ISBN : 978-602-97491-7-5
A-5-1
OPTIMASI MULTIRESPON DENGAN MENGGUNAKAN METODE
HYBRID FUZZY GOAL PROGRAMMING DAN GENETIC ALGORITHM
(Studi Kasus : Pemotongan Logam pada Mesin EDM Sinking)
Ulfa Meida Nurmaya1 *), Sonny Sunaryo2) , Irhamah 3) dan Muhammad Sjahid Akbar 4)1) Jurusan Statistika, Institut Teknologi Sepuluh Nopember Jl. Raya ITS,Surabaya, 60111, Indonesia
e-mail: ulfa.meida@gmail.com
2,3,4) Jurusan Statistika, Institut Teknologi Sepuluh Nopember
ABSTRAK
Optimasi multirespon merupakan prosedur yang dilaksanakan untuk melakukan optimasi secara serentak pada beberapa respon sekaligus dengan cara yang simultan. Penelitian ini mengaplikasikan metode hybrid Fuzzy Goal Programming (FGP) - Genetic Algorithm (GA) pada pemotongan logam dengan menggunakan mesin EDM sinking untuk mendapatkan hasil yang optimum. Optimasi dilaksanakan pada 4 respon yakni laju keausan elektroda, kedalaman potong akhir, kekasaran permukaan benda kerja, dan laju pengerjaan material benda. Penggunaan FGP didasari alasan bahwa metode ini memberikan fleksibilitas. FGP dapat diterapkan saat fungsi tujuan dan fungsi batasan tidak dapat terdefinisi secara jelas sehingga memerlukan bilangan fuzzy sebagai operator. Kelebihan ini yang tidak mampu ditangani oleh metode dasar Goal Programming (GP) biasa. Selain itu, penggunaan FGP dapat diaplikasikan untuk optimasi respon dengan bobot yang berbeda. Hasil dari GA merupakan metode metaheuristik digunakan untuk dapat menemukan solusi yang optimum global karena menerapkan sistem random. Hasil perbandingan antara metode hybrid FGP-GA yang menggunakan penyelesaian metaheuristik menunjukkan hasil yang lebih baik dibandingkan FGP yang menggunakan penyelesaian matematis. Kebaikan hasil ini selain ditunjukkan dengan membandingkan masing-masing respon secara langsung juga dapat dilihat dari nilai objektif.
Kata kunci: Optimasi, Multirespon, Hybrid, Fuzzy Goal Programming, Genetic Algorithm, Optimal
PENDAHULUAN
Salah satu permasalahan dalam suatu pengambilan keputusan adalah melakukan pemilihan kondisi beberapa variabel input (prediktor) untuk mendapatkan output (respon) yang optimum sesuai dengan harapan. Optimasi yang paling sederhana dan paling mudah dilakukan adalah optimasi tunggal artinya hanya ada satu respon yang ingin dioptimalkan. Faktanya, pada permasalahan riil optimasi tunggal jarang digunakan karena permasalahan yang dihadapi sangat kompleks dengan respon yang ingin dioptimalkan lebih dari satu. Optimasi yang dilakukan pada beberapa respon disebut dengan optimasi multirespon. Pada optimasi multirespon, banyak terjadi kompleksitas yang mempengaruhi optimasi respon. Kompleksitas ini muncul ketika suatu setting yang diterapkan telah mengoptimalkan salah satu respon, belum tentu setting ini juga akan mengoptimalkan respon yang lainnya. Bahkan, tidak jarang terjadi konflik antar respon-respon tersebut. Suatu ide yang dapat dilaksanakan untuk mengatasi kejadian ini adalah dengan menemukan solusi yang satisfice atau dapat disebut dengan win-win solution bagi seluruh respon.
ISBN : 978-602-97491-7-5
A-5-2
Respon Surface Methodology (RSM) merupakan salah satu metode yang paling dasar yang pertama kali dikembangkan oleh Box dan Wilson. RSM merupakan suatu metode yang mengkombinasikan desain eksperimen dengan teknik-teknik statistika untuk membangun optimasi sebuah model. RSM memiliki kelemahan utama untuk kasus optimasi multirespon karena metode yang digunakan adalah fungsi desirability yang membutuhkan batas atas dan batas bawah yang jelas mengenai hasil optimum yang diinginkan. Sedangkan pada respon kasus respon optimum bila didapatkan nilai sekecil-kecilnya (STB) maupun sebesar-besarnya (LTB), batasan ini tidak dapat ditentukan sebelumnya. Dalam rangka menghindari penentuan batas nilai respon untuk optimasi multirespon, dikembangkan suatu metode yang memiliki peranan penting dalam optimasi yakni Goal Programming (GP) yang isusun oleh Charnes dan Cooper (1961). Akan tetapi, metode ini memiliki beberapa kelemahan sehingga tidak dapat diterapkan pada beberapa kasus yang memiliki kompleksitas tinggi. Kelemahan tersebut antara lain adalah pada GP keseluruhan parameter harus ditetapkan secara jelas serta pada kasus multirespon dengan n fungsi tujuan, maka (n-1) dari fungsi tujuan tersebut ditarik menjadi fungsi batasan. Hal tersebut akan menjadi tidak sesuai terutama apabila kondisi variabel respon saling berkorelasi serta menimbulkan misunderstanding terhadap respon yang terboboti. Oleh karena itu, Chao, dkk (2007) menawarkan metode fuzzy goal programming (FGP) dengan prioritas fungsi tujuan yang berbeda-beda. Kelebihan dari metode FGP adalah dapat menyederhanakan model yang kompleks dengan terbentuknya membership value. Adanya membership value akan memberikan solusi yang fleksibel karena model fuzzy memiliki banyak tipe yang dapat digunakan untuk mendukung analisis. Selain digunakan sebagai metode yang berdiri sendiri, FGP banyak digabungkan dengan beberapa jenis optimasi lainnya.
