HITUNGAN PERATAAN POSISI 3D TITIK PREMARK SECARA
SIMULTAN PADA SURVEI FOTO UDARA FORMAT KECIL
Harintaka1, Subaryono2, Ilham Pandu Wijaya3
1,2Jurusan Teknik Geodesi, FT-UGM. Jl. Grafika No.2 Yogyakarta 55281 3Alumni Jurusan Teknik Geodesi, FT-UGM. Jl. Grafika No.2 Yogyakarta 55281
INTISARI
Pada Foto Udara Format Kecil (FUFK) yang mempunyai cakupan pemotretan yang lebih sempit daripada foto standar maka diperlukan jumlah Titik Premark (TPm) yang lebih banyak. Pada fotogrametri, TPm yang berfungsi sebagai titik ikat/titik kontrol selalu dipergunakan dalam proses: rektifikasi/ortorektifikasi foto, orientasi absolut, atau trianggulasi udara. Ketelitian posisi TPm sangat menentukan ketelitian produk fotogrametri yang akan dihasilkan. Terdapat berbagai teknologi untuk pengukuran posisi 3D (tiga dimensi) TPm, antara lain: survei GPS/GNSS, Theodolith, dan Total Station (TS). Umumnya, pada penggunaan alat TS untuk penentuan posisi titik secara 3D dilakukan hitungan/adjustment untuk posisi planimetrik (X,Y) secara terpisah dengan posisi ketinggian (Z). Pada makalah ini dikaji hitungan perataan posisi 3D secara simultan/serempak hasil pengukuran alat TS untuk menentukan posisi TPm pada survei FUFK.
Pelaksanaan penelitian dibagi dalam 3 tahap, yaitu perencanaan dan persiapan, operasional lapangan, dan pemrosesan hasil di laboratorium. Perencanaan dan persiapan mencakup penyediaan alat/bahan dan penentuan jalur terbang. Operasional lapangan mencakup pemasangan TPm dan pengukuran secara terestris menggunakan alat TS. Tahap pemrosesan di laboratorium mencakup hitungan koordinat TPm 3D secara simultan dan analisis hasil.
Hasil penelitian menunjukkan bahwa berdasarkan perencanaan jalur terbang, ditentukan 37 lokasi TPm untuk keperluan pemotretan FUFK di wilayah Kecamatan Bayat, Kabupaten Klaten. Perataan kuadrat terkecil secara serempak untuk menghitung posisi koordinat TPm 3D untuk 88 titik menghasilkan ketelitian posisi berkisar antara 4,9 mm sampai 137,8 mm untuk absis (X), 4,7 mm sampai 153,8 mm untuk ordinat (Y), dan 0,3 sampai 7,9 mm untuk tinggi (Z). Hasil uji statistik menunjukkan data ukuran tidak mengandung kesalahan kasar dan sistematik.
Kata kunci: Foto Udara Format Kecil (FUFK), perataan simultan 3D, Total Station (TS),
Titik Premark (TPm), ketelitian posisi.
PENGANTAR
Pada fotogrametri, termasuk pula FUFK, untuk transformasi antar sistem koordinat selalu diperlukan titik ikat/titik kontrol. Jenis transformasi yang sering ditemui dalam fotogrametri dan memerlukan titik ikat/titik kontrol adalah: transformasi dari sistem koordinat foto ke sistem tanah/peta, sistem koordinat foto ke sistem model, dan sistem koordinat model ke sistem peta.
Berdasarkan pengadaan dan kenampakannya, titik kontrol dapat dibedakan dalam 3 kategori, yaitu: titik premark (TPm), titik postmark, dan buatan (artificial) (Habib, 2007). Dari ketiga jenis titik kontrol tersebut, jika dipergunakan untuk
keperluan fotogrametri, TPm memiliki ketelitian posisi yang paling baik. Hal ini disebabkan titik tersebut sudah didesain dan ditempatkan di lapangan saat akan dilakukan pemotretan udara, sehingga identifikasinya dapat dilakukan secara akurat.
