1
BAB I
PENDAHULUAN
I.1. Latar belakang
Candi Prambanan adalah candi Hindu terbesar di Indonesia. Lokasi Candi Prambanan terletak di Kecamatan Prambanan, sekitar 20 km dari pusat kota Yogyakarta. Secara geografis, candi ini terletak pada koordinat 7°45′8″LS dan 110°29′30″BT. Selain sebagai UNESCO’s World Heritage Sites sebagai situs warisan dunia , Candi Prambanan memiliki kawasan penunjang wisata yaitu taman wisata Candi Prambanan. Kawasan taman wisata Candi Prambanan merupakan kawasan rekreasi yang ramai dikunjungi oleh turis, baik turis domestik maupun turis asing. Di Candi Prambanan terdapat dua zona yaitu zona 1 dan zona 2. Berdasarkan Keputusan Presiden Republik Indonesia Nomor 1 Tahun 1992 Tentang Pengelolaan Taman Wisata Candi Borobudur Dan Taman Wisata Candi Prambanan Serta Pengendalian Lingkungan Kawasannya BAB II Pasal 4 ayat 2, zona 1 merupakan lingkungan kepurbakalaan yang diperuntukkan bagi perlindungan dan pemeliharaan kelestarian lingkungan fisik candi yang meliputi kawasan Candi Prambanan dikelola oleh Dinas Kepurbakalaan Candi Prambanan , Kementrian Pendidikan dan Kebudayaan. Berdasarkan pasal 5 ayat 1, zona 2 merupakan kawasan di sekeliling zona 1 masing-masing candi dan diperuntukkan bagi pembangunan taman wisata sebagai tempat kegiatan kepariwisataan, penelitian, kebudayaan, dan pelestarian lingkungan candi dikelola oleh PT. Taman Wisata Candi Borobudur , Prambanan dan Ratu Boko. Kegiatan aplikatif ini dilaksanakan pada zona 2 Candi Prambanan.
Sebagai kawasan wisata, taman wisata Candi Prambanan memerlukan sistem distribusi air bersih yang efesien untuk menjangkau semua fasilitas yang memerlukan kebutuhan air bersih. Untuk memenuhi kebutuhan air bersih di kawasan taman wisata Candi Prambanan maka tidak akan terlepas dari proses penyediaan/produksi air bersih, transmisi air bersih, distribusi air bersih dan penyimpanan air. Penyediaan air bersih adalah kegiatan yang sangat krusial untuk mendukung peningkatan pelayanan bagi wisatawan seperti toilet, mushola, westafel
dan lain-lain. Untuk melakukan kegiatan penyediaan air bersih PT. Taman Wisata Candi Prambanan sudah memiliki sistem distribusi air menggunakan pipa dengan berbagai ukuran. Menurut pengelola taman wisata Candi Prambanan, jalur induk pipa air menggunakan pipa ukuran 6 inch berjenis pipa baja, sedangkan untuk jalur pipa sekunder yang menghubungkan jalur pipa utama ke lokasi penggunaan air bersih seperti toilet , westafel , mushola, dan penyiram rumput menggunakan pipa PVC dengan ukuran yang lebih kecil yaitu 2 inch. Jaringan pipa di kawasan taman wisata Candi Prambanan tertanam di bawah tanah. Jaringan pipa yang menjadi fokus pada kegiatan aplikatif ini adalah jalur induk pipa air yang berukuran 6 inch.
Seiring berjalannya pembangunan dan peremajaan pada kawasan taman wisata Candi Prambanan maka diperlukan informasi spasial yang akurat untuk menginvetarisasi lokasi dan kedalaman dari jalur induk pipa air bawah tanah untuk memudahkan dan membantu kegiatan engineering pada peremajaan dan perawatan jalur induk pipa air bawah tanah sehingga perlu dilakukan pemetaan jalur induk pipa air bawah tanah serta visualisasinya. Pada kegiatan aplikatif ini data yang digunakan meliputi data pengukuran fitur-fitur topografi berbasis pengukuran terestris menggunakan total station dan data pengukuran jalur induk pipa air yang terletak di bawah tanah dengan data pengukuran kedalaman pipa air bawah tanah menggunakan metode pengukuran Ground Penetrating Radar (GPR).
