ANALISIS PENGUKURAN ANALISIS PENGUKURAN
BIOMEKANIKA BIOMEKANIKA
RAPID ENTIRE BODY ASSESSMENT (REBA) RAPID ENTIRE BODY ASSESSMENT (REBA) DAN RAPID UPPER LIMB ASSESSMENT (RULA) DAN RAPID UPPER LIMB ASSESSMENT (RULA)
A. TUJUAN PRAKTIKUM A. TUJUAN PRAKTIKUM
1.
1. Mampu meraMampu merancang mncang metode kerja etode kerja didasarkan didasarkan pada prinspada prinsip–prinsipip–prinsip biomekanika.
biomekanika. 2.
2. Mampu melakukMampu melakukan analisa an analisa terhadap beban terhadap beban kerja yang terjadi kerja yang terjadi dalam suatdalam suatuu sistem kerja dengan metode biomekanika
sistem kerja dengan metode biomekanika 3.
3. Mengetahui postur Mengetahui postur kerja yang kerja yang baik menurut baik menurut prinsip REBprinsip REBA dan RULA.A dan RULA. 4.
4. Melakukan Melakukan perhitungan perhitungan portur kerja portur kerja dengan metode dengan metode REBA REBA dan RULA.dan RULA. 5.
5. Mampu mengaplikMampu mengaplikasikan asikan metode REBA metode REBA dan RUdan RULA untuk LA untuk mengurangi resikomengurangi resiko kerja.
kerja. 6.
6. Mampu memaMampu memahami keterbahami keterbatasan mtasan manusia daanusia dari beban ri beban kerja yangkerja yang dibebankan pada anggota tubuh manusia.
dibebankan pada anggota tubuh manusia.
B.
C.
C. LANDLANDASAN ASAN TEORTEORII 2.1.
2.1. Analisis Pengukuran Mekanika Tubuh Manusia dengan MetodeAnalisis Pengukuran Mekanika Tubuh Manusia dengan Metode BiomekanikaBiomekanika B
Biioommeekkaanniikkaa mmeerruuppaakkaann ssaallaahh ssaattuu ddaarrii eemmppaatt bbiiddaanngg ppeenneelliittiiaann in
infforormmaassii hhaassiill ererggoonnoomimi.. YYaaiittuu ppeenneleliititiaann tetennttaanngg kkeekkuuaattaann ffiisisikk mmaannususiiaa yyaanngg mmeennccaakkuupp kkeekkuuaattaann aattaauu ddaayyaa ffiissiikk mmaannuussiiaa kkeettiikkaa bbeekkeerrjjaa ddaann m
meemmppeellaajjaarrii bbaaggaaiimmaannaa ccaarraa kkeerrjjaa sseerrttaa ppeerraallaattaann hhaarruuss ddiirraannccaanngg aaggaarr se
sessuauaii ddenenggaann kkeemamammppuauann ffiissiikk mmaannuussiiaa kkeettiikkaa memellaakkuukkaann aakkttiviviittaass kkererjjaa tersebut.
tersebut. D
Daallaamm bbiioommeekkaanniikk iinnii bbaannyyaakk ddiissiipplliinn iillmmuu yyaanngg mmeennddaassaarrii ddaann be
berrkkaaititanan uuntntukuk dadapapatt memenonopapangng peperrkkeembmbaangnganan bibiomomekekaannikik.. DiDissiiplplinin ililmumu in
inii titidadakk teterlrlepepasas dadariri kokompmplelekksnsnyaya mamasasalalahh yayangng diditatangngananii ololeheh bibiomomekekananikik ini
2.
2.2.2. KoKonsnseepp BiBiomomekekaaninikaka Bio
Biomekmekanianikaka dikdiklaslasififikaikasisikankan menjmenjadiadi 2,2, yaiyaitu:tu: 1.
1. GenGenereralal BioBiomemechachanicnicss Ad
Adalalahah babagigianan dadariri BiBiomomekekananikikaa yayangng berberbibicacarara memengngenenaiai HuHukukum- m-h
huukkuumm ddaann kkoonnsseepp––kkoonnsseepp ddaassaarr yyaanngg mmeemmppeennggaarruuhhii ttuubbuuhh oorrggaanniikk ma
manunusisiaa babaikik dadalalam m poposisisisi didiamam mamaupupunun berbergergerakak.. Dib
Dibagagii memenjnjadadii 2,2, yayaititu:u: a.
a. Biostatics Biostatics aaddaallaah h bbaaggiiaan n ddaarri i bbiioommeekkaanniikkaa uummuumm yyaanngg hhaannyyaa me
mengngananalalisisisis tutububuh ph padada pa pososisisi di diaiamm atatauau bebergergerarak pk padada ga gararisis lurlurusus de
dengangann kekececepapatatann seseraragagamm ((uniformuniform).). b.
b. Biodinamics Biodinamics adadalalah bah bagagiaian dan dari bri bioiomekmekananikik umumumum yanyang beg berkrkaiaitantan de
dengangan gn gamambabararann gegerarakakan–gn–gererakakanan tutububuhh tatanpnpaa memempmperertitimbmbanangkgkanan g
gayayaa yayangng teterrjajaddii ((kkiinenemmatatikik)) dadann gegerarakkaann yayangng didisesebbababkkaann gagayaya yayangng be
bekekerjrjaa dadalalamm tutububuhh (k(kininetetikik).). 2.
