28) 𝑚𝑗𝑖= 𝜌 ∭ (∇Φ𝑉 𝑖∙ ∇Φ𝑗+ Φ𝑖∇2Φ𝑗)𝑑𝑉 (29) Sehingga menjadi, 𝑚𝑗𝑖= 𝜌 ∭ ∇Φ𝑉 𝑖∙ ∇Φ𝑗𝑑𝑉= 𝑚𝑖𝑗 (30)
14 II.8.3 Shear Force
Shear force adalah gaya yang dialami suatu struktur sehingga menyebabkan terjadi pergeseran secara translasi pada struktur tersebut.
Shear force di titik tertentu sepanjang kapal dapat diperoleh dari data hidrostatik (kurva Bonjean) dan distribusi berat sepanjang kapal adalah sebagai berikut :
𝑉𝑥= ∫ 𝑊 𝑑𝑥 = ∫ 𝑤 𝑑𝑥 − ∫ 𝑏 𝑑𝑧 𝑥 0 𝑥 0 𝑥 0 (31)
Vx = shear force pada jarak x dari bow atau stern W = berat per satuan panjang
b = bouyancy per satuan panjang W = w – b beban per satuan panjang
Gambar II. 7 Shear Force
II.8.4 Bending Moment
Beban-beban yang terjadi sepanjang kapal meliputi hambatan kapal, dan bending moment. Banyak cara untung menentukan besar dari beban tersebut, tetapi cara yang paling sering dipakai adalah cara-cara empiris yang berdasarkan dari pengalaman.
Bending moment yang terjadi pada kapal terdiri dari 3 jenis :
1. Vertikal bending moment (sumbu y) 2. Horizontal bending moment (sumbu x) 3. Tranverse bending moment (sumbu z)
Beban-beban dipengaruhi oleh gaya gravitasi, tekanan fluida, inersia yang berdasarkan gerakan elastic dan kaku pada kapal. Tekanan fluida berefek kepada lambung kapal utamanya pada geladak dan alas kapal. Tekanan ini biasanya memiliki terbesar pada bagian midship, lalu mulai menurun nilainya dengan cepat hingga mencapai nol pada ujung-ujung kapal. Maka dari itu bisa
15 disimpulkan bagian midship pada kapal ada bagian terpenting untuk diperhatikan. Fenomena ini disebut juga bending moment.
Ada 2 macam kondisi ekstrem pada bending moment yaitu sagging dan hogging. Sagging adalah kondisi beban gelombang terpusat pada ujung-ujung kapal, sedangkan hogging adalah kondisi beban gelombang terpusat pada bagian midship kapal.
Ada 2 macam bending moment yang terjadi, yang pertama bending moment pada air tenang (Ms), yang kedua adalah bending moment yang disebabkan oleh perbedaan distribusi displacement sepanjang kapal (Mw). Jadi bending moment total dapat dijadikan persamaan sebagai berikut:
M = Ms + Mw (32)
Mw merupakan gabungan dari beberapa macam moment, antara lain Mζ yaitu momen yang dihasilkan oleh jenis gelombang. Mz yaitu momen yang dihasilkan oleh gerakan heaving. Mθ yaitu momen yang dihasilkan dari gerakan pitching.
Mw = Mζ + Mz + Mθ (33)
Bending moment still water yang terjadi pada suatu titik pada kapal dapat djelaskan dengan persamaan sebagai berikut:
𝑀𝑥 = ∬ 𝑊𝑑𝑥𝑑𝑥 𝑥𝑥 00 = ∬ 𝑤𝑑𝑥𝑑𝑥 − ∬ 𝑏𝑑𝑥𝑑𝑥 𝑥𝑥 00 𝑥𝑥 00 (34)
Bending moment yang disebabkan oleh gelombang (Mw) yang terjadi pada bagian mid dapat didefinisikan sebagai fungsi waktu sebagai berikut
Mw = (Mw)acos(ωet + β) (35)
Bending moment ini pada akhirnya menimbulkan tegangan pada konstruksi kapal yang dapat menyebabkan pada kerusakan konstruksi kapal. Kerusakan dapat timbul apabila tegangan yang dialami melebihi ambang batas yang mampu dialami oleh kapal. Batasan tegangan yang diijinkan pada suatu kapal telah diatur didalam klasifikasi.
16
II.9
Tegangan
Tegangan pada kapal disebabkan oleh beban yang bekerja pada kapal sehingga terjadi bending moment. Tiap-tiap klasifikasi telah menentukan tegangan yang diijinkan pada kapal. Beberapa dari peraturan klasifikasi memiliki formula yang sama dalam menentukan tegangan ijin, misalnya Germanyscher’s Lloyd, Biro Klasifikasi Indonesia, Lloyd’s Register. Adapun formula tegangan ijin yang dipakai adalah sebagai berikut :
Untuk di daerah 0,4 L 𝜎 =175 𝑘𝐿 (36) Diluar daerah 0,4 L 𝜎 = (75 + 543𝑥𝐿− 699 (𝑥𝐿)2)𝑘1 𝐿 (37)
Selain menentukan tegangan yang diijinkan pada kapal, peratutan klasifikasi juga memiliki formulanya tersendiri dalam menentukan tegangan yang terjadi pada kapal.