Pada FUFK yang mempunyai cakupan pemotretan yang lebih sempit daripada foto standar maka diperlukan TPm yang lebih banyak daripada foto standar. Penambahan jumlah TPm membawa konsekuensi peningkatan biaya operasional. Jadi, selain memiliki ketelitian yang baik, maka TPm seharusnya juga murah dalam pengadaannya. TPm dapat diadakan dengan survei GPS/GNSS atau survei terestris. Meskipun sewa alat GPS/GNSS untuk survei GPS/GNSS masih cukup mahal untuk ukuran komunitas Indonesia, tetapi teknik ini sesuai untuk daerah pemotretan yang luas dan antar titik tidak saling terlihat. Tetapi, untuk cakupan pemotretan FUFK yang relatif sempit maka pengadaan dan pengukuran TPm dengan survei terestris akan lebih ekonomis dan applicable.
Terdapat berbagai peralatan untuk survei terestris, yaitu: penyipat data untuk mengukur beda tinggi dan menentukan tinggi (Z), Teodolith dan Total Station (TS) untuk menentukan posisi secara 3D (X,Y,Z). Teodolith yang masih menggunakan sistem optis memerlukan waktu cukup lama dalam pengukuran dan pembacaan target, sedangkan TS dapat dioperasikan secara cepat dan memiliki presisi yang baik. Pada TS, optik hanya dipergunakan untuk pointing saja, sedangkan pengukuran jarak dan sudut (horizontal dan vertikal) sudah dilakukan secara elektronik.
Berdasarkan uraian sebelumnya, pada makalah ini dikaji tentang hitungan posisi TPm secara simultan 3D untuk keperluan pemotretan FUFK. Peralatan yang dipergunakan untuk pengukuran TPm adalah alat TS Nikon DTM 352.
METODOLOGI Model Matematis
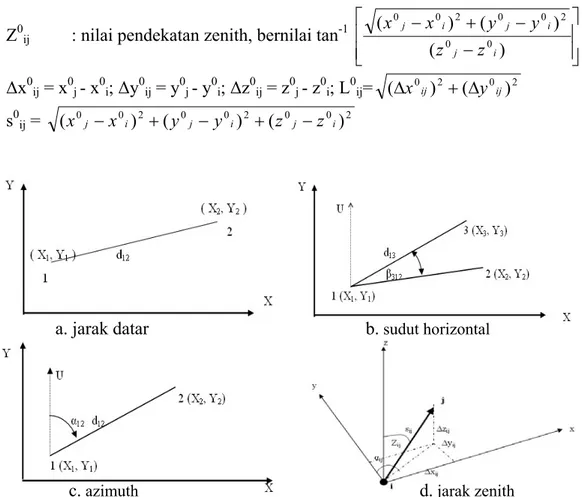
Posisi 3D suatu titik terdiri dari absis, ordinat, dan ketinggian (X,Y,Z). Pada saat pengukuran, yang diperoleh adalah jarak, sudut horizontal, azimuth, dan jarak zenith (Gambar 1). Fungsi data ukuran terhadap parameter posisi 3D tersebut merupakan persamaan yang tidak linier, sehingga perlu dilinearisasi menggunakan deret Tylor. Prinsip linearisasinya adalah melakukan diferensialisasi persamaan tersebut terhadap parameter yang dicari, dengan bentuk umum:
F (X) = L + V = F (X) + 0 ) ( ) ( X X X X F = δ δ X + ... __________________ (1) Model matematik untuk linearisasi persamaan jarak datar adalah :
d12+Vd12=do12+ 1 12 x d δ δ x1=x1o x1+ 1 12 y d δ δ y1=y1o y1 + 2 12 x d δ δ x2=x2o x2+ 2 12 y d δ δ y2=y2o y2 (2) dalam hal ini:
d12 : nilai pengamatan jarak 1 dan 2 Vd12 : koreksi pengamatan jarak d12
do12 : nilai pendekatan jarak d12 = [(xo2 – xo1)2 + (yo2 – yo1)2]0.5 Model matematik untuk linearisasi persamaan sudut horizontal adalah :
β312 + Vβ312 = βo312 + 1 312 x
δ
δβ
x1=x1o x1 + 1 312 yδ
δβ
y1=y1o y1 + 2 312 xδ
δβ
x2=x2o x2 + 2 312 y δ δβ y2=y2o y2 + 3 312 x δ δβ x3=x3o x3 + 3 312 y δ δβ y3=y3o y3_________________________ (3) dalam hal ini:β312 : nilai pengamatan sudut β312 Vβ312 : koreksi pengamatan sudut β312 βo312 : nilai pendekatan sudut β312