2. OccupatOccupationalional BiomeBiomechanicchanicss D
Diiddeeffiinniissiikkaann sseebbaaggaaii bbaaggiiaann ddaarri i bbiioommeekkaanniikk tteerraappaann yyaanngg me
mempmpelelajajararii ininttererakakssii fifisisikk aantntaara pera pekkererjjaa dedenngagann memessinin,, mamateterriaial l ddaann pe
perraallaattaan n ddeenngganan ttuujjuuaann uunnttukuk mmememiininimmaalliissaassii kkeelluuhahann papaddaa ssiisstteemm keran
kerangka gka otototot agar agar prodproduktivuktivitasitas kerjkerjaa dapadapatt meningmeningkat.kat. S
Seteteellaahh memelliihhaatt kkllaassififiikkaassii ddii aattaass,, mmaakkaa ddalalaamm pprraakkttiikkuumm kkiittaa iinnii da
dappaatt kkiittaa kkaattegegooririkkaann ddaallaamm bbiioommeekkaanniikk OccupaOccupationational l BiomBiomechaechanicsnics.. U
Untntukuk lelebibihh jjelelaassnynya,a, didi ssiinini akakanan kkiita ta babahahass tetentntaangng aannatatomomii tutubbuhuh yayanngg menja
menjadidi dasadasarr perhperhitungitungan danan dan pengapenganalisnalisaan biaan biomekanomekanik.ik.
2.3.
2.3. ANALISIS MEKANIKANALISIS MEKANIK 2.3.1.
2.3.1. Maximum Maximum Permissible Permissible Limit Limit (MPL)(MPL)
Merupakan batas besarnya gaya tekan pada segmen L5/S1 dari Merupakan batas besarnya gaya tekan pada segmen L5/S1 dari kegiatan pengangkatan dalam satuan Newton yang distandarkan oleh kegiatan pengangkatan dalam satuan Newton yang distandarkan oleh NIOSH (National Instiute of Occupational Safety and Health) tahun NIOSH (National Instiute of Occupational Safety and Health) tahun
1981. Besar gaya tekannya adalah di bawah 6500 N pada L5/S1. 1981. Besar gaya tekannya adalah di bawah 6500 N pada L5/S1. Sedangkan batasan gaya angkatan normal
Sedangkan batasan gaya angkatan normal (the Action Limit (the Action Limit ) sebesar) sebesar 3500 pada L5
3500 pada L5/S1. Sehi/S1. Sehinggangga, apabil, apabila Fc < AL (amana Fc < AL (aman),), AL < Fc < MPLAL < Fc < MPL (perlu hati-hati) dan apabila Fc > MPL (berbahaya). Batasan gaya (perlu hati-hati) dan apabila Fc > MPL (berbahaya). Batasan gaya angkat maksimum yang diijinkan , yang direkomendasikan NIOSH angkat maksimum yang diijinkan , yang direkomendasikan NIOSH (1991) adalah berdasarkan gaya tekan sebesar 6500 N pd L5/S1 , (1991) adalah berdasarkan gaya tekan sebesar 6500 N pd L5/S1 , namun hanya 1% wanita dan 25% pria yang diperkirakan mampu namun hanya 1% wanita dan 25% pria yang diperkirakan mampu melewati batasan angkat ini.
melewati batasan angkat ini.
Perlu diperhatikan bahwa nilai dari analisa biomekanika adalah Perlu diperhatikan bahwa nilai dari analisa biomekanika adalah rentang postur atau posisi aktifitas kerja, ukuran beban, dan ukuran rentang postur atau posisi aktifitas kerja, ukuran beban, dan ukuran manusia yang dievaluasi. Sedangkan kriteria keselamatan adalah manusia yang dievaluasi. Sedangkan kriteria keselamatan adalah berdasar pada beban tekan (
berdasar pada beban tekan (compcompressiression on load load ) pada intebral disk) pada intebral disk antar
antara Lumbar noa Lumbar nomor lima damor lima dan sacrum non sacrum nomor satmor satuu (L5/S(L5/S1). Untuk1). Untuk mengetahui lebih jelas lagi L5/S1 dapat dilihat pada gambar dibawah mengetahui lebih jelas lagi L5/S1 dapat dilihat pada gambar dibawah ini
terjadi dengan relative frekuensi pada L4/L5 dan L5/S1. Kebanyakan penyakit-penyakit tulang belakang adalah merupakan hernia pada intervertebral disk yaitu keluarnya inti intervertebral (pulpy nucleus) yang disebabkan oleh rusaknya lapisan pembungkus intervertebral disk .
Evan dan Lissner (1962) dan Sonoda (1962) melakukan penelitian dengan uji tekan pada spine (tulang belakang). Mereka menemukan bahwa tulang belakang yang sehat tidak mudah terkena hernia, akan tetapi lebih mudah rusak/retak jika disebabkan oleh beban yang ditanggung oleh segmen tulang belakang (spinal) dan yang terjadi dengan diawali oleh rusaknya bagian atas/ bawah segmen tulang belakang (the castilage end-plates in the vertebrae). Retak kecil yang terjadi pada vertebral akan menyebabkan keluarnya cairan dari dalam vertebrae menuju kedalam intervetrebae disc dan selanjutnya mengakibatkan degenerasi (kerusakan) pada disk. Dari kejadian ini dapat ditarik kesimpulan bahwa degenerasi adalah merupakan prasyarat untuk terjadinya hernia pada intervertebral disc yang pada gilirannya akan menjadi penyebab umum timbulnya rasa nyeri pada bagian punggung bawah (low-back pain).