Mengacu pada jurnal yang telah ditulis oleh Khoo dan Chen (2001); Amiri dkk. (2008) serta Sharma dan Jana (2009), maka pada penelitian ini akan menerapkan metode hybrid antara FGP dan Genetic Algorithm (GA) untuk optimasi multirespon. Berbeda dengan penelitian tentang hybrid FGP-GA yang digunakan sebelumya (Sharma dan Jana, 2009), pada penelitian ini metode tersebut digunakan untuk optimasi pada kasus eksperimental. Studi kasus yang digunakan sebagai aplikasi dari metode ini adalah hasil penelitian dari Ro’issudin (2009) dan Purwanto (2010) mengenai pemotongan logam non-konvensional pada mesin EDM sinking H Walter Exeron 104. Pada masing-masing penelitian tersebut hanya menggunakan 2 respon. Namun pada tahun 2013, Wijaya menggabungkan respon yang digunakan sebagai tolak ukur hasil pemotongan menjadi 4 untuk kemudian dioptimasi dengan menggunakan Nonlinier Programming. Tujuan dari penelitian ini adalah menyusun suatu prosedur untuk menentukan optimasi dengan metode FGP maupun hybrid FGP-GA serta membandingkan hasil keduanya.
METODE PENELITIAN
Rancangan penelitian merupakan jenis rancangan Box-Behnken 4 faktor dimana setiap faktor memiliki 3 level. Dalam penelitian ini, ada 4 jenis variabel prediktor yakni On time (level 2, 7 dan 12), Off Time (level 2, 6 dan 10), Pulse Current (level 4, 8 dan 12) dan Gap Width (level 27 μm, 40 μm, dan 53 μm). Variabel respon yang sekaligus digunakan sebagai parameter untuk mengukur hasil kebaikan ada 4 jenis yang terdiri dari 2 jenis respon yang diinginkan sekecil-kecilnya (STB) dan dua lainnya diinginkan sebesar-besarnya (LTB). Respon-respon tersebut secara berurutan Y1-Y4 adalah laju keausan elektroda (STB), kedalaman potong akhir (LTB), kekasaran permukaan benda kerja (STB) dan laju pengerjaan material benda kerja (STB). Setiap respon memiliki prioritas yang berbeda tergantung pada Decision Maker. Pada penelitian ini, Respon Y2 dan Y4 memiliki prioritas 2 kali lebih besar
ISBN : 978-602-97491-7-5
A-5-3
dibandingkan Y1 dan Y3. Prioritas ini mempengaruhi besarnya angka pembobot. Prosedur optimasi dimulai dengan menggunakan metode RSM untuk membentuk persamaan matematis serta optimasi untuk masing-masing respon. Hasil optimasi individu tersebut digunakan untuk menentukan nilai Upper, Lower dan selisihnya (Δ) untuk kemudian digunakan pada persamaan keanggotaan Fuzzy. Selanjutnya, dilakukan pembentukan model FGP yang meliputi fungsi tujuan dan fungsi batasan yang kemudian dioptimasikan dengan metode nonlinier programming. Langkah terakhir adalah menggunakan hasil optimasi FGP tersebut sebagai inisialisasi kromosom pada GA untuk kemudian dilakukan optimasi secara serentak. Response Surface Methodology (RSM)
RSM merupakan salah satu metode penyelesaian untuk kasus optimasi multirespon. Karakteristik utama dari metode RSM adalah bahwa metode ini merupakan suatu paket komplit dalam desain statistika yang merupakan gabungan antara desain eksperimen dan regresi. Desain yang paling terkenal dan sering digunakan dalam penelitian antara lain adalah Central Composite Design (CCD) dan desain Box-Behnken. Pada penelitianm ini digunakan desain box-behnken karena memiliki kelebihan dibandingkan dengan CCD. Kelebihan tersebut adalah bahwa desain ini lebih efisien dengan jumlah runs percobaan lebih sedikit, terutama untuk percobaan dengan 3 atau 4 faktor.
