Fakultas Ilmu Komputer
Universitas Brawijaya
2948
Penentuan Durasi Nyala Lampu Lalu Lintas Berdasarkan Panjang Antrian
Kendaraan Menggunakan Metode
Backpropagation
Shibron Arby Azizy1, Imam Cholissodin2, Edy Santoso3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Lalu lintas merupakan salah satu lokasi dimana orang-orang menghabiskan waktunya. Saat ini dengan pertumbuhan kendaraan yang semakin pesat membuat kondisi lalu lintas di Indonesia semakin padat setiap harinya. Salah satu cara untuk menguraikan kepadatan lalu lintas adalah dengan adanya lampu lalu lintas. Namun, kinerja lampu lalu lintas saat ini dirasa kurang optimal dikarenakan penentuan durasi waktu lalu lintas yang masih statis berdasarkan waktu tertentu. Maka dari itu dibutuhkan suatu sistem yang dapat menentukan waktu, sehingga waktu pada lampu lalu lintas dapat lebih dinamis berdasarkan kondisi lalu lintas. Penelitian ini mengunakan metode backpropagation untuk menentukan durasi nyala lampu lalu lintas berdasarkan panjang antrian kendaraan. Hasil dari pengujian data latih didapatkah bahwa fungsi aktivasi yang cocok adalah fungsi Linear dengan a = 3, iterasi yang optimal didapatkan ketika iterasi 10, jumlah node pada hidden layer yang optimal adalah 2, dan nilai learningrate yang optimal adalah 0,02. Hasil evaluasi yang diperoleh ketika memproses data uji menggunakan fungsi aktivasi, jumlah iterasi, jumlah node pada hidden layer, dan nilai learning rate yang optimal menghasilkan nilai RMSE sebesar 0,0888978841028.
Kata kunci: lalu lintas, lampu lalu lintas, penentuan, backpropagation, RMSE Abstract
Traffic is one location where people spend a lot of time. Currently with the rapid growth of vehicles makes conditions in Indonesia is getting crowded every day. One way to solve this problem is with traffic lights. However, the current traffic light performance is considered less than optimal. Therefore required a system that can determine the time, so the time at the traffic light can be more dynamic based on traffic conditions. This research uses backpropagation method to determine the duration of traffic lights based on queue lenght of vehicle. The result of the trained data test obtained is the Linear function with a = 3, the optimal iteration obtained at iteration 10, the optimal number of nodes in the hidden layer is 2, and the optimal value of learning rate is 0,02. The evaluation result when processing the test data using the optimal activation function, the optimal number of iterations, the optimal number of nodes in the hidden layer, and the optimal learning rate yields RMSE value of 0,0888978841028.
Keywords: tarffic, traffic light, determining, backpropagation, RMSE.
1. PENDAHULUAN
Lalu lintas adalah hal penting dalam kehidupan bermasyarakat. Lalu lintas dan kendaraan umum merupakan salah satu kunci pertumbuhan ekonomi. Tetapi lalu lintas memiliki banyak permasalahan yang terjadi, mulai dari permasalahan yang biasa saja seperti jalanan rusak sampai masalah besar seperti kecelakaan yang menyebabkan korban jiwa. Di Indonesia, lalu lintas memiliki permasalahan lama yang masih belum terselesaikan, yaitu
Indonesia semakin padat. Salah satu cara untuk mengurai kepadatan lalu lintas adalah dengan adanya lampu lalu lintas. Namun dalam beberapa kondisi, lampu lalu lintas kurang efisien untuk menangani masalah tersebut.
Kondisi ini menjadi motivasi utama diadakannya penelitian mengenai Sistem Pengaturan Lampu Lalu Lintas Terdistribusi (SPLLLT). Lalu lintas yang ada saat ini hanya berorientasi terhadap waktu dan ditidak menyesuakan kondisi lalu lintas. SPLLLT diharapkan dapat menjadi bentuk evolusi dari lampu lalu lintas yang ada saat ini. Maka dari itu dibutuhkan suatu sistem yang dapat menentukan waktu sehingga waktu pada lampu lalu lintas dapat lebih dinamis berdasarkan kondisi lalu lintas. Sistem ini akan dapat memecah kepadatan lalu lintas dengan lebih efisien. Jadi ketika volume kendaraan tinggi, maka selisih waktu antara lampu merah dan lampu hijau akan dibuat dekat, begitupun sebaliknya.