Dalam gerakan pada sistem kerangka otot, otot bereaksi terhadap tulang untuk mengendalikan gerak rotasi di sekitar sambungan tulang, beberapa sistem pengungkit menjelaskan hal tersebut. Dalam sistem ini otot bertindak sebagai sistem mekanis yang berfungsi untuk suplai energi kinetik dan gerakan angular.
Pada Gambar digambarkan sistem pengungkit yang terdapat pada anggota tubuh manusia yang melakukan aktivitas kerja.
Gambar 2.3 sistem pengungkit
a. Sistem pengungkit I :
Contoh sistem pengungkit I :
a. Otot Triceps menarik ulna untuk menggerakkan siku
b. Otot Quadriceps menarik tibia melalui patella untuk menggerakkan lutut
Perlu kita ketahui bahwa seorang operator bekerja tidak hanya lengan saja yang mengeluarkan tenaga, tetapi bagian tubuh yang lain seperti punggung, paha, betis dll.
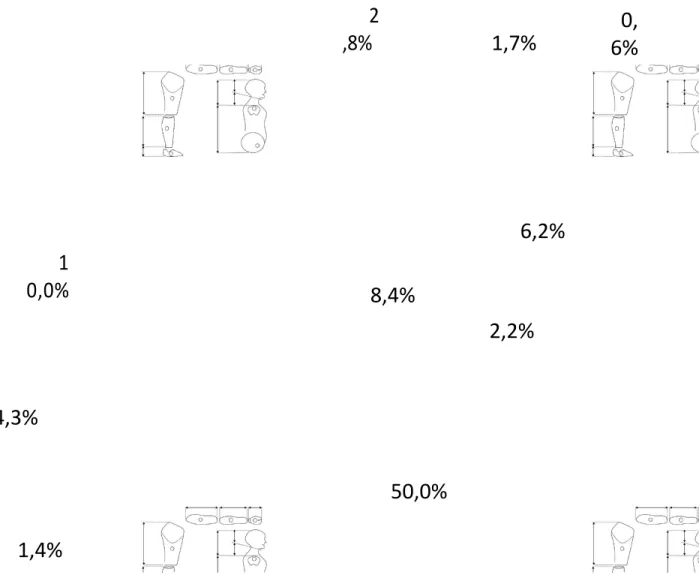
Dalam biomekanik perhitungan guna mencari moment dan gaya dapat dilakukan dengan cara menghitung gaya dan mement secara parsial atau menghitung tiap segmen yang menyusun tubuh manusia. Berat dari masing – masing segmen dibawah ini didapat dari besarnya prosentase dikali dengan gaya berat dari orang tersebut.
2 ,8% 1,7% 0, 6% 6,2% 1 0,0% 8,4% 4,3% 2,2% 50,0% 1,4%
Gambar 2.4 Persentase Persegmen tubuh (Tayyari, 1997)
Oleh karena itu, di bawah ini merupakan perhitungan (secara manual) dalam praktikum ini, yaitu dihitung tiap segmen yang mempengaruhi tulang belakang dalam melakukan aktivitas pengangkatan, kecuali segmen kaki:
1. Telapak tangan Fyw Fxw θ1 Mw SL1 ΣFy = 0
ΣFx = 0 -- tidak ada gaya horisontal.
ΣM = 0
WH= 0,6% x WbadanFyw= Wo/2 + WH
Mw = (Wo/2 + WH) x SL1 x cos θ1
WH WO
NB = Gaya pada lengan atas dikalikan dua Moment dikali dua agar benda utuh satu
Dengan menggunakan teknik perhitungan keseimbangan gaya pada tiap segmen tubuh manusia, maka didapat moment resultan pada L5/S1. Kemudian untuk mencapai keseimbangan tubuh pada aktivitas pengangkatan, moment pada L5/S1 tersebut diimbangi gaya otot pada spinal erector (FM) yang cukup besar dan juga gaya perut (FA) sebagai pengaruh tekanan perut (PA) atau Abdominal Pressure yang berfungsi untuk membantu kestabilan badan karena pengaruh momen dan gaya yang ada seperti model pada gambar 2.5 dibawah ini.
Gambar 2.8 Model sederhana dari punggung bawah (low back ) yang diteliti oleh chaffin untuk analisis terhadap aktifitas angkat Koplanar Statis. (Chaffin, 1984)
Gaya otot pada spinal erector dirumuskan sebagai berikut:
= gaya otot pada spinal erector ( newton )
E =Panjang Lengan momen otot spinal erector dari L5/S1 (estimasi 0,05 m sumber: Nurmianto ; 1996)
= MT = moment resultan pada L5/S1 FA = gaya perut (newton)
D = jarak dari gaya perut ke L5/S1
(estimasi 0,11 m sumber: Nurmianto ; 1996)
Untuk mencari Gaya Perut (FA), maka perlu dicari Tekanan Perut (PA) dengan persamaan:
(N/Cm
2)
(newton)
W tot = Wo +2 WH + 2 W LA+ 2 W UA + Wt Keterangan: PA = Tekanan Perut AA = Luas Diafragma (465cm2) ΘH = Sudut inklinasi perut ΘT = Sudut inklinasi kakiKemudian gaya tekan/kompresi pada L5/S1 dirumuskan sbb: F C = W tot . cos ϴ4 – F A + F m
(newton)
1.3.2. Recommended Weight Limit (RWL)
Recommended Weight Limit merupakan rekomendasi batas beban yang dapat diangkat oleh manusia tanpa menimbulkan cidera meskipun pekerjaan tersebut dilakukan secara repetitive dan dalam jangka waktu yang cukup lama. RWL ini ditetapkan oleh NIOSH pada tahun 1991 di Amerika Serikat.