Model matematik untuk linearisasi persamaan azimuth adalah :
12 12 α α +V = 1 12 2 1 2 x D y y −
δ
− + 1 12 2 1 2 y D x x −δ
+ 2 12 2 1 2 x D y y −δ
2 12 2 1 2 y D x x −δ
− +α
012____ (4)dalam hal ini:
12
α
: nilai pengamatan azimuth12
α
V : koreksi pengamatan azimuth
12 0
α
: nilai pendekatan azimuth aintara titik 1 ke titik 2. Model matematik untuk linearisasi persamaan azimuth:Zij + vZij = Z0ij - 0 2 0 0 ) ( oij ij ij ij s L z x ∆ ∆ δxi - 0 2 0 0 ) ( oij ij ij ij s L z y ∆ ∆ δyi + 2 0 ) ( oij ij s L δzi + 0 2 0 0 ) ( oij ij ij ij s L z x ∆ ∆ δxj + 2 0 0 0 ) ( oij ij ij ij s L z y ∆ ∆ δyj - 2 0 ) ( oij ij s L δzj _______________________________________ (5) dalam hal ini:
Zij : nilai pengamatan jarak zenith vZij : koreksi pengamatan jarak zenith
Z0ij : nilai pendekatan zenith, bernilai tan-1 − − + − ) ( ) ( ) ( 0 0 2 0 0 2 0 0 i j i j i j z z y y x x ∆x0ij = x0j - x0i; ∆y0ij = y0j - y0i; ∆z0ij = z0j - z0i; L0ij= (∆x0ij)2 +(∆y0ij)2 s0 ij = (x0j −x0i)2 +(y0j −y0i)2 +(z0j −z0i)2
Gambar 1. Pengukuran (a). jarak datar, (b). sudut horizontal, (c). azimuth, (d). jarak zenith Sesuai dengan persamaan (2) sampai (5), parameter yang diestimasi adalah parameter pendekatan, maka untuk estimasi parameter sebenarnya perlu dilakukan hitungan iterasi. Jika data dan parameter pendekatannya cukup baik, maka iterasi akan konvergen dengan cepat. Terdapat berbagai skema penghentian iterasi, yang cukup banyak digunakan adalah memberikan batas selisih tertentu antara iterasi dengan iterasi sebelumnya, misal 1 mm.
Idealnya setiap pengamatan/pengukuran hanya mengandung kesalahan acak saja, tidak mengandung kesalahan non acak (sistematik dan kasar). Nilai varian dan koreksi ukuran hasil pengamatan dapat dijadikan indikator untuk mendeteksi adanya kesalahan non acak tersebut, yaitu dengan melakukan uji statistik. Pengujian statistik tersebut dilakukan dengan cara menganalisis kesesuaian antara varian aposteori dengan varian apriori.
Uji statistik tersebut meliputi uji global dan uji blunder (data snooping ). Uji global digunakan untuk mengetahui ada tidaknya kesalahan kasar yang mempengaruhi data pengamatan setelah dilakukan hitung perataan, dengan cara membandingkan nilai
a. jarak datar b. sudut horizontal
varian aposteori dengan nilai varian apriori, menggunakan fungsi Fisher. Jika pengujian tidak lolos maka mengindikasikan pengukuran masih mengandung kesalahan kasar dan/atau sistematik sehingga diperlukan uji blunder atau data snooping.
Uji blunder digunakan untuk mendeteksi data yang mengandung kesalahan sistematik atau blunder tersebut. Secara teoritis, jika uji blunder tidak lolos maka dapat disebabkan antara lain oleh: model matematis yang keliru, kesalahan menghitung, ill condition system, penghapusan derajat tinggi, ketidak-tepatan mengestimasi varian apriori (bobot pengamatan), atau adanya blunder pada data ukuran.