Pada penelitian Wicaksana et al. (2014), dijelaskan tentang metode neuro fuzzy untuk pengambilan keputusan pada kasus pemindahan lalu lintas. Metode gabungan dari jaringan syaraf tiruan dan logika fuzzy ini berhasilkan melewatkan 97.07% dari jumlah kendaraan yang sedang mengantri pada lampu lalu lintas. Metode jaringan syaraf tiruan yang digunakan adalah Levenberg-Marquardt Backpropagation. Dan pada penelitian Royani et al. (2013), dijelaskan metode Fuzzy Neural Network (FNN) dan Algoritme Genetika untuk mengatur lampu lalu lintas. Pada peneltian ini, diterapkan metode FNN pada kontrol sinyal dan Algoritme Genetika untuk proses pembelajarannya. Sedangkan penelitian Yohannes et al. (2015), dijelakan secara lengkap urutan penggunaan metode Bakpropagation untuk penentuan upah minimum kota. Parameter yang menentukan adalah tingkat inflasi. Jadi upah minimum kota ditentukan berdasarkan tingkat inflasi yang ada. Penelitian ini memiliki nilai Root Mean Square Error sebesar 0.0728.
Dengan melihat penelitian-penelitian tersebut, maka penulis berniat menggunakan algoritme backpropagation pada penelitian ini. Backpropagation merupakan salah satu algoritme jaringan syaraf tiruan yang digunakan untuk kasus prediksi dan penentuan. Jaringan syaraf tiruan sendiri merupakan metode yang diadaptasi dari jaringan syaraf manusia pada dunia nyata. Pada arsitekturnya terdapat banyak neuron yang saling terhubung dan membentuk janringan. Setiap neuron yang terhubung
memiliki bobot. Bobot inilah yang akan perbarui pada proses pembelajaran backpropagation. Pada penelitian ini algoritme backpropagation digunakan untuk menentukan durasi nyala lampu lalu lintas berdasarkan panjang antrian kendaraan dan harapannya penelitian ini mendapatkan hasil yang optimal.
2. BACKPROPAGATION
Backpropagation merupakan salah satu metode pembelajaran dalam jaringan syaraf tiruan. Proses pembelajaran dalam backpropagation dilakukan dengan penyesuaian bobot-bobot (w) dengan arah mundur berdasarkan nilai error dalam proses pembelajaran. Backpropagation biasanya digunakan dalam kasus-kasus yang membutuhkan prediksi dan penentuan didalam penyelesaiannya.
Proses pertama sebelum masuk ke algoritme backpropagation adalah proses normalisasi. Proses ini digunakan untuk menyetarakan range nilai pada setiap fitur menjadi antara 0 sampai dengan 1. Proses normalisasi penting dilakukan agar salah satu fitur yang memiliki tipe nilai yang tinggi tidak menjadi dominan dan juga sebaliknya. Rumus normalisasi dapat dilihat pada persamaan berikut:
𝑥′= (0.8 × 𝑥−𝑚𝑖𝑛
𝑚𝑎𝑥−𝑚𝑖𝑛) + 0.1 (1)
Keterangan :
x
= data
x’
= data hasil normalisasi
min value
= nilai minimum
max value
= nilai maksimum
Fungsi aktivasi digunakan untuk
mengaktifkan
node
berdasarkan
hasil
perhitungan sinyal-sinyal
input
. Fungsi
aktivasi yang digunakan adalah fungsi
ReLU
. Rumus fungsi aktivasi :
𝑦 = 𝑚𝑎𝑥(0, 𝑥) , 𝑥 ≥ 0
(2)
𝑦 = 0, 𝑥 < 0
(3)
Keterangan :
x
= hasil perhitungan sinyal – sinyal
input
y
= fungsi untuk mengaktivasi nilai
x
Backpropagation memiliki 3 proses
utama,
yaitu
proses
Feedforward
,
bagian proses didalamnya. Pertama proses
penghitungan
output
pada semua node
hidden layer
z
j (j
=1,...,m) berdasarkan
inputan
x
i (i
=1,..., n).
𝑧_𝑛𝑒𝑡
𝑘= ∑
𝑛𝑖=1𝑥
𝑖× 𝑣
𝑘𝑖(4)
𝑧
𝑘= 𝑚𝑎𝑥 (0, 𝑧_𝑛𝑒𝑡
𝑘)
(5)
Keterangan :
z_net
k = nethidden
unit
k
x
i= nilai aktivasi dari unit
x
iv
kj= nilai bobot sambungan dari
x
ij keunit
z
kKedua adalah menghitung output
pada semua
node output layer
y
k (k
=1,...,n)
berdasarkan
output
pada
hidden
layer
(
z
j)yang didapatkan pada proses sebelumnya.