Persamaan NIOSH berlaku pada keadaan :
a. Beban yang diberikan adalah beban statis, tidak ada penambahan ataupun pengurangan beban di tengah – tengah pekerjaan.
b. Beban diangkat dengan kedua tangan.
c. Pengangkatan atau penurunan benda dilakukan dalam waktu maksimal 8 jam.
d. Pengangkatan atau penurunan benda tidak boleh dilakukan saat duduk atau berlutut.
e. Tempat kerja tidak sempit.
Berdasarkan sikap dan kondisi sistem kerja pengangkatan beban dalam proses pemuatan barang yang dilakukan oleh pekerja dalam eksperimen, penulis melakukan pengukuran terhadap faktor – faktor yang mempengaruhi dalam pengangkatan beban dengan acuan ketetapan NIOSH (1991).
Gambar 2.6 Recommended Weight Limit
Persamaan untuk menentukan beban yang direkomendasikan untuk diangkat seorang pekerja dalam kondisi tertentu menurut NIOSH adalah sbb:
RWL = LC x HM x VM x DM x AM x FM x CM
Keterangan:
LC = konstanta pembebanan = 23 kg HM = faktor pengali horizontal = 25 / H
DM = Faktor pengali perpindahan
AM = Faktor pengali asimetrik
Catatan (lihat gambar ) Keterangan:
H = jarak beban terhadap titik pusat tubuh V = jarak beban terhadap lantai
D =jarak perpindahan beban secara vertical A = sudut simetri putaran yang dibentuk tubuh
Untuk Frekuensi Pengali ditentukan dengan menggunakan tabel FM dibawah ini dengan mengetahui frekuensi angkatan tiap menitnya dan juga nilai V dalam inchi.
Dari persamaan yang ditetapkan NIOSH tersebut, terdapat perbedaan faktor pengali jarak vertikal untuk pekerja Indonesia, sehingga perlu penyesuaian terhadap nilai perkiraan berat beban yang direkomendasikan untuk diangkat. Adanya perbedaan ini karena faktor pengali vertikal sangat bergantung pada antropometri ketinggian knuckle (jarak vertikal dari lantai ke ujung jari tangan dengan posisi lurus ke bawah). Perumusan faktor pengali vertikal yang dihasilkan oleh NIOSH adalah :
Sedangakan dari hasil penelitian di dapat bahwa untuk pekerja industri Indonesia faktor pengali jarak :
Setelah nilai RWL diketahui, selanjutnya perhitungan Lifting Index , untuk mengetahui index pengangkatan yang tidak mengandung resiko cidera tulang belakang, dengan persamaan :
LI =
Load Weight
=
L
Recomm ende d Weight Limit
RWL
Keterangan:
Jika LI ≤ 1, maka aktivitas tersebut tidak mengandung resiko cidera tulang belakang. Jika LI > 1, maka aktivitas tersebut mengandung resiko cidera tulang belakang
Dalam tubuh manusia terdapat tiga jenis gaya (Winter, 1979):
1. Gaya Gravitasi, yaitu gaya yang melalui pusat massa dari tiap segmen tubuh manusia dengan arah kebawah. Besar gayanya adalah massa dikali percepatan gravitasi (F = m g)
2. Gaya Reaksi, yaitu gaya yang terjadi akibat beban pada segmen tubuh atau berat segmen tubuh itu sendiri.
3. Gaya otot, yaitu gaya yang terjadi pada bagian sendi, baik akibat gesekan sendi atau akibat g aya pada otot yang melekat pada sendi. Gaya ini menggambarkan besarnya momen otot. Tubuh manusia terdiri dari 6 link (Chaffin & Anderson, 1984), yaitu: 1. Link lengan bawah, dibatasi joint telapak tangan dan siku.
2. Link lengan atas, dibatasi joint siku dan bahu. 3. Link punggung, dibatasi joint bahu dan pinggul.
Postur kerja yang baik sangat ditentukan oleh pergerakan organ tubuh saat bekerja. Pergerakan yang dilakukan saat bekerja meliputi: flexion, extension, abduction, adduction, rotation, pronation dan supination. Flexion adalah gerakan dimana sudut antara dua tulang terjadi pengurangan. Extension adalah gerakan merentangkan (stretching) dimana terjadi peningkatan sudut antara dua tulang. Abduction adalah pergerakan menyamping menjauhi dari sumbu tengah (the median plane) tubuh. Adduction adalah pergerakan kearah sumbu tengah tubuh (the median plane). Rotation adalah gerakan perputaran bagian atas lengan atau kaki depan. Pronation adalah perputaran bagian tengah (menuju kedalam) dari anggota tubuh. Supination adalah perputaran ke arah samping (menuju keluar) dari anggota tubuh.