Gambar 2. Elips kesalahan 2D.
Salah satu cara untuk visualisasi ketelitian posisi adalah menggunakan elips kesalahan (Gambar 2). Persamaan untuk menghitung panjang sumbu semi-major (σ’x2) dan semi-minor (σ’y2) elips kesalahan:
σ’x2 =
2
2 2 y xσ
σ
+
+ 2 1 2 2 2 2 4 ) ( + + xy y x σ σ σ σ’y2 = 2 2 2 y xσ
σ
+ - 2 1 2 2 2 2 4 ) ( + + xy y x σ σ σ , sudut orientasi φ: − − y x xy 2 2 1 2 tan 2 1 σ σ σ ________________________________ (6)Alat dan bahan
Alat dan bahan yang dipergunakan adalah:
1. Total Station (TS) Nikon DTM 352 dengan 3 buah statif dan 2 buah reflektor/target.
2. Rol meter untuk mengukur tinggi alat dan target.
3. Komputer dengan processor AMD Athlon 64 X2 4000, memori DDR2 1000 MB, dan harddisk 160 GB untuk komputasi.
4. Perangkat lunak TransIt untuk download data TS, Matlab untuk pembuatan program, dan AutoCad untuk penggambaran.
5. Tugu dan target titik Premark
Pelaksanaan
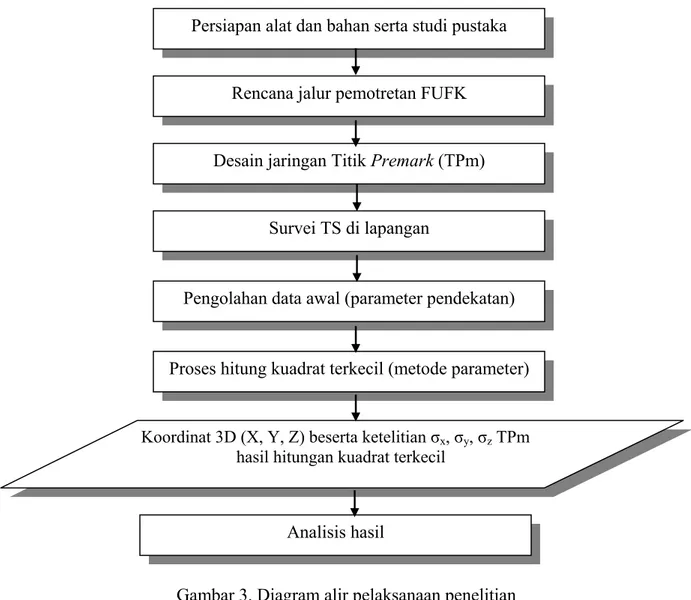
Prosedur penelitian secara lengkap dapat disimak pada Gambar 3. Pada Gambar tersebut ditunjukkan tahapan operasional keseluruhan penelitian. Khusus untuk tahapan hitungan posisi koordinat 3D secara simultan menggunakan teknik kuadrat terkecil metode parameter dapat dilihat pada Gambar 4.
