BAB III
PERANCANGAN ALAT
Bab ini akan menjelaskan tentang perancangan, gambaran sistem serta realisasi
perangkat keras maupun perangkat lunak yang digunakan pada tongkat tunanetra.
3.1.
Gambaran Alat
Alat yang akan direalisasikan dalam skripsi ini adalah tongkat tunanetra yang
dapat mendeteksi adanya penghalang, lubang dan disertai dengan navigasi yang dapat
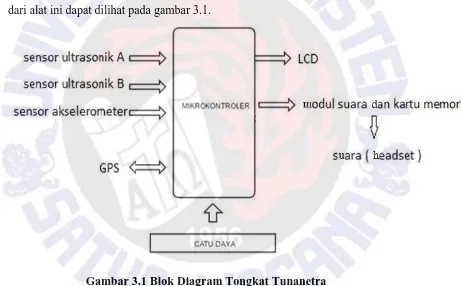
membantu orang tunanetra untuk mencapai tujuannya. Blok diagram keseluruhan sistem
dari alat ini dapat dilihat pada gambar 3.1.
Gambar 3.1 Blok Diagram Tongkat Tunanetra
Dari blok diagram dapat dilihat mikrokontroler sebagai pengendali utama yang
mana berfungsi sebagai pengolah data mentah dari modul GPS, sensor akselerometer,
sensor ultrasonik dan LCD. Modul dan sensor tersebut mendapatkan sumber tegangan 5V
dari mikrokontroler sedangkan modul suara mendapatkan sumber tenaga 3,3V dari
3.2.
Pembuatan Mekanik Tongkat Tunanetra
Mekanik tongkat tunanetra ini memiliki beberapa bagian yaitu untuk pengguna
(tunanetra),
user interfaceuntuk operator ( orang normal yang membantu menyimpan
tujuan ), mekanik untuk pendeteksi penghalang dan lubang.
Adapun realisasi pembuatan
tongkat tunanetra ini ditunjukkan oleh Gambar 3.2
–
3.5
Gambar 3.2. Tombol Pengguna
Gambar 3.4. Pendeteksi Penghalang Dan Lubang
Gambar 3.5. Mekanik Tongkat Keseluruhan
3.3.
Modul Elektronik Tongkat Tunanetra
Pada perancangan tongkat tunanetra ini terdiri dari beberapa modul elektronik
yaitu sensor ultrasonik SRF05, sensor akselerometer ADXL345, GPS dengan Itead
3.3.1. Sensor Jarak SRF05
Pada skripsi ini menggunakan 2 sensor jarak SRF05 yaitu sebagai pendeteksi
penghalang dan lubang. Pemasangan SRF05 pada tongkat tunanetra ini dapat dilihat pada
Gambar 3.4. Untuk pendeteksi penghalang diletakkan 20cm dari bawah tongkat dan
untuk pendeteksi lubang diletakkan di akrilik yang terhubung dengan tongkat sejauh
30cm dari bawah dan 30cm ke depan tongkat.
3.3.1.1. Pendeteksi Penghalang
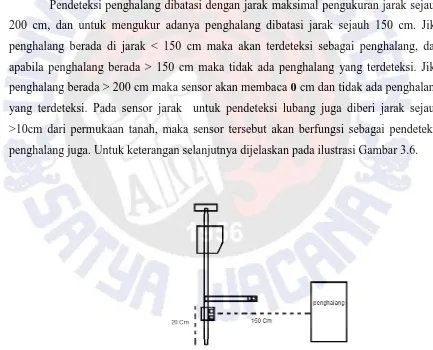
Pendeteksi penghalang dibatasi dengan jarak maksimal pengukuran jarak sejauh
200 cm, dan untuk mengukur adanya penghalang dibatasi jarak sejauh 150 cm. Jika
penghalang berada di jarak < 150 cm maka akan terdeteksi sebagai penghalang, dan
apabila penghalang berada > 150 cm maka tidak ada penghalang yang terdeteksi. Jika
penghalang berada > 200 cm maka sensor akan membaca 0 cm dan tidak ada penghalang
yang terdeteksi. Pada sensor jarak untuk pendeteksi lubang juga diberi jarak sejauh
>10cm dari permukaan tanah, maka sensor tersebut akan berfungsi sebagai pendeteksi
penghalang juga. Untuk keterangan selanjutnya dijelaskan pada ilustrasi Gambar 3.6.