Optimasi respon tunggal pada RSM dimulai dengan melakukan analisis orde pertama (model linier). Fungsi model linier ditunjukkan pada persamaan (1).
k i i ix y 1 0 ˆ ˆ ˆ (1)Kesesuaian order dapat dilihat melalui signifikansi dari Lack Of Fit (LOF). Pada orde pertama diharapkan untuk tolak H0 atau LOF signifikan sehingga orde pertama tidak sesuai. Hal ini didasarkan pada bahwa untuk model linier yang pada umumnya berbentuk garis lurus, tidak ada titik optimum yang dapat ditemukan. Namun, apabila orde 1 memiliki LOF yang signifikan, maka perlu dilakukan steepest accent untuk menemukan level-level percobaan baru untuk kemudian dilakukan percobaan ulang. Saat hasil yang didapatkan telah sesuai harapan yakni orde 1 tidak sesuai, maka dapat dilanjutkan pada analisis orde 2. Model Orde dua adalah sebagai berikut.
j i j i ij k i i ii k i i ix x xx yˆ
ˆ
ˆ
ˆ
ˆ 1 2 1 0 (2) Bx x b x ˆ0 ˆ
y (3)Model orde 2 diharapkan memiliki LOF yang sesuai sehingga ditemukan setting yang tepat untuk menghasilkan respon yang optimum. Menurut Montgomery (1997), kondisi yang optimum dapat diperoleh dari membentuk turunan kedua ˆ 0
x y , sedemikian hingga persamaan menjadi 0 2 ˆ b Bx x y (4) Sehingga didapatkan variabel independen yang optimum dengan rumus x B-1b
s 2 1
.
Berdasarkan persamaan (4), maka didapatkan respon optimum melalui 0 xsb
2 1 ˆ ˆs
ISBN : 978-602-97491-7-5
A-5-4
Setelah ditemukan hasil optimasi, maka dilakukan pengujian asumsi residual terhadap hasil persamaan pada masing-masing respon.
Fuzzy Goal Programming (FGP)
Fuzzy Goal Programming (FGP) atau bisa juga disebut dengan Chebyshev Goal Programming merupakan salah satu perluasan dari metode GP. Gagasan utama dari metode FGP ini adalah meminimumkan total deviasi dari beberapa tujuan. Pada metode ini, digunakan suatu fungsi keanggotaan fuzzy. Nilai fungsi keanggotaan metode FGP ini memerlukan input berupa nilai upper dan lower dari masing-masing tujuan yang diolah secara single-objective. Tabel 1 berikut menunjukkan cara mendapatkan nilai-nilai tersebut
Tabel 1 Penentuan Nilai Upper dan Lower Respon
Z1 Z2 Zm Upper Lower Delta
Pers (Y1) Z11 Z12 Z1m Max (Z1k) Min (Z1k) Max (Z1k)-Min (Z1k)
Pers (Y2) Z21 Z22 Z2m Max (Z2k) Min (Z2k) Max (Z2k)-Min (Z2k)
Pers (Ym) Zm1 Zm2 Zmm Max (Zmk) Min (Zmk) Max (Zmk)-Min (Zmk)
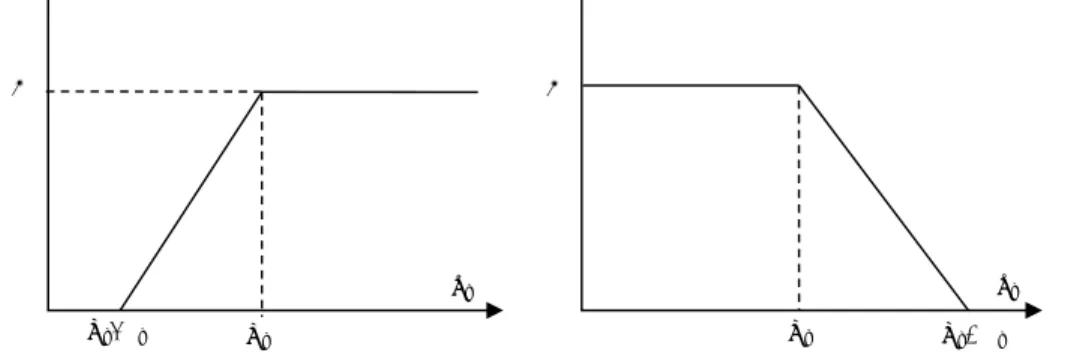
Selain hasil optimasi, persamaan respon RSM juga digunakan sebagai bahan fungsi batasan pada FGP. Sesuai variasi dengan tujuan respon yakni LTB dan STB, bentuk fungsi keanggotan untuk tujuan juga dibedakan atas STB dan LTB. Berdasarkan Sharma dan Jana (2009) serta Amiri, dkk (2008), bentuk fungsi keanggotaan adalah sebagai berikut.
Gambar 1 (a) Fungsi Keanggotaan yang
Bersesuaian untuk LTB Gambar 1 (b) Fungsi Keanggotaan yang Bersesuaian untuk STB
Berdasarkan bentuk fungsi keanggotaan Gambar 1(a) dan 1(b), maka dapat dibentuk persamaan keanggotaan fuzzy sebagai berikut.
