RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF-UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN
METODE FUZZY
(Eko Tri Wasisto,Fitri Adi Iskandarianto, S.T, M.T, Ir. Matradji M.Sc)
Jurusan Teknik Fisika – Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih – Sukolilo, Surabaya 60111
Email : [email protected]
Abstrak
Penelitian ini menghadirkan penerapan mikrokontroler pada suatu model UAV (Unmanned Aerial Vehicle) Quadrotor berbasis logika fuzzy untuk perilaku maju mundur, mengangguk ke depan belakang, miring ke kiri dan miring ke kanan. Kendali logika fuzzy yang dibangun menggunakan pendekatan berbasis perilaku (behavior-based approach) berdasarkan informasi dari sensor accelerometer 3-Axis MMA-7260. Pendekatan berbasis perilaku ini diimplementasikan dalam beberapa perilaku individual yang memiliki tingkat prioritas yang berbeda. Adapun perilaku yang dibangun adalah : gerakan maju mundur, gerakan mengangguk ke depan dan kebelakang, gerakan miring ke kiri dan miring ke kanan. Hasil penelitian menunjukkan bahwa quadrotor DF-UAV01 mampu melakukan perilaku yang direncanakan dengan setpoint pada masing-masing motor yang telah dihasilkan dengan metode fuzzy logic untuk setiap perilaku.
Kata kunci : mikrokontroller , quadrotor, accelerometer 3-axis MMA-7260, logika fuzzy, pendekatan
berbasis perilaku
1. PENDAHULUAN 1.1 Latar BelakangUAV (Unmanned Aerial Vehicle) merupakan salah satu teknologi yang sedang mengalami perkembangan yang pesat dan memiliki potensi yang sangat besar, baik untuk keperluan militer maupun sipil. Ada banyak tipe UAV yang dikenal. Contohnya adalah
fixed wing, axial wing, coaxial wing, dan quadrotor. Quadrotor pertama dikabarkan memiliki massa yang
besar dan hanya dapat mengangkat beban yang ringan untuk waktu yang singkat. Quadrotor pertama dikabarkan memiliki massa yang besar dan hanya dapat mengangkat beban yang ringan untuk waktu yang singkat. Quadrotor adalah helikopter yang tersusun atas empat buah rotor yang diletakkan simetris pada tepi-tepi ujungnya. Quadrotor memiliki kemampuan untuk melakukan pendaratan dan lepas landas secara vertikal, yang biasa dikenal dengan istilah Vertical Take-Off and Landing (VTOL).
Quadrotor juga memiliki kemampuan untuk bergerak
dalam arah sumbu x, y, dan z. Gerakan dan kecepatan
quadrotor ditentukan oleh kecepatan masing-masing
rotor. Disamping harus mengendalikan kecepatan masing-masing rotor, dalam Unmanned Aerial Vehicle harus diperhatikan juga mengenai pengendalian dalam hal attitude (sikap) dari quadrotor tersebut. Sikap tersebut antara lain yaitu gerakan akselerasi (throttle/heaving) yaitu gerakan menambah atau menurunkan kecepatan masing-masing rotor dengan besar yang sama. Dengan melakukan penambahan kecepatan tiap-tiap rotor dengan besar yang sama, quadrotor akan bergerak searah sumbu z dengan mengacu pada koordinat
quadrotor. Gerakan mengguling (roll) yaitu pergerakan dengan cara meningkatkan (atau menurunkan) kecepatan putar rotor kanan pada
quadrotor dan bersamaan dengan itu, menurunkan
(atau meningkatkan) kecepatan putar rotor kiri. Gerakan mengangguk (pitch) yaitu pergerakan yang
sama dengan roll. Implementasi gerakan ini dilakukan dengan cara meningkatkan (atau menurunkan) kecepatan putar rotor depan pada
quadrotor dan bersamaan dengan itu, menurunkan
(atau meningkatkan) kecepatan putar rotor belakang. Gerakan memutar (yaw) yaitu pergerakan yang dilakukan dengan cara meningkatkan (atau menurunkan) kecepatan putar pasangan rotor kanan dan kiri pada quadrotor dan bersamaan dengan itu, menurunkan (atau meningkatkan) kecepatan putar pasangan rotor depan dan belakang.
Oleh karena itu, disamping melakukan rancang bangun, pada tugas akhir ini akan dilakukan juga penelitian dan analisa mengenai pengendalian attitude (sikap) dari quadrotor. Karena pengendalian terhadap attitude ini sangat penting diantaranya untuk kestabilan quadrotor pada saat dia diam atau pada saat dia bergerak. Penelitian dan analisa yang dilakukan ditekankan pada dua buah sensor yang digunakan pada
quadrotor yaitu sensor gyro yang digunakan
untuk mengatur arah orientasi dari quadrotor (kecepatan dia akan mengoleng pada saat dia terbang) dengan bertumpu pada poros sumbu dan sensor accelerometer yang digunakan untuk sensor kecepatan.
1.2 Permasalahan
Permasalahan yang diangkat untuk penyelesaian tugas akhir ini adalah bagaimana merancang bangun dan mengendalikan sistem control attitude (sikap) pada UAV Quadrotor dengan menggunakan metode fuzzy logic.
1.3 Batasan Masalah
Batasan permasalahan dalam penelitian ini adalah:
1. Tugas akhir ini hanya memfokuskan pengendalian pada sensor UAV yaitu accelerometer yang berfungsi sebagai control attitude.
2. Attitude (sikap) yang dianalisis adalah gerak maju- mundur dan gerak mengoleng ke kiri-kanan pada UAV Quadrotor.
3. Kondisi hardware digantungkan untuk mengkondisikan seolah-olah pada kondisi terbang.
4. Software yang digunakan antara lain : Visual Basic, Code Vision AVR.
1.4 Tujuan
Tujuan dan manfaat dari pengerjaan tugas akhir ini adalah untuk mengontrol attitude (sikap) pada UAV Quadrotor untuk stabilitas penyearah.
1.5 Metodologi Penelitian
Dalam perancangan ini, langkah-langkah yang dilakukan untuk mencapai tujuan penelitian adalah sebagai berikut :
1. Studi literatur terhadap materi yang terkait dengan pelaksanaan tugas akhir yang akan dilakukan, mengenai:
• Pemahaman mengenai Quadrotor
• Pemahaman mengenai sensor accelerometer. • Pemahaman mengenai system kontrol fuzzy
logic untuk mengontrol attitude dari quadrotor.
2. Pra-eksperimen
• Pembuatan plant UAV quadrotor
• Merancang system kendali untuk sensor attitude dengan fuzzy logic.
• Penentuan kinerja dan penentuan range (set point) dari sensor accelerometer untuk mengontrol attitude (sikap) dari quadrotor. • Pembuatan simulasi untuk control attitude
quadrotor. 3. Eksperimen
• Pengujian terhadap sensor yang digunakan pada UAV quadrotor, accelerometer terhadap berbagai posisi, miring ke kanan dan miring ke kiri, condong ke depan dan ke belakang, maju dan mundur sehingga nanti didaptkan range nilai pada tiap posisi tersebut untuk dijadikan sebagai masukkan pada tahap selanjutnya.
• Pengujian dengan menggunakan pengendalian bertingkat berbasis logic solver dengan mensingkronkan software dan hardware. Dalam proses koneksi hardware dan software ini menggunakan perangkat mikrokontroler dan software Visual Basic atau bisa dengan menggunakan Lab. View. • Pemvalidasian data.