𝑦_𝑛𝑒𝑡
𝑘= ∑
𝑚𝑗=1𝑧
𝑗× 𝑤
𝑘𝑗(6)
𝑦
𝑘= 𝑚𝑎𝑥 (0, 𝑦_𝑛𝑒𝑡
𝑘)
(7)
Keterangan :
y_net
k = netoutput
unit
k
z
j= nilai aktivasi dari unit
z
jw
kj= nilai bobot sambungan dari
z
ij keunit
y
kSetelah proses
feedforward
selesai,
proses
selanjutnnya
adalah
proses
backpropagation
. Sama seperti proses
feedforward
, proses
backpropagation
dibagi
menjadi beberapa bagian, yang pertama
yaitu hitung
error
δk (k=1,...,n) pada
output
layer
terlebih dahulu berdasarkan output
sistem y
kdan output target t
k(k=1,...,m).
𝛿
𝑘= 𝑦
𝑘(1 − 𝑦
𝑘)(𝑡
𝑘− 𝑦
𝑘)
(8)
Keterangan:
δk
: Nilai error ouput layer
k
y
k: Nilai
output
k
sistem
t
k: Nilai
output
k
target
Kedua adalah menghitung
error
δh
(
k
=1,...,n) pada semua
node hidden layer
berdasarkan
error
pada
output
layer
(
δk)
yang didapatkan pada proses sebelumnya.
𝛿
𝑗= 𝑧
𝑘(1 − 𝑧
𝑘)(∑
𝑘∈𝑜𝑢𝑡𝑝𝑢𝑡𝑤
ℎ,𝑘𝛿
𝑘)
(9)
Keterangan:
δ
j: Nilai
error hidden layer j
z
k: Nilai
output hidden layer
k
w
j,k: Nilai bobot penghubung
hidden
layer
j
dan
output layer
k
δ
k: Nilai
error ouput layer
k
yang
terhubung dengan
hidden layer
Setelah proses
backpropagation
selesai,
proses selanjutnnya adalah proses
weight
updating
. Proses ini akan mengupdate bobot
w
berdasarkan hasil
error
δ
yang diperoleh
pada proses sebelumnya. Sama seperti
proses
backpropagation
, proses
weight
updating
dibagi menjadi beberapa bagian,
yang pertama yaitu menghitung
update
bobot penghubung
input layer
dengan
hidden layer
(
v
).
𝑣′
𝑗𝑖= 𝑣
𝑗𝑖+ (𝛼 × 𝛿
𝑗× 𝑥
𝑖)
(10)
Kedua adalah menghitung
update
bobot
penghubung
hidden layer
dengan
output
layer
(
w
).
𝑤′
𝑘𝑗= 𝑤
𝑘𝑗+ (𝛼 × 𝛿
𝑘× 𝑧
𝑗)
(11)
Untuk
iterasi
beriktnya,
lakukan
penghitungan persamaan 1-11 sebanyak
iterasi dan jumlah data yang sudah
ditentukan.
Untuk menghitung
error
digunakan
fungsi
RMSE
. Rumus untuk RMSE
𝑅𝑀𝑆𝐸 = √
∑𝑛𝑖=1𝑑𝑖2𝑛
(12)
Dimana:
RMSE
: Nilai RMSE
d
i: Selisih
output
sistem pada data ke-i
dengan
output
target pada data ke-i
n
: Jumlah Data
Karena pada awal proses ada proses
normalisasi data, untuk mengembalikan
range
nilainya
maka
perlu
proses
denormalisasi data.
𝑥
′′=
(𝑚𝑎𝑥−𝑚𝑖𝑛)×(𝑥′−0,1)0.8
+ 𝑚𝑖𝑛
(13)
Keterangan:
𝑥′′
:
Nilai denormalisasi
3. METODE
Sukarno-hatta dan jalan Coklat, Kelurahan Lowokwaru, Kota Malang. Adapun data antrian kendaraan dapat dilihat pada Tabel 1.
Tabel 1 Data Panjang Antrian Kendaraan
No Utara
(x1)
Timur (x2)
Selatan (x3)
Barat (x4)
1 75 20 55 20
2 50 35 27 17
3 33 15 35 28
4 28 12 45 7
... ... ... ... ...
... ... ... ... ...
72 48 56 80 55
73 20 5 57 5
74 33 75 42 15
75 80 75 35 11
Sebelum diproses lebih lanjut, data perlu dinormalisasi terlebih dahulu menggunakan Persamaan 1. Ini dilakukan untuk meyetarakan range semua data pada rentang 0 sampai dengan 1. Hasil normalisasi data dapat dilihat pada Tabel 2.
Tabel 2 Normalisasi Data Panjang Antrian Kendaraan
No Utara
(x1)
Timur (x2)
Selatan (x3)
Barat (x4)
1 0,600 0,233 0,467 0,329
2 0,433 0,333 0,280 0,294
3 0,320 0,200 0,333 0,420
4 0,287 0,180 0,400 0,180
... ... ... ... ...
... ... ... ... ...
72 0,420 0,473 0,633 0,729
73 0,233 0,133 0,480 0,157
74 0,320 0,600 0,380 0,271
75 0,633 0,600 0,333 0,226
Setelah data dinormalisasi kemudian lakukan proses feedforward dengan menghitung nilai keluaran pada hidden layer (z) dengan menggunakan Persamaan 4. Penelitian ini menggunkan 2 node pada hidden layer. Hasil penghitungan hidden layer bisa dilihat pada Tabel 3.
Tabel 3 Output Hidden Layer
Nilai output masing – masing node
z_net1 z_net2
0,337 0,277
Setelah output didapatkan, dilakukan perhitungan menggunakan fungsi aktivasi ReLu seperti pada Persamaan 2 atau 5. Hasil
perhitungan dapat dilihat pada Tabel 4. Tabel 4 Hasil Fungsi Aktivasi ReLU
Nilai output masing – masing node
z1 z2
0,583 0,569
Kemudian lanjut perhitungan output pada output layer menggunakan persamaan 6. Karena output yang dibutuhkan 4, maka penelitian ini menggunakan outpt layer sebanyak 4 Hasil perhitungan dapat dilihat pada Tabel 5.
Tabel 5 Output Pada Output Layer
Nilai output masing – masing node
y_net1 y_net1 y_net1 y_net1
0,383 0,388 0,35 0,265
Setelah output didapatkan, dilakukan perhitungan menggunakan fungsi aktivasi ReLu seperti pada Persamaan 2 atau 7. Hasil perhitungan dapat dilihat pada Tabel 6.
Tabel 6 Hasil Fungsi Aktivasi ReLU
Nilai output masing – masing node
y1 y1 y1 y1
0,383 0,388 0,35 0,265
Setelah proses feedforward selesai, dilanjutkan ke proses backpropagation untuk menghitung error. Pertama hitung error pada output layer (δk) menggunakan Persamaan 8. Hasil perhitungan dapat dilihat pada Tabel 7.
Tabel 7 Perhitungan erroroutput layer
Nilai error output layer
δ1 δ2 δ3 δ4
-0,059 -0,046 -0,033 -0,04
Kemudian lanjut perhitungan error pada hidden layer (δ1) menggunakan persamaan 9. Hasil perhitungan dapat dilihat pada Tabel 8.
Tabel 8 Perhitungan errorhidden layer
Nilai error pada hidden layer
δ 1 δ 2
0,2 0,187
Setelah proses backpropagation selesai, dilanjutkan ke proses weight updating. Proses ini menggunakan Persamaan 10 dan 11. Hasil perhitungan dapat dilihat pada Tabel 9 dan Tabel 10.
Tabel 9 Bobot Awal
w111 w112 w121 w122
0,210 0,200 0,300 0,150
w131 w132 w141 w142
0,330 0,420 0,400 0,250
w211 w212 w213 w214
0,230 0,440 0,120 0,130
0,390 0,180 0,450 0,300
Tabel 10 Bobot Hasil Weight Update
w111 w112 w121 w122 Proses diatas akan terus diulang sebanyak data yang digunakan dan sebanyak iterasi yang ditetukan diawal.
4. HASIL PENGUJIAN
Sub-bab ini membahas hasil dan pengujian program untuk penentuan durasi nyala lampu lalu lintas dengan menggunakan metode Backpropagation.Pengujian terdiri dari pengujian fungsi aktivasi, pengujian jumlah iterasi, pengujian jumlah node pada hidden layer, dan pengujian nilai learning rate. Setiap nilai yang dihasilkan dari keempat pengujian akan digunakanuntuk memproses data uji untuk menghasilkan nilai evaluasi yang optimal.
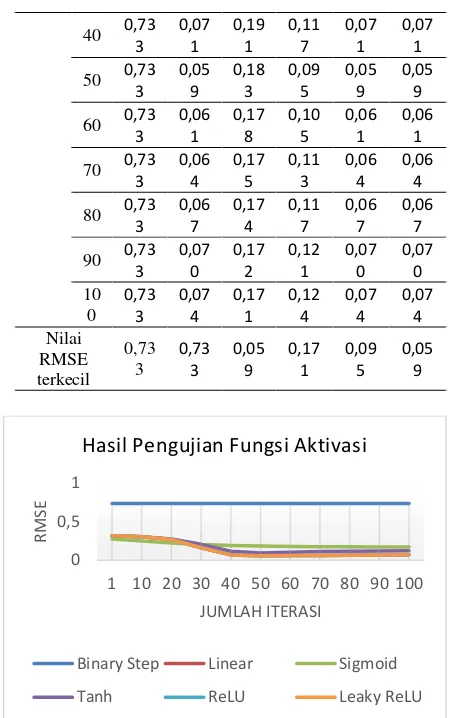
Pengujian fungsi aktivasi digunakan untuk menentukan fungsi aktivasi yang cocok pada permasalahan ini. Macam-macam fungsi aktivasi yang diuji adalah Binary Step, Linear, Sigmoid, Tanh, ReLU, dan Leaky ReLU. Berdasarkan artikel yang ditulis oleh Surmenok (2017), nilai a pada fungsi linear yang digunakan sebesar 1 dan nilai a pada fungsi Leaky ReLU sebesar 0,01. Tabel 11 dan Gambar 1 menunjukan hasil dari pengujian fungsi aktivasi.