l j j j j j l j j j j l j l j j j j U Z U Z U U Z U Z Z (5) 0 1
u j j j u j j j j j j u j j u j j j U Z U Z U U Z Z U Z (6) 0 1 Persamaan (5) dan (6) digunakan sebagai fungsi batasan dengan Zj merupakan persamaan respon yang dihasilkan melalui metode RSM. Persamaan (5) digunakan untuk respon LTB dan persamaan (6) digunakan untuk respon STB. Berdasarkan tujuannya untuk meminimumkan toral deviasi, maka persamaan permasalahan FGP dapat didefinisikan sebagai berikut (Kim dan Whang, 1998):
Uj - Δj Uj Uj Uj + Δj
Zj Zj
1 1
ISBN : 978-602-97491-7-5
A-5-5
Fungsi Objektif : min
i J j i i i j i i w w 1 1 1 1 (7) fungsi batasan : 1 ,..., 2 , 1 , j j U Zj
jlj j (8) J j j j U Zj
juj j, 11, 12,..., (9) 1 1 1 1 1
J j i i j i i w w (10) 1 , 0 j j
(11) Degan iw dan w merupakan bobot dari goals fuzzy yang bersesuaian. i Genetic Algorithm (GA)
Genetic Algorithm (GA) merupakan algoritma yang memanfaatkan proses seleksi alamiah yang dikenal dengan proses evolusi. Dalam proses evolusi, individu secara terus-menerus mengalami perubahan gen untuk menyesuaikan dengan lingkungan hidupnya. Metode GA diajukan oleh Holland (1975) sebagai metode heuristik berdasarkan “survival of the fittest”. Secara umum, ada 8 komponen penting dalam proses GA sebagai berikut.
1) Representasi dan Inisialisasi
GA bekerja pada sejumlah solusi yang feasible disebut dengan populasi. Populasi terdiri dari beberapa pengkodean parameter secara bersama. Populasi biasanya terdiri dari 30 sampai 100 individu. Pada proses inisialisasi dapat dilakukan pengkodean (dalam bilangan biner) maupun tidak (bilangan kontinyu).
2) Fungsi Tujuan dan Nilai Fitness
Nilai Fitness digunakan sebagai ukuran performansi. Penentuan nilai fitness bergantung pada tujuan dari suatu permasalahan yang dibentuk menjadi suatu fungsi tujuan. Fungsi tujuan digunakan untuk memberikan ukuran individu telah dikerjakan dalam domain permasalahan.
3) Elitisme
Merupakan suatu prosedur pengopian individu dengan nilai fitness terbaik kedalam populasi baru. Proses ini bertujuan agar individu yang memiliki nilat fitness tertinggi tidak hilang selama proses evolusi sehingga dapat mencegah kehilangan solusi terbaik. 4) Proses Seleksi Orangtua
Seleksi bertujuan untuk menentukan kromosom induk yang selanjutnya digunakan pada proses pindah silang. Proses seleksi ini dilakukan secara random dengan bergantung pada probabilitas relatif nilai fitness dari masing-masing individu. Metode yang seringkali digunakan dalam proses seleksi adalah metode Roulette Wheel. Konsep utamanya adalah sebuah kromosom akan terpilih apabila bilangan random yang dibangkitkan berada didalam interval kumulatifnya.
5) Pindah Silang (Crossover)
Pindah silang merupakan suatu proses yang digunakan untuk memilih gen dari sepasang kromosom induk dan membentuk suatu keturunan kromosom baru. Metode yang paling mudah digunakan adalah metode titik.
6) Mutasi
Sivananandam dan Deepa (2008) menyebutkan bahwa proses mutasi ini dilakukan untuk mencegah algoritma terjebak pada solusi yang lokal minimum. Prosedur pengubahan kromosom dalam mutasi cukup sederhana, jika bilangan random yang dibangkitkan
ISBN : 978-602-97491-7-5
A-5-6
kurang dari peluang mutasi (Pm) yang ditentukan, maka gen tersebut akan diubah menjadi
kebalikannya.
7) Pemberhentian Looping GA
Proses GA diberhentikan pada saat kondisi telah konvergen. Beberapa kondisi yang dapat membuat iterasi GA berhenti antara lain adalah sudah dicapai generasi maksimum dalam evolusi, waktu running yang ditentukan telah lewat, tidak ada perubahan nilai fitnes dari sati generasi ke generasi berikutnya, tidak ada perbaikan fungsi tujuan selama beberapa generasi serta tidak adanya perbaikan fungsi tujuan selama interval waktu tertentu.
HASIL DAN PEMBAHASAN
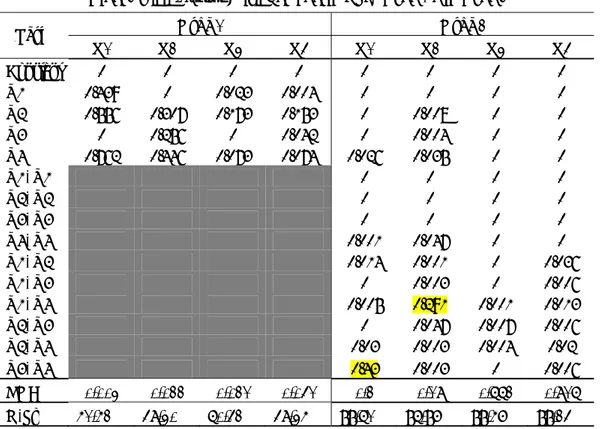
Seperti yang telah dijelaskan pada metode penelitian, prosedur penentuan optimasi dimulai dengan pembentukan persamaan Orde 1 maupun Orde 2 melalui RSM. Tabel 2 berikut ini menunjukkan hasil pemodelan dimana signifikansinya ditunjukkan secara langsung oleh nilai p-value tiap variabel dari masing-masing orde.