Gambar 3. Diagram alir pelaksanaan penelitian Persiapan alat dan bahan serta studi pustaka
Pengolahan data awal (parameter pendekatan)
Proses hitung kuadrat terkecil (metode parameter)
Koordinat 3D (X, Y, Z) beserta ketelitian σx, σy, σz TPm
hasil hitungan kuadrat terkecil
Analisis hasil
Rencana jalur pemotretan FUFK
Desain jaringan Titik Premark (TPm)
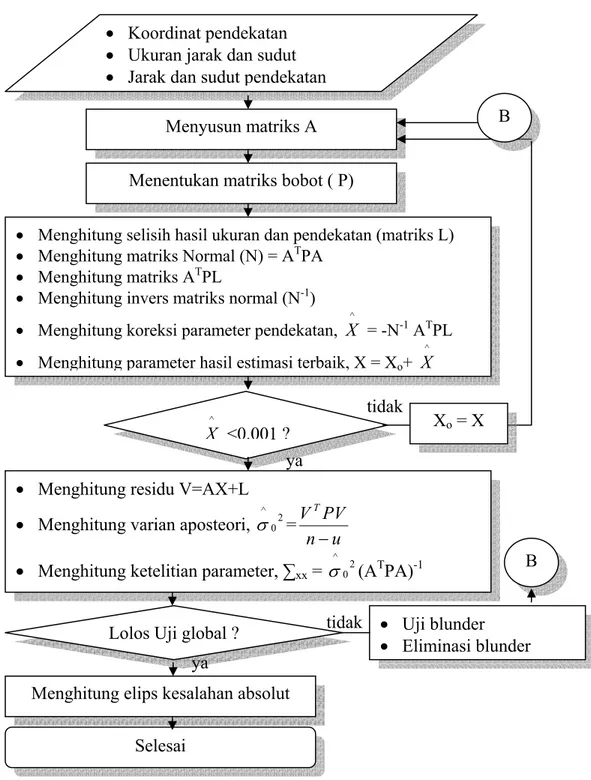
Gambar 4. Diagram alir hitung posisi koordinat 3D secara simultan menggunakan kuadrat terkecil metode parameter
HASIL DAN PEMBAHASAN
Untuk keperluan bundle block adjustment, umumnya pengadaan titik kontrol tanah dilakukan setiap 4 atau 6 model (Konecny, 2003). Meskipun demikian, seringkali di lapangan titik kontrol tersebut dapat diperapat. Hal ini ditujukan untuk
• Koordinat pendekatan • Ukuran jarak dan sudut • Jarak dan sudut pendekatan
Menyusun matriks A
• Menghitung selisih hasil ukuran dan pendekatan (matriks L)
• Menghitung matriks Normal (N) = ATPA
• Menghitung matriks ATPL
• Menghitung invers matriks normal (N-1)
• Menghitung koreksi parameter pendekatan, X^ = -N-1 ATPL
• Menghitung parameter hasil estimasi terbaik, X = Xo+
^
X
^
X <0.001 ?
B • Menghitung residu V=AX+L
• Menghitung varian aposteori, 2 0 ^
σ
= u n PV VT − • Menghitung ketelitian parameter, ∑xx = 02^
σ
(ATPA)-1Lolos Uji global ? • Uji blunder • Eliminasi blunder
Selesai
Menentukan matriks bobot ( P)
Menghitung elips kesalahan absolut
tidak B ya ya tidak Xo = X
mengantisiapasi ketidaksesuaian perencanaan pemotretan (flight planning) dengan realisasi pemotretan udara. Pada Gambar 5 (a) disajikan daerah pemotretan dan 5.(b) jalur terbang perencanaan. Desain letak TPm tersebut perlu disesuaikan dengan kondisi daerah dan tuntutan saling terlihat antar TPm. Contoh bentuk TPm dan pengukuran posisinyanya di lapangan dapat dilihat pada Gambar 6(a), 6 (b) dan 6 (c).
Gambar 5. (a) area pemotretan. (b). jalur terbang rencana
Gambar 6. (a). Titik Premark, (b). Setting TS pada Titik Premark ,(c)Prisma untuk target TS.
Berdasarkan perencanaan jalur terbang dan penyesuaian dengan kondisi daerah maka dapat ditentukan 37 posisi TPm (Gambar 5 b). Pada saat diukur, beberapa titik tidak saling terlihat sehingga diperlukan titik perapatan. Jumlah semua titik pengamatan adalah 88 buah. Pengukuran TPm menggunakan alat beserta aksesorisnya (antara lain: statif, prisma target) (Gambar 6 a, b, c).
Bobot ukuran dapat diperoleh dari satu per varian ukuran dimana diasumsikan tidak ada korelasi antar pengukuran. Adapun simpangan baku alat Total Station yang
a b
b
digunakan adalah σDIN = 5”, σc = 0,002 m, σt = 0,01 m, dan ketelitian EDM (normal) = 10 mm + 3 ppm.