Tabel 11 Hasil Pengujian Fungsi Aktivasi
Fungsi Aktivasi
Gambar 1 Grafik Pengujian Fungsi Aktivasi
Berdasarkan grafik pengujian fungsi aktivasi yang ditunjukan pada Gambar 1 dan Tabel 11 dapat diketahui bahwa nilai RMSE terkecil didapatkan dengan menggunakan fungsi aktivasi linear, ReLU, dan Leaky ReLU dengan nilai 0,059. Ini dikarenakan karakteristik keluaran data yang nilainya tidak mungkin lebih kecil atau sama dengan 0 dan penggunaan konstanta a = 1, sehingga hasil dari penggunaan ketiga fungsi aktivasi tersebut sama. Karena hasilnya sama, maka fungsi aktivasi yang akan digunakan adalah fungsi linear karena fungsi tersebut masih ada kemungkinan menghasilkan error yang lebih kecil dengan inisialisasi konstanta a yang tepat. Ini dikarenkan konstanta a pada fungsi linear juga berpengaruh terhadap perbaikan error (Gupta, 2018).
Karena Menggunakan fungsi aktivasi Linear maka perlu adanya pengujian tambahan yaitu pengujian konstanta a yang ada pada fungsi linear. Konstanta a berpengaruh terhadap perbaikan error sehingga perlu dicari nilai a
Hasil Pengujian Fungsi Aktivasi
Binary Step Linear Sigmoid
Tabel 12 Hasil Pengujian Konstanta a
Jumlah Iterasi
Nilai RMSE
Konstanta a (Fungsi Aktivasi = Linear,
learningrate = 0,02, dan jumlah node
hidden = 2)
1 2 3 4 5
1 0,316 0,298 0,264 0,215 0,153
10 0,305 0,157 0,056 0,061 0,062
20 0,268 0,057 0,063 0,071 0,078
30 0,164 0,062 0,073 0,084 0,095
40 0,071 0,069 0,083 0,097 0,109
50 0,059 0,075 0,093 0,109 0,122
60 0,061 0,082 0,103 0,120 0,134
70 0,064 0,089 0,111 0,129 0,146
80 0,067 0,095 0,119 0,139 0,157
90 0,070 0,102 0,127 0,148 0,168
100 0,074 0,107 0,134 0,158 0,179
Nilai RMSE Terkecil
0,059 0,057 0,056 0,061 0,062
Gambar 2 Grafik Pengujian Konstanta a Berdasarkan hasil pengujian yang ditunjukan pada Gambar 2 dan Tabel 12 dapat dilihat bahwa nilai a yang menghasilkan error terkecil adalah 3. Nilai a lebih dari 3 cenderung menghasilkan error lebih besar dikarenakan perbaikan error yang melampaui batas minimum perbaikan sehingga error semakin besar, sedangkan jika nilai a lebih kecil dari 3 juga akan menghasilkan error yang lebih besar dikarenakan perbaikan error yang terlalu kecil mengakibatkan error yang terlambat menuju optimal (Surmenok, 2017).