• Pengintegrasian software dan hardware • Pengujian
Untuk memudahkan pembacaan dan pemahaman terhadap laporan tugas akhir ini, maka diberikan sistematika penulisan laporan tugas akhir sebagai berikut:
a. BAB I Pendahuluan
Bab I ini terdiri dari latar belakang, permasalahan, batasan masalah, tujuan, metodologi penelitian, dan sistematika laporan.
b. BAB II Teori Penunjang
Pada bab II ini dibahas mengenai teori-teori yang berkaitan dengan penelitian yang akan dilakukan, seperti UAV (Unmanned aerial vehicle), quadrotor, teori tentang sensor accelerometer , teori tentang sistem fuzzy.
c. BAB III Metodologi Penelitian
Pada bab ini berisi mengenai rancangan dari penelitian yang dilakukan, metode, dan langkah-langkah dalam penelitian.
d. BAB IV Analisa Data dan Pembahasan
Pada bab ini berisi tentang data hasil pengujian dari sensor accelerometer yang nantinya akan di olah kontroler logika fuzzy, uji performansi terhadap sensor accelerometer, dan simulasi program.
e. BAB V Kesimpulan dan Saran
Pada bab ini diberikan kesimpulan tentang tugas akhir yang telah dilakukan berdasarkan data-data yang diperoleh, serta diberikan saran sebagai penunjang maupun pengembangan tugas akhir selanjutnya
.
2. TEORI PENUNJANG2.1 UAV (Unmanned Aerial Vehicle)
UAV (Unmanned Aerial Vehicle) atau kendaraan
udara tanpa awak adalah salah satu teknologi yang sedang mengalami perkembangan yang pesat dan memiliki potensi yang sangat besar, baik untuk keperluan militer maupun sipil. Contoh aplikasinya adalah untuk survey, patroli, deteksi tambang mineral, riset, dan lain-lain. Kelebihan dari UAV adalah dapat digunakan pada misi-misi berbahaya tanpa membahayakan nyawa pilot. Penggunaan UAV pada bidang militer dimulai pada Perang Dunia I tahun 1917. Namun, pada masa itu, UAV yang dihasilkan masih kurang akurat dan belum bisa dikendalikan seperti yang diinginkan. Meskipun demikian, UAV dinilai memiliki prospek cerah di masa mendatang. Karena itu, dimulailah berbagai riset tentang UAV, yang mencapai puncaknya pada konflik Semenanjung Balkan tahun 1990-an dan Operasi Badai Pasir tahun 1991.
Setiap UAV memiliki fungsi yang berbeda satu dengan yang lain fungsi atau kegunaan UAV yaitu : 1. Pengindraan jarak jauh UAV fungsi penginderaan jauh mencakup sensor spektrum elektromagnetik , sensor biologis, dan sensor kimia. Sebuah UAV's dengan sensor elektromagnetik biasanya mencakup spektrum visual , inframerah , atau kamera dengan inframerah dan juga sistem radar. Detektor gelombang elektromagnetik lain seperti microwave dan sensor spektrum ultraviolet juga dapat digunakan, tapi tidak umum . Sensor sensor biologis mampu mendeteksi kehadiran udara berbagai mikroorganisme dan faktor-faktor biologi lainnya. Sensor kimia menggunakan spektroskopi laser untuk menganalisis konsentrasi dari setiap elemen di udara.
2. Transportasi UAV dapat mengangkut barang dengan menggunakan berbagai cara yang didasarkan pada konfigurasi dari UAV itu sendiri. Kebanyakan muatan disimpan dalam bagian pesawat , namun untuk uav dengan bentuk helikopter dapat mengangkut di bagian luarnya , kebanyakan UAV digunakan untuk mengangkut kargo kargo ringan yang membutuhkan kecepatan pengiriman dan memiliki resiko pengiriman tinggi
3. Penelitian Ilmiah pesawat tanpa awak mampu menembus daerah daerah berbahaya yang tidak memungkinkan bila menggunakan pesawat berpilot , misalnya daerah pusat badai , perburuan angin topan ,penlitian terbang pada ketinggian tertentu yang berbahaya bagai manusia dan lain lain.
4. Penyerang Bersenjata , beberapa UAV seperti Predator RQ-1 telah dapat melakukan serangan ke target – target darat , bahkan Predator RQ-1 juga telah dapat digunakan untuk mengadakan pertempuran antar pesawat , kemampuan yang dimiliki UAV ini sangat menguntungkan bagi negara – negara maju karena resiko pengunaan pilot sebagai sandera atau tawanan perang telah dapat dihilangkan , dan juga dapat digunakan untuk misi misi rahasia dan yang bersifat sensitif dalam dunia politik internasional
5. SAR [ Search and Rescue] kemampuan UAV untuk terbang pada daerah berbahaya memungkinkan UAV dapat terbang bahakan dalam cuaca terburuk sekalipun , sehingga dapat meningkatkan efektifitas dalam pencarian korban kecelakanan ataupun korban cuaca buruk lainnya , dan daya terbang UAV yang tidak tergantung pada ketahanaan pilot mememungkinkan UAV terus menurus mencari korban tanpa berhenti.
2.2 Quadrotor
Quadrotor adalah helikopter yang tersusun atas empat
buah rotor yang diletakkan simetris pada tepi-tepi ujungnya. Quadrotor memiliki kemampuan untuk melakukan pendaratan dan lepas landas secara vertikal, yang biasa dikenal dengan istilah Vertical Take-Off and
Landing (VTOL). Quadrotor juga memiliki kemampuan
untuk bergerak dalam arah sumbu x, y, dan z, seperti yang ditunjukkan oleh gambar 2.1. Gerakan dan kecepatan
quadrotor ditentukan oleh kecepatan masing-masing rotor.
Gambar 2.1 pengaturan kecepatan pada quadrotor
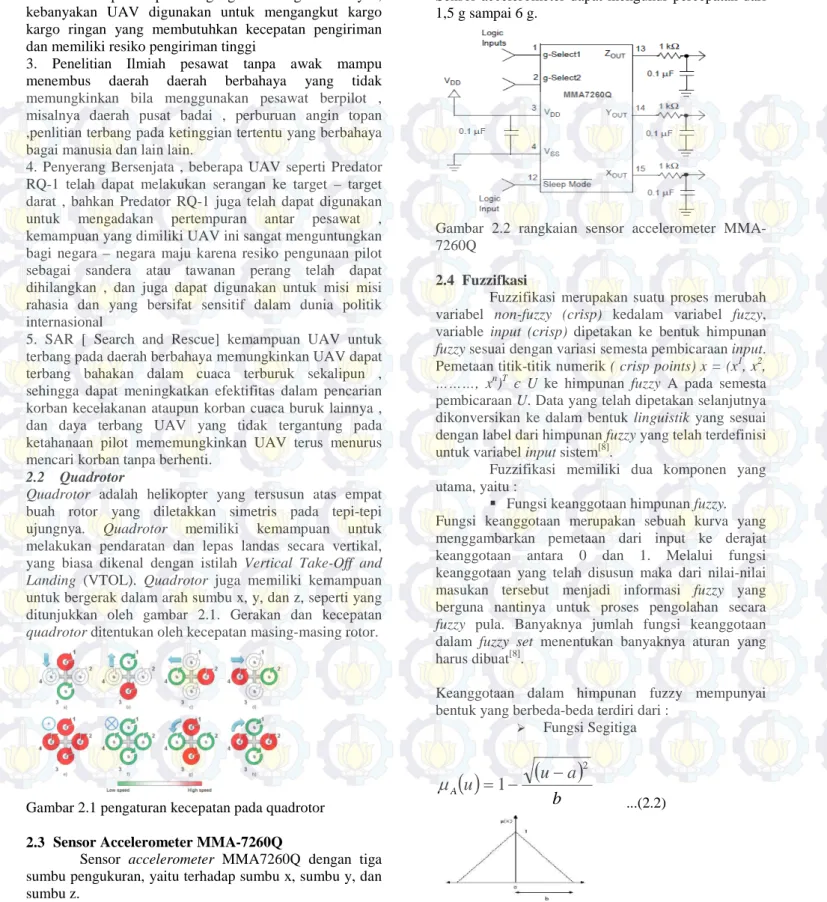
2.3 Sensor Accelerometer MMA-7260Q
Sensor accelerometer MMA7260Q dengan tiga sumbu pengukuran, yaitu terhadap sumbu x, sumbu y, dan sumbu z.