Dalam hitung perataan, untuk model matematika yang tidak linier maka harus terlebih dahulu melinierkan model persamaan yang dibuat, dan yang dihitung pada saat perataan adalah besarnya koreksi parameter yang akan dikoreksikan pada parameter pendekatan sebelumnya. Dalam penghitungannya harus dilakukan iterasi. Pada iterasi kedua, parameter pendekatannya adalah parameter pendekatan pertama ditambah koreksi parameter yang didapat pada hitungan iterasi pertama. Pada hitung perataan ini, iterasi dihentikan pada iterasi ke-3 karena penambahan koreksinya sudah tidak signifikan.
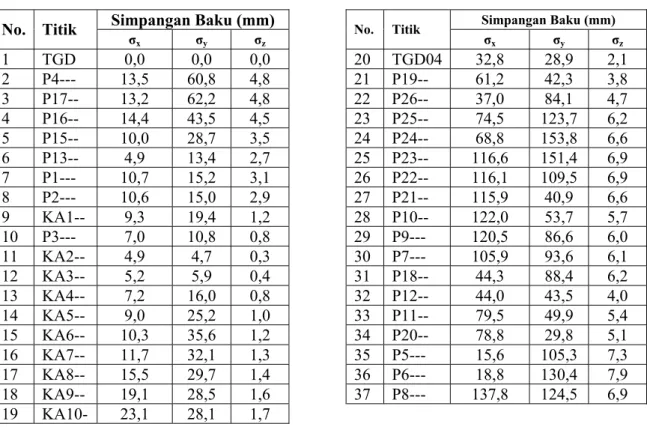
Hitungan posisi 3D secara simultan adalah proses hitung kuadrat terkecil dengan menghitung koordinat planimetrik (X,Y) dan tinggi (Z) secara bersama-sama dalam satu perataan pada suatu jaringan. Simpangan baku koordinat 3D yang dihitung menggunakan 2 titik ikat dapat dilihat pada Tabel 1.
Tabel 1. Simpangan bakunya setiap TPm.
Simpangan Baku (mm) Simpangan Baku (mm)
No. Titik σx σy σz No. Titik σx σy σz 1 TGD 0,0 0,0 0,0 20 TGD04 32,8 28,9 2,1 2 P4--- 13,5 60,8 4,8 21 P19-- 61,2 42,3 3,8 3 P17-- 13,2 62,2 4,8 22 P26-- 37,0 84,1 4,7 4 P16-- 14,4 43,5 4,5 23 P25-- 74,5 123,7 6,2 5 P15-- 10,0 28,7 3,5 24 P24-- 68,8 153,8 6,6 6 P13-- 4,9 13,4 2,7 25 P23-- 116,6 151,4 6,9 7 P1--- 10,7 15,2 3,1 26 P22-- 116,1 109,5 6,9 8 P2--- 10,6 15,0 2,9 27 P21-- 115,9 40,9 6,6 9 KA1-- 9,3 19,4 1,2 28 P10-- 122,0 53,7 5,7 10 P3--- 7,0 10,8 0,8 29 P9--- 120,5 86,6 6,0 11 KA2-- 4,9 4,7 0,3 30 P7--- 105,9 93,6 6,1 12 KA3-- 5,2 5,9 0,4 31 P18-- 44,3 88,4 6,2 13 KA4-- 7,2 16,0 0,8 32 P12-- 44,0 43,5 4,0 14 KA5-- 9,0 25,2 1,0 33 P11-- 79,5 49,9 5,4 15 KA6-- 10,3 35,6 1,2 34 P20-- 78,8 29,8 5,1 16 KA7-- 11,7 32,1 1,3 35 P5--- 15,6 105,3 7,3 17 KA8-- 15,5 29,7 1,4 36 P6--- 18,8 130,4 7,9 18 KA9-- 19,1 28,5 1,6 37 P8--- 137,8 124,5 6,9 19 KA10- 23,1 28,1 1,7
Setelah mendapatkan parameter koordinat hasil hitung perataan, maka dicari ketelitian parameter menggunakan matriks varian kovarian parameter. Simpangan baku
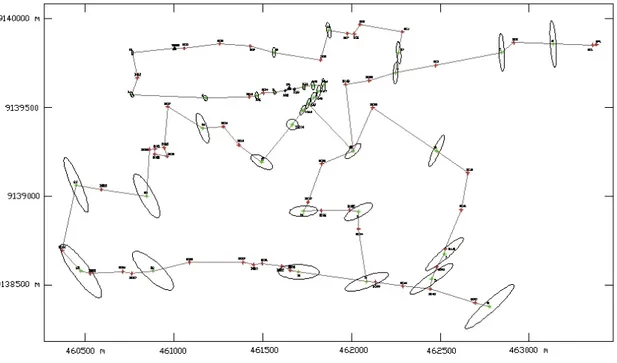
parameter dihitung dari akar elemen utama matriks varian kovarian tersebut. Ketelitian koordinat dapat dilihat pada Tabel 1. Tabel 1 dan Gambar 7 dan 8 menunjukkan kecenderungan ketelitian koordinat akan berkurang pada titik poligon yang jauh dari titik ikat. Hal tersebut dikarenakan adanya perambatan kesalahan dalam pengukuran.
Gambar 7. Gambar elips kesalahan pada jaringan poligon
Gambar 8 Ketelitian tinggi untuk titik Premark dan perapatannya
Dari hasil komputasi untuk jumlah data 273, jumlah parameter 258, maka diperoleh residu 15 dan varian aposteriori 0,1293. Dari uji F dengan derajad
kepercayaan 90% diperoleh nilai F tabel 1,53 dan uji global menunjukkan data pengukuran tidak mengandung kesalahan non acak, sehingga tidak diperlukan lagi snooping data.
Elips kesalahan absolut TPm dapat disajikan secara grafis dengan sumbu semi-mayor dan sumbu semi-minor elips kesalahan absolut beserta sudut orientasinya (Gambar 7). Terlihat, semakin jauh posisi titik premark dari titik ikat, maka nilai elip kesalahannya semakin besar.
KESIMPULAN DAN SARAN
Berdasarkan hasil penelitian dapat disimpulkan bahwa berdasarkan perencanaan jalur terbang, ditentukan 37 lokasi TPm untuk keperluan pemotretan FUFK di wilayah Kecamatan Bayat, Kabupaten Klaten. Perataan kuadrat terkecil secara serempak untuk menghitung posisi koordinat TPm 3D untuk 88 titik menghasilkan ketelitian posisi berkisar antara 4,9 mm sampai 137,8 mm untuk absis (X), 4,7 mm sampai 153,8 mm untuk ordinat (Y), dan 0,3 sampai 7,9 mm untuk tinggi (Z). Hasil uji statistik menunjukkan data ukuran tidak mengandung kesalahan kasar dan sistematik.
Dari penelitian yang telah dilakukan dapat diberikan saran selain dengan perataan kuadrat terkecil metode parameter, perlu dikaji perataan dengan cara bayesian yang memperhitungkan kesalahan titik ikat.
DAFTAR PUSTAKA
Anonim, 2006, Instruction Manual Nicon Total Station DTM-302 Series, Nicon-Trimble Co. Limited, USA.
Habib, A., 2004, High Resolution Imaging Satellites: Modeling and Applications, Department of Geomatics Engineering, University of Calgary, ISRS, 28 Oktober 2004.
Konecny, G., 2003, Geoinformation: Remote Sensing, Photogrammetry, and Geographic Information Syatems, ISBN: 0-415-23795-5, Taylor & Francis, London, UK
Kuang, S., 1996, Geodetic Network And Optimal Design : Consepts And Applications, Ann Arbor Press Inc, Chelsea, Michigan, USA.
Mikhail, E., 1981, Analysis And Adjustment of Survey Measurements, Van Nostrand Reinhold Company Inc, New York, USA.
Uotila, U.A., 1985, Adjustment Computations, Notes, Department Of Geodetic Science and Surveying The Ohio States University Columbus, Ohio.
Wolf, P. R., 1981, Adjustment Computitions, Second Edition, P.B.L.Publishing Co, Madison, Wisconsin.