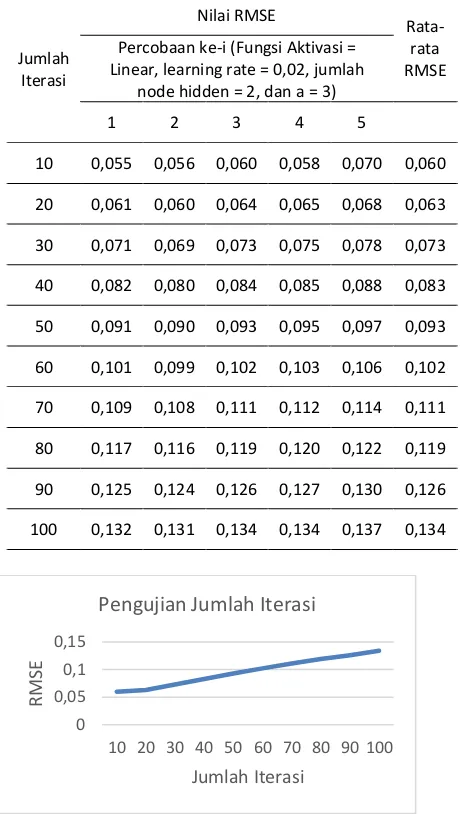
Pengujian jumlah iterasi dilakukan untuk mengetahui berapa jumlah iterasi yang optimal untuk mendapatkan nilai error terkecil pada penelitian ini. Jumlah iterasi yang diuji yaitu 10,
20, 30, 40, 50, 60, 70, 80, 90, dan 100. Setiap 1 nilai yang diuji akan dilakukan 5 kali percobaan. Tabel 13 Hasil Pengujian Jumlah Iterasi
Jumlah Iterasi
Nilai RMSE
Rata-rata RMSE Percobaan ke-i (Fungsi Aktivasi =
Linear, learning rate = 0,02, jumlah node hidden = 2, dan a = 3)
1 2 3 4 5
10 0,055 0,056 0,060 0,058 0,070 0,060
20 0,061 0,060 0,064 0,065 0,068 0,063
30 0,071 0,069 0,073 0,075 0,078 0,073
40 0,082 0,080 0,084 0,085 0,088 0,083
50 0,091 0,090 0,093 0,095 0,097 0,093
60 0,101 0,099 0,102 0,103 0,106 0,102
70 0,109 0,108 0,111 0,112 0,114 0,111
80 0,117 0,116 0,119 0,120 0,122 0,119
90 0,125 0,124 0,126 0,127 0,130 0,126
100 0,132 0,131 0,134 0,134 0,137 0,134
Gambar 3 Grafik Pengujian Jumlah Iterasi
Berdasarkan grafik pengujian jumlah iterasi yang ditunukan pada Gambar 3 dan Tabel 13 dapat dilihat bahwa nilai rata-rata RMSE terkecil didapatkan ketika iterasi = 10 yaitu sebesar 0,06. Pada Gambar 3 terlihat grafik yang konsisten menanjak setelah iterasi ke 10. Hal ini dikarenakan pada iterasi ke 10, nilai error sudah mencapai titik optimal sehingga perbaikan pada iterasi berikutnya menyebabkan error yang lebih buruk. Menurut Sharma (2017), jika suatu parameter terlalu besar maka akan menyebabkan cost atau error semakin buruk. Sehingga pada proses pengujian berikutnya akan digunakan iterasi sebanyak 10.
Pengujian jumlah node pada hidden layer dilakukan untuk mengetahui berapa jumlah node yang optimal pada hidden layer untuk mendapatkan nilai error terkecil pada penelitian 0,05
0,055 0,06 0,065
1 2 3 4 5
RMSE
Nilai Konstanta a
Hasil Pengujian Konstanta a
0 0,05 0,1 0,15
10 20 30 40 50 60 70 80 90 100
RMSE
Jumlah Iterasi
ini. Menurut Heaton (2005) jumlah nodehidden layer yang baik adalah 2/3 dari jumlah input ditambah dengan jumlah output. Karena jumlah input adalah 4 dan jumlah output adalah 4 maka menurut Heaton jumlah node pada hidden layer adalah 6 sampai dengan 7 buah node. Sehingga jumlah node yang akan diuji yaitu sebesar 1, 2, 3, 4, 5, 6, dan 7.
Tabel 14 Hasil Pengujian Jumlah Node Pada Hidden layer
Jumlah Node
Nilai RMSE
Rata-rata RMSE Percobaan ke-i (Fungsi Aktivasi = Linear,
learning rate = 0,02, jumlah iterasi = 10, dan a = 3)
1 2 3 4 5
1 0,108 0,069 0,084 0,089 0,148 0,100
2 0,055 0,057 0,065 0,058 0,062 0,059
3 0,069 0,063 0,068 0,066 0,075 0,068
4 0,063 0,070 0,071 0,076 0,065 0,069
5 0,060 0,062 0,063 0,073 0,067 0,065
6 0,063 0,060 0,062 0,061 0,065 0,062
7 0,072 0,089 0,059 0,057 0,060 0,067
Gambar 4 Grafik Pengujian Jumlah Node pada Hidden Layer
Berdasarkan grafik pengujian jumlah
node
pada
hidden layer
yang ditunjukkan
pada Gambar 4 dan Tabel 14 dapat dilihat
bahwa pada jumlah
node
sebanyak 2
memiliki nilai rata-rata
RMSE
yang terkecil
dengan nilai
error
0,059. Sedangkan jumlah
node
sebanyak 1 memiliki nilai
RMSE
yang
berbeda dan jauh lebih besar dari yang
lainnya dikarenakan kurangnya variasi.