Sensor accelerometer ini digunakan untuk mengukur percepatan benda dalam satuan gravitasi (g).Untuk memperoleh data jarak dari sensor accelerometer, diperlukan proses integral ganda terhadap keluaran sensor.
Persamaan untuk mendapatkan posisi dapat dilihat pada persamaan berikut,
s =∫(∫(a)dt)dt ... pers.2.1
Sensor accelerometer dapat mengukur percepatan dari 1,5 g sampai 6 g.
Gambar 2.2 rangkaian sensor accelerometer MMA-7260Q
2.4 Fuzzifkasi
Fuzzifikasi merupakan suatu proses merubah variabel non-fuzzy (crisp) kedalam variabel fuzzy, variable input (crisp) dipetakan ke bentuk himpunan
fuzzy sesuai dengan variasi semesta pembicaraan input.
Pemetaan titik-titik numerik ( crisp points) x = (x1, x2, ………, xn)T є U ke himpunan fuzzy A pada semesta
pembicaraan U. Data yang telah dipetakan selanjutnya dikonversikan ke dalam bentuk linguistik yang sesuai dengan label dari himpunan fuzzy yang telah terdefinisi untuk variabel input sistem[8].
Fuzzifikasi memiliki dua komponen yang utama, yaitu :
Fungsi keanggotaan himpunan fuzzy. Fungsi keanggotaan merupakan sebuah kurva yang menggambarkan pemetaan dari input ke derajat keanggotaan antara 0 dan 1. Melalui fungsi keanggotaan yang telah disusun maka dari nilai-nilai masukan tersebut menjadi informasi fuzzy yang berguna nantinya untuk proses pengolahan secara
fuzzy pula. Banyaknya jumlah fungsi keanggotaan
dalam fuzzy set menentukan banyaknya aturan yang harus dibuat[8].
Keanggotaan dalam himpunan fuzzy mempunyai bentuk yang berbeda-beda terdiri dari :
Fungsi Segitiga
( )
(
)
b
a
u
u
A 21
−
−
=
µ
...(2.2) Trapesium
≤
−
≤
−
−
≤
−
≥
=
b
a
u
b
b
a
u
a
b
a
u
u
A)
(
2
...;
)
(
2
2
)
(
0
...;
...
...
1
)
(
2µ
...(2.3)Gambar 2.4 Bentuk Fungsi keanggotaan Trapesium[8] Label.
Didalam Fuzzy set tentunya memiliki beberapa fungsi keanggotaan, jumlah dari keanggotaan inipun disesuaikan dengan banyaknya kebutuhan. Setiap fungsi keanggotaan dapat didefinisikan dengan label atau nama. Dapat dinyatakan dengan besar, sedang, kecil atau sesuai dengan keinginan[8].
2.5 Rule Base
Basis pengetahuan terdiri dari fakta (Data Base), dan kaidah atur (Rule Base). Fakta merupakan bagian pengetahuan yang memuat informasi tentang objek, peristiwa, atau situasi. Fakta umumnya menyatakan kondisi statik dari suatu objek. Sedangkan kaidah (Rule
base) berisi informasi tentang cara membangkitkan fakta
baru atau hipotesa fakta yang sudah ada[8]. Basis Data (Data Base).
Basis data berfungsi untuk mendefinisikan himpunan-himpunan fuzzy dari sinyal masukan dan sinyal keluaran agar dapat digunakan oleh variabel linguistik dalam basis aturan. Dalam pendefinisian tersebut biasanya dilakukan secara subjektif dengan menggunakan pendekatan heuristik dan didasarkan pada pengalaman dan pertimbangan yang menyangkut kerekayasaan, sehingga bergantung penuh pada perancang.
Kaidah Atur (Rule Base).
Kaidah atur dalam fuzzy ini biasanya tersusun dengan pernyataan :
IF (antecedent) THEN (consequent) atau dapat juga IF x is A THEN y is B.
Antecedent : berisi himpunan fakta input (sebab). Consequent : berisi himpunan fakta output (akibat). IF … THEN … dalam logika fuzzy akan melakukan
pemetaan dari himpunan fuzzy input kehimpunan fuzzy
output[8].
2.6 Logika Pengambil Keputusan
Sering pula disebut sebagai Fuzzy Inference
system (FIS) merupakan bagian terpenting dalam logika fuzzy. Langkah yang dilakukan pada tahap ini yaitu
mengevaluasi aturan, dimana mengevaluasi aturan mempunyai arti yaitu logika fuzzy mengolah dan menyimpulkan proses yang tersusun dari rule IF...THEN, setiap rule menghasilkan satu output. Pada dasarnya satu
rule akan aktif apabila kondisi input memenuhi aturan
pernyataan IF. Pengaktifan aturan pernyataan IF menghasilkan output kontrol yang didasarkan pada aturan pernyataan THEN. Dalam sistem fuzzy digunakan banyak rule yang menyatakan satu atau lebih pernyataan IF. Suatu rule dapat pula mempunyai beberapa kondisi input, yang satu sama lainya dihubungkan dengan AND atau OR untuk mendapatkan rule output[8].
2.7 Defuzzifikasi
Defuzzifikasi merupakan proses merubah
output fuzzy dari FIS (fuzzy inference system) menjadi output crips. Bentuk umum proses defuzzifikasi
diyatakan dengan:
Z0 = defuzzier (z) …(2.4)
dimana z adalah aksi pengendalian fuzzy, Z0 adalah
aksi pengendali crisp, dan defuzzifier adalah operator defuzzifikasi.
Terdapat beberapa macam metode defuzzifikasi, yaitu :
Metode Titik Pusat (Center Of Area, COA).
Metode ini membagi dua momen pertama fungsi keanggotaan, dan harga v0 yang menandai garis
pembagi adalah harga V yang ter-defuzzifikasi. Secara algoritmik dinyatakan [8]:
∫
∫
=
v v v vdv
v
dv
v
v
v
)
(
)
(
0µ
µ
…(2.5)Sedangkan dalam semesta diskrit dapat dinyatakan :
∑
∑
= ==
m k k v m k k v kv
v
v
v
1 1 0)
(
)
(
µ
µ
…(2.6) Metode Rata-rata Maksimum (Midle Of Maximum, MOM).
Merupakan metode defuzzifikasi yang merepresentasikan nilai tengah dari keluaran yang fungsi anggotanya maximum. Fungsinya ditunjukkan sebagai:
∑
==
n il
i
z
z
10
…(2.7)Dimana zi adalah nilai pendukung dengan fungsi
keanggotaan bernilai maximum dan l adalah banyaknya nilai pendukung[8].
Perkembangan logika fuzzy hingga saat ini terdapat beberapa jenis. Diantaranya adalah:
Logika Fuzzy Murni
Merupakan logika fuzzy dimana input-nya berupa
linguistik dan output-nya linguistik pula. Kaidah fuzzy
If Input x1 is F1 and Input x2 is F2, then Output y is G.
Logika Fuzzy Mamdani
Merupakan logika fuzzy dimana input-nya berupa Numerik dan output-nya Numerik pula.
Logika Fuzzy Takagi-Sugeno
Merupakan logika fuzzy dimana masukannya berupa linguistik dan keluarannya numerik. Kaidah fuzzy dari tipe ini dapat dinyatakan :
L(l) : IF x1 is F11 and … and xn is Fn1, THEN Y1 = c01 +
c11x1 + cn1 xn
………..…pers.(2.8)
4. Metodologi Penelitian
3.1. Perancangan Perangkat Keras (Hardware) 3.1.1 Pembuatan UAV quadrotor
Bentuk quadrotor yang dibuat untuk tugas akhir ini dapat dilihat pada gambar berikut,
Gambar 3.1 plant quadrotor
Plant Quadrotor UAV, ini merupakan desain dari quadrotor nantinya, quadrotor ini terdiri dari empat rotor
untuk menjaga kondisi quadrotor agar stabil selama terbang, rotor pada bagian tengah nya digunakan untuk
maneuvering baik maju dan mundur. Nantinya semua
rangkaian elektriknya di hubungkan melalui kabel yang langsung ke hardware quadrotornya.
3.1.2 Sensor Accelerometer MMA-7260
Accelerometer merupakan sensor percepatan, dengan keluaran berupa tegangan per gravitasi bumi (mV/g). Sensor accelerometer mengukur percepatan akibat gerakan benda yang melekat padanya. Pada saat diam percepatan suatu benda nol (tegangan accelerometer nol), ketika digerakkan percepatan positif (tegangan accelerometer relatif positsif dibandingkan tegangan offsetnya) dan kemudian negatif (tegangan accelerometer relatif negatif dibandingkan tegangan offset-nya), sehingga pada saat berhenti percepatannya kembali nol. Pada gerak tersebut, kecepatan suatu benda bertambah dan kemudian berkurang dan akhirnya menjadi nol saat berhenti.Perancangan perangkat keras pada Tugas Akhir ini meliputi perancangan sistem minimum mikrokontroler ATmega8535 dan perancangan sensor accelerometer MMA-7260Q. Secara umum perancangan perangkat keras dapat dilihat pada gambar berikut,
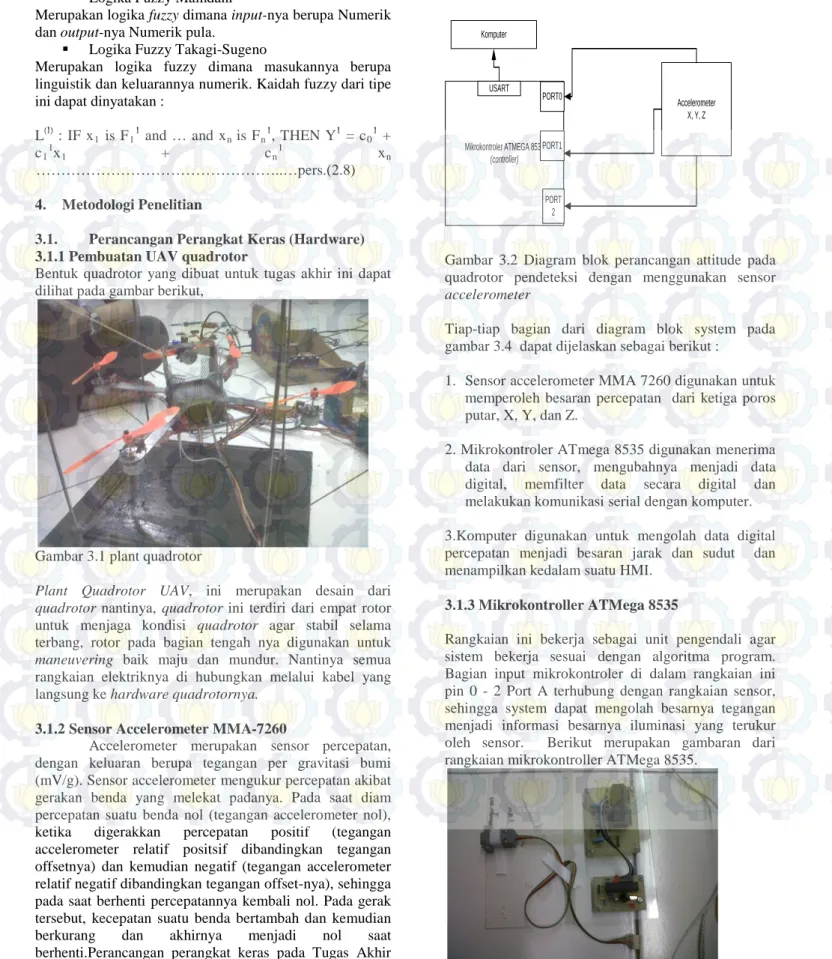
Komputer Accelerometer X, Y, Z Mikrokontroler ATMEGA 8535 (controller) PORT1 PORT 2 USART PORT0
Gambar 3.2 Diagram blok perancangan attitude pada quadrotor pendeteksi dengan menggunakan sensor
accelerometer
Tiap-tiap bagian dari diagram blok system pada gambar 3.4 dapat dijelaskan sebagai berikut :
1. Sensor accelerometer MMA 7260 digunakan untuk memperoleh besaran percepatan dari ketiga poros putar, X, Y, dan Z.
2. Mikrokontroler ATmega 8535 digunakan menerima data dari sensor, mengubahnya menjadi data digital, memfilter data secara digital dan melakukan komunikasi serial dengan komputer. 3.Komputer digunakan untuk mengolah data digital percepatan menjadi besaran jarak dan sudut dan menampilkan kedalam suatu HMI.
3.1.3 Mikrokontroller ATMega 8535
Rangkaian ini bekerja sebagai unit pengendali agar sistem bekerja sesuai dengan algoritma program. Bagian input mikrokontroler di dalam rangkaian ini pin 0 - 2 Port A terhubung dengan rangkaian sensor, sehingga system dapat mengolah besarnya tegangan menjadi informasi besarnya iluminasi yang terukur oleh sensor. Berikut merupakan gambaran dari rangkaian mikrokontroller ATMega 8535.
3.2 Perancangan Perangkat Lunak (Software)
3.2.1 Perancangan simulasi control attitude dengan menggunakan software Visual Basic.
Berikut merupakan tampilan dari HMI dari hasil keluaran sensor dan juga program fuzzy logic. Dari HMI ini ditampilkan nilai keluaran dari sensor accelerometer MMA-7260 yang berupa nilai dari sumbu X, Y, dan Z dan juga grafik dari ketiga sumbu tersebut. Pada HMI ini juga akan ditampilkan hasil dari proses pengendalian fuzzy logic dari attitude quadrotor untuk nantinya hasil fuzzy logic ini digunakan sebagai inputan untuk masing-masing motor.