Tabel 2 Nilai P-value Hasil Pemodelan RSM Orde 1 dan Orde 2
[Term Orde 1 Orde 2 Y1 Y2 Y3 Y4 Y1 Y2 Y3 Y4 Constant 0 0 0 0 0 0 0 0 X1 0.439 0 0.023 0.004 0 0 0 0 X2 0.556 0.307 0.173 0.153 0 0.008 0 0 X3 0 0.256 0 0.042 0 0.004 0 0 X4 0.762 0.446 0.073 0.074 0.026 0.035 0 0 X1*X1 0 0 0 0 X2*X2 0 0 0 0 X3*X3 0 0 0 0 X4*X4 0.001 0.047 0 0 X1*X2 0.014 0.001 0 0.036 X1*X3 0 0.003 0 0.006 X1*X4 0.005 0.291 0.001 0.013 X2*X3 0 0.047 0.007 0.006 X2*X4 0.03 0.003 0.004 0.02 X3*X4 0.43 0.003 0 0.006 LOF 0.003 0.022 0.021 0.041 0.2 0.18 0.662 0.816 R-Sq 51.52% 48.30% 60.42% 48.35% 99.61% 96.97% 99.57% 99.24%
Salah satu indikasi kesesuaian order dapat dilihat melalui uji ketidaksesuaian atau Lack of Fit (LOF) test. Berdasarkan Tabel 2, dapat dilihat bahwa dengan menggunakan tingkat kepercayaan 95% dapat dinyatakan bahwa LOF signifikan untuk keseluruhan variabel respon. Signifikansi LOF pada model linier ini berarti adanya perbedaan yang signifikan antara rata-rata lokal dengan fitted value. Oleh karena itu berdasarkan pengujian LOF dapat disimpulkan bahwa persamaan linier yang terbentuk belum sesuai untuk memodelkan seluruh respon. Sesuai dengan harapan, selanjutnya pemodelan dilakukan dengan menggunakan orde 2. Seluruh LOF yaang digunakan untuk pengujian ketidaksesuaian model orde 2 sudah tidak signifikan yang artinya bahwa untuk semua respon, model kudratik lebih cocok diterapkan dibandingkan dengan model linier. Pernyataan tersebut diperkuat dengan besarnya R-Sq yang memiliki nilai tinggi mendekati 100% untuk keseluruhan variabel respon. Walaupun ada
ISBN : 978-602-97491-7-5
A-5-7
ketidaksignifikansian beberapa variabel interaksi, namun variabel tersebut tetap dimasukkan ke dalam model mengingat model RSM orde-2 merupakan model yang full kuadratik. Penaksiran parameter dilakukan dengan menggunakan Ordinary Least Square (OLS). seperti yang dinyatakan Montgomery (1997), OLS dapat digunakan untuk menaksir parameter dengan baik bila residualnya telah memenuhi beberapa asumsi.
Oleh karena itu, langkah selanjutnya adalah dilakukan pengujian residual yakni identik, independen, dan berdistribusi normal. Pengujian identik dengan menggunakan Uji Glejser menyatakan bahwa seluruh titik residual telah identik, artinya tidak ada heterogenitas pada varians residual. Hal serupa juga didapatkan pada pengujian independen dengan menggunakan Uji Durbin-Watson maupun pengujian normalitas dengan Uji Kolmogorov-Smirnov. Dikarenakan residual telah memenuhi asumsi, maka penaksiran parameter yang menggunakan metode OLS tersebut dapat digunakan. Setelah didapatkan persamaan orde 2, maka hasil optimasi untuk tiap respon dapat dilihat pada Tabel 3 berikut.
Tabel 3 Hasil Optimasi tiap Respon
Respon Y1 Respon Y2 Respon Y3 Respon Y4
x1s 0.2247 1.1774 -0.3197 0.3829
x2s 0.0684 0.6810 0.1805 -0.1382
x3s -0.3385 0.3335 -0.3222 0.2807
x4s 0.3401 0.2924 0.1741 -0.5551
ys 0.2542 1.9775 3.0502 44.0058
Status Min Max Min Max
Hasil optimasi pada Tabel 3 tersebut merupakan hasil secara individu. Berdasarkan nilai eigen value, kondisi optimal (minimal/maksimal) dapat dilihat pada baris status. Hasil yang didapatkan melalui teori sudah sesuai dengan kenyataan bahwa Y1 dan Y3 merupakan variabel yang hasilnya ingin didapatkan sekecil-kecilnya, sedangkan sisanya adalah sebesar-besarnya.
Hasil nilai-nilai yang optimum pada masing-masing respon tersebut kemudian disubstitusikan pada masing-masing persamaan untuk mendapatkan nilai lower, upper dan Δ. Hasil tersebut ditunjukkan pada Tabel 4 berikut.