𝜎𝐷= | 𝑀𝑠 ̅̅̅̅+𝑀𝑤 𝑍𝐷 | ∙ 10 −3 (38) 𝜎𝐵 = | 𝑀𝑠 ̅̅̅̅+𝑀𝑤 𝑍𝐵 | ∙ 10 −3 (39)
σD = tegangan pada geladak σB = tegangan pada alas
Di dalam buku Dynamics of Marine Vehicles tegangan pada kapal ditampilkan dalam bentuk persamaan sebagai berikut :
𝜎 = √(𝑀𝑦𝑧 𝐼𝑦 ) 2 + (𝑀𝐻𝑦 𝐼𝐻 ) 2 (40)
II.10
Ansys Aqwa
Teknologi di dunia perkapalan semakin canggih seiring dengan perkembang perangkat-perangkat lunak yang dapat mempermudah pekerjaan dalam mendesain kapal. Dengan menggunakan program-program tertentu perhitungan yang rumit dapat dipersingkat dengan menggunakan komputer sehingga dalam menentukan variasi perhitungan menjadi lebih mudah.
Dalam melakukan analisa beban gelombang metode yang sering digunakan sebelumnya adalah metode eksperimen di towing tank. Namun metode ini membutuhkan biaya dan waktu yang tidak sedikit. Kini analisa tersebut dapat dilakukan dengan menggunakan program yang dioperasikan melalui
17 komputer. Hal ini tentu saja mempermudah dan mempersingkat waktu dalam menganalisa serta biaya yang dikeluarkan dapat diminimalisir. Salah satu program yang dapat digunakan melakukan analisa beban gelombang adalah Ansys Aqwa.
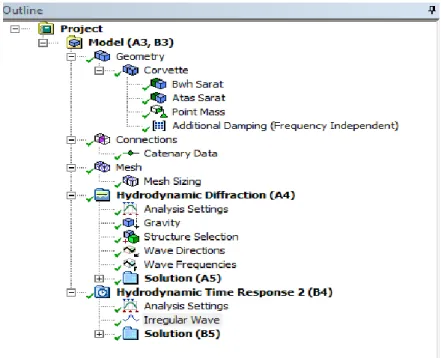
Untuk melakukan analisa dengan menggunakan Ansys Aqwa terlebih dahulu dilakukan permodelan dengan menggunakan program pendukung Aqwa seperti Design Modeler atau bisa juga dengan program lain seperti Maxsurf. Model yang dapat dianalisa Aqwa adalah model yang berbentuk nurb surface.
18
BAB III
METODE PENELITIAN
III.1
Diagram Alir
Studi Literatur :
Beban gelombang Ansys Aqwa Validasi
Permodelan kapal di Maxsurf Pro dengan dimensi : Loa = 106 ; B = 14 ; T = 3,7 ; H = 8,75
Meng-export model kapal dari Maxsurf Pro ke Ansys Aqwa dengan format *.IGES untuk dibagi menjadi panel-panel
Berhasil?
Melakukan perhitungan dan analisa beban gelombang dengan media Ansys Aqwa
Analisa Data
Kesimpulan
SELESAI
TIDAK
19
III.2
Studi Literatur
III.2.1 Beban Gelombang
Pemahaman teori mengenai beban gelombang dilakukan melalui mencari dan membaca buku-buku, paper dan catatan-catatan yang membahas mengenai beban gelombang.
III.2.2 Ansys Aqwa
Agar dapat menguasai program Ansys Aqwa yang dipakai maka dilakukan pembelajaran mengenai cara kerjanya. Penulis menggunakan buku yang berisikan tutorial dalam menggunakan Ansys Aqwa.
III.2.3 Validasi
Validasi dilakukan untuk mengetahui kevalidan data yang dihasilkan program Ansys Aqwa yang digunakan oleh penulis.
Metode validasi yang digunakan penulis yaitu dengan membandingkan data penelitian yang sudah pernah dilakukan dengan data hasil program Ansys Aqwa dengan model dan parameter yang sama. Paper yang digunakan penulis sebagai referensi adalahWAMIT-MOSES Hydrodynamic Analysis Comparison Study. Data yang dipakai sebagai perbandingan adalah hasil dari program WAMIT.