Gambar 3.4 HMI control attitude
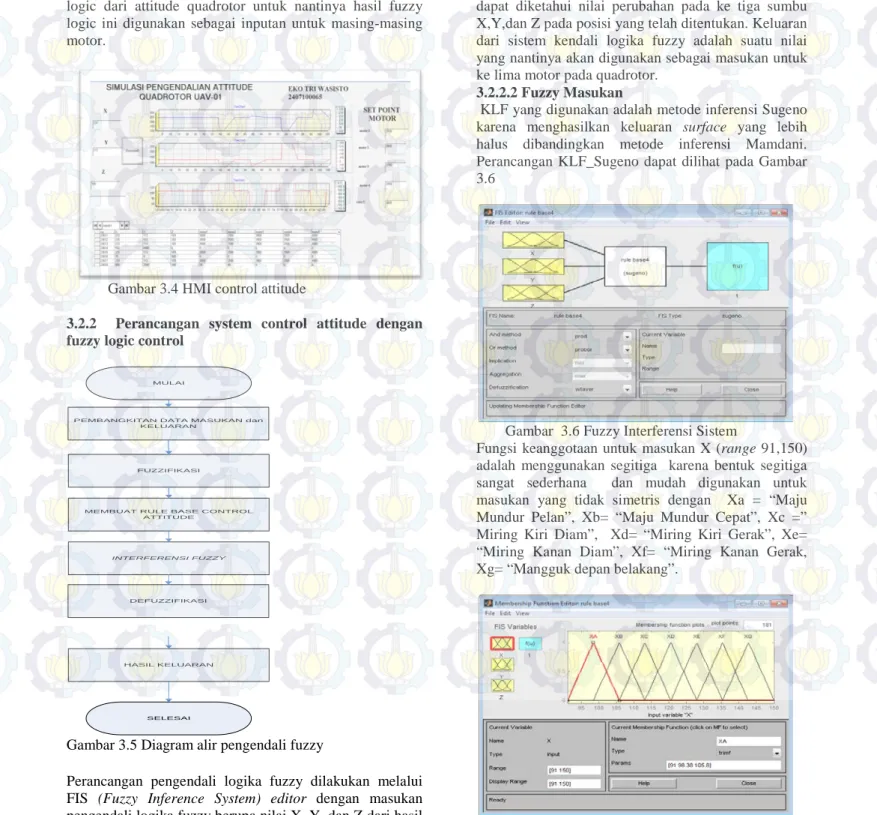
3.2.2 Perancangan system control attitude dengan fuzzy logic control
MULAI
PEMBANGKITAN DATA MASUKAN dan KELUARAN
FUZZIFIKASI
MEMBUAT RULE BASE CONTROL ATTITUDE
INTERFERENSI FUZZY
HASIL KELUARAN
SELESAI DEFUZZIFIKASI
Gambar 3.5 Diagram alir pengendali fuzzy
Perancangan pengendali logika fuzzy dilakukan melalui FIS (Fuzzy Inference System) editor dengan masukan pengendali logika fuzzy berupa nilai X, Y, dan Z dari hasil keluaran sensor yang diambil dari posisi yang telah ditentukan . Keluaran berupa suatu nilai yang nantinya menjadi set point untuk ke lima motor pada quadrotor. Metode pengambilan keputusan pada penelitian tugas
akhir ini menggunakan metode inferensi (Logika Fuzzy Sugeno) yang dalam aturannya menggunakan aturan operasi Sugeno, dan defuzzifikasi SUM atau penjumlahan. Pada Gambar 3.8 diperlihatkan diagram alir kontroler logika fuzzy.
3.2.2.1Proses Fuzzifikasi
Sistem Pengendalian logika fuzzy KLF memiliki masukan adalah nilai X, Y, dan Z dari sensor accelerometer. Menggunakan sensor accelerometer ini dapat diketahui nilai perubahan pada ke tiga sumbu X,Y,dan Z pada posisi yang telah ditentukan. Keluaran dari sistem kendali logika fuzzy adalah suatu nilai yang nantinya akan digunakan sebagai masukan untuk ke lima motor pada quadrotor.
3.2.2.2 Fuzzy Masukan
KLF yang digunakan adalah metode inferensi Sugeno karena menghasilkan keluaran surface yang lebih halus dibandingkan metode inferensi Mamdani. Perancangan KLF_Sugeno dapat dilihat pada Gambar 3.6
Gambar 3.6 Fuzzy Interferensi Sistem
Fungsi keanggotaan untuk masukan X (range 91,150) adalah menggunakan segitiga karena bentuk segitiga sangat sederhana dan mudah digunakan untuk masukan yang tidak simetris dengan Xa = “Maju Mundur Pelan”, Xb= “Maju Mundur Cepat”, Xc =” Miring Kiri Diam”, Xd= “Miring Kiri Gerak”, Xe= “Miring Kanan Diam”, Xf= “Miring Kanan Gerak, Xg= “Mangguk depan belakang”.
Gambar 3.9 Membership Function dari input X Fungsi keanggotaan untuk masukan Y (range 80,140) adalah menggunakan segitiga karena bentuk segitiga sangat sederhana dan mudah digunakan untuk masukan yang tidak simetris dengan YK1 = “Maju
Mundur Pelan”, YK2= “Maju Mundur Cepat”, YK3 =” Miring Kiri Diam”, YK4= “Miring Kiri Gerak”, YK5= “Miring Kanan Diam”, YK7= “Miring Kanan Gerak, Xg= “Mangguk Depan Belakang ”.
Gambar 3.10 Membership Function dari input Y Fungsi keanggotaan untuk masukan Z (range 100,160) adalah menggunakan segitiga karena bentuk segitiga sangat sederhana dan mudah digunakan untuk masukan yang tidak simetris dengan Z6, Z7, Z8, Z9, Z10, Z11, Z12.
Gambar 3.11 Membership Function dari input Z Membership Function keluaran dari fuzzy logic yang dirancang,
MM= Maju Mundur MK=”Miring Kiri Diam” MKa= “Miring Kanan Diam” MKG= “ Miring Kiri Gerak MKaG= “Miring Kanan Gerak” MDB = “Mangguk Depan Belakang , MBDc= “Mangguk Depan Belakang Cepat”.
Gambar Membership Function dari keluaran
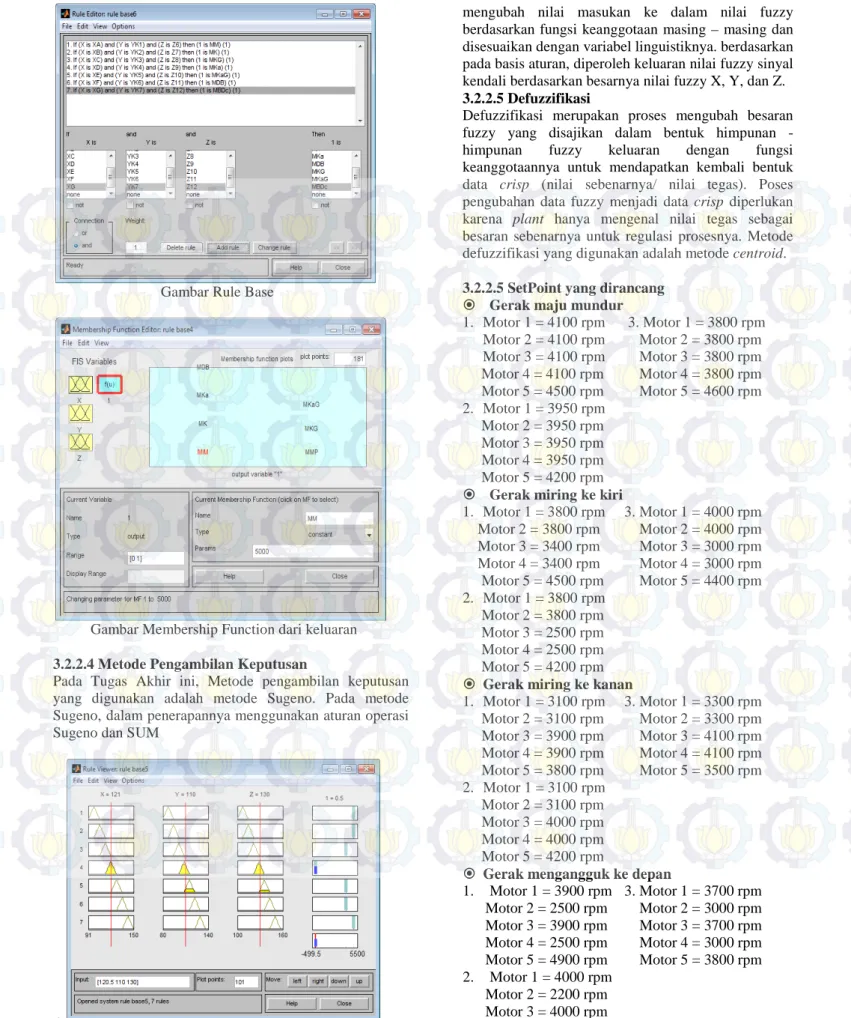
3.2.2.3 Basis Aturan ( Rule Base )
KLF memiliki basis pengetahuan yang terdiri dari basis data dan basis aturan. Basis data meliputi parameter fuzzy itu sendiri, antara lain fungsi keanggotaan, dan semesta pembicaraan himpunan fuzzy. Sedangkan basis aturan (rule base) meliputi kumpulan aturan pengendali logika fuzzy untuk menyatakan aksi pengendali agar mencapai tujuan yang diharapkan. Penyusunan basis aturan berdasarkan pengamatan pada sensor terhadap posisi yang telah kita tentukan. Pengaruh perubahan ketiga nilai dari sensor accelerometer ini yaitu nantinya akan mempengaruhi attitude pada quadrotor DF-01.