Tabel 4 Solusi Persamaan Tiap Respon
Solusi 1 Solusi 2 Solusi 3 Solusi 4 Uj Lj Δ
Persamaan 1 0.2545 0.6599 0.2937 0.6219 0.6599 0.2545 0.4054 persamaan 2 1.8730 1.9775 1.8280 1.9287 1.9775 1.8280 0.1494 Persamaan 3 3.3779 6.8824 3.0502 5.9495 6.8824 3.0502 3.8322 Persamaan 4 36.5431 26.8267 33.3442 44.0061 44.0061 26.8267 17.1793 Penggabungan antara nilai Uj, Lj dan Δj serta hasil persamaan kuadratik RSM digunakan
untuk memformulasikan persamaan FGP yang terdiri dari fungsi batasan dan fungsi tujuan. Dalam kasus ini, terdapat 1 fungsi tujuan serta 4 fungsi batasan utama. Jumlah fungsi batasan utama ini sesuai dengan jumlah respon yang akan dioptimalkan karena juga berasal dari persamaan respon tersebut.
Fungsi tujuan : 4 3 2 1 0,333 0,167 0,333 167 , 0 : min Fungsi batasan :
ISBN : 978-602-97491-7-5 A-5-8 6599 , 0 4054 , 0 0196 , 0 059 , 0 17 , 0 0838 , 0 1373 , 0 0694 , 0 0951 , 0 748 , 0 1144 , 0 1507 , 0 0351 , 0 542 , 0 068 , 0 0905 , 0 3646 , 0 1 4 3 4 2 3 2 4 1 3 1 2 1 2 4 2 3 2 2 2 1 4 3 2 1 X X X X X X X X X X X X X X X X X X X X 9775 , 1 1494 , 0 0575 , 0 06 , 0 035 , 0 0175 , 0 06 , 0 0675 , 0 0304 , 0 1441 , 0 0841 , 0 0754 , 0 0216 , 0 0325 , 0 0291 , 0 1167 , 0 8967 , 1 2 4 3 4 2 3 2 4 1 3 1 2 1 2 4 2 3 2 2 2 1 4 3 2 1 X X X X X X X X X X X X X X X X X X X X 8824 , 6 8322 , 3 0,625 0,337 0,312 0,412 0,487 0,462 0,997 2,547 1,241 1,0167 0,741 1,85 0,5542 0,9625 3,6167 3 4 3 4 2 3 2 4 1 3 1 2 1 2 4 2 3 2 2 2 1 4 3 2 1 X X X X X X X X X X X X X X X X X X X X 0061 , 44 1793 , 17 2,04 1,637 2,0625 1,77 2,03 1,442 4,559 12,201 8,331 10,761 4,0375 4,655 3,185 6,887 40,693 4 4 3 4 2 3 2 4 1 3 1 2 1 2 4 2 3 2 2 2 1 4 3 2 1 X X X X X X X X X X X X X X X X X X X X 0 , 3 1 1 , 4 2
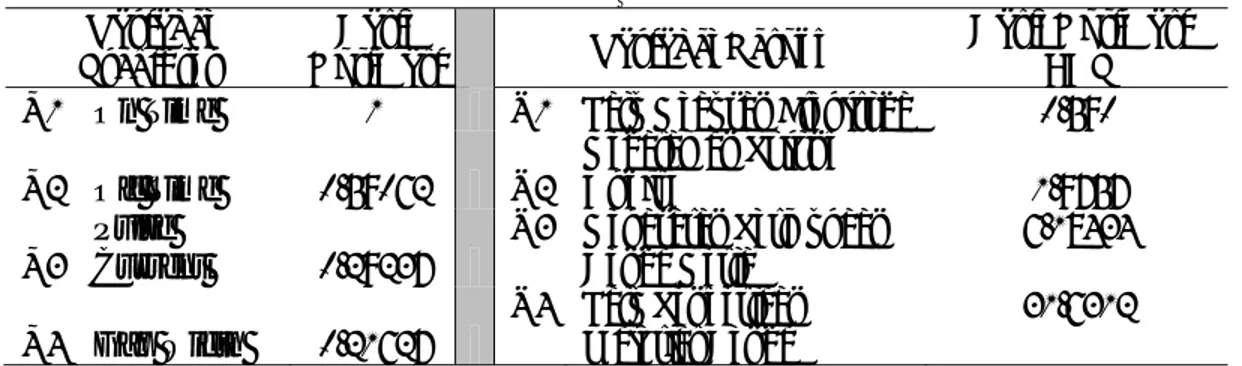
Dikarenakan persamaan tersebut memuat model yang nonlinier, maka penyelesaian dari persamaan FGP adalah dengan menggunakan matematis nonlinier programming. Hasil dari FGP ditampilkan pada Tabel 5. Solusi yang didapatkan dengan menggunakan FGP pada dasarnya merupakan solusi yang optimum lokal. Artinya, kondisi optimum yang dicapai tidak bersifat global tergantung pada sudut pandang posisi kurva yang terbentuk.
Tabel 5 Hasil Optimasi dengan menggunakan Fuzzy Goal Programming Variabel
Prediktor Optimasi Hasil Variabel Respon Hasil Optimasi FGP
X1 On Time 1 Y1 Laju Keausan Elektroda 0.590
X2 Off Time 0.59062 Y2 Kedalaman Potong Akhir 1.9757
X3
Pulse
Current 0.29237
Y3 Kekasaran Permukaan
Benda Kerja 6.18434
X4 Gap Width 0.21627 Y4 Laju Pengerjaan Material Benda 31.6312
Kondisi optimum lokal ini mendorong peneliti untuk melakukan hybrid dengan metode lain supaya didapatkan solusi yang dapat memenuhi kondisi optimum global. Metode yang digunakan adalah Genetic Algorithm (GA) yakni salah satu metode metaheuristik yang dikembangkan untuk penyelesaian kasus optimasi. Solusi yang telah didapatkan melalui FGP yang ditunjukkan oleh Tabel 5 selanjutnya digunakan sebagai nilai inisiasi awal untuk membangkitkan populasi pada GA. Pada proses GA ini dilakukan suatu adjustment pada probabilitas crossover(Pc). Tidak menggunakan acuan dimana umumnya Pc yang diguanakan adalah sebesar 0,8, pada penelitian ini dilakukan looping Pc sedemikian hingga didapatkan nilai objektif yang paling minimum. Hal ini dilakukan untuk mendapatkan solusi terbaik yang sesuai dengan studi kasus.
ISBN : 978-602-97491-7-5
A-5-9
Gambar 2 Nilai Fungsi Objektif pada Setiap Probabilitas Crossover
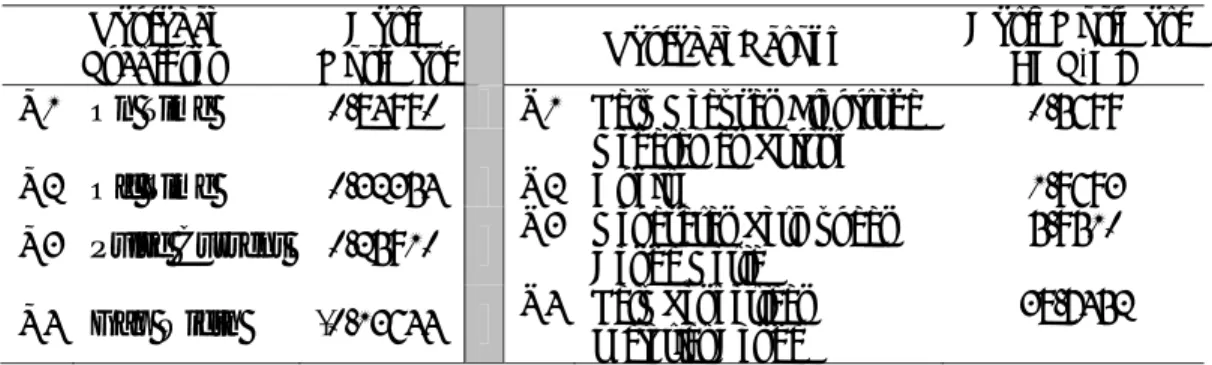
Gambar 2 menunjukkan bahwa fungsi objektif paling minimum didapatkan saat penggunaan Probabilitas Crossover (Pc) sebesar 0,15 dengan Fval sebesar 0,1336. Nilai Pc yang relatif rendah ini berarti bahwa tidak banyak kromosom yang mengalami proses pindah silang. Hal ini ditengarai karena kromosom yang digunakan untuk inisialisasi awal merupakan solusi optimal yang didapatkan melalui metode matematis FGP. Solusi akhir dengan menggunakan optimasi GA ditunjukkan pada Tabel 6.
Tabel 6 Solusi Optimum dengan Menggunakan FGP-GA Variabel
Prediktor
Hasil
Optimasi Variabel Respon
Hasil Optimasi FGP-GA
X1 On Time 0.84980 Y1 Laju Keausan Elektroda 0.5699 X2 Off Time 0.32354 Y2
Kedalaman Potong
Akhir 1.9693 X3 Pulse Current 0.25910 Y3 Kekasaran Permukaan Benda Kerja 5.9510
X4 Gap Width -0.13644 Y4 Laju Pengerjaan Material Benda 38.7452
Solusi yang didapatkan pada Tabel 6 merupakan angka hasil pengkodean dari variabel prediktor dalam bentuk koding Box-Behnken dan koding mesin EDM. Oleh karena itu, perlu dilakukan transformasi sehingga didapatkan hasil setting input riil.
Tabel 7 Transformasi Decoding dan Nilai Riil terhadap Hasil Optimasi
X1 X2 X3 X4
Decoding 11.2490 7.2941 9.0364 38.2263
Nilai Riil 979.9216 μs 663.5318 μs 27.1092 A 38.2263 μm
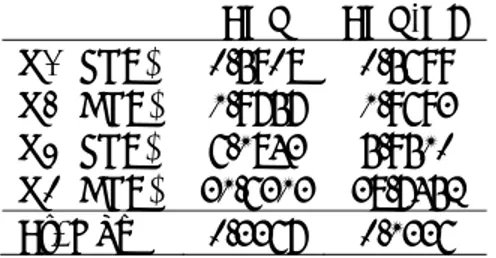
Setelah didapatkan respon optimum dari baik metode FGP maupun hybrid FGP-GA, maka selanjutnya adalah dilakukan perbandingan hasil dari kedua metode tersebut. perbandingan dilakukan dengan cara langsung melihat hasil respon masing-masing metode serta melihat fungsi objektifnya. Berdasarkan Tabel 8, keseluruhan respon pada metode FGP-GA cenderung lebih baik dibandingkan dengan metode FGP kecuali untuk respon Y2. Pada respon Y2 ini, metode FGP memberikan nilai yang lebih besar dibandingkan dengan FGP-GA. Akan tetapi, selisih yang diberikan tidak terlalu besar bila dibandingkan dengan ketiga respon lainnya. Artinya, metode FGP-GA memberikan solusi yang memiliki tingkat compromise lebih baik dibandingkan dengan metode FGP. Selain dilihat dari respon,
0.000000 0.050000 0.100000 0.150000 0.200000 0.250000 0.300000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Pc Vs Fval
ISBN : 978-602-97491-7-5
A-5-10
kebaikan metode ini dapat pula dilihat dari nilai fungsi objektif dimana fungsi objektif FGP-GA lebih kecil dibandingkan FGP.
Tabel 8 Perbandingan Hasil Respon dari Metode FGP, dan FGP-GA
FGP FGP-GA Y1 (STB) 0.5908 0.5699 Y2 (LTB) 1.9757 1.9693 Y3 (STB) 6.1843 5.9510 Y4 (LTB) 31.6313 38.7452 Fs. Obj 0.3367 0.1336
KESIMPULAN DAN SARAN
Berdasarkan penelitian ini, dapat ditarik beberapa kesimpulan antara lain :
1. Model RSM yang terbentuk pada masing-masing respon merupakan model full kuadratik serta memiliki hasil yang sesuai dengan tujuan respon yakni STB maupun LTB.
2. Pada studi kasus pemotongan logam pada mesin EDM sinking, dengan menggunakan metode yang diusulkan yakni hybrid FGP-GA didapatkan setting untuk mendapatkan hasil yang optimum. Variabel tersebut adalah On time sebesar 979.9216 μs, Off time sebesar 663.5318 μs, Pulse current sebesar 27.1092 A, dan Gap width sebesar 38.2263 μm.
3. Hasil perbandingan antara metode hybrid FGP-GA yang menggunakan penyelesaian metaheuristik menunjukkan hasil yang lebih baik dibandingkan FGP yang menggunakan penyelesaian matematis.
Adapun untuk pengembangan penelitian di masa mendatang, peneliti memberikan saran untuk melakukan adjustment terhadap metode metaheuristik yang mengingat banyaknya metode-metode komputasional yang banyak bermunculan setelah GA.
DAFTAR PUSTAKA
Amiri, M., Karimi, N. & Jamshidi, S. F. (2008). A Methodology for Optimizing Statistical Multi-Response Problems Using Genetic Local Search Algorithm Through Fuzzy Goal Programming. Journal of Applied Science 8(18), 3199-3206.
Amiri, M., Najafi, A. A., & Gheshlaghi, K. (2008). Response Surface Methodology and Genetic Algorithm in Optimization of Cement Clinkering Process. Journal of Applied Science 8 (15), 2732-2738.
Charnes, A., & Cooper, W. W. (1961). Management Models and Industrial Applications of Linear Programming, Vols 1 & 2. New York : John Wiley.
Holland, J., H. (1975). Adaptation in Natural and Artificial Systems. Ann Arbor : University of Michigan Press.
Khoo, L. P. & Chen, C. H. (2001). Integration of Response Surface Methodology with Genetic Algorithm. International Journal of Advance Manufacture Technology, 18. 483-489
Kim, J. S. & Whang, K. (1998). A Tolerance Approach To The Fuzzy Goal Programming Problems With Unbalanced Triangular Membership Function. European Journal of Operation Research 107, 614-624.
ISBN : 978-602-97491-7-5
A-5-11
Montgomery, D. C. (1997). Design and Analysis of Experiment 4th edition. New York : John
Willey and Sons.
Purwanto, B. T. (2010). Maksimalisasi Laju Pengerjaan Material dengan Kekasaran Permukaan Sebagai Konstrain pada Proses Perautan Mesin EDM Sinking. Surabaya: Institut Teknologi Sepuluh Nopember.
Roissudin .(2009). Maksimalisasi Kedalaman Potong Akhir dengan Laju Keausan Elektroda sebagai Kendala pada Proses Perautan Mesin EDM Sinking. Surabaya : Institut Teknologi Sepuluh Nopember.
Sharma, D. K. & Jana, R. K. (2009). Fuzzy Goal Programming Based Genetic Algorithm Approach to Nutrient Management For Rice Crop Planning. International Journal Production Economics 121, 224-232.
Sharma, D. K. , Jana, R. K., & Gaur, A. (2007). Fuzzy Goal Programming For Agricultural Land Allocation Problems. Yugoslav Journal of Operations Research, 1, 31-42. Sivanandam, S., N. & Deepa, S., N. (2008). Introduction to Genetic Algorithms. New York :
Springer Berlin Heidelberg.
Wijaya, A.D. (2013). Optimasi Multirespon Pemotongan Logam pada Mesin EDM Sinking dengan Pendekatan Nonlinier Programming. Surabaya : Institut Teknologi Sepuluh Nopember