Di dalam paper WAMIT-MOSES Hydrodynamic Analysis Comparison Study menggunakan beberapa model antara lain box, cylinder, general ship, TLP, dan semi-sumbersible. Di dalam mengerjakan tugas akhir ini model yang digunakan penulis sebagai acuan validasi adalah box dengan dimensi sebagai berikut :
Tabel III. 1 Dimensi Utama Model Validasi
Model L (m) B (m) T (m) Displacement (ton) Wave Heading(˚) KG(m) BOX 200 40 28 229645 45 28
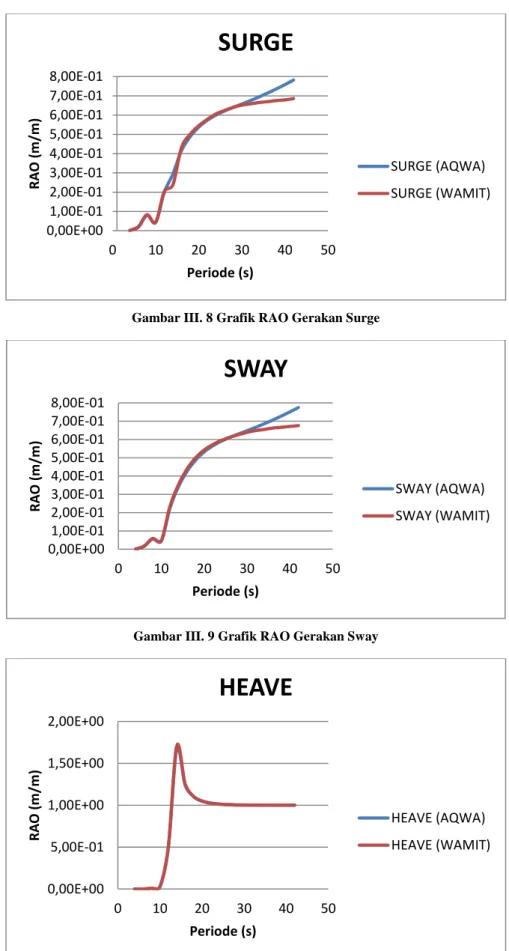
20 Setelah dilakukan perbandingan dapat diambil kesimpulan bahwa data yang dihasilkan program Ansys Aqwa valid. Berikut adalah hasil perbandingan antara WAMIT dan Ansys Aqwa :
Gambar III. 2 Grafik Force Gerakan Surge
Gambar III. 3 Grafik Force Gerakan Sway
Gambar III. 4 Grafik Force Gerakan Heave
0,00E+00 2,00E+02 4,00E+02 6,00E+02 8,00E+02 1,00E+03 1,20E+03 1,40E+03 1,60E+03 1,80E+03 2,00E+03 0 10 20 30 40 50 Fr o u d e K ry lo ve Fr o ce (t o n ) Periode (s)
SURGE
SURGE (AQWA) SURGE (WAMIT) 0,00E+00 1,00E+03 2,00E+03 3,00E+03 4,00E+03 5,00E+03 6,00E+03 0 10 20 30 40 50 Fr o u d e K ry lo ve Fo rc e (t o n ) Periode (s)SWAY
SWAY (AQWA) SWAY (WAMIT) 0,00E+00 2,00E+03 4,00E+03 6,00E+03 8,00E+03 0 10 20 30 40 50 Fr o u d e K ry lo ve Fo rc e (t o n ) Periode (s)HEAVE
HEAVE (AQWA) HEAVE (WAMIT)21
Gambar III. 5 Grafik Force Gerakan Roll
Gambar III. 6 Grafik Force Gerakan Pitch
Gambar III. 7 Grafik Force Gerakan Sway
0,00E+00 1,00E+04 2,00E+04 3,00E+04 4,00E+04 5,00E+04 6,00E+04 0 10 20 30 40 50 Fr o u d e K ry lo ve Fo rc e (t o n ) Periode (s)
ROLL
ROLL (AQWA) ROLL (WAMIT) 0,00E+00 2,00E+04 4,00E+04 6,00E+04 8,00E+04 1,00E+05 1,20E+05 0 10 20 30 40 50 Fr o u d e K ry lo ve Fo rc e (t o n ) Periode (s)PITCH
PITCH (AQWA) PITCH (WAMIT) 0,00E+00 5,00E+04 1,00E+05 1,50E+05 2,00E+05 2,50E+05 3,00E+05 3,50E+05 4,00E+05 0 10 20 30 40 50 Fr o u d e K ry lo ve Fo rc e (t o n ) Periode (s)YAW
YAW (AQWA) YAW (WAMIT)22
Gambar III. 8 Grafik RAO Gerakan Surge
Gambar III. 9 Grafik RAO Gerakan Sway
Gambar III. 10 Grafik RAO Gerakan Heave
0,00E+00 1,00E-01 2,00E-01 3,00E-01 4,00E-01 5,00E-01 6,00E-01 7,00E-01 8,00E-01 0 10 20 30 40 50 R A O (m /m ) Periode (s)
SURGE
SURGE (AQWA) SURGE (WAMIT) 0,00E+00 1,00E-01 2,00E-01 3,00E-01 4,00E-01 5,00E-01 6,00E-01 7,00E-01 8,00E-01 0 10 20 30 40 50 R A O (m /m ) Periode (s)SWAY
SWAY (AQWA) SWAY (WAMIT) 0,00E+00 5,00E-01 1,00E+00 1,50E+00 2,00E+00 0 10 20 30 40 50 R A O (m /m ) Periode (s)HEAVE
HEAVE (AQWA) HEAVE (WAMIT)23
Gambar III. 11 Grafik RAO Gerakan Heave
Gambar III. 12 Grafik RAO Gerakan Heave
Gambar III. 13 Grafik RAO Gerakan Heave
0,00E+00 5,00E-02 1,00E-01 1,50E-01 2,00E-01 2,50E-01 3,00E-01 0 10 20 30 40 50 R A O (˚ /m ) Periode (s)
ROLL
ROLL (AQWA) ROLL (WAMIT) 0,00E+00 5,00E-01 1,00E+00 1,50E+00 2,00E+00 2,50E+00 0 10 20 30 40 50 R A O (˚ /m ) Periode (s)PITCH
PITCH (AQWA) PITCH (WAMIT) 0,00E+00 1,00E-01 2,00E-01 3,00E-01 4,00E-01 5,00E-01 0 10 20 30 40 50 R A O (˚ /m ) Periode (s)YAW
YAW (AQWA) YAW (WAMIT)24 Dapat dilihat dari hasil grafik perbandingan hasil RAO antara program WAMIT dan Ansys Aqw, nilai RAO pada gerakan roll dari program Ansys Aqwa cenderung memiliki nilai yang lebih besar. Untuk mendapatkan nilai yang relatif sama antara RAO gerakan roll dari hasil rogram WAMITS dengan hasil dari Ansys Aqwa maka perlu ada damping tambahan pada saat melakukan perhitungan menggunakan Ansys Aqwa. Besar damping maksimal yang ditambahkan pada adalah 50 persen dari nilai damping model yang dianalisa.