Algoritma fuzzy meliputi aturan seperti ditabelkan pada Tabel 3.1 dan dapat direpresentasikan dalam aturan berikut :
1. If (X is Xa) and (Y is YK1) and (Z is Z6) then (1 is MM) (1)
2. If (X is Xb) and (Y is YK2) and (Z is Z7) then (1 is MK) (1)
3. If (X is Xc) and (Y is YK3) and (Z is Z8) then (1 is MKG) (1)
4. If (X is Xd) and (Y is YK4) and (Z is Z9) then (1 is MKa) (1)
5. If (X is Xe) and (Y is YK5) and (Z is Z10) then (1 is MKaG) (1)
6. If (X is Xf) and (Y is YK6) and (Z is Z11) then (1 is MDB) (1)
7. If (X is Xg) and (Y is YK7) and (Z is Z12) then (1 is MDBc) (1)
Gambar Rule Base
Gambar Membership Function dari keluaran
3.2.2.4 Metode Pengambilan Keputusan
Pada Tugas Akhir ini, Metode pengambilan keputusan yang digunakan adalah metode Sugeno. Pada metode Sugeno, dalam penerapannya menggunakan aturan operasi Sugeno dan SUM
.
Proses pengambilan keputusan terjadi ketika pengendali logika fuzzy mendapat masukan nilai crisp X, Y, dan Z. Langkah awal pada proses pengambilan keputusan adalah
mengubah nilai masukan ke dalam nilai fuzzy berdasarkan fungsi keanggotaan masing – masing dan disesuaikan dengan variabel linguistiknya. berdasarkan pada basis aturan, diperoleh keluaran nilai fuzzy sinyal kendali berdasarkan besarnya nilai fuzzy X, Y, dan Z.
3.2.2.5 Defuzzifikasi
Defuzzifikasi merupakan proses mengubah besaran fuzzy yang disajikan dalam bentuk himpunan - himpunan fuzzy keluaran dengan fungsi keanggotaannya untuk mendapatkan kembali bentuk data crisp (nilai sebenarnya/ nilai tegas). Poses pengubahan data fuzzy menjadi data crisp diperlukan karena plant hanya mengenal nilai tegas sebagai besaran sebenarnya untuk regulasi prosesnya. Metode defuzzifikasi yang digunakan adalah metode centroid.
3.2.2.5 SetPoint yang dirancang
Gerak maju mundur
1. Motor 1 = 4100 rpm 3. Motor 1 = 3800 rpm Motor 2 = 4100 rpm Motor 2 = 3800 rpm Motor 3 = 4100 rpm Motor 3 = 3800 rpm Motor 4 = 4100 rpm Motor 4 = 3800 rpm Motor 5 = 4500 rpm Motor 5 = 4600 rpm 2. Motor 1 = 3950 rpm Motor 2 = 3950 rpm Motor 3 = 3950 rpm Motor 4 = 3950 rpm Motor 5 = 4200 rpm Gerak miring ke kiri
1. Motor 1 = 3800 rpm 3. Motor 1 = 4000 rpm Motor 2 = 3800 rpm Motor 2 = 4000 rpm Motor 3 = 3400 rpm Motor 3 = 3000 rpm Motor 4 = 3400 rpm Motor 4 = 3000 rpm Motor 5 = 4500 rpm Motor 5 = 4400 rpm 2. Motor 1 = 3800 rpm Motor 2 = 3800 rpm Motor 3 = 2500 rpm Motor 4 = 2500 rpm Motor 5 = 4200 rpm Gerak miring ke kanan
1. Motor 1 = 3100 rpm 3. Motor 1 = 3300 rpm Motor 2 = 3100 rpm Motor 2 = 3300 rpm Motor 3 = 3900 rpm Motor 3 = 4100 rpm Motor 4 = 3900 rpm Motor 4 = 4100 rpm Motor 5 = 3800 rpm Motor 5 = 3500 rpm 2. Motor 1 = 3100 rpm Motor 2 = 3100 rpm Motor 3 = 4000 rpm Motor 4 = 4000 rpm Motor 5 = 4200 rpm
Gerak mengangguk ke depan
1. Motor 1 = 3900 rpm 3. Motor 1 = 3700 rpm Motor 2 = 2500 rpm Motor 2 = 3000 rpm Motor 3 = 3900 rpm Motor 3 = 3700 rpm Motor 4 = 2500 rpm Motor 4 = 3000 rpm Motor 5 = 4900 rpm Motor 5 = 3800 rpm 2. Motor 1 = 4000 rpm Motor 2 = 2200 rpm Motor 3 = 4000 rpm Motor 4 = 2200 rpm Motor 5 = 4000 rpm
Gerak mengangguk ke belakang 1. Motor 1 = 3200 rpm 3. Motor 1 = 3300 rpm Motor 2 = 4000 rpm Motor 2 = 4100 rpm Motor 3 = 3200 rpm Motor 3 = 3300 rpm Motor 4 = 4000 rpm Motor 4 = 4100 rpm Motor 5 = 4200 rpm Motor 5 = 4400 rpm 2. Motor 1 = 3000 rpm Motor 2 = 3900 rpm Motor 3 = 3000 rpm Motor 4 = 3900 rpm Motor 5 = 4000 rpm
4.ANALISA DATA DAN PEMBAHASAN
4.1 Pengambilan Data dan Respon Sistem pada Attitude Quadrotor
Pada tahap ini diperoleh beberapa data tegangan offset, nilai keluaran dari system attitude quadrotor UAV yaitu sensor accelerometer MMA-7260 dari berbagai posisi yang telah ditentukan
4.1.1 Data Tegangan Offset pada Sensor Accelerometer MMA-7260
Pada pengujian karakteristik accelerometer MMA7260Q dilakukan pengujian tegangan offset dan pengujian respon keluaran sensor. Pengujian tegangan offset dilakukan dengan cara mengukur tegangan offset menggunakan multimeter.
Tabel 4.1 Tabel pengukuran Voffset
No Voffset sumbu X Voffset sumbu Y Voffset sumbu Z 1 1.4 0.6 0.8 2 1.1 0.8 0.7 3 1.2 0.9 1.0 4 1.3 0.8 1.1 5 1.4 0.9 0.9 6 1.2 0.6 0.8 7 1.1 0.8 0.6 8 1.3 0.9 0.9 9 1.4 0.7 1.1 10 1.3 0.8 1.0 Rata-rata 1.27 0.78 0.89
Dari Tabel di atas dapat dilihat bahwa tegangan offset rata-rata untuk sumbu x sebesar 1,27, sumbu y sebesar 0,78 dan sumbu z sebesar 0.89. Pengujian tegangan offset sumbu z dilakukan tanpa adanya pengaruh grafitasi. Tegangan offset rata-rata sumbu x dan sumbu z tidak sesuai dengan tegangan offset ideal yaitu sebesar 1,61 volt, pada sumbu x ada selisih sekitar 0.34 dan pada sumbu y sekitar 0.83 sedangkan pada sumbu z terdapat selisih tegangan dengan tegangan offset ideal yaitu sebesar 0,72 V.