Selain itu, jika jumlah node kurang dari 2
akan terjadi kondisi
underfitting
, yaitu
kondisi dimana jaringan tidak dapat dapat
memepelajari pola yang ada dengan baik
yang mengakibatkan kurang baiknya hasil
peramalan. Tetapi ketika jumlah node terlalu
banyak
maka
akan
terjadi
kondisi
overfitting,
yaitu kondisi dimana jaringan
kehilangan kemampuan dalam generalisasi
dan mempelajari pola-pola yang diuji.
Sehingga untuk proses selanjutnya akan
digunakan jumlah
node
pada
hidden layer
sebanyak 2.
Pengujian nilai
learning rate
dilakukan
untuk mengetahui berapa nilai
learning rate
yang optimal untuk mendapatkan nilai
error
terkecil pada penelitian ini. Nilai
learning
rate
yang digunakan yaitu 0,01; 0,02; 0,03;
0,04; 0,05; 0,06; 0,07; 0,08; 0,09; dan 0,1.
Setiap 1 nilai yang diuji akan dilakukan 5
kali percobaan.
Tabel 15 Hasil Pengujian Nilai Learning Rate
Nilai Learning
Rate
Nilai RMSE
Rata-rata RMSE Percobaan ke-i (Fungsi Aktivasi = Linear, jumlah iterasi = 10, jumlah Node Hidden = 2, dan a = 3)
1 2 3 4 5
0,01 0,0925 0,0689 0,0975 0,0873 0,0838 0,0860
0,02 0,0597 0,0674 0,0603 0,0599 0,0586 0,0612
0,03 0,0641 0,0630 0,0623 0,0591 0,0599 0,0617
0,04 0,0650 0,0686 0,0604 0,0636 0,0626 0,0640
0,05 0,0679 0,0712 0,0696 0,0743 0,0675 0,0701
0,06 0,0709 0,0675 0,0692 0,0700 0,0692 0,0694
0,07 0,0722 0,0704 0,0723 0,0732 0,0693 0,0715
0,08 0,0820 0,0842 0,0849 0,0813 0,0824 0,0830
0,09 0,0915 0,0910 0,0930 0,0896 0,0932 0,0917
0,1 0,1019 0,0974 0,0930 0,0999 0,0999 0,0984
Gambar 5 Grafik Pengujian Nilai Learning Rate
0 0,05 0,1 0,15
1 2 3 4 5 6 7
RMSE
Jumlah Node
Pengujian Jumlah Nodepada Hidden Layer
0 0,05 0,1 0,15
0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,1
RMSE
Nilai Learning Rate
Berdasarkan grafik pengujian nilai learning rate yang ditunjukkan pada Gambar 5 dan Tabel 15 dapat dilihat bahwa learning rate dengan nilai 0,02 memiliki nilai rata-rata RMSE yang paling kecil dengan nilai 0, 0612. Nilai learning rate lebih dari 0,02 cenderung menghasilkan error lebih besar dikarenakan perbaikan error yang melampaui batas minimum perbaikan sehingga error semakin besar, sedangkan jika nilai learning rate lebih kecil dari 0,02 juga akan menghasilkan error yang lebih besar dikarenakan perbaikan error yang terlalu kecil mengakibatkan error yang terlambat menuju optimal (Surmenok, 2017). Sehingga pada penelitian ini didapatkan nilai learning rate paling optimal sebesar 0,02.
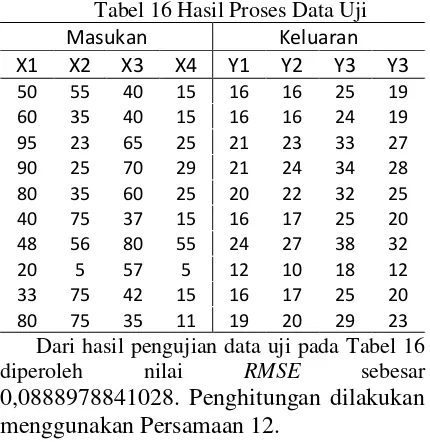
Setelah semua pengujian dilakukan mulai dari pengujian fungsi aktivasi, pengujian jumlah iterasi, pengujian jumlah node pada hidden layer, dan pengujian nilai learning rate, selanjutnya dilakukan pemrosesan data uji mengggunakan nilai-nilai hasil pengujian. Fungsi aktivasi yang digunakan adalah fungsi Linear dengan a = 3, jumlah iterasi yanng digunakan adalah 10, jumlah hiddenlayer adalah 1, jumlah node pada hiddenlayer adalah 2, dan nilai learningrate sebesar 0,02.