III.3
Permodelan Kapal di Program Maxsurf Pro
Pada tahapan ini kapal yang akan dianalisa dimodelkan kedalam program Maxsurf Pro dengan skala 1:1. Koordinat model kapal di program Maxsurf Pro disesuaikan dengan koordinat yang ada berdasarkan gambar dari AutoCAD.
III.4
Permodelan Panel-panel Kapal di Program Ansys Aqwa
Setelah melakukan permodelan dengan menggunakan Maxsurf Pro, kapal diexport ke program Ansys Aqwa untuk dibagi menjadi panel-panel.
III.5
Perhitungan Beban Gelombang di Program Ansys Aqwa
Perhitungan beban gelombang yang merupakan inti dari topik yang diangkat dalam tugas akhir ini dilakukan setelah proses pembagian menjadi panel-panel selesai. Perhitungan beban gelombang juga menggunakan program Ansys Aqwa sebagai medianya. Adapun beban gelombang yang dihitung antara lain adalah shear force dan bending moment.
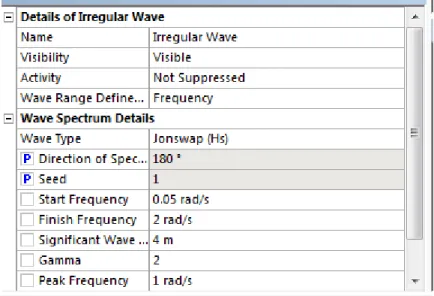
25 Pada saat akan menghitung beban gelombang pada gelombang irreguler harus ditentukan jenis spektrum gelombang yang akan dipakai beserta frekuensi dan tinggi gelombang signifikannya. Selain itu juga harus ditentukan wave headingnya.
Gambar III. 15 Pengaturan Detail Gelombang Irreguler
Setelah semua pengaturan sesuai dengan parameter dan variasi yang dipakai oleh penulis maka program dirunning yang kemudian dapat dilihat hasilnya pada bagian “Solution”.
Gambar III. 16 Output Setelah Running
26
III.6
Analisa Data
Dari hasil perhitungan beban gelombang sebelumnya akan didapatkan besar shear force dan bending moment tiap-tiap variasi. Tiap-tiap variasi tersebut akan dibandingkan untuk melihat perbedaan yang terjadi. Selain itu pada tahap ini dilakukan perhitungan kekuatan memanjang kapal berdasarkan dari hasil perhitungan bending moment tersebut. Perhitungan kekuatan memanjang dilakukan untuk mengetahui kekuatan konstruksi kapal yang diuji. Acuan yang dipakai penulis sebagai pembanding kekuatan memanjang kapal dengan kekuatan memanjang maksimal yang diijinkan adalah peraturan klasifikasi dari LR.
III.7
Membuat Kesimpulan
Setelah selesai menganalisa hasil perhitungan maka penulis akan membuat kesimpulan dari tugas akhir ini. Kesimpulan yang dibuat akan mengacu kepada hipotesis penulis sebelumnya.
27
BAB IV
HASIL PERHITUNGAN DAN PEMBAHASAN
IV.1
Hasil Permodelan Kapal Perang Tipe Corvette di Maxsurf Pro
Dalam melakukan permodelan kapal perang yang akan digunakan sebagai model analisis penulis menggunakan program Maxsurf Pro. Model dibuat menjadi bentuk tiga dimensi sesuai dengan gambar yang telah ada.
Tabel IV. 1 Tabel Dimensi Utama Kapal
Item Value Unit
Loa 106,00 m
B 14,00 m
T 3,70 m
H 8,75 m
Hasil permodelan di program Maxsurf Pro dapat dilihat dibawah ini :
Gambar IV. 1 Model Kapal di Program Maxsurf Pro
IV.2
Hasil Meshing Kapal Perang Tipe Corvette di Program Ansys Aqwa
Untuk melakukan analisa dengan menggunakan program Ansys Aqwa model kapal harus dibagi menjadi panel-panel terlebih dahulu. Proses pembagian panel-panel pada kapal merupakan bagian dari tahap-tahap yang ada di program Ansys Aqwa. Dalam membagi panel-panel pada kapal ktia dapat menentukan ukuran panel tersebut. Ukuran panel harusnya sesuai dengan frekuensi gelombang maksimal yang akan dijadikan parameter analisa.