Cumulative trauma disorders (dapat juga disebut sebagai Repetitive Motion Injuries atau Musculoskeletal Disorders) adalah cidera pada sistem kerangka otot yang semakin bertambah secara bertahap sebagai akibat dari trauma kecil yang terus-menerus yang disebabkan oleh desain yang buruk yaitu desain alat/sistem kerja yang membutuhkan gerakan tubuh dalam posisi yang tidak normal serta penggunaan perkakas/handtools atau alat lainnya yang terlalu sering. Empat faktor penyebab timbulnya CTD:
1. Penggunaan gaya yang berlebihan selama gerakan normal.
2. Gerakan sendi yang kaku yaitu tidak berada pada posisi normal. Misalnya, bahu yang terlalu terangkat, lutut yang terlalu naik, punggung terlalu membungkuk dan lain-lain.
3. Perulangan gerakan yang sama secara terus-menerus.
4. Kurangnya istirahat yang cukup untuk memulihkan trauma sendi.
Gejala yang berhubungan dengan CTD antara lain adalah terasa sakit atau nyeri pada otot, gerakan sendi yang terbatas dan terjadi pembengkakan. Jika gejala ini dibiarkan maka akan menimbulkan kerusakan permanen.
a. Rapid Entire Body Assessment (REBA)
Rapid Entire Body Assessment adalah sebuah metode yang dikembangkan dalam bidang ergonomi dan dapat digunakan secara cepat untuk menilai posisi kerja atau postur leher, punggung, lengan, pergelangan tangan dan kaki seorang operator. Selain itu metode ini juga dipengaruhi oleh faktor coupling, beban eksternal yang ditopang oleh tubuh serta aktivitas pekerja. Penilaian dengan menggunakan REBA tidak membutuhkan waktu lama untuk melengkapi dan melakukan scoring general pada daftar aktivitas yang mengindikasikan perlu adanya pengurangan resiko yang diakibatkan postur kerja operator (McAtamney,2000).
Penilaian menggunakan metode REBA yang telah dilakukan oleh Dr. Sue Hignett dan Dr. Lynn McAtamney melalui tahapan-tahapan sebagai berikut:
Tahap 1 : Pengambilan data postur pekerja dengan menggunakan bantuan video atau foto.
Tahap 2 : Penentuan sudut-sudut dari bagian tubuh pekerja. Setelah didapatkan hasil rekaman dan foto postur tubuh dari pekerja dilakukan perhitungan besar sudut dari masing-masing segmen tubuh yang meliputi punggung (batang tubuh), leher, lengan atas, lengan bawah, pergelangan tangan dan kaki. Pada metode REBA segmen-segmen tubuh tersebut dibagi menjadi dua kelompok, yaitu grup A dan B. Grup A meliputi punggung (batang tubuh), leher dan kaki. Sementara grup B meliputi lengan atas, lengan bawah dan pergelangan tangan. Dari data sudut segmen tubuh pada masing-masing grup dapat diketahui skornya, kemudian dengan skor tersebut digunakan untuk melihat tabel A untuk grup A dan tabel B untuk grup B agar diperoleh skor untuk masing-masing tabel.
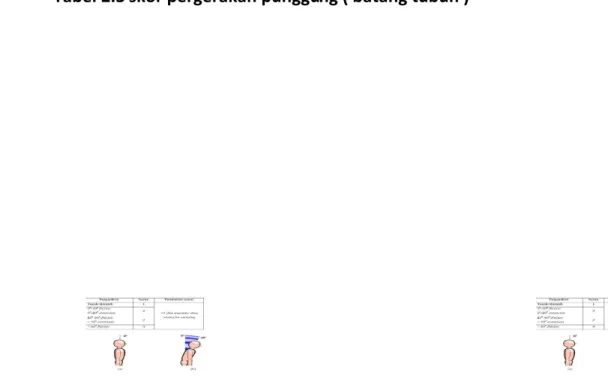
Tabel 2.3 skor pergerakan punggung ( batang tubuh )
Gambar 2.7 Range pergerakan punggung (a) postur alamiah, (b) postur 0⁰ - 2⁰ flexion, (c) postur 20⁰ - 60⁰ flexion, (d) postur 60⁰ flextionatau lebih.
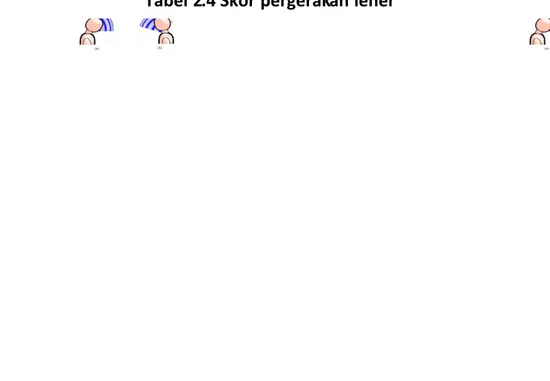
Tabel 2.4 Skor pergerakan leher
Gambar 2.8 Range pergerakan leher (a) postur 20⁰ atau lebih flexion, (b) extension.
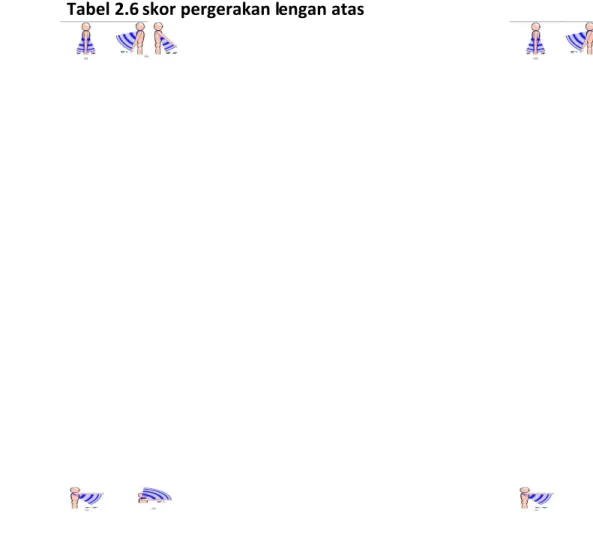
Tabel 2.6 skor pergerakan lengan atas
Gambar 2.10 Range pergerakan lengan atas (a) postur 20 ⁰ flexion dan extension, (b) postur 20⁰ atau lebih extensiondan postur 20⁰ - 45⁰ flexion, (c) postur 45⁰-90⁰ flexion, (d) postur 90⁰ atau lebih flexion.
Tabel 2.7 Skor pergerakan lengan bawah
Gambar 2.11 Range pergerakan lengan bawah (a) postur 60⁰ – 100⁰ flexion. (b) postur 60⁰ atau kurang flexiondan 100⁰ atau lebih flexion
Tabel 2.8 skor pergerakan pergelangan tangan
Gambar 2.12 Range pergerakan pergelangan tangan (a) postur alamiah, postur 0-15⁰ flexion maupun extension, (c) postur 15⁰ atau lebih flexion, (d) postur 15⁰ atau lebih extension.
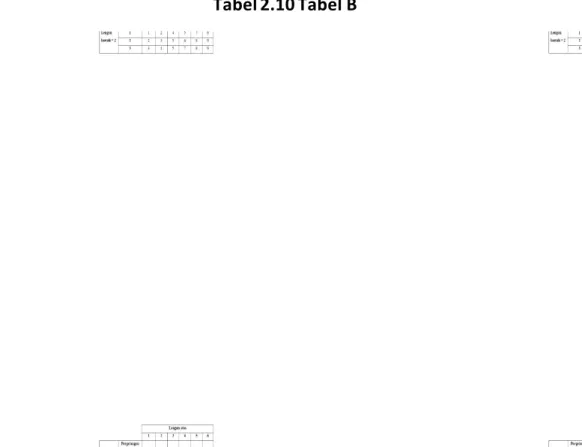
Tabel 2.10 Tabel B
Hasil skor yang diperoleh dari tabel A dan tabel B digunakan untuk melihat tabel C sehingga didapatkan skor dari tabel C.
Tahap 3 : Penentuan berat benda yang diangkat, coupling dan aktivitas pekerja.
Selain skoring pada masing-masing segmen tubuh, faktor lain yang perlu disertakan adalah berat beban yang diangkat, coupling dan aktivitas pekerjanya. Masing-masing faktor tersebut juga mempunya kategori skor.
Tabel 2.12 skor berat beban yang diangkat
Tabel 2.13 Tabel coupling
Tahap 4 : Perhitungan nilai REBA untuk postur yang bersangkutan.
Setelah didapatkan skor dari tabel A kemudian dijumlahkan dengan skor untuk berat beban yang diangkat sehingga didapatkan nilai bagian A. Sementara skor dari tabel B dijumlahkan dengan skor dari tabel coupling sehingga didapatkan nilai bagian B. Dari nilai bagian A dan bagian B dapat digunakan untuk mencari nilai bagian C dari tabel C yang ada.
Nilai REBAdidapatkan dari hasil penjumlahan nilai bagian C dengannilai aktivitas pekerja. Dari nilai REBA tersebut dapat diketahui level resiko pada muscolusceletal dan tindakan yang perlu dilakukan untuk mengurangi resiko serta perbaikan kerja. Untuk lebih jelasnya, alur cara kerja dengan menggunakan metode REBA serta level resiko yang terjadi dapat dilihat pada gambar 2.13 dan tabel 2.15
Tabel 2.15 Tabel Level Resiko dan Tindakan
Dari tabel resiko di atas dapat diketahui dengan nilai REBA yang didapatkan dari asil perhitungan sebelumnya dapat diketahui level resiko yang terjadi dan perlu atau tidaknya tindakan dilakukan untuk perbaikan. Perbaikan kerja yang mungkin dilakukan antara lain berupa perancangan ulang peralatan kerja berdasarkan prinsip-prinsip ergonomi.
b. Definisi RULA (Rapid Upper Limb Assessment)
RULA atau Rapid Upper Limb Assessment dikembangkan oleh Dr.Lynn Mc Atamney dan Dr. Nigel Corlett yang merupakan ergonom dari universitas di Nottingham (University of Nottingham’s Institute of Occupational Ergonomics). Pertama kali dijelaskan dalam bentuk jurnal aplikasi ergonomi pada tahun 1993(Lueder, 1996).
Rapid Upper Limb Assesment adalah metode yang dikembangkan dalam bidang ergonomi yang menginvestigasi
melengkapi dan melakukan scoring general pada daftar aktivitas yang mengindikasikan perlu adanya pengurangan resiko yang diakibatkan penggangkatan fisik yang dilakukan operator. RULA diperuntukkan dipakai pada bidang ergonomi dengan bidang cakupan yang luas (McAtamney, 1993).