3.3.1.2. Pendeteksi Lubang
Untuk pendeteksi lubang dibatasi dengan jarak maksimal pengukuran jarak
sejauh 200 cm, dan untuk mengukur adanya lubang dibatasi jarak sejauh 40 cm. Jika ada
lubang dengan kedalaman < 40 cm maka tidak terdeteksi adanya lubang, dan apabila ada
lubang di kedalaman > 40 cm maka akan terdeteksi adanya lubang. Untuk keterangan
selanjutnya dijelaskan pada ilustrasi Gambar 3.7.
Gambar 3.7. Ilustrasi Pendeteksi Lubang
3.3.2. Sensor Akselerometer ADXL345
Pada skripsi ini terdapat sensor akselerometer ADXL345 yang berfungsi untuk
mengukur sudut kemiringan tongkat. Hal ini dikarenakan tongkat yang dipegang
tunanetra akan diayun kedepan ataupun kebelakang. Dari ayunan tersebut akan
membentuk sudut yang membuat tongkat menjadi miring dan akan mengganggu kerja
dari sensor ultrasonik. Salah satu cara untuk mendapatkan data kemiringan sudut adalah
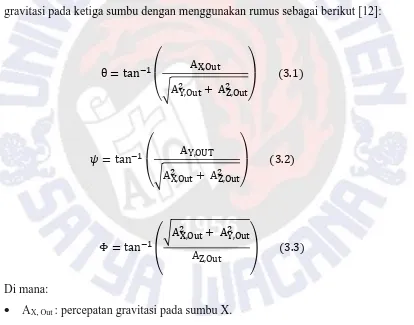
dengan mengolah data percepatan gravitasi pada ketiga sumbu sekaligus. Gambar 3.8.
Gambar 3.8. Berbagai Posisi Kemiringan Sudut Dari Sensor Akselerometer
Kemiringan sudut ,
�,
dan
dapat dihitung dengan mengolah data percepatan
gravitasi pada ketiga sumbu dengan menggunakan rumus sebagai berikut [12]:
θ = tan
−(
A
,O√A
,O+ A
,O)
.
� = tan
−(
A
,O√A
,O+ A
,O)
.
Φ = tan
−(
√A
,O+ A
,OA
,O)
.
Di mana:
A
X, Out: percepatan gravitasi pada sumbu X.
A
Y, Out: percepatan gravitasi pada sumbu Y.
A
Z, Out: percepatan gravitasi pada sumbu Z.
Pada skripsi ini akan digunakan kemiringan sudut
saja sebagai acuan
kemiringan sudut dari tongkat tunanetra ini. Karena posisi sumbu x akselerometer diatur
sesuai perubahan sudut dari tongkat tunanetra tersebut.
Sebelum dapat digunakan untuk mengukur kemiringan sudut, terlebih dahulu diuji
apakah sensitivitas akselerometer digital sama untuk setiap sumbu
x, y,dan
z. Hal ini
penting karena untuk mendapatkan data kemiringan sudut yang akurat dengan
menggunakan rumus sebelumnya, sensitivitas sensor pada setiap sumbu harus sama atau
tidak memiliki selisih yang jauh. Setelah dilakukan pengujian ternyata ditemukan bahwa
sensitifitas setiap sumbu tidak sama. Jika tidak sama, maka diperlukan kalibrasi untuk
menyamakan data setiap sumbu. Berikut adalah persamaan kalibrasinya:
=
(�
,� �− �
,��)
.
���
= �
,� �−
�.
�
,� �=
(�
,�−
���)
�
.
=
(�
,� �− �
,��)
.
���
= �
,� �−
�.
�
,� �=
(�
,�−
���)
�
.
=
(�
,� �− �
,��)
.
���
= �
,� �−
�.
�
,� �=
(�
,�−
���)
Dengan:
�
: sensitivitas sumbu X akselerometer.
�
Off:
offsetsumbu X akselerometer.
A
,Max: percepatan gravitasi maksimum pada sumbu X positif (LSB).
�
,��: percepatan gravitasi minimum pada sumbu X negatif (LSB).
�
,�: percepatan gravitasi pada sumbu X (LSB).
�
,� �: percepatan gravitasi sumbu X terkalibrasi (dalam g).
�
: Sensitifitas sumbu Y akselerometer.
�
Off:
Offsetsumbu Y akselerometer.
A
,Max: percepatan gravitasi maksimum pada sumbu Y positif (LSB).
�
,��: percepatan gravitasi minimum pada sumbu Y negatif (LSB).
�
,�: percepatan gravitasi pada sumbu Y (LSB).
�
,� �: percepatan gravitasi sumbu Y terkalibrasi (dalam g).
�
: sensitifitas sumbu Z akselerometer.
�
Off:
offsetsumbu Z akselerometer.
A
,Max: percepatan gravitasi maksimum pada sumbu Z positif (LSB).
�
,��: percepatan gravitasi minimum pada sumbu Z negatif (LSB).
�
,�: percepatan gravitasi pada sumbu Z (LSB).
�
,� �: percepatan gravitasi sumbu Z terkalibrasi (dalam g).
3.3.3. Sistem Navigasi dengan Itead Arduino GPS NEO-6 Antenna Include
Pada skripsi ini menggunakan sistem navigasi sebagai petunjuk untuk
mengarahkan tunanetra sampai tujuan. Untuk navigasi, tongkat ini menggunakan modul
GPS arduino NEO-6 antenna include. Modul GPS ini memiliki keakuratan yang cukup
baik yaitu 2,5
–
3 meter.
Pada sistem navigasi ini membutuhkan bantuan orang lain ( orang normal )
sebagai operator untuk menyimpan tujuan-tujuan yang ingin di tuju oleh tunanetra.
Untuk membuat tujuan, operator harus menyimpan beberapa
check point.
Check pointsendiri didapat dengan menyimpan yang didapat dari GPS. Adapun syarat-syarat yang
Jarak untuk menyimpan antar
Check pointharus lebih dari 3 meter.
Di setiap belokan/tikungan harus diberi
Check point.
Untuk 1 tujuan tidak dapat menyimpan lebih dari 5 titik/Check point.
Antar Check point harus lurus, agar tunanetra tidak keluar jalur.
Pada navigasi terdapat arah untuk mengarahkan tunanetra apabila salah jalan dan
sistem navigasi ini juga dapat memberikan jarak antara tunanetra dengan tujuan yang
akan dituju.
3.3.3.1. Navigasi Arah
Untuk mendapatkan arah pada navigasi digunakan logika pengurangan lintang
dan pengurangan bujur.
∆
Lintang = lintang
Check point–
lintang sekarang
∆
Bujur = bujur
Check point–
bujur sekarang
Dari hasil pengurangan lintang akan didapat Check point selanjutnya ada di utara apabila
∆
lintang bernilai positif dan selatan apabila
∆
lintang bernilai negatif. Begitu juga dengan
pengurangan bujur akan didapat Check point selanjutnya ada di timur apabila
∆
bujur
bernilai positif dan barat apabila
∆
bujur bernilai negatif. Karena dalam 1 koordinat terdiri
dari lintang dan bujur maka sebagai berikut:
∆
Lintang ( + ) dan
∆
Bujur ( + ) arahnya adalah Timur Laut.
∆
Lintang ( + ) dan
∆
Bujur ( - ) arahnya adalah Barat Laut.
∆
Lintang ( - ) dan
∆
Bujur ( + ) arahnya adalah Tenggara.
∆
Lintang ( - ) dan
∆
Bujur ( - ) arahnya adalah Barat Daya.
3.3.3.2. Navigasi Jarak
Untuk mendapatkan jarak antara tunanetra dengan tujuan dapat dianalogikan
sebagai jarak dua titik pada bola, di mana bumi dianalogikan seperti sebuah bola
berbentuk benar-benar bulat.
Persamaan umum untuk mencari jarak dua titik pada bola disebut persamaan
=
�
√ �
∅ − ∅+
∅
∅ �
� − �(3.13)
Di mana :
d : jarak perpindahan ( meter )
ϕ , ϕ
: lintang
titik 1 dan lintang titik 2
λ
, λ
: bujur
titik 1 dan bujur
titik 2
r : jari-
jari bumi (≈ 6.335,439
km )
Persamaan ini didapatkan dari pendekatan bahwa bumi bener-benar bulat padahal
pada kenyataannya bumi berbentuk elips lingkar bumi pada garis katulistiwa bernilai
(≈6.335,439 km) berbeda pada lingkar kutub bernilai (≈ 6.399,594 km) jadi rumus
haversine dan hukum cosinus tidak bisa dijamin benar untuk lebih dari 0,5%.
3.3.4. Tombol
Limit Switch, Push ButtonDan Saklar Geser
Pada skripsi ini terdapat 2 bagian tombol dan saklar yang akan digunakan yaitu
untuk pengguna ( tunanetra ) dan operator.
Tombol yang digunakan oleh pengguna adalah 3 tombol push button yang
berfungsi untuk memilih tujuan yang diinginkan ( tombol
next), tombol pilih ( tombol
select
) untuk masuk ke tujuan yang dipilih, dan tombol jarak untuk memberitahukan
jarak antara tunanetra dan tujuan. Juga terdapat 1 saklar geser yang berfungsi untuk
pengguna ingin menggunakan GPS atau sebaliknya ( dapat dilihat pada gambar 3.2 ).
Tombol yang digunakan oleh operator adalah 5 tombol
limit switchyang
berfungsi untuk menambah tujuan ( tombol
up), menghapus tujuan ( tombol
down),
kembali ke menu awal ( tombol
back), tombol untuk memilih ( tombol
select), dan
tombol menyimpan
Check point( tombol
save). Juga terdapat 1 saklar geser yang
berfungsi untuk memilih tongkat ini dipergunakan untuk operator atau untuk pengguna (
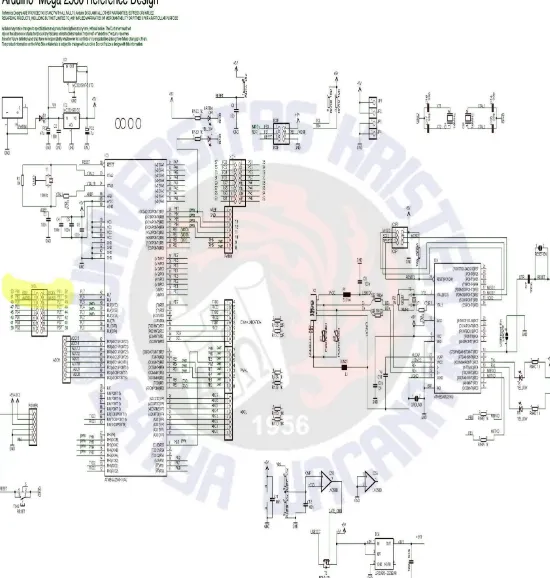
3.3.5. Mikrontroler dengan Arduino Mega 2560
Pada skripsi ini menggunakan mikrokontroler untuk mengolah data dari modul
dan sensor-sensor yang ada. Mikrokontroler yang digunakan pada skripsi ini adalah
arduino mega 2560.
Arduino Mega 2560 adalah board Arduino yang merupakan
perbaikan dari board Arduino Mega sebelumnya. Arduino Mega awalnya memakai chip
ATmega1280 dan kemudian diganti dengan chip ATmega2560, oleh karena itu namanya
diganti menjadi Arduino Mega 2560.Berikut spesifikasi Arduino Mega 2560 [ 14 ]:
Microcontroller: ATmega2560
Operating Voltage: 5V
Input Voltage (recommended): 7-12V
Input Voltage (limits): 6-20V
Digital I/O Pins: 54 (of which 14 provide PWM output)
Analog Input Pins: 16
DC Current per I/O Pin: 40 mA
DC Current for 3.3V Pin: 50 mA
Flash Memory: 256 KB of which 8 KB used by bootloader
SRAM: 8 KB
EEPROM: 4 KB
Clock Speed: 16 MHz
Tabel 3.1. Konfigurasi Penggunaan Pin Arduino Mega 2560
Nama Pin
Fungsi
Pin A0
Triger SRF05 penghalang
Pin A1
Echo SRF05 penghalang
Pin 12
Triger SRF05 lubang
Pin 11
Echo SRF05 lubang
Pin 44
RS LCD 20x4
Pin 42
EN LCD 20x4
Pin 39
D7 LCD 20x4
Pin 41
D6 LCD 20x4
Pin 43
D5 LCD 20x4
Pin 45
D4 LCD 20x4
Pin 25
Tombol pilih tujuan pengguna
Pin 29
Tombol
selectpengguna
Pin 40
Tombol jarak pengguna
Pin 24
Saklar gps/tanpa gps pengguna
Pin 23
Tombol
saveoperator
Pin 50
Tombol
upoperator
Pin 51
Tombol
downoperator
Pin 52
Tombol
selectoperator
Pin 53
Tombol
backoperator
Pin 27
Saklar memilih pengguna/operator
Pin 20
SDA ADXL345
Pin 21
SCL ADXL345
Pin 46
P04 WTV020
Pin 47
ResetWTV020
Pin 48
P06 WTV020
Pin 49
P05 WTV020
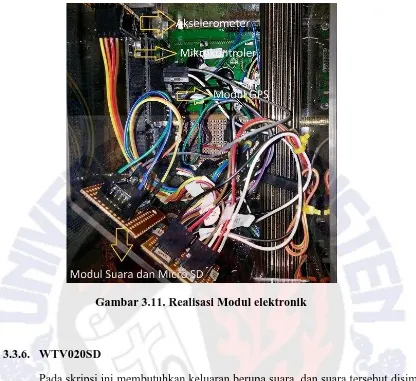
Gambar 3.11. Realisasi Modul elektronik
3.3.6. WTV020SD
Pada skripsi ini membutuhkan keluaran berupa suara, dan suara tersebut disimpan
dalam sebuah
memory card.Untuk mengeluarkan suara dan menyimpannya, digunakan
modul suara WTV020SD yang telah dilengkapi dengan
micro sd( dapat dilihat pada
gambar 2.9)
.Suara yang disimpan dalam memori harus dalam bentuk file AD4. Adapun
langkah-langkah untuk menyimpan suara sebagai berikut:
Suara yang telah direkam dalam bentuk file m4a, dan diubah terlebih dahulu dalam
bentuk wav.
Gambar 3.12. Aplikasi Audacity
Selanjutnya file tersebut diubah lagi kedalam file AD4 menggunakan aplikasi AD4
converter.
Tabel 3.2. Tabel Daftar Suara
No
Suara
1
Ada penghalang
2
Ada lubang
3
Ke kiri
4
Ke kanan
5
Sudah sampai
6
Sudah sampai check point
7
Balik arah
8
Satu
9
Dua
10
Tiga
11
Empat
12
Lima
13
Enam
14
Tujuh
15
Delapan
16
Sembilan
17
Sepuluh
18
Sebelas
19
Belas
20
Puluh
21
Meter
22
Seratus
23
Tujuan
24
Balik arah
3.4.
Perangkat Lunak Tongkat Tunanetra
Cara kerja program untuk operator dan tunanetra dijelaskan pada gambar diagram
alir 3.14 , 3.15, 3.16 dan 3.17 di bawah ini:
Gambar 3.15. Diagram Alir Perancangan Lunak untuk Tunanetra
3.4.1. Penjelasan Diagram Alir untuk Operator
Gambar 3.14 merupakan diagram alir untuk operator yaitu orang yang dapat
melakukan penyimpanan jalur, menambah tujuan dan menghapus tujuan. Pada saat ON
dihidupkan maka tongkat memiliki mode berupa saklar yang berfungsi untuk mode
operator atau langsung pakai. Pada saat memilih mode operator maka akan terdapat
pilihan untuk menambah tujuan dan menghapus tujuan. Jika memilih menambah tujuan
maka operator akan melakukan prosedur pengisian jalur yang baru. Prosedur tersebut
akan menggunakan GPS yang meng-update koordinat sekarang. Operator memiliki
tombol
saveuntuk menyimpan jalur. Apabila tidak menyimpan jalur maka GPS akan
terus meng-update koordinat, dan apabila ingin menyimpan jalur maka operator akan
menekan tombol
saveuntuk menyimpan jalur atau koordinat sebagai
check point. Jika
operator memilih menghapus jalur maka akan terdapat pilihan tujuan yang ada, setelah
operator memilih tujuan yang ingin dihapus. Apabila operator ingin menghapus tujuan
lagi maka akan kembali pilihan tujuan yang tersisa, jika tidak ingin menghapus tujuan
maka akan kembali ke tampilan menu.
3.4.2. Penjelasan Diagram Alir untuk Tunanetra
Gambar 3.15, 3.16 dan 3.17 merupakan diagram alir untuk tunanetra. Ketika ON
maka mode yang dipilih oleh tunanetra adalah langsung pakai. Setelah mode langsung
pakai dipilih pengguna tongkat ( tunanetra ) memiliki tombol GPS yang berarti pengguna
bisa memilih ingin menggunakan GPS atau tidak. Jika tidak menggunakan GPS maka
sensor akselerometer akan mengukur sudut tongkat sebagai acuan sensor ultrasonik
melakukan pengukuran. Apabila sudut berubah atau tidak sesuai dengan yang ditentukan
maka akan terdapat notifikasi suara posisi tongkat tidak benar. Jika sudut benar maka
sensor ultrasonik akan melakukan pengukuran untuk mengukur apakah ada penghalang
atau lubang. Jika tidak ada penghalang atau lubang maka akan kembali mendeteksi
penghalang atau lubang. Apabila ada penghalang ataupun lubang maka akan diberi
notifikasi berupa suara.
Apabila pengguna tongkat ( tunanetra ) menekan tombol GPS maka sistem tetap
akan melakukan pengukuran seperti tanpa GPS dan memiliki navigasi atau jalur yang
telah disimpan oleh operator. Pengguna dapat memilih beberapa tujuan yang telah
sudah ditujuan atau tidak. Jika sudah ditujuan maka akan ada notifikasi kalau sudah
ditujuan. Apabila tidak maka GPS akan mengecek
check pointselanjutnya. Jika belum
sampai check point yang di tuju, maka akan kembali mengecek
check pointdituju. Jika
telah sampai di check point yang dituju maka akan ada notifikasi kalau telah di check
point tersebut. Dan GPS akan mengecek apakah check point tersebut adalah tujuan
terakhir, jika tidak akan kembali mengecek
check pointyang selanjutnya, jika ya maka
akan mengeluarkan notifikasi bahwa telah sampai ditujuan. Terdapat tombol jarak
apabila pengguna ( tunanetra ) ingin mengetahui jaraknya dengan tujuan, maka akan