4.1.2 Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Maju Mundur.
Pada saat posisi quadrotor maju mundur, di dapatkan data yang dapat dilihat pada lampiran dan respon yang dihasilkan sebagai berikut,
Gambar 4.1 Respon sensor Accelerometer dari ketiga sumbu saat posisi maju mundur, (a) sumbu X, (b) sumbu Y,(c) sumbu Z, dan gabungan ketiga sumbu.
4.1.3 Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Miring ke kiri.
Pada saat posisi quadrotor miring ke kiri, di dapatkan data yang dapat dilihat pada lampiran dan respon yang dihasilkan sebagai berikut, 90 95 100 105 0 20 40 60 80 per cep at an (g ) waktu (t second)
X
Gambar 4.2 Respon sensor Accelerometer dari ketiga sumbu saat posisi miring kiri, (a) sumbu X, (b) sumbu Y,(c) sumbu Z, dan gabungan ketiga sumbu.
4.1.4 Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Miring ke kanan.
Pada saat posisi quadrotor miring ke kanan, di dapatkan data yang dapat dilihat pada lampiran dan respon yang dihasilkan sebagai berikut,
Gambar 4.3 Respon sensor Accelerometer dari ketiga sumbu saat posisi miring kanan, (a) sumbu X, (b) sumbu Y,(c) sumbu Z, dan gabungan ketiga sumbu.
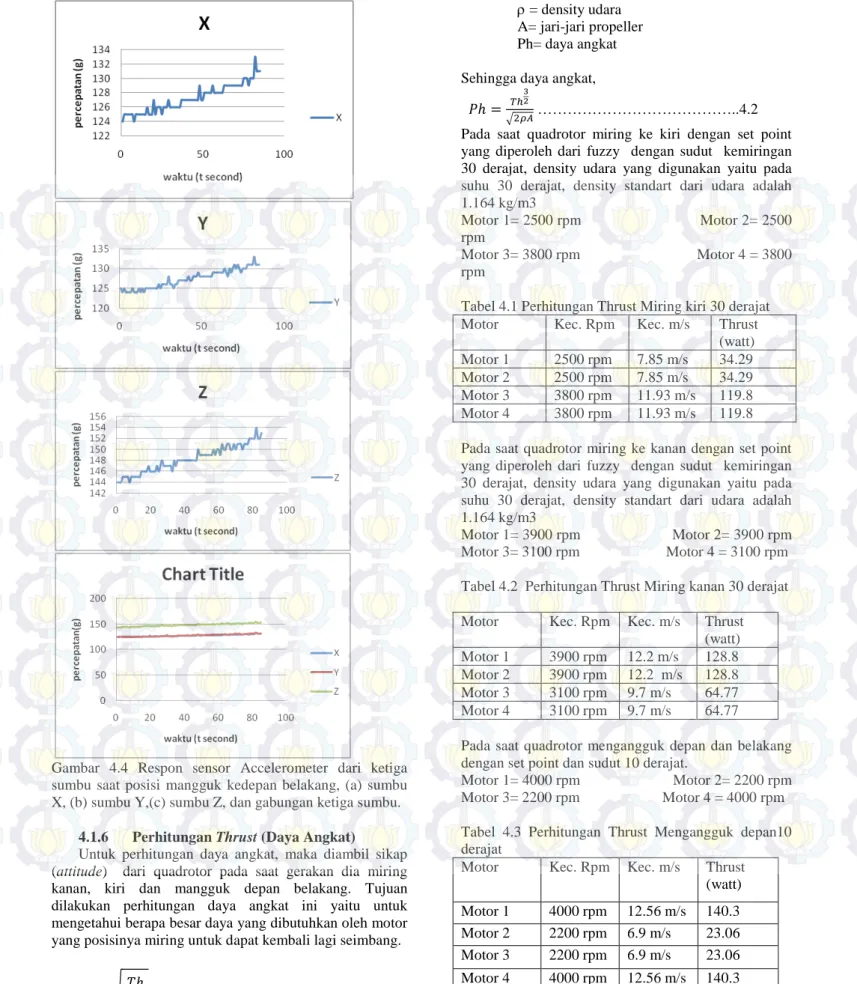
4.1.5 Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Manggguk ke depan ke belakang
Pada saat posisi quadrotor mangguk ke depan ke belakang ke kiri, di dapatkan data yang dapat dilihat pada lampiran dan respon yang dihasilkan sebagai berikut,
Gambar 4.4 Respon sensor Accelerometer dari ketiga sumbu saat posisi mangguk kedepan belakang, (a) sumbu X, (b) sumbu Y,(c) sumbu Z, dan gabungan ketiga sumbu.
4.1.6 Perhitungan Thrust (Daya Angkat)
Untuk perhitungan daya angkat, maka diambil sikap (attitude) dari quadrotor pada saat gerakan dia miring kanan, kiri dan mangguk depan belakang. Tujuan dilakukan perhitungan daya angkat ini yaitu untuk mengetahui berapa besar daya yang dibutuhkan oleh motor yang posisinya miring untuk dapat kembali lagi seimbang. 𝑉ℎ = �2𝜌𝐴𝑇ℎ … … … 𝑝𝑒𝑟𝑠. 4.1 Dimana : Vh = kecepatan rotor Th = thrust ρ = density udara A= jari-jari propeller Ph= daya angkat Sehingga daya angkat, 𝑃ℎ = 𝑇ℎ
3 2
�2𝜌𝐴 ………..4.2
Pada saat quadrotor miring ke kiri dengan set point yang diperoleh dari fuzzy dengan sudut kemiringan 30 derajat, density udara yang digunakan yaitu pada suhu 30 derajat, density standart dari udara adalah 1.164 kg/m3
Motor 1= 2500 rpm Motor 2= 2500 rpm
Motor 3= 3800 rpm Motor 4 = 3800 rpm
Tabel 4.1 Perhitungan Thrust Miring kiri 30 derajat Motor Kec. Rpm Kec. m/s Thrust
(watt) Motor 1 2500 rpm 7.85 m/s 34.29 Motor 2 2500 rpm 7.85 m/s 34.29 Motor 3 3800 rpm 11.93 m/s 119.8 Motor 4 3800 rpm 11.93 m/s 119.8 Pada saat quadrotor miring ke kanan dengan set point yang diperoleh dari fuzzy dengan sudut kemiringan 30 derajat, density udara yang digunakan yaitu pada suhu 30 derajat, density standart dari udara adalah 1.164 kg/m3
Motor 1= 3900 rpm Motor 2= 3900 rpm Motor 3= 3100 rpm Motor 4 = 3100 rpm Tabel 4.2 Perhitungan Thrust Miring kanan 30 derajat Motor Kec. Rpm Kec. m/s Thrust
(watt) Motor 1 3900 rpm 12.2 m/s 128.8 Motor 2 3900 rpm 12.2 m/s 128.8 Motor 3 3100 rpm 9.7 m/s 64.77 Motor 4 3100 rpm 9.7 m/s 64.77
Pada saat quadrotor mengangguk depan dan belakang dengan set point dan sudut 10 derajat.