Teknologi ergonomi tersebut mengevaluasi posture (sikap), kekuatan dan aktivitas otot yang menimbulkan cidera akibat aktivitas berulang (repetitive strain injuries). Ergonomi diterapkan untuk mengevaluasi hasil pendekatan yang berupa skor resiko antara satu sampai tujuh, yang mana skor tertinggi menandakan level yang mengakibatkan resiko yang besar (berbahaya) untuk dilakukan dalam bekerja. Hal ini bukan berarti bahwa skor terendah akan menjamin pekerjaan yang diteliti bebas dari ergonomic hazards. Oleh sebab itu RULA dikembangkan untuk mendeteksi postur kerja yang beresiko dan melakukan perbaikan sesegera mungkin (Lueder, 1996).
c. Perkembangan RULA
RULA dikembangkan untuk memenuhi tujuan sebagai berikut:
1. Memberikan suatu metode pemeriksaan populasi pekerja secara cepat, terutama pemeriksaan paparan (exposure) terhadap resiko gangguan bagian tubuh atas yang disebabkan karena bekerja.
2. Menentukan penilaian gerakan-gerakan otot yang dikaitkan dengan Postur kerja, mengeluarkan tenaga, dan melakukan kerja statis dan repetitive yang mengakibatkan kelelahan otot.
3. Memberikan hasil yang dapat digunakan padap emeriksaan atau pengukuran ergonomi yang mencakup faktor-faktor fisik, epidemiologis, mental, lingkungan dan faktor organisional dan khususnya mencegah terjadi gangguan pada tubuh bagian atas akibat kerja.
RULA dikembangkan tanpa membutuhkan piranti khusus. Ini memudahkan peneliti untuk dapat dilatih dalam melakukan pemeriksaan dan pengukuran tanpa biaya peralatan tambahan. Pemeriksaan RULA dapat dilakukan di tempat yang terbatas tanpa mengganggu pekerja. Pengembangan RULA terjadi dalam tiga tahap. Tahap pertama adalah pengembangan untuk perekaman atau pencatatan postur kerja, tahap kedua adalah pengembangan system penskoran (scoring) dan ketiga adalah pengembangan skala level tindakan yang memberikan suatu panduan terhadap level resiko dan kebutuhan akan tindakan untuk melakukan pengukuran yang lebih terperinci.
Penilaian menggunakan RULA merupakan metode yang telah dilakukan oleh McAtamey dan Corlett (1993). Tahap-tahap menggunakan metode RULA adalah sebagai berikut:
Tahap 1: Pengembangan metode untuk pencatatan postur bekerja Untuk menghasilkan suatu metode yang cepat
bagian atas dapat masuk dalam pemeriksaan.
Kisaran gerakan untuk setiap bagian tubuh dibagi menjadi bagian-bagian menurut kriteria yang berasal dari interpretasi literatur yang relevan. Bagian- bagian ini diberi angka sehingga angka 1 berada pada kisaran gerakan atau postur bekerja dimana resiko faktor merupakan terkecil atau minimal. Sementara angka angka yang lebih tinggi diberikan pada bagian-bagian kisaran gerakan dengan postur yang lebih ekstrim yang menunjukkan adanya faktor resiko yang meningkat yang menghasilkan beban pada struktur bagian tubuh.
Sistem penyekoran (scoring) pada setiap postur bagian tubuh ini menghasilkan urutan angka yang logis dan mudah untuk diingat. Agar memudahkan identifikasi kisaran postur dari gambar setiap bagian tubuh disajikan dalam bidang sagital.
Pemeriksaan atau pengukuran dimulai dengan mengamati operator selama beberapa siklus kerja untuk menentukan tugas dan postur pengukuran. Pemilihan mungkin dilakukan pada postur dengan siklus kerja terlama dimana beban terbesar terjadi. Karena RULA dapat dilakukan dengan cepat, maka pengukuran dapat dilakukan pada setiap postur pada siklus kerja.
Tabel 2.16 Skor pergerakan lengan atas
Gambar 2.14 Range pergerakan lengan atas (a) postur alamiah, (b) postur extensiondan flexion,(c) postur lengan atas flexion.
Rentang untuk lengan bawah dikembangkan dari penelitian Grandjean dan Tichauer. Skor tersebut adalah:
Panduan untuk pergelangan tangan dikembangkan dari penelitian Health and Safety Executive, digunakan untuk menghasilkan skor postur Sebagai berikut:
Tabel 2.18 Skor pergerakan pergelangan tangan
Gambar 2.16 Range pergerakan pergelangan tangan (a) postur alamiah, (b) postur flexion 15⁰ +, (c)postur 0-15⁰ flexion maupun extension, (d) postur
extension
Putaran pergelangan tangan ( pronation dan supination) yang dikeluarkan olehHealth and Safety Executive pada postur netral berdasar pada Tichauer . Skor tersebut adalah:
+1 jika pergelangan tangan berada pada rentang menengah putaran
+2 jika pergelangan tangan pada atau hampir berada pada akhir rentang putaran.
Gambar 2.17 standart rula putaran pergelangan tangan (a) postur alamiah dan (b) postur putaran pergelangan tangan.
Kelompok B, rentang postur untuk leher didasarkan pada studi yang dilakukan oleh Chaffin dan Kilbom et al . Skor dan kisaran tersebut adalah:
Gambar 2.19 range pergerakan leher yang diputar atau dibengkokkan (a) postur alamiah, (b) postur leher diputar, (c) postur leher dibengkokkan.
Kisaran untuk punggung dikembangkan oleh Drury, Grandjean dan Grandjean et al .:
Tabel 2.20 skor pergerakan untuk punggung.