28
Gambar IV. 2 Pengaturan Pembagian Panel
Di bawah ini merupakan hasil dari pembagian panel-panel pada kapal dengan menggunakan program Ansys Aqwa :
Gambar IV. 3 Model Messing Kapal di Program Ansys Aqwa
Tabel IV. 2 Perbandingan Cuplikan Nilai Shear Force dan Bending Moment Berdasarkan Jumlah Panel
Jumlah Panel Ukuran Panel (m) Shear Force (N) Bending Moment (N.m)
1176 2.57 8,71E+06 3,31E+08
1998 2.00 8,71E+06 3,31E+08
3554 1.50 8,71E+06 3,31E+08
Dari perbandingan hasil perhitungan berdasarkan jumlah panel terlihat bahwa tidak ada perbedaan besar nilai yang cukup signifikan. Namun pada prakteknya dengan jumlah panel yang lebih sedikit, proses perhitungan menjadi jauh lebih cepat. Oleh karena itu penulis memilih jumlah panel yang paling sedikit yaitu 1176 panel.
29
IV.3
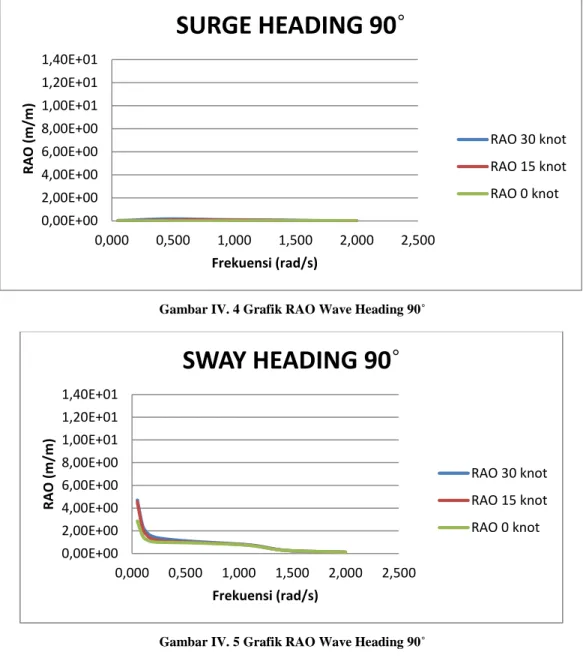
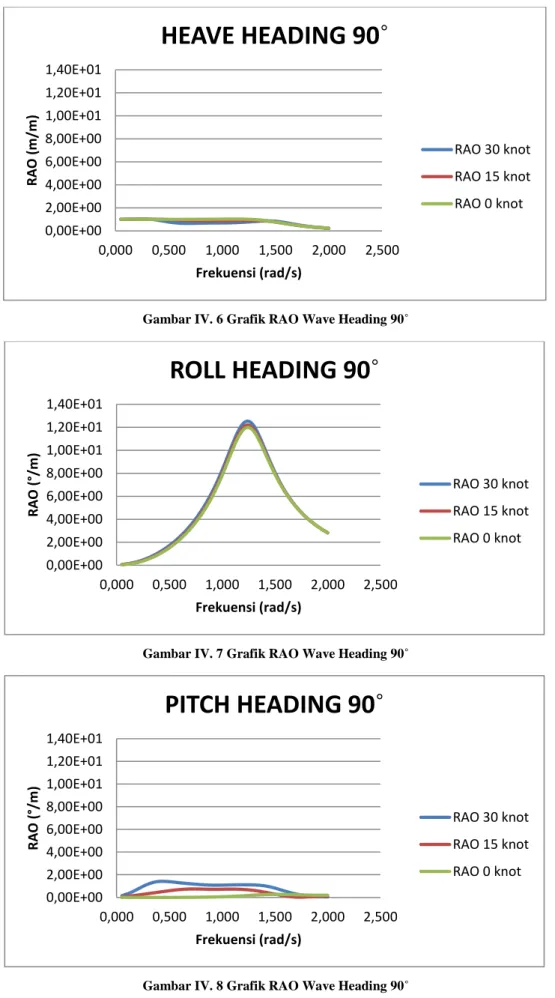
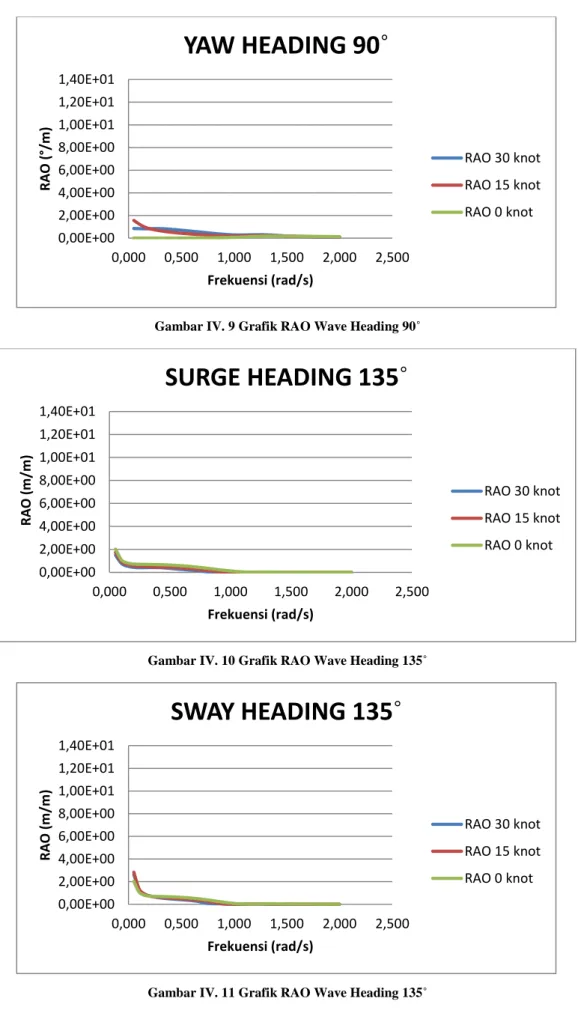
RAO Kapal Perang Tipe Corvette
Perhitungan RAO kapal perang tipe corvette menggunakan variasi kecepatan 30 knot, 15 knot, dan 0 knot. Berikut adalah hasil perhitungannya :
Gambar IV. 4 Grafik RAO Wave Heading 90˚
Gambar IV. 5 Grafik RAO Wave Heading 90˚
0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (m /m ) Frekuensi (rad/s)
SURGE HEADING 90˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 RA O (m /m ) Frekuensi (rad/s)SWAY HEADING 90˚
RAO 30 knot RAO 15 knot RAO 0 knot30
Gambar IV. 6 Grafik RAO Wave Heading 90˚
Gambar IV. 7 Grafik RAO Wave Heading 90˚
Gambar IV. 8 Grafik RAO Wave Heading 90˚
0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 RA O (m /m ) Frekuensi (rad/s)
HEAVE HEADING 90˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)ROLL HEADING 90˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)PITCH HEADING 90˚
RAO 30 knot RAO 15 knot RAO 0 knot31
Gambar IV. 9 Grafik RAO Wave Heading 90˚
Gambar IV. 10 Grafik RAO Wave Heading 135˚
Gambar IV. 11 Grafik RAO Wave Heading 135˚
0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)
YAW HEADING 90˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (m /m ) Frekuensi (rad/s)SURGE HEADING 135˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (m /m ) Frekuensi (rad/s)SWAY HEADING 135˚
RAO 30 knot RAO 15 knot RAO 0 knot32
Gambar IV. 12 Grafik RAO Wave Heading 135˚
Gambar IV. 13 Grafik RAO Wave Heading 135˚
Gambar IV. 14 Grafik RAO Wave Heading 135˚
0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (m /m ) Frekuensi (rad/s)
HEAVE HEADING 135˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)ROLL HEADING 135˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)PITCH HEADING 135˚
RAO 30 knot RAO 15 knot RAO 0 knot33
Gambar IV. 15 Grafik RAO Wave Heading 135˚