Motor 1= 4000 rpm Motor 2= 2200 rpm Motor 3= 2200 rpm Motor 4 = 4000 rpm Tabel 4.3 Perhitungan Thrust Mengangguk depan10 derajat
Motor Kec. Rpm Kec. m/s Thrust (watt) Motor 1 4000 rpm 12.56 m/s 140.3 Motor 2 2200 rpm 6.9 m/s 23.06 Motor 3 2200 rpm 6.9 m/s 23.06 Motor 4 4000 rpm 12.56 m/s 140.3
4.1.7 Integrasi
Respon setpoint vs motor
Motor 1 Motor 2 3700 3800 3900 4000 4100 4200 0 20 40 ke c. mo to r ( rp m) waktu (s)
Maju Mundur
setpoint motor1 3750 3800 3850 3900 3950 4000 4050 0 20 40 ke c. mo to r ( rp m) waktu (s)Miring Kanan
motor1 setpoint 3050 3100 3150 3200 3250 3300 3350 0 20 40 ke c. M ot or ( rp m) waktu (s)Miring Kiri
setpoint motor1 3600 3700 3800 3900 4000 4100 0 20 40 ke c. mo to r ( rp m) waktu (s)Mengangguk ke depan
setpoint motor1 3000 3200 3400 3600 0 20 40 ke c. mo to r ( rp m) waktu (s)Mengangguk ke
belakang
setpoint motor1 3700 3800 3900 4000 4100 4200 0 20 40 ke c. mo to r ( rp m) waktu (s)maju mundur
setpoint motor1 3750 3800 3850 3900 3950 4000 4050 0 20 40 ke c. mo to r ( rp m) waktu (s)Miring Kanan
motor1 setpoint Motor 3 3050 3100 3150 3200 3250 3300 3350 0 20 40 ke c. mo to r ( rp m) waktu (s)
Miring kiri
setpoint motor1 0 1000 2000 3000 4000 0 20 40 ke c. mo to r ( rp m) waktu (s)Mengangguk ke depan
setpoint motor1 3800 3900 4000 4100 4200 0 20 40 ke c. mo to r ( rp m) waktu (s)Mengangguk ke
belakang
setpoint motor1 3700 3800 3900 4000 4100 4200 0 20 40 ke c. mo to r ( rp m) waktu (s)maju mundur
setpoint motor1 0 1000 2000 3000 4000 0 20 40 ke c. mo to r ( rp m) waktu (s)miring kanan
motor1 setpoint 3850 3900 3950 4000 4050 4100 4150 0 20 40 ke c. mo to r ( rp m) waktu (s)miring kiri
setpoint motor1 3600 3700 3800 3900 4000 4100 0 20 40 ke c. mo to r ( rp m) waktu (s)mengangguk ke depan
setpoint motor1 3100 3200 3300 3400 3500 3600 0 20 40 ke c. mo to r ( rp m) waktu (s)mengangguk ke
belakang
setpoint motor1 Motor 4 Motor 5 3700 3800 3900 4000 4100 4200 0 20 40 ke c. mo to r ( rp m) waktu (s)
maju mundur
setpoint motor1 0 1000 2000 3000 4000 0 20 40 ke c. mo to r ( rp m) waktu (s)miring kanan
motor1 setpoint 3800 3900 4000 4100 4200 0 20 40 ke c. mo to r ( rp m) waktu (s)miring kiri
setpoint motor1 0 2000 4000 0 20 40 ke c. mo to r ( rp m) waktu (s)mengangguk ke depan
setpoint motor1 3800 3900 4000 4100 4200 0 20 40 ke c. mo to r ( rp m) waktu (s)mengangguk ke
belakang
setpoint motor1 0 2000 4000 6000 0 20 40 ke c. mo to r ( rp m) waktu (s)maju mundur
setpoint motor1 0 2000 4000 6000 0 20 40 ke c. mo to r ( rp m) waktu (s)miring kanan
motor1 setpoint 0 2000 4000 6000 0 20 40 ke c. mo to r ( rp m) waktu (s)miring kiri
setpoint motor15.1 Kesimpulan
1 Attitude (sikap) quadrotor dapat dikendalikan dengan metode fuzzy logic.
2 Didapatkan 7 rules base untuk mengontrol attitude quadrotor.
3 Rules base yang pertama yaitu menghasilkan setpoint untuk gerakan quadrotor maju mundur, dengan setpoint motor yang dihasilkan adalah untuk m1= 4100 rpm, m2= 4100 rpm, m3= 4100 rpm, m4= 4100 rpm, dan m5= 4500 rpm. Rules base yang kedua untuk gerakan quadrotor ke arah kiri yaitu m1= 3800 rpm, m2=3800 rpm, m3= 3400 rpm, m4= 3400 rpm dan m5= 4500 rpm. Rules base yang ketiga untuk gerakan quadrotor ke kanan menghasilkan setpoint untuk m1= 3100 rpm, m2=3100 rpm, m3=3900 rpm, m4=3900 rpm, dan m5= 3800 rpm. Dan rules base yang keempat untuk gerakan mengangguk ke depan menghasilkan setpoint m1=3900 rpm, m2=2500 rpm, m3=3900 rpm, m4= 2500 rpm dan m5=4900 rpm. Dan rules base yang ke lima untuk gerakan quadrotor mengangguk ke belakang m1= 3200rpm, m2= 4000 rpm , m3= 3200 rpm, m4= 4000 rpm dan m5= 4200 rpm.
DAFTAR PUSTAKA
[1] Seifert, K. dan Camacho, O.,“Implementing Positioning Algorithms Using Accelerometers”, Freescale Semiconductor, 2007.
[2] Netika Purwaningrum.2007, APLIKASI FUZZY
LOGIC UNTUK PENGENDALI PENERANGAN
RUANGAN BERBASIS MIKROKONTROLER ATMEGA8535, JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI SEMARANG.
[3] Ruslan Gani , Wahyudi, S.T, M.T, Iwan Setiawan, S.T, M.T. 2008. Perancangan Sensor Gyroscope
dan Accelerometer Untuk Menentukan Sudut dan Jarak Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro.
[4] F. Martin McNeill and Ellen Thro. 1994.
Fuzzy Logic A Practical Approach. Academic Press
Limited. London.
[5] Hartadi, Dwi. 2006. Perancangan Sistem
Pengendalian Temperatur Menggunakan Metode Fuzzy Gain Schedulling PID Controller Pada Continous Tank Reaktor (CSTR). Surabaya. Institute
Teknologi Sepuluh Nopember. Tugas Akhir.
[6] Hendawan Soebhakti, ST. 2007. Basic AVR
Microcontroller Tutorial. Batam. Politeknik Batam.
[7] Henry Nasutin. Development of Fuzzy Logic
Control For Vehicle Air Conditioning System.
Mechanical Engineering, Bung Hatta University. [8] Satya Widodo, Nuryono. Penerapan
Multi-Mikrokontroller pada model robot mobil berbasis logika fuzi. Teknik Elektro Fakultas Teknologi
Industri, Universitas Ahmad Dahlan.
[9] ATmega 8535 Data Sheet, http://www.atmel.com, Maret 2004.
[10] ADXRS150 Data Sheet, http://www.analog.com, Maret 2004.
[11] KIA78R33API Data Sheet,
http://www.datasheetcatalog.com, Maret 2004. [12] MMA7260Q Data Sheet, http://www.freescale.com, April 2008
BIODATA PENULIS
Nama : Eko Tri Wasisto
TTL : Surabaya, 24 Maret 1989
Alamat : JL. Menanggal 3 no. 9b Surabaya Email: [email protected]
Pendidikan :
• SDN Dukuh Menanggal II/425 Surabaya (1995-2001)
• SLTPN 22 Surabaya (2001-2004) • SMAN 15 Surabaya (2004-2007)
• S-1 Teknik Fisika FTI ITS (2007-sekarang) 0 2000 4000 6000 0 20 40 ke c. mo to r ( rp m) waktu (s)
![Gambar 2.4 Bentuk Fungsi keanggotaan Trapesium [8]](https://thumb-ap.123doks.com/thumbv2/123dok/4617202.3373171/4.892.21.887.99.1014/gambar-bentuk-fungsi-keanggotaan-trapesium.webp)