Visualisasi jalur induk pipa air bawah tanah menjadi salah satu pekerjaan yang penting agar pengguna dapat menginterpretasi informasi spasial pipa dengan mudah. Visualisasi jalur induk pipa air bawah tanah akan dilakukan secara 2D menggunakan media peta jalur induk pipa air bawah tanah dan profil memanjang dari jalur induk pipa air bawah tanah. Selain itu untuk menambah perspektif dari pengguna, jalur induk pipa air bawah tanah akan dimodelkan secara 3D. Visualisasi 3D ini mencakup kenampakan 3D topografi di kawasan taman wisata Candi Prambanan yang dibentuk dari Digital Terrain Model dan model 3D jalur induk pipa air bawah tanah. DTM yang dibentuk dari data ukuran metode terestris memiliki ketelitian yang relatif tinggi hingga fraksi cm-m (Isioye, 2011). DTM yang memiliki ketelitian yang relatif tinggi maka posisi dan kedalaman dari pipa pun dapat ditentukan secara teliti karena kedalaman pipa diturunkan dari ketinggian pada DTM.
I.2. Lingkup Kegiatan
Pada kegiatan aplikatif ini akan membatasi permasalahan yang ada dengan menggunakan kriteria sebagai berikut:
1. Lokasi kegiatan di kawasan wisata candi Prambanan yaitu pada zona 2 yang terletak pada dua daerah administrasi yang berbeda yaitu di Kecamatan Prambanan , Kabupaten Sleman - DIY dan Kecamatan Prambanan, Kabupaten Klaten – JATENG . Lokasi kegiatan pada gambar I.1 .
Gambar I.1. Citra Google Earth kawasan Candi Prambanan (Sumber : Google Earth)
2. Pembuatan digital terrain model (DTM) kawasan taman wisata Candi Prambanan.
3. Jalur induk pipa air bawah tanah di kawasan taman wisata Candi Prambanan digambarkan secara planimetrik dalam bentuk peta situasi jalur induk pipa air dan profil memanjang jalur induk pipa air.
4. Pemodelan 3D jalur induk pipa air bawah tanah dengan ukuran pipa 6 inch berjenis pipa baja.
I.3. Tujuan Tujuan dari kegiatan aplikatif ini meliputi :
1. Membuat Digital Terrain Model (DTM) kawasan taman wisata Candi Prambanan berdasarkan data pengukuran terestris menggunakan total station.
2. Menggambarkan peta jalur induk pipa air bawah tanah secara planimetrik. 3. Menggambarkan kedalaman jalur induk pipa air bawah tanah dalam profil
memanjang.
4. Memodelkan kenampakan 3D jalur induk pipa air bawah tanah di kawasan taman wisata Candi Prambanan berbasiskan DTM yang sudah terbentuk.
I.4. Manfaat
Manfaat dari kegiatan aplikatif ini adalah tersediannya informasi spasial jalur induk pipa air bawah tanah di kawasan taman wisata Candi Prambanan dalam bentuk model 3D, peta jalur induk pipa air dan profil memanjang jalur induk pipa air yang berguna untuk menginventarisasi posisi dan kedalaman jalur induk pipa air. Setelah tersediannnya informasi spasial jalur induk pipa air ini maka akan memudahkan dan membantu kegiatan engineering untuk kepentingan peremajaan dan perawatan jalur induk pipa air di kawasan taman wisata Candi Prambanan serta meminimalkan kesalahan perencanaan karena sudah memiliki informasi spasial tentang jalur pipa air bawah tanah existing.
I.5. Landasan Teori I.5.1. Digital Terrain Model
Seiring berkembangnya teknologi, visualisasi permukaan tanah kini disajikan dalam bentuk digital yaitu menggunakan digital terrain model (DTM). DTM adalah representasi relief dari terrain serta informasi ketinggian dari permukaan bumi tanpa ada fitur alam maupun buatan manusia, namun DTM mencakup unsur – unsur dengan elevasi yang signifikan dari fitur topografi yakni unsur linier berupa breakline, mass point dan hidrologic condition sehingga DTM mampu memodelkan relief secara lebih realistik atau sesuai dengan kenyataan (ASPRS, 2007). DTM
hanya merepresentasikan permukaan tanah saja tanpa memperhatikan obyek diatasnya seperti pada gambar I.2 .
Gambar I.2. Contoh Digital Terrain Model (DTM)
Menurut Djurdjani (1999) model terain digital dapat disimpan dalam berbagai metode :
a. Data berdistribusi teratur yaitu data disimpan dengan spasi yang teratur antar titik sehingga membentuk suatu grid. Data elevasi direkam pada tiap spasi tertentu, sesuai dengan resolusi spasial dari grid tersebut. Bentuk dasar dari grid yang paling sering digunakan adalah bentuk persegi seperti gambar I.3.
Gambar I.3. Data distribusi teratur (Sumber : Nugroho, 2003)
b. Data berdistribusi semi teratur. Pada metode ini, distribusi penyimpanan data hanya teratur pada salah satu unsur datanya, sedangkan unsur data lainnya acak. Contohnya garis kontur pada peta yang merepresentasikan
ketinggian yang sama pada permukaan bumi dengan interval ketinggian tertