LAMPIRAN A : MENTERJEMAHKAN SETIAP LANGKAH DEMI
LANGKAH KE BAHASA MATHEMATICA 9
Persaman gerak untuk
θ
1adalah
(𝑚
1+ 𝑚
2+ 𝑚
3)𝑙
1𝜃̈
1+ (𝑚
2+ 𝑚
3)𝑙
2𝑐𝑜𝑠(𝜃
1− 𝜃
2)𝜃̈
2+ 𝑚
3𝑙
3𝑐𝑜𝑠(𝜃
1−
𝜃
3)𝜃̈
3+ (𝑚
2+ 𝑚
3)𝑙
2𝜃̇
22𝑠𝑖𝑛(𝜃
1− 𝜃
2) + 𝑚
3𝑙
3𝜃̇
32𝑠𝑖𝑛(𝜃
1− 𝜃
3) + (𝑚
1+ 𝑚
2+
𝑚
3)𝑔 𝑠𝑖𝑛𝜃
1= 0
(2.19)
Diubah dalam program menjadi
g (m1+m2+m3) Sin[θ1[t]]+θ2’[t]^2 l2 (m2+m3) Sin[θ1[t]
-θ2[t]]+θ3’[t]^2 l3 m3 Sin[θ1[t]-θ3[t]]+l1 m1 θ1’’[t]+(m2+m3)
Penyelesaian persamaan differensial
triple
pendulum:
sol=NDSolve[eqns, (θ1,θ2}, {t,0,p}, Maxsteps->Infinity, PrecisionGoal->4];pq=sol[[1,1,2,1,1,2]];
Posisi Persamaan pendulum :
pos2[t_]:={(l1 Sin[θ1[t]]+l2 Sin[θ2[t]]),(-l1 Cos[θ1[t]]-l2
Cos[θ2[t]])};
pos3[t_]:={(l1 Sin[θ1[t]]+l2 Sin[θ2[t]]+l3 Sin[θ3[t]]),(-l1
Cos[θ1[t]]-l2 Cos[θ2[t]]-l3 Cos[θ3[t]])};
Jejak persamaan Gerak Pendulum dalam simulasi:
path=ParametricPlot[Evaluate[pos3[t]/.sol[[1]],{t,p-Batasan dalam visualiasi Pendulum :
Tombol Pemilihan Grafik hasil animasi Pendulum :
Switch[plottype,
(*Tampilan plot simpangan x m1 dan m2 terhadap t*)
x1x2, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Green, Blue}, Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan y m1 dan m2 terhadap t*)
y1y2, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Green, Blue}, Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan x m2 dan m3 terhadap t*)
x2x3, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Blue, Red},
Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan y m2 dan m3 terhadap t*)
y2y3, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Blue, Red},
Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan θ m1 dan m2 terhadap t*)
θ1θ2, Plot[{g1[t], g2[t]}, {t,0,p},
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150}, AspectRatio->32/100.],
(*Tampilan plot simpangan θ m2 dan m3 terhadap t*)
θ2θ3, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Blue, Red},
Axes->False,PlotLabel->Style{“θ(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan Plot x1 vs y1*)
x1y1,
ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion-
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[x,1],” vs “,
Subscript[y,1]}],PlotRange->{{-3Pi/4,3Pi/4}, Automatic},
ImageSize->{420,150},PlotStyle->Darker[Green,.1],AspectRatio->32/100.],
(*Tampilan Plot x2 vs y2*)
x2y2,
ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion-
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[x,2],” vs “, Subscript[y,2]}],PlotRange
->{{-3Pi/2,3Pi/2}, Automatic},
ImageSize->{420,150},PlotStyle->Darker[Blue,.1],AspectRatio->32/100.],
(*Tampilan Plot x3 vs y3*)
x3y3,
ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion-
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[x,3],” vs “, Subscript[y,3]}],PlotRange
->{{-3Pi/2,3Pi/2}, Automatic},
ImageSize->{420,150},PlotStyle->Darker[Blue,.1],AspectRatio->32/100.],
(*Tampilan Plot θ1 vs θ2*)
θθ, ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion -
->{{-Pi,Pi}, Automatic}, ImageSize->{420,150},ColorFunction->(Blend[{Blue, Green}, #1]&),AspectRatio->32/100.],
(*Tampilan Plot θ2 vs θ3*)
θϕ, ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion -
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[θ,2],” vs “, Subscript[θ,3]}],PlotRange
->{{-Pi,Pi}, Automatic},
ImageSize->{420,150},ColorFunction->(Blend[{Red, Blue}, #1]&),AspectRatio->32/100.],
(*Tampilan plot ω1 vs θ1*)
θθPrime1, ParametricPlot[{g1[t], g2[t]}, {t,0,p}, MaxRecursion
->ControlActive[3,4],
Axes->False,PlotLabel->Row[{Subscript[OverDot[θ],1],” vs “,Subscript[θ,1]}],Plot Range->{{-Pi,Pi}, Automatic},ImageSize{420,150},AspectRatio->32/100., PlotStyle->Darker[Green,.2]],
(*Tampilan plot ω2 vs θ2*)
θθPrime2, ParametricPlot[{g1[t], g2[t]}, {t,0,p}, MaxRecursion
->ControlActive[3,4],
Axes->False,PlotLabel->Row[{Subscript[OverDot[θ],2],” vs “,Subscript[θ,2]}],PlotRange ->{{-Pi,Pi}, Automatic},ImageSize{420,150},AspectRatio->32/100., PlotStyle->Darker[Blue,.2]],
(*Tampilan plot ω3 vs θ3*)
θθPrime2, ParametricPlot[{g1[t], g2[t]}, {t,0,p}, MaxRecursion
->ControlActive[3,4],
Style[“***********************************************”, Bold,16, Darker[Black, .1], “Label”],
Style[“PENDULUM NONLINIER”, Bold, 18, Darker[Black, .1], “Label”],
Style[“******************************************”, Bold, 12, Darker[Black, .1], “Label”],
Style[“ “, Bold, 12, Darker[Green,.8], “Label”],
Style[“Parameter Pendulum”,”Subsection”, Bold, 12,
Darker[Black,.1], “Label”],
Tampilan Parameter massa pendulum hijau, biru, merah, panjang pendulum hijau,
biru, merah, gravitasi, sudut pendulum hijau, biru, merah, kecepatan sudut pendulum
hijau, biru, merah, dan waktu (Berurutan):
{{m1, 1, “Green mass (m1)”},1,5,ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{m2,1,”Blue mass (m2)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{m3,1,”Red mass (m3)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{l1,1,”Green length (l1)”},1,5,ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{l2,1,”Blue length (l2)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{l3,1,”Red length (l3)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{g,1,”Gravity (g)”},1,9.8, ImageSize->Tiny, ContinuousAction->False, Appearance->”Labeled”},
Delimiter,
Style[“Kondisi Awal”, “Subsection”, Bold, 12,
Darker[Black,.1],”Label”],
{{init1,Pi/2,”green angle(θ1)
“},-Pi/2, Pi/2, Appearance->”Labeled”, ImageSize->Tiny},
{{init2,0,”blue angle(θ2)
{{init3,0,”red angle(θ3)
“},-Pi/2, Pi/2, Appearance->”Labeled”, ImageSize->Tiny},
{{initprime1,0,”green velocity(ω1)”},0,5,ImageSize
->Tiny,Appearance->”Labeled”},
{{initprime2,0,”blue velocity(ω2)”},0,
5,ImageSize->Tiny,Appearance->”Labeled”},
{{initprime3,0,”red velocity(ω3)”},0,5,ImageSize
->Tiny,Appearance->”Labeled”},
m3”, y2y3->” Simpangan y m2 dan m3”,θ1θ2->”Sensitivitas Kondisi
Awal θ1 dan θ2”, θ2θ3->”Sensitivitas Kondisi Awal θ2 dan
θ3”,x1y1->”x1 vs. y1”, x2y2->”x2 vs. y2”, x3y3->”x3 vs. y3”,θθ->”θ1
vs. θ2”, θϕ->”θ2 vs. θ3”, θθprime1->” 𝜃̇1 vs θ1”, θθprime2->” 𝜃̇2 vs
θ2”, θθprime3->” 𝜃̇3 vs θ3”} ”},ControlType->PopupMenu}
Tombol untuk menganimasikan pendulum terhadap waktu:
{{p,0.001,”Animasi”},0.001,100,1.0, ControlType->Trigger},
AutorunSequencing->All,TrackedSymbols:->Manipulate,Initialization:->Get[“Barcharts”],
LAMPIRAN B: LISTING PROGRAM SIMULASI GERAK TRIPLE
PENDULUM NONLINIER
Berikut ini merupakan listing program untukanimasi dan visualisasi gerakan triple pendulum nonlinier
(*Penentuan Variabel-variabel dan konstanta-konstanta*)
sol=NDSolve[eqns, (θ1,θ2}, {t,0,p}, Maxsteps->Infinity, PrecisionGoal->4];pq=sol[[1,1,2,1,1,2]];
pos1[t_]:={l1 Sin[θ1[t]],-l1 Cos[θ1[t]]};
pos2[t_]:={(l1 Sin[θ1[t]]+l2 Sin[θ2[t]]),(-l1 Cos[θ1[t]]-l2
Cos[θ2[t]])};
pos3[t_]:={(l1 Sin[θ1[t]]+l2 Sin[θ2[t]]+l3 Sin[θ3[t]]),(-l1
Cos[θ1[t]]-l2 Cos[θ2[t]]-l3 Cos[θ3[t]])};
path=ParametricPlot[Evaluate[pos3[t]/.sol[[1]],{t,p-
path1=ParametricPlot[Evaluate[pos2[t]/.sol[[1]],{t,p-p/5,p},
Darker[Green,.2],Line[{{0, 0}, First@Evaluate[pos1[pq]/.sol]}], Disk[First@Evaluate[pos1[pq]/.sol,.2],ImageSize->{320, Sin[θ2[t]],y1y2,(-l1 Cos[θ1[t]]-l2 Cos[θ2[t]]),x2x3,(l1
Sin[θ1[t]+l2 Sin[θ2[t]]+l3 Sin[θ3[t]]),y2y3,(-l1 Cos[θ1[t]-l2 Cos[t]]-l3
Cos[t]]),x1y1,pos1[t][[2]],x2y2,pos2[t][[2]],pos3[t][[2]],θ1θ2, θ2[t],θ2θ3,θ3[t],θθ,θ2[t],θϕ,θ3[t],θθprime1,θ1’[t],θθprime2, θ2’[t],θθprime3,θ3’[t],_,1]/.sol[[1]];
Switch[plottype,
(*Tampilan plot simpangan x m1 dan m2 terhadap t*)
x1x2, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Green, Blue}, Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”],
PlotRange->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
(*Tampilan plot simpangan y m1 dan m2 terhadap t*)
y1y2, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Green, Blue}, Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan x m2 dan m3 terhadap t*)
x2x3, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Blue, Red},
Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan y m2 dan m3 terhadap t*)
y2y3, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Blue, Red},
Axes->False,PlotLabel->Style{“x(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan θ m1 dan m2 terhadap t*)
θ1θ2, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Green, Blue}, Axes->False,PlotLabel->Style{“θ(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
AspectRatio->32/100.],
(*Tampilan plot simpangan θ m2 dan m3 terhadap t*)
θ2θ3, Plot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3, 4], PlotStyle->{Blue, Red},
Axes->False,PlotLabel->Style{“θ(t)vs t”, “Label”], PlotRange
->{{pq-25,pq}, Automatic}, ImageSize->{420, 150},
(*Tampilan Plot x1 vs y1*)
x1y1,
ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion-
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[x,1],” vs “, Subscript[y,1]}],PlotRange
->{{-3Pi/4,3Pi/4}, Automatic},
ImageSize->{420,150},PlotStyle->Darker[Green,.1],AspectRatio->32/100.],
(*Tampilan Plot x2 vs y2*)
x2y2,
ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion-
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[x,2],” vs “, Subscript[y,2]}],PlotRange
->{{-3Pi/2,3Pi/2}, Automatic},
ImageSize->{420,150},PlotStyle->Darker[Blue,.1],AspectRatio->32/100.],
(*Tampilan Plot x3 vs y3*)
x3y3,
ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion-
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[x,3],” vs “, Subscript[y,3]}],PlotRange
->{{-3Pi/2,3Pi/2}, Automatic},
ImageSize->{420,150},PlotStyle->Darker[Blue,.1],AspectRatio->32/100.],
(*Tampilan Plot θ1 vs θ2*)
θθ, ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion -
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[θ,1],” vs “, Subscript[θ,2]}],PlotRange
->{{-Pi,Pi}, Automatic},
ImageSize->{420,150},ColorFunction->(Blend[{Blue, Green}, #1]&),AspectRatio->32/100.],
(*Tampilan Plot θ2 vs θ3*)
θϕ, ParametricPlot[{g1[t],g2[t]},{t,0,p},MaxRecursion -
>ControlActive[3,4],Axes->False,PlotLabel->Rown[{Subscript[θ,2],” vs “, Subscript[θ,3]
}],PlotRange->{{-Pi,Pi}, Automatic},
(*Tampilan plot ω1 vs θ1*)
θθPrime1, ParametricPlot[{g1[t], g2[t]}, {t,0,p}, MaxRecursion
->ControlActive[3,4],
Axes->False,PlotLabel->Row[{Subscript[OverDot[θ],1],” vs “,Subscript[θ ,1]}],PlotRange->{{-Pi,Pi}, Automatic},ImageSize{420,150},AspectRatio->32/100., PlotStyle->Darker[Green,.2]],
(*Tampilan plot ω2 vs θ2*)
θθPrime2, ParametricPlot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3,4],
Axes->False,PlotLabel->Row[{Subscript[OverDot[θ],2],” vs “,Subscript[θ,2]}],PlotRange ->{{-Pi,Pi}, Automatic},ImageSize{420,150},AspectRatio->32/100., PlotStyle->Darker[Blue,.2]],
(*Tampilan plot ω3 vs θ3*)
θθPrime2, ParametricPlot[{g1[t], g2[t]}, {t,0,p},
MaxRecursion->ControlActive[3,4],
Axes->False,PlotLabel-Style[“ANIMASI GERAK TRIPLE”, Bold, 18, Darker[Black,.1], “Label”],
Style[“***********************************************”,
Bold,16, Darker[Black, .1], “Label”],
Style[“PENDULUM NONLINIER”, Bold, 18, Darker[Black, .1], “Label”],
Style[“******************************************”, Bold, 12, Darker[Black, .1], “Label”],
Style[“ “, Bold, 12, Darker[Green,.8], “Label”],
Style[“Parameter Pendulum”,”Subsection”, Bold, 12,
{{m1, 1, “Green mass (m1)”},1,5,ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{m2,1,”Blue mass (m2)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{m3,1,”Red mass (m3)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{l1,1,”Green length (l1)”},1,5,ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{l2,1,”Blue length (l2)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{l3,1,”Red length (l3)”},1,5, ImageSize->Tiny,
ContinuousAction->False, Appearance->”Labeled”},
{{g,1,”Gravity (g)”},1,9.8, ImageSize->Tiny, ContinuousAction->False, Appearance->”Labeled”},
Delimiter,
Style[“Kondisi Awal”, “Subsection”, Bold, 12,
Darker[Black,.1],”Label”],
{{init1,Pi/2,”green angle(θ1)
“},-Pi/2, Pi/2, Appearance->”Labeled”, ImageSize->Tiny},
{{init2,0,”blue angle(θ2)
“},-Pi/2, Pi/2, Appearance->”Labeled”, ImageSize->Tiny},
{{init3,0,”red angle(θ3)
“},-Pi/2, Pi/2, Appearance->”Labeled”, ImageSize->Tiny},
{{initprime1,0,”green velocity(ω1)”},0,5,ImageSize
->Tiny,Appearance->”Labeled”},
{{initprime2,0,”blue velocity(ω2)”},0,5,ImageSize
->Tiny,Appearance->”Labeled”},
{{initprime3,0,”red velocity(ω3)”},0,5,ImageSize
m3”, y2y3->” Simpangan y m2 dan m3”,θ1θ2->”Sensitivitas Kondisi
Awal θ1 dan θ2”, θ2θ3->”Sensitivitas Kondisi Awal θ2 dan
θ3”,x1y1->”x1 vs. y1”, x2y2->”x2 vs. y2”, x3y3->”x3 vs. y3”,θθ->”θ1
vs. θ2”, θϕ->”θ2 vs. θ3”, θθprime1->” 𝜃̇1 vs θ1”, θθprime2->” 𝜃̇2 vs
θ2”, θθprime3->” 𝜃̇3 vs θ3”},
ControlType->PopupMenu},{{p,0.001,”Animasi”},0.001,100,1.0, ControlType->Trigger}, AutorunSequencing->All,TrackedSymbols:->Manipulate,Initialization:->Get[“Barcharts”],
LAMPIRAN C: PENJABARAN PERSAMAAN GERAK SISTEM TRIPLE
PENDULUM NONLINIER
Koordinat
–
koordinat posisi tiap pendulum :
x
1= l
1+ l
2+ l
3–
l
1cos θ
1(2.2)
Kemudian, setiap koordinat diatas akan diturunkan terhadap waktu untuk
memperoleh kecepatan. Hasil dari turunan menghasilkan
𝑥̇
1= −𝑙
1𝜃̇
1sin 𝜃
1trigonometri untuk selisih dua sudut diperoleh energi kinetik :
T =
1Energi potensial diperoleh dengan mensubsitusikan persamaan 2.2, 2.4, 2.6 ke
persamaan 2.9 :
V =
m
1gx
1+ m
2gx
2+ m
3gx
3=
m
1g (l
1+ l
2+ l
3–
l
1cos θ1
) + m
2g (l
1+ l
2+ l
3–
l
1 cos θ1–
l
2cos θ2) + m
3g (l
1+ l
2Sehingga Fungsi Lagrangian
Triple
Pendulum Nonlinier:
Persamaan diatas adalah Fungsi Lagrangian dari
triple
pendulum, persamaan diatas
akan diselesaikan dengan persamaan Lagrange agar diperoleh posisi masing-masing
pendulum.
Persamaan Lagrange dirumuskan sebagai berikut:
𝑑
𝑚
1𝑙
12𝜃̈
1+ 𝑚
2𝑙
12𝜃̈
1+ 𝑚
3𝑙
12𝜃̈
1+ 𝑚
2𝑙
1𝑙
2𝜃̈
2𝑐𝑜𝑠(𝜃
1− 𝜃
2)
Untuk lebih sederhananya maka persamaan diatas dibagi
l
1diperoleh hasil:
(𝑚
1+ 𝑚
2+ 𝑚
3)𝑙
1𝜃̈
1+ (𝑚
2+ 𝑚
3)𝑙
2𝑐𝑜𝑠(𝜃
1− 𝜃
2)𝜃̈
2+ 𝑚
3𝑙
3𝑐𝑜𝑠(𝜃
1− 𝜃
3)𝜃̈
3+
(𝑚
2+ 𝑚
3)𝑙
2𝜃̇
22𝑠𝑖𝑛(𝜃
1− 𝜃
2) + 𝑚
3𝑙
3𝜃̇
32𝑠𝑖𝑛(𝜃
1− 𝜃
3) + (𝑚
1+ 𝑚
2+ 𝑚
3)𝑔 𝑠𝑖𝑛𝜃
1=
0
(2.19)
Untuk lebih sederhananya maka persamaan diatas dibagi
l
2diperoleh hasil:
(𝑚
2+ 𝑚
3) 𝑙
1𝑐𝑜𝑠(𝜃
1− 𝜃
2) 𝜃̈
1+ (𝑚
2+ 𝑚
3)𝑙
2𝜃̈
2+ 𝑚
3𝑙
3𝑐𝑜𝑠(𝜃
2− 𝜃
3)𝜃̈
3−
(𝑚
2+ 𝑚
3)𝑙
1𝜃̇
12𝑠𝑖𝑛(𝜃
1− 𝜃
2) + 𝑚
3𝑙
3𝜃̇
32𝑠𝑖𝑛(𝜃
2− 𝜃
3) + (𝑚
2+ 𝑚
3)𝑔 𝑠𝑖𝑛𝜃
2= 0
(2.20)
Persamaan gerak untuk pendulum ketiga:
𝜕𝐿
Untuk lebih sederhananya maka persamaan diatas dibagi
l
3diperoleh hasil:
𝑚
3𝑙
1𝑐𝑜𝑠(𝜃
1− 𝜃
3)𝜃̈
1+ 𝑚
3𝑙
2𝑐𝑜𝑠(𝜃
2− 𝜃
3) 𝜃̈
2+ 𝑚
3𝑙
3𝜃̈
3− 𝑚
3𝑙
1𝜃̇
12𝑠𝑖𝑛(𝜃
1−
LAMPIRAN D: GRAFIK RUANG FASA UNTUK PERBANDINGAN SISTEM
DENGAN VARIASI NILAI BEBERAPA PARAMETER
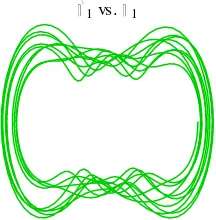
Grafik diagram fasa untuk Tabel 4.1 (Hasil pengujian keadaan sistem untuk variasi
sudut simpangan awal, m
1= m
2= m
3= 1 dan l
1= l
2= l
3= 1)
Gambar C.1, Ruang fasa dengan θ
1= 1.15-
1.57, θ
2= 1.31, dan θ
3= 1.17
Gambar C.2
, Ruang fasa dengan θ
1= 0.85-1.14
, θ
2= 1.31,
dan θ
3= 1.17
Gambar C.3
, Ruang fasa dengan θ
1= 0-0.85
, θ
2= 1.31, dan θ
3= 1.17
Gambar C.4
, Ruang fasa dengan θ
1= 1.0-1.14
, θ
2= 1.2
, dan θ
3= 1.65
1vs. 11vs. 1
1vs. 1
Gambar C.5
, Ruang fasa dengan θ
1= 0.9-0.99
, θ
2= 1.2
, dan θ
3= 1.65
Gambar C.6, Ruang fasa
dengan θ
1= 0-0.89
, θ
2= 1.2
, dan θ
3= 1.65
Gambar C.7
, Ruang fasa dengan θ
1= 0-0.89
, θ
2= 1.05
, dan θ
3= 1.05
Gambar C.8
, Ruang fasa dengan θ
1= 0.7-0.79
, θ
2= 1.05
, dan θ
3= 1.05
1vs. 11vs. 1
1vs. 1
Gambar C.9
, Ruang fasa dengan θ
1= 0-0.69
, θ
2= 1.05
, dan θ
3= 1.05
Gambar C.10
, Ruang fasa dengan θ
1= 0.62-0.69
, θ
2= 0.86
, dan θ
3= 0.95
Gambar C.11
, Ruang fasa dengan θ
1= 0.5-0.61
, θ
2= 0.86
, dan θ
3= 0.95
Gambar C.12
, Ruang fasa dengan θ
1= 0-0.49
, θ
2= 0.86
, dan θ
3= 0.95
1vs. 11vs. 1
1vs. 1
Gambar C.13
, Ruang fasa dengan θ
1= 0.4-0.49
, θ
2= 0.48
, dan θ
3= 0.7
Gambar C.14
, Ruang fasa dengan θ
1= 0.28-0.39
, θ
2= 0.48
, dan θ
3= 0.7
Gambar C.15
, Ruang fasa dengan θ
1= 0-0.27
, θ
2= 0.48
, dan θ
3= 0.7
Grafik diagram fasa untuk Tabel 4.2 (Hasil pengujian keadaan sistem untuk variasi
panjang tali pendulum1, m
1= m
2= m
3= 1, l
2= l
3= 1, dan
θ
1= Pi/2)
Gambar C.16, Ruang fasa dengan l
1= 1-1.5
, θ
2= 1.31
, dan θ
3= 1.17
1vs. 11vs. 1
1vs. 1
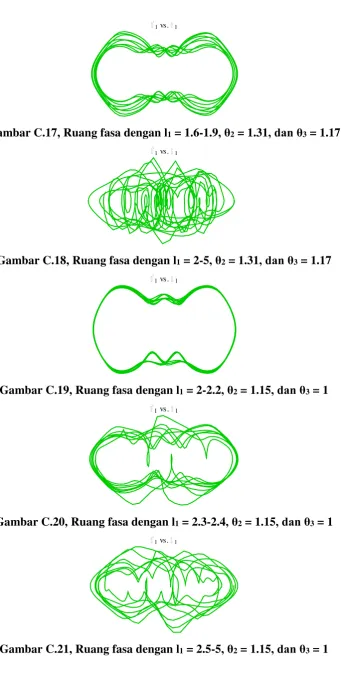
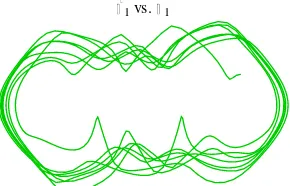
Gambar C.17, Ruang fasa dengan l
1= 1.6-1.9
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.18, Ruang fasa dengan l
1= 2-5
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.19, Ruang fasa dengan l
1= 2-2.2
, θ
2= 1.15
, dan θ
3= 1
Gambar C.20, Ruang fasa dengan l
1= 2.3-2.4
, θ
2= 1.15
, dan θ
3= 1
Gambar C.21, Ruang fasa dengan l
1= 2.5-5
, θ
2= 1.15
, dan θ
3= 1
1vs. 11vs. 1
1vs. 1
1vs. 1
Gambar C.22, Ruang fasa dengan l
1= 2.5-3
, θ
2= 0.98
, dan θ
3= 0.98
Gambar C.23, Ruang fasa dengan l
1= 3.1-5,
θ
2= 0.98
, dan θ
3= 0.98
Grafik diagram fasa untuk Tabel 4.3 (Hasil pengujian keadaan sistem untuk variasi
panjang tali pendulum2, m
1= m
2= m
3=1, l
1= l
3= 1, dan
θ
1= Pi/2)
Gambar C.24, Ruang fasa dengan l
2= 2,
θ
2= 0-1.57
, dan θ
3= 0-1.57
Grafik diagram fasa untuk Tabel 4.4 (Hasil pengujian keadaan sistem untuk variasi
panjang tali pendulum3, m
1= m
2= m
3=1, l
1= l
2= 1, dan
θ
1= Pi/2)
Gambar C.25, Ruang fasa dengan l
3= 1.1-1.2,
θ
2= 1.31
, dan θ
3= 1.17
1vs. 11vs. 1
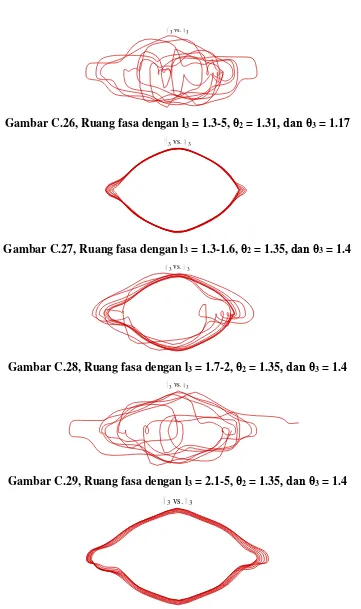
Gambar C.26, Ruang fasa dengan l
3= 1.3-5,
θ
2= 1.31
, dan θ
3= 1.17
Gambar C.27, Ruang fasa dengan l
3= 1.3-1.6,
θ
2= 1.35
, dan θ
3= 1.4
Gambar C.28, Ruang fasa dengan l
3= 1.7-2,
θ
2= 1.35
, dan θ
3= 1.4
Gambar C.29, Ruang fasa dengan l
3= 2.1-5,
θ
2= 1.35
, dan θ
3= 1.4
Gambar C.30, Ruang fasa dengan l
3= 2.1-2.8,
θ
2= 1.15
, dan θ
3= 1.57
3vs. 33vs. 3
3vs. 3
3vs. 3
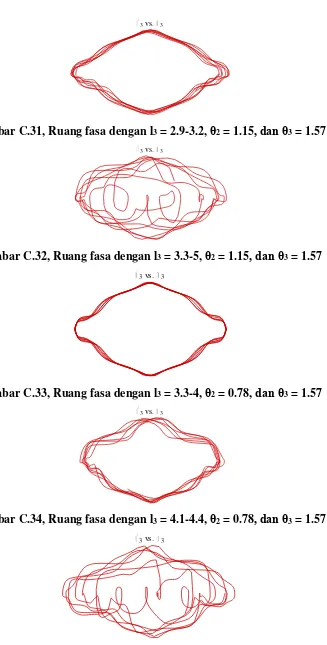
Gambar C.31, Ruang fasa dengan l
3= 2.9-3.2,
θ
2= 1.15
, dan θ
3= 1.57
Gambar C.32, Ruang fasa dengan l
3= 3.3-5,
θ
2= 1.15
, dan θ
3= 1.57
Gambar C.33, Ruang fasa dengan l
3= 3.3-4,
θ
2= 0.78,
dan θ
3= 1.57
Gambar C.34, Ruang fasa dengan l
3= 4.1-4.4,
θ
2= 0.78
, dan θ
3= 1.57
Gambar C.35, Ruang fasa dengan l
3= 4.5-5,
θ
2= 0.78
, dan θ
3= 1.57
3vs. 33vs. 3
3vs. 3
3vs. 3
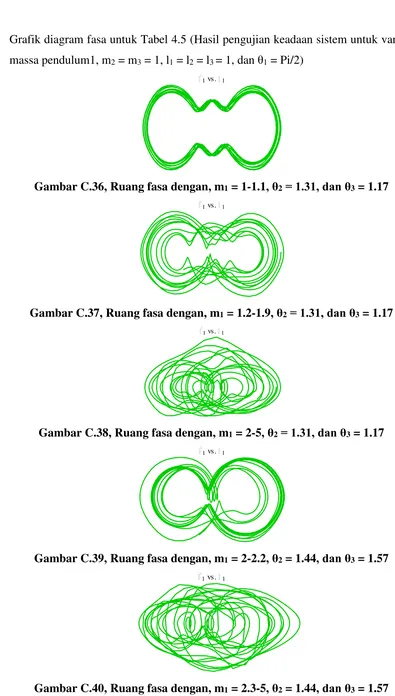
Grafik diagram fasa untuk Tabel 4.5 (Hasil pengujian keadaan sistem untuk variasi
massa pendulum1, m
2= m
3= 1, l
1= l
2= l
3= 1, dan
θ
1= Pi/2)
Gambar C.36, Ruang fasa dengan, m
1= 1-1.1
, θ
2= 1.31, dan θ
3= 1.17
Gambar C.37, Ruang fasa dengan, m
1= 1.2-1.9
, θ
2= 1.31, dan θ
3= 1.17
Gambar C.38, Ruang fasa dengan, m
1= 2-5
, θ
2= 1.31, dan θ
3= 1.17
Gambar C.39, Ruang fasa dengan, m
1= 2-2.2
, θ
2= 1.44
, dan θ
3= 1.57
Gambar C.40, Ruang fasa dengan, m
1= 2.3-5
, θ
2= 1.44
, dan θ
3= 1.57
1vs. 11vs. 1
1vs. 1
1vs. 1
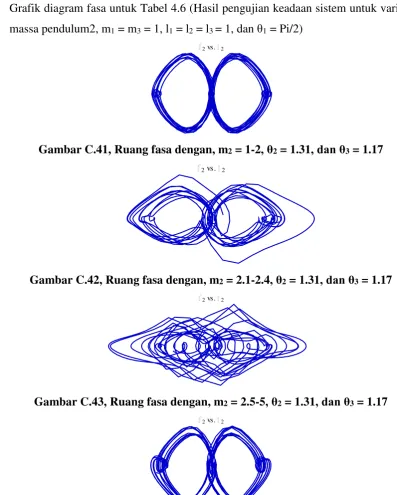
Grafik diagram fasa untuk Tabel 4.6 (Hasil pengujian keadaan sistem untuk variasi
massa pendulum2, m
1= m
3= 1, l
1= l
2= l
3= 1, dan
θ
1= Pi/2)
Gambar C.41, Ruang fasa dengan, m
2= 1-2
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.42, Ruang fasa dengan, m
2= 2.1-2.4
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.43, Ruang fasa dengan, m
2= 2.5-5
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.44, Ruang fasa dengan, m
2= 3
, θ
2= 1.17
, dan θ
3= 1
Gambar C.45, Ruang fasa dengan, m
2= 3.1-5
, θ
2= 1.17
, dan θ
3= 1
2vs. 22vs. 2
2vs. 2
2vs. 2
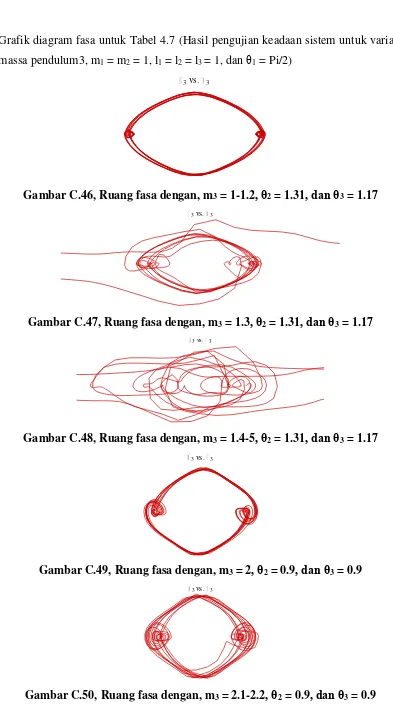
Grafik diagram fasa untuk Tabel 4.7 (Hasil pengujian keadaan sistem untuk variasi
massa pendulum3, m
1= m
2= 1, l
1= l
2= l
3= 1, dan
θ
1= Pi/2)
Gambar C.46, Ruang fasa dengan, m
3= 1-1.2
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.47, Ruang fasa dengan, m
3= 1.3
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.48, Ruang fasa dengan, m
3= 1.4-5
, θ
2= 1.31
, dan θ
3= 1.17
Gambar C.49, Ruang fasa dengan, m
3= 2
, θ
2= 0.9
, dan θ
3= 0.9
Gambar C.50, Ruang fasa dengan, m
3= 2.1-2.2
, θ
2= 0.9
, dan θ
3= 0.9
3vs. 33vs. 3
3vs. 3
3vs. 3
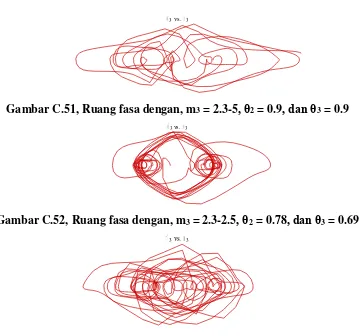
Gambar C.51, Ruang fasa dengan, m
3= 2.3-5
, θ
2= 0.9
, dan θ
3= 0.9
Gambar C.52, Ruang fasa dengan, m
3= 2.3-2.5
, θ
2= 0.78
, dan θ
3= 0.69
Gambar C.53, Ruang fasa dengan, m
3= 2.6-5
, θ
2= 0.78
, dan θ
3= 0.69
Grafik diagram fasa untuk Tabel 4.8 (Hasil pengujian sistem untuk massa dan tali
yang sama)
Gambar C.54, Ruang fasa dengan m
1= m
2= m
3= 2, l
1= l
2= l
3= 1, θ
1=
1.15-1.57, θ
2= 1.31, dan
θ
3= 1.17
Gambar C.55, Ruang fasa dengan m
1= m
2= m
3= 3, l
1= l
2= l
3= 1, θ
1=
1.15-1.57, θ
2= 1.31, dan θ
3= 1.17
3vs. 3
3vs. 3
3vs. 3
1vs. 1
Gambar C.56, Ruang fasa dengan m
1= m
2= m
3= 1, l
1= l
2= l
3= 2
, θ
1=
1.15-1.57, θ
2= 1.31, dan θ
3= 1.17
Gambar C.57, Ruang fasa dengan m
1= m
2= m
3= 1, l
1= l
2= l
3= 3
, θ
1=
1.15-1.57, θ
2= 1.31, dan θ
3= 1.17
Gambar C.58, Ruang fasa dengan m
1= m
2= m
3= l
1= l
2= l
3= 2
, θ
1= 1.15-1.57,
θ
2= 1.31, dan θ
3= 1.17
1vs. 1
1vs. 1