Gambar 2.20 Range pergerakan punggung (a) postur 20⁰-60⁰ flexion, (b) postur alamiah, (c) postur 0 - 20⁰ flexion, (d) postur 60⁰ flexionatau lebih
Punggung Diputar atau Dibengkokkan Keterangan:
+1 jika tubuh diputar
+1 jika tubuh miring ke samping
Gambar 2.21 Range pergerakan punggung yang diputar atau dibengkokkan (a) postur alamiah, (b) postur punggung diputar, (c) postur punggung dibengkokkan.
Kisaran untuk postur kaki dengan skor postur kaki ditetapkan sebagai berikut:
+1 jika kaki tertopang ketika duduk dengan bobot seimbang rata. +1 jika berdiri dimana bobot tubuh tersebar merata pada kaki, dimana terdapat ruang untuk berubah posisi.
+2 jika kaki tidak tertopang atau bobot tubuh tidak tersebar merata.
Tahap 2 : Perkembangan sistem untuk pengelompokan skor postur bagian tubuh.
Rekaman video yang dihasilkan dari postur kelompok A yang meliputi lengan atas, lengan bawah, pergelangan tangan dan putaran pergelangan tangan diamati dan ditentukan skor untuk masing -masing postur. Kemudian skor tersebut dimasukkan dalam tabel A untuk memperoleh skor A
Tabel 2.21 skor postur kelompok A
Rekaman video yang dihasilkan dari postur kelompok B yaitu leher, punggung (badan) dan kaki diamati dan ditentukan skor untuk masing-masing postur. Kemudian skor tersebut dimasukkan ke dalam tabel B untuk memperoleh skor B.
Tabel 2.22 skor postur kelompok A
Sistem penskoran dilanjutkan dengan melibatkan otot dan tenaga yang digunakan. Penggunaan yang melibatkan otot dikembangkan berdasarkan penelitian Drury , yaitu sbb: 1. Skor untuk penggunaan otot:
+1 jika postur statis (dipertahankan dalam waktu 1 menit) atau penggunaan postur tersebut berulang lebih dari 4 kali dalam 1 menit.
2. Penggunaan tenaga (beban) dikembangkan berdasarkan penelitian Putz - Anderson dan Stevenson dan Baida, yaitu sbb:
0 jika pembebanan sesekali atau tenaga kurang dari 20 Kg dan ditahan.
skor penggunaan otot dan skor tenaga pada kelompok tubuh bagian A dan B diukur dan dicatat dalam kotak-kotak yang tersedia kemudian ditambahkan dengan skor yang berasal dari tabel A dan B, yaitu sbb:
Skor A + skor penggunaan otot + skor tenaga (beban) untuk kelompok A = skor C Skor B + skor penggunaan otot + skor tenaga (beban) untuk kelompok B = skor D
+ + =
+ + =
Gambar 2.22 perhitungan RULA
Tahap 3 : Pengembangan Grand Skor dan Daftar Tindakan Setiap kombinasi skor C dan D diberikan rating yang disebut grand skor, yang nilainya 1 sampai 7. Nilai grand skor diperoleh dari tabel berikut ini:
Lengan atas Lengan bawah Pergelangan putaran Leher Punggung kaki Grand tenag tenag Otot Otot Tabel Skor Skor Tabel Group Group
Tabel 2.23 Tabel grand score
Setelah diperoleh grand score, yang bernilai 1 hingga 7 menunjukkan level tindakan (action level) sebagai berikut:
Action level 1
Suatu skor 1 atau 2 menunjukkan bahwa postur ini bias diterima jika tidak dipertahankan atau tidak berulang dalam periode yang lama.
Action level 2
Skor 3 atau 4 yang menunjukkan bahwa diperlukan pemeriksaan lanjutan dan juga diperlukan perubahan-perubahan.
Action level 3
PROSEDUR PRAKTIKUM
1. Praktikan yang terdiri dari 5 orang, 1 orang sebagai operator dan yang lain sebagai pengukur dan pencatat data. Untuk mendapatkan data yang akan diperlukan dalam perhitungan maka yang akan diukur (data awal):
1. Berat beban.
2. Berat tubuh operator 3. Panjang anggota badan
a. Telapak tangan
b. Panjang lengan bawah c. Panjang lengan atas d. Panjang punggung
4. Sudut link pada joint anggota tubuh. a. Lengan bawah dengan telapak tangan b. Lengan bawah dengan lengan atas c. Lengan atas dengan punggung d. Punggung dengan pangkal paha
Semua data ditulis pada lembar pengamatan yang telah tersedia.
2. Setelah data awal diperoleh maka praktikan yang sebagai operator akan engangkat benda dengan posisi pengangkatan benda:
a. Usulan dari praktikan b. Ditentukan oleh asisten
3. Sudut-sudut yang akan kita tentukan adalah sudut yang terbentuk dari join- join pada tubuh:
a. Pada posisi ini operator akan diukur sudut yang membentuk join- join yang akan kita amati.
b. Sudut yang membentuk lenganbawah dengan telapak tangan menyesuaikan
c. Sudut yang membentuk lengan bawah dengan lengan atas menyesuaikan.
d. Sudut yang membentuk lengan atas dengan punggung menyesuaikan.
e. Sudut yang membentuk punggung dengan pangkal paha menyesuaikan. Untuk lebih jelasnya lihat gambar dibawah ini: