19
BAB III
PERANCANGAN ALAT
Pada bab ini akan dijelaskan perancangan alat, yaitu perancangan perangkat
keras dan perancangan perangkat lunak. Perancangan perangkat keras terdiri dari
perangkat elektronik dan instalasi perangkat keras.
3.1. Gambaran Sistem
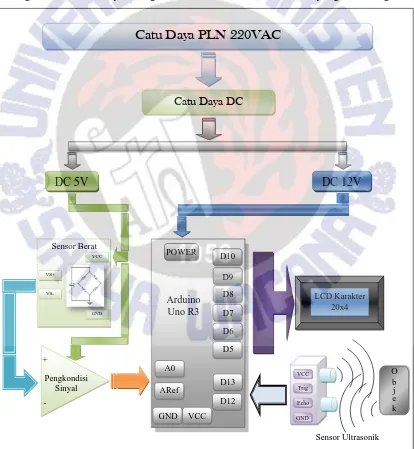
Pada gambar 3.1 menunjukkan blok diagram dari keseluruhan alat yang dibuat.
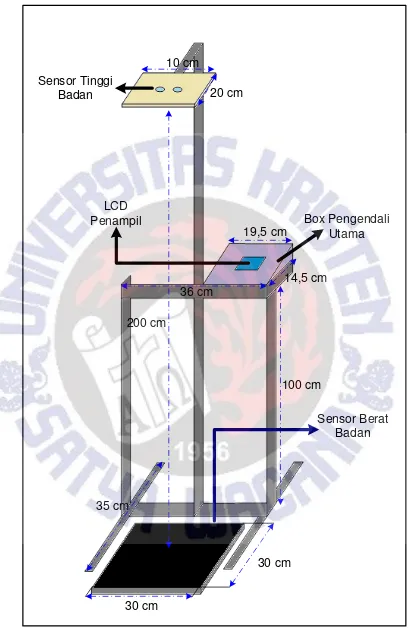
Pada gambar 3.2 menunjukkan gambaran dari keseluruhan sistem yang dirancang.
Pengkondisi
Catu Daya PLN 220VAC
POWER
VCC
20
200 cm
30 cm
30 cm
19,5 cm
14,5 cm 36 cm
100 cm
35 cm
10 cm
20 cm Sensor Tinggi
Badan
Sensor Berat Badan Box Pengendali
Utama LCD
Penampil
21
Pada gambar 3.2 untuk Box pengendali utama terdiri dari rangkaian
mikrokontroler, rangkaian driver LCD dan rangkaian pengkondisi sinyal. Untuk
dimensi atau ukuran dari alat juga dapat dilihat pada gambar tersebut.
3.2. Perancangan dan Realisasi Perangkat Keras
Pada bagian ini dijelaskan mengenai perancangan dari perangkat keras yang
dibuat. Perancangan modul timbangan digital disusun dengan komponen seperti sensor
berat strain gauge, untai penyeimbang jembatan wheatstone, rangkaian pengkondisi
sinyal sebagai rangkaian penguat sinyal sensor berat. Dan perangkat keras lainnya
seperti modul sensor tinggi, board mikrokontroler, LCD penampil maupun catu daya
yang dibutuhkan.
3.2.1 Sensor Strain Gauge
Sensor berat yang digunakan adalah strain gauge disusun dengan konfigurasi
rangkaian jembatan wheatstone. Dalam penerapannya untai jembatan wheatstone
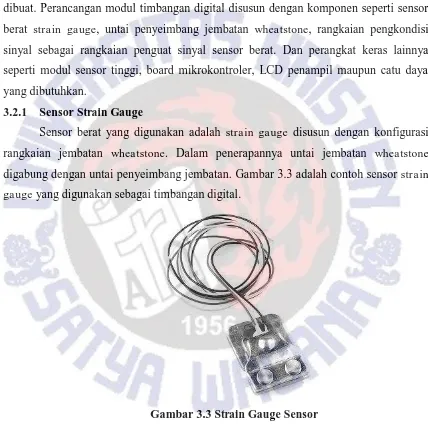
digabung dengan untai penyeimbang jembatan. Gambar 3.3 adalah contoh sensor strain
gauge yang digunakan sebagai timbangan digital.
Gambar 3.3 Strain Gauge Sensor
Sedangkan untuk konfigurasi rangkaian jembatan wheatstone
digabungkan dengan untai penyeimbang rangkaian jembatan dapat dilihat di bab
dua pada gambar 2.10. Realisasi perangkat keras untuk sensor strain gauge dan
22
Gambar 3.4 Realisasi Sensor Berat dan Untai Penyeimbang
3.2.2 Rangkaian Pengkondisi Sinyal
Tegangan keluaran dari sensor berat sebelum masuk ke pin ADC mikrokontroler
dihubungkan terlebih dahulu dengan rangkaian pengkondisi sinyal. Didalam
perancangan ini digunakan IC(Integrated Circuit) INA125P yang merupakan IC
instrumentasi yang mempunyai karakteristik[11] : Low quiescent current 460 µA
Precision Voltage Reference : 1.24V, 2.5V, 5V or 10V
Sleep Mode
Low Offset Voltage 250µV maximal
Low Offset Drift 2µV/oC maximal
Low Input Bias Current 20nA maximal
High CMRR 100dB minimal
Low noise 38nV/√ at f=1kHz Input Protection to ±40V
Wide Supply Range
Single Supply 2.7V to 36V
Dual Supply ±1.35V to ±18V
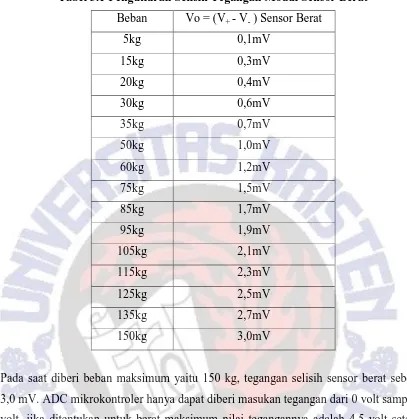
Berdasarkan hasil pengukuran didapatkan selisih tegangan pada rangkaian
23
Tabel 3.1 Pengukuran Selisih Tegangan Modul Sensor Berat Beban Vo = (V+ - V- ) Sensor Berat
3,0 mV. ADC mikrokontroler hanya dapat diberi masukan tegangan dari 0 volt sampai 5
volt, jika ditentukan untuk berat maksimum nilai tegangannya adalah 4,5 volt setelah
masuk rangkaian penguat. Maka besar penguatan yang diperlukan adalah :
(3.1)
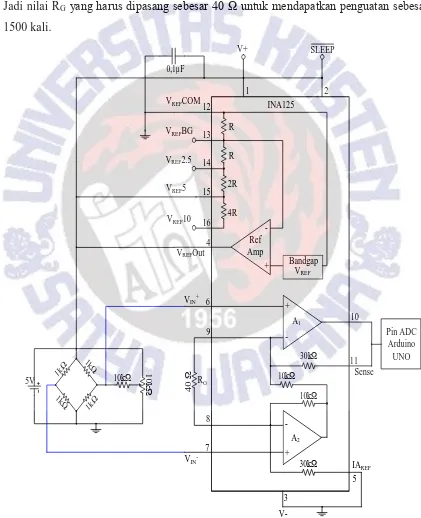
Besar penguatan IC INA125P dapat diatur sesuai dengan rumus sebagai berikut
(3.2)
Jika besar penguatan yang dibutuhkan adalah 1500 kali maka nilai RG yang harus
24
Jadi nilai RGyang harus dipasang sebesar 40 Ω untuk mendapatkan penguatan sebesar
1500 kali.
25
Gambar 3.6 Realisasi Modul Sensor Berat
3.2.3 Perancangan Modul Sensor Tinggi
Pengukur tinggi menggunakan sensor ultrasonik SRF-05 HY dengan spesifikasi
sebagai berikut :
Menghasilkan frekuensi 40kHz
Jarak Minimal 3 cm
Input Trigger 10µs minimum, TTl level pulse
Echo Pulse Positive TTL level signal, proportional to range Jarak deteksi maksimum 4m
Resolusi 1cm
Gambar 3.7 Sensor Ultrasonik SRF 05HY
Tipe sensor ini dapat digunakan dalam dua pilihan mode yaitu input trigger dan
output echo terpasang pada pin yang berbeda atau input trigger dan echo terpasang
26 Mode 1(Trigger dan Echo terpisah)
Pada mode ini untuk mengakses input dan output digunakan pin sensor yang
berbeda, artinya satu pin akan berfungsi sebagai transmitter dan satu pin sebagai
receiver. Pin trigger dan echo dibedakan. Timing diagram pada mode 1 dapat dilihat
pada gambar 3.6.
Gambar 3.8 Timing Diagram Mode 1[12] Mode 2(Trigger dan Echo dalam satu pin)
Mode ini menggunakan satu pin untuk digunakan sebagai trigger dan echo.
Untuk menggunakan mode ini, hubungkan pin no connection pada 0V atau ground.
Sinyal trigger dan echo didapat dari satu pin saja dengan delay antara sinyal trigger
dan echo kurang lebih 700us. Timing diagram pada mode 2 dapat dilihat pada
gambar 3.7.
27
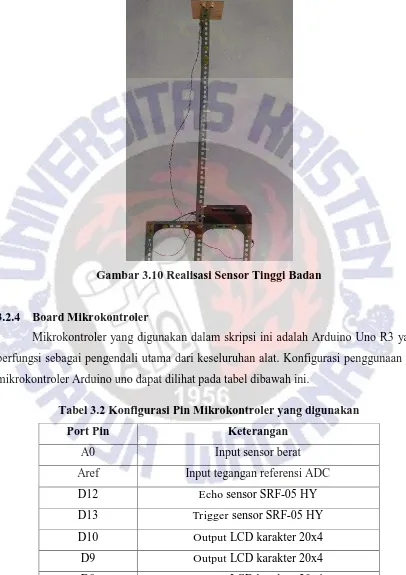
Dalam penggunaan sebagai sensor tinggi badan dipilih mode 1 yaitu pin trigger dan
echo yang terpisah.
Gambar 3.10 Realisasi Sensor Tinggi Badan
3.2.4 Board Mikrokontroler
Mikrokontroler yang digunakan dalam skripsi ini adalah Arduino Uno R3 yang
berfungsi sebagai pengendali utama dari keseluruhan alat. Konfigurasi penggunaan pin
mikrokontroler Arduino uno dapat dilihat pada tabel dibawah ini.
Tabel 3.2 Konfigurasi Pin Mikrokontroler yang digunakan
Port Pin Keterangan
A0 Input sensor berat
Aref Input tegangan referensi ADC
D12 Echo sensor SRF-05 HY
D13 Trigger sensor SRF-05 HY
D10 Output LCD karakter 20x4
D9 Output LCD karakter 20x4
D8 Output LCD karakter 20x4
28
D6 Output LCD karakter 20x4
D5 Output LCD karakter 20x4
Gambar 3.11 Mikrokontroler Arduino Uno 3.2.5 LCD Karakter
LCD karakter digunakan untuk menampilkan data tinggi, berat badan,
perhitungan BMI, dan klasifikasi BMI.
Gambar 3.12 LCD Karakter Menampilkan Data Kosong (Belum Ada Pemakai)
3.2.6 Catu Daya
Tegangan yang dihasilkan pada gambar adalah 5V dan 12V .Tegangan tinggi
AC 220 V diturunkan oleh transformator CT, keluaran tegangan dari transformator
masih tegangan bolak-bailk (AC) sehingga disearahkan dengan dioda agar menjadi
searah (DC). Setelah melewati proses penyearahan gelombang AC mejadi DC,
diberikan kapasitor C1 untuk menekan ripple yang terjadi dari proses penyearahan
gelombang AC, sehingga keluaran nya sudah murni menjadi tegangan DC yang
sempurna. Kemudian untuk memangkas tegangan menjadi 5V dan 12V maka
29
akhir C2 sebagai penstabil keluaran DC, disini kualitas gelombang searah atau DC
sudah baik dan siap digunakan untuk mensuplai rangkaian yang telah dibuat.
Gambar 3.13 Catu Daya 5V dan 12V
Gambar 3.14 Realisasi Rangkaian Catu Daya
3.2.7 Realisasi Keseluruhan Perangkat Keras Elektronik
Realisasi perangkat keras secara keseluruhan gabungan dari modul sensor berat,
sensor tinggi, rangkaian pengkondisi sinyal, mikrokontroler dan LCD penampil dapat
30 (a)
(b)
31 3.3. Perancangan Perangkat Lunak
Pada bagian ini akan dijelaskan mengenai perancangan perangkat lunak.
Perancangan perangkat lunak dijelaskan dalam diagram alir keseluruhan alat.
Ukur Tinggi Badan
Ukur Berat Badan
Hitung
Body Mass Index
Tampilkan Data
Selesai
Tidak
Apakah ada Pemakai?
Start
Inisialisasi
Ada
Kalibrasi Sensor
Sesuai?
Belum
Sudah
32
Penjelasan diagram alir program adalah sebagai berikut :
Progam langsung aktif ketika dihidupkan yang kemudian alur program menuju pada proses inisialisasi.
Saat belum ada data, sudah ada data ADC yang terbaca oleh mikrokontroler oleh sebab itu dilakukan pengkalibrasian sensor agar tidak mempengaruhi
proses pengambilan data.
Proses kalibrasi dengan jalan yaitu mengambil nilai ADC saat belum ada beban kemudian data tersebut disimpan yang kemudian dikurangi dengan
nilai konstanta tertentu yang sudah diset nilainya.
Jika hasil dari pengurangan nilai ADC saat tidak ada beban kurang dari nol, maka data ADC kemudian di set menjadi nol. Sehingga berat yang tertampil
adalah nol kilogram.
Sedangkan untuk sensor tinggi, jika tidak ada pengguna jarak yang terukur adalah nol meter
Setelah proses kalibrasi selesai masuk ke proses selanjutnya yaitu apakah ada pengguna atau tidak, jika belum ada data tinggi dan berat badan maka
data yang ditampilkan kosong atau bernilai nol.
Jika sudah ada pemakai maka proses selanjutnya yang dilakukan adalah mengukur tinggi badan.
Proses pengambilan data tinggi yaitu dengan mengukur jarak dari kepala sampai pada jarak sensor. Setelah tahap ini selesai maka konstanta nilai
jarak yang sudah diatur dikurangi dengan hasil dari pembacaan sensor. Hasil pengurangan tersebut kemudian menjadi data tinggi badan dari
pemakai.
Proses selanjutnya yaitu pengukuran berat badan pemakai.
Ada beban pada timbangan, maka nilai ADC yang terbaca oleh mikrokontroler lebih besar dari konstanta kalibrasi sehingga nilai selisih
yang didapat lebih dari nol, sehingga alur program akan menuju pada proses
berikutnya.
Nilai ADC diambil sebanyak 100 kali kemudian dicari nilai rata-ratanya, setelah didapatkan nilai rata-rata menuju ke proses konversi data dari ADC
33
Data tinggi dan berat badan sudah diperoleh maka akan dilakukan proses perhitungan nilai BMI.
Perhitungan nilai BMI selesai maka data yang sudah didapat akan ditampilkan pada LCD karakter
Data yang ditampilkan yaitu berupa data tinggi, berat, hasil perhitungan BMI, dan kriteria BMI berdasarkan hasil perhitungan nilai BMI.

![Gambar 3.8 Timing Diagram Mode 1[12]](https://thumb-ap.123doks.com/thumbv2/123dok/866921.473088/8.595.101.522.176.739/gambar-timing-diagram-mode.webp)