Tabel 16 Hasil Proses Data Uji
Masukan Keluaran
X1 X2 X3 X4 Y1 Y2 Y3 Y3
50 55 40 15 16 16 25 19
60 35 40 15 16 16 24 19
95 23 65 25 21 23 33 27
90 25 70 29 21 24 34 28
80 35 60 25 20 22 32 25
40 75 37 15 16 17 25 20
48 56 80 55 24 27 38 32
20 5 57 5 12 10 18 12
33 75 42 15 16 17 25 20
80 75 35 11 19 20 29 23
Dari hasil pengujian data uji pada Tabel 16
diperoleh nilai RMSE sebesar
0,0888978841028. Penghitungan dilakukan
menggunakan Persamaan 12.
5. KESIMPULAN DAN SARAN
Dari hasil penelitian didapatkan bahwa metode Backpropagation dapat digunakan untuk menentukan durasi nyala lampu lalu lintas bedasarkan panjang antrian kendaraan dengan nilai RMSE sebesar
0,0888978841028
. Penelitian selanjutnya dapat menambahkan input dan juga menggunakan tambahan algoritma lain seperti algoritma optimasisehingga output bisa lebih baik. Selain itu, penggunkaan sensor berbasis citra bisa digunakan untuk membuat penelitian ini real-time.
6. REFERENSI
Badan Pusat Statisik. (2014). Perkembangan Jumlah Kendaraan Bermotor Menurut Jenis tahun 1987-2013. Dipetik Mei 29,
2017, dari
https://www.bps.go.id/linkTabelStatis/v iew/id/1413
Badan Pusat Statistik. (2016). Panjang Jalan Menurut Jenis Permukaan,1957-2015 (Km). Dipetik Mei 29, 2017, dari https://www.bps.go.id/linkTableDinami s/view/id/820
Barnston, A. G. (1992). Correspondance Among the Correlation, RMSE, and Heidke Foreecast Verification Measure; Refinement of the Heidke Score. Climate Analysis Center, NMC/NWS/NOAA, Washington, D.C., VII, 699-709.
G, E. A., Djakfar, L., & Wicaksono, A. (2014). Manajemen Lalu Lintas Pada Simpang Borobudur Kota Malang. JTIIK, VIII, 169.
Gupta, D. (2018, January 3). Fundamentals of Deep Learning – Activation Functions and When to Use Them? Diambil kembali dari Analytics Vidhya: https://www.analyticsvidhya.com/blog/ 2017/10/fundamentals-deep-learning-activation-functions-when-to-use-them/ Gutierrez, D. D. (2015). Machine Learning And
Data Science (1st ed.).
Jauhari, D., Himawan, A., & Dewi, C. (2016). Prediksi Distribusi Air PDAM Menggunakan Metode Jaringan Syaraf Tiruan Backpropagation Di PDAM Kota Malang. III.
Kusmagi, M. A. (2010). Selamat Berkendara Di Jalan Raya (Vol. 1). Jakarta.
Panchal, G., Ganatra, A., Kosta, Y. P., & Panchal, D. (2011). Behaviour Analysis of Multilayer Perceptrons with Multiple Hidden Neurons and Hidden Layers. International Journal of Computer Theory and Engineering, 3(2), 1-6. Royani, T., Haddadnia, J., & Alipoor, M. (2013).
International Journal of Computer and Electrical Engineering, V(1), 142-146. SB, D. (2011). Budaya Tertib Lalu Lintas (Vol.
I). Jakarta.
Sharma, A. (2017). Understanding Activation Functions in Deep Learning. Dipetik
Januari 14, 2018, dari
https://www.learnopencv.com/understa nding-activation-functions-in-deep-learning/
Sharma, S. (2017). Towards Data Science. Dipetik January 4, 2018, dari https://towardsdatascience.com/epoch-
vs-iterations-vs-batch-size-4dfb9c7ce9c9
Sivanandam, S. N., Sumathi, S., & Deepa, S. N. (2006). Introduction to Neura Network Using Matlab 6.0 (Vol. II). New Delhi. Smith, L. N. (2017). Cyclical Learning Rates for
Training Neural Networks. Cornell University Library, 6, 1-10.
Surmenok, P. (2017). Towards Data Science. Dipetik Januari 13, 2018, dari https://towardsdatascience.com/estimati ng-optimal-learning-rate-for-a-deep-neural-network-ce32f2556ce0
Wicaksana, M. D., Azizie, F. A., Amirullah, I., & Nurtanio, I. (2014). Sistem Pengambilan Keputusan Waktu Perpindahan Lampu Lalu Lintas Menggunakan Metode Neuro-Fuzzy Pada Sistem Tranportasi Cerdas. 1-8. Yohannes, E., Mahmudy, W. F., & Rahmi, A.