Gambar IV. 16 Grafik RAO Wave Heading 180˚
Gambar IV. 17 Grafik RAO Wave Heading 180˚
0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)
YAW HEADING 135˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (m /m ) Frekuensi (rad/s)SURGE HEADING 180˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (m /m ) Frekuensi (rad/s)SWAY HEADING 180˚
RAO 30 knot RAO 15 knot RAO 0 knot34
Gambar IV. 18 Grafik RAO Wave Heading 180˚
Gambar IV. 19 Grafik RAO Wave Heading 180˚
Gambar IV. 20 Grafik RAO Wave Heading 180˚
0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (m /m ) Frekuensi (rad/s)
HEAVE HEADING 180˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)ROLL HEADING 180˚
RAO 30 knot RAO 15 knot RAO 0 knot 0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)PITCH HEADING 180˚
RAO 30 knot RAO 15 knot RAO 0 knot35
Gambar IV. 21 Grafik RAO Wave Heading 180˚
Dari Gambar IV.3 – Gambar IV.20 terlihat pada gerakan roll dengan wave heading 90˚ tidak terdapat perubahan yang signifikan pada variasi kecepatan. Selain itu pada gerakan sway dengan wave heading 90˚ dan 135˚ serta gerakan surge dengan wave heading 180˚ perubahan nilai RAO juga tidak terlalu drastis walaupun cukup terlihat ada perubahan berdasarkan variasi kecepatan. Namun variasi kecepatan terlihat cukup memberikan perubahan pada nilai RAO untuk gerakan surge, sway, heave, pitch dan yaw. Pada gerakan surge dan pitch dengan wave heading 90˚ terjadi nilai perubahan nilai RAO signifikan.
IV.4 Shear Force dan Bending Moment Kapal Perang Tipe Corvette
Pada perhitungan shear force dan bending moment selain menggunakan variasi wave heading dan kecepatan juga ditambahkan posisi shear force dan bending moment sendiri. Jumlah variasi posisi berdasarkan jumlah station pada kapal, dalam hal ini kapal dibagi menjadi 20 station. Nilai shear force maksimal pada tiap-tiap variasi dapat dilihat di Tabel IV.1- Tabel IV.6 dan Grafik IV.21- Grafik IV.32. Sedangkan nilai bending moment maksimal dicantumkan di Tabel IV.7 – Tabel IV.12 dan Grafik IV.33 – Grafik IV.44. Berdasarkan hasil analisa terjadi bending moment maksimal secara bersamaan saat nilai shear force maksimal.
Perhitungan shear force dan bending moment dibagi berdasarkan tipe gelombang yaitu gelombang reguler dan gelombang irreguler. Spektrum gelombang yang dipakai untung menghitung beban gelombang irreguler adalah spektrum gelombang JONSWAP. Pada gelombang irreguler tinggi gelombang dibagi menjadi beberapa kondisi berdasarkan klasifikasi laut sesuai dengan data menurut L. Moskowitz dan W. Pierson yang telah direvisi pada Desember 1964. Sumber data terdapat di buku Dynamics of Marine Vehicles.
0,00E+00 2,00E+00 4,00E+00 6,00E+00 8,00E+00 1,00E+01 1,20E+01 1,40E+01 0,000 0,500 1,000 1,500 2,000 2,500 R A O (° /m ) Frekuensi (rad/s)
YAW HEADING 180˚
RAO 30 knot RAO 15 knot RAO 0 knot36
Tabel IV. 3 Tabel Sea State
Sea State Tinggi Gelombang
Rata-rata (ft) Signifikan (ft) Rata-rata dari 1-10 tertinggi (ft)
4 5,1 6,6 8,4
5 6,6 10,5 13,3
6 8,9 14,3 18,2
7 11,6 18,6 23,6
Untuk menghitung tegangan digunakan penjumlahan antara bending moment yang disebabkan gelombang dengan bending moment pada calm water. Bending moment calm water yang dipakai adalah bending moment secara memanjang (global Y). Berikut ini adalah grafik bending moment static pada global Y
Gambar IV. 22 Contoh Bending Moment Static (Kecepatan 30 knot Wave Heading 180
Gambar IV. 23 Spektrum Gelombang Pada Sea State 4 - 7
0,E+00 5,E+07 1,E+08 2,E+08 2,E+08 3,E+08 0 1 2 3 4 5 6 7 8 9 1011121314151617181920 B e n d in g M o m e n t (N .m ) Station
Bending Moment Y Static
Bending Moment Y Static 0,0000 0,2000 0,4000 0,6000 0,8000 1,0000 0 0,5 1 1,5 2 2,5
S
Ϛ Frequency (Rad/s)Wave Spectrum
4 5 6 737 IV.4.1 Shear Force pada Gelombang Reguler
Berdasarkan hasil perhitungan dengan menggunakan program Ansys Aqwa, shear force maksimal pada tiap-tiap variasi wave heading terletak pada shear force yang mengakibatkan gerakan heave (global Z) memiliki nilai yang paling besar pada semua variasi kecepatan. Berikut ini adalah tabel rekapitulasi nilai shear force maksimal pada variasi wave heading berdasarkan variasi kecepatan.
Gambar IV. 24 Shear Force Global Z Wave Heading 180
Tabel IV. 4 Shear Force Maksimal Kecepatan 30 knot
Vs 30 knot
Heading X (N) Y (N) Z (N) 90˚ 2,79E+05 1,95E+06 3,35E+06 135˚ 6,63E+05 1,21E+06 4,22E+06 180˚ 7,02E+05 3,57E+04 4,35E+06
Tabel IV. 5 Shear Force Maksimal Kecepatan 15 knot
Vs 15 knot
Heading X (N) Y (N) Z (N) 90˚ 1,63E+05 1,96E+06 2,67E+06 135˚ 5,47E+05 1,19E+06 3,09E+06 180˚ 5,30E+05 1,10E+05 2,75E+06 0,00E+00 5,00E+05 1,00E+06 1,50E+06 2,00E+06 2,50E+06 3,00E+06 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Sh e ar Fo rc e (N ) Station
Shear Force Global Z
v = 30 knot ;f = 0.8 rad/s v = 15 knot ; f = 0.8 rad/s v = 0 knot ; f = 0.8 rad/s
38
Tabel IV. 6 Shear Force Maksimal Kecepatan 0 knot
Vs 0 knot
Heading X (N) Y (N) Z (N) 90˚ 2,15E+05 2,01E+06 2,19E+06 135˚ 2,76E+05 8,09E+05 8,88E+05 180˚ 2,28E+05 5,81E+03 6,42E+05
Gambar IV. 25 Shear Force Maksimal Global X
Gambar IV. 26 Shear Force Maksimal Global Y
0,00E+00 2,00E+05 4,00E+05 6,00E+05 8,00E+05 90˚ 135˚ 180˚ Sh e ar Fo rc e (N ) Wave Heading (˚)
Shear Force Global X
Vs = 30 Knot Vs = 15 knot Vs = 0 knot 0,00E+00 5,00E+05 1,00E+06 1,50E+06 2,00E+06 2,50E+06 90˚ 135˚ 180˚ Sh e ar Fo rc e (N ) Wave Heading (˚)
Shear Force Global Y
Vs = 30 knot Vs = 15 knot Vs = 0 knot
39
Gambar IV. 27 Shear Force Maksimal Global Z
Jika dilihat dari grafik, shear force pada sumbu global X memiliki kecenderungan meningkat saat arah gelombang datang dari depan kapal (wave heading 135˚ dan 180˚). Pada sumbu global Y nilai shear force pada saat arah gelombang datang dari samping kapal (wave heading 90˚) jauh lebih besar dibandingkan wave heading lainnya. Selain itu pada sumbu global Y shear force lebih memiliki tren menurun dengan perbedaan yang cukup signifikan pada wave heading 135˚ dan 180˚. Namun pada sumbu global Z nilai shear force pada tiap-tiap kecepatan memiliki tren yang berbeda-beda. Dari grafik diatas juga dapat dilihat bahwa kecepatan memberikan pengaruh yang cukup besar terhadap besar nilai shear force. Shear force pada hampir semua sumbu cenderung memiliki tren yang relatif menurun seiring dengan berkurangnya kecepatan. Pada wave heading 90˚, shear force di sumbu Y memiliki tren yang berbanding terbalik dengan berkurang kecepatan.
IV.4.2 Shear Force pada Gelombang Irreguler
Berdasarkan hasil perhitungan dengan menggunakan program Ansys Aqwa, shear force maksimal pada tiap-tiap variasi wave heading terletak pada shear force yang mengakibatkan gerakan heave (global Z) memiliki nilai yang paling besar pada semua variasi kecepatan. Berikut ini adalah tabel rekapitulasi nilai shear force maksimal pada gelombang irreguler :
Tabel IV. 7 Rekapitulasi Shear Force Maksimal Gelombang Irreguler Sea State 4, dan 5
Vs 30 knot
Sea State 4 5
Heading X (N) Y (N) Z (N) X (N) Y (N) Z (N)
90˚ 3,13E+05 2,11E+06 3,90E+06 5,14E+05 3,17E+06 6,52E+06 135˚ 3,21E+05 2,05E+05 2,05E+06 4,53E+05 2,97E+05 3,19E+06 180˚ 2,44E+05 1,04E+04 1,10E+06 3,83E+05 1,74E+04 1,75E+06
0,00E+00 1,00E+06 2,00E+06 3,00E+06 4,00E+06 5,00E+06 90˚ 135˚ 180˚ Sh e ar Fo rc e (N ) Wave Heading (˚)
Shear Force Global Z
Vs = 30 knot Vs = 15 knot Vs = 0 knot
40 Vs 15 knot
Sea State 4 5
Heading X (N) Y (N) Z (N) X (N) Y (N) Z (N)
90˚ 1,43E+05 2,05E+06 4,46E+06 2,34E+05 3,89E+06 6,58E+06 135˚ 1,07E+05 1,53E+05 1,13E+06 2,17E+05 2,60E+05 1,70E+06 180˚ 1,34E+05 1,20E+04 5,84E+05 2,45E+05 1,91E+04 9,23E+05
Vs 0 knot
Sea State 4 5
Heading X (N) Y (N) Z (N) X (N) Y (N) Z (N)
90˚ 8,86E+04 1,98E+06 4,72E+06 1,87E+05 3,07E+06 5,67E+06 135˚ 8,08E+04 1,61E+05 4,76E+05 2,12E+05 3,16E+05 2,12E+06 180˚ 5,47E+04 9,77E+02 2,34E+05 1,29E+05 1,42E+03 3,64E+05
Tabel IV. 8 Rekapitulasi Shear Force Maksimal Gelombang Irreguler Sea State 6 dan 7
Vs 30 knot
Sea State 6 7
Heading X (N) Y (N) Z (N) X (N) Y (N) Z (N)
90˚ 6,54E+05 5,51E+06 7,50E+06 7,74E+05 6,40E+06 8,71E+06 135˚ 5,55E+05 3,69E+05 4,56E+06 6,69E+05 4,76E+05 6,20E+06 180˚ 5,10E+05 2,47E+04 2,40E+06 6,54E+05 3,35E+04 3,09E+06
Vs 15 knot
Sea State 6 7
Heading X (N) Y (N) Z (N) X (N) Y (N) Z (N)
90˚ 5,47E+05 5,85E+06 9,33E+06 4,47E+06 7,23E+06 1,21E+07 135˚ 3,25E+05 3,76E+05 2,14E+06 4,37E+05 5,29E+05 2,56E+06 180˚ 3,71E+05 2,62E+04 1,30E+06 5,11E+05 3,41E+04 1,71E+06
Vs 0 knot
Sea State 6 7
Heading X (N) Y (N) Z (N) X (N) Y (N) Z (N)
90˚ 3,39E+05 5,27E+06 6,41E+06 7,29E+05 5,88E+06 1,30E+07 135˚ 2,38E+05 6,45E+05 2,99E+06 2,82E+05 6,43E+05 2,17E+06 180˚ 2,23E+05 1,88E+03 4,88E+05 3,47E+05 2,76E+03 6,19E+05
41
Gambar IV. 28 Shear Force Maksimal Global X Kecepatan 30 knot
Gambar IV. 29 Shear Force Maksimal Global X Kecepatan 15 knot
Gambar IV. 30 Shear Force Maksimal Global X Kecepatan 0 knot
0,00E+00 1,00E+05 2,00E+05 3,00E+05 4,00E+05 5,00E+05 6,00E+05 7,00E+05 8,00E+05 9,00E+05 90˚ 135˚ 180˚ Sh e ar Fo rc e (N ) Wave Heading (˚)
Shear Force Global X (Vs = 30 knot)
Sea State 4 Sea State 5 Sea State 6 Sea State 7 0,00E+00 1,00E+06 2,00E+06 3,00E+06 4,00E+06 5,00E+06 90˚ 135˚ 180˚ Sh e ar Fo rc e (N ) Wave Heading (˚)
Shear Force Global X (Vs = 15 knot)
Sea State 4 Sea State 5 Sea State 6 Sea State 7 0,00E+00 1,00E+05 2,00E+05 3,00E+05 4,00E+05 5,00E+05 6,00E+05 7,00E+05 8,00E+05 90˚ 135˚ 180˚ Sh e ar Fo rc e (N ) Wave Heading (˚)
Shear Force Global X (Vs = 0 knot)
Sea State 4 Sea State 5 Sea State 6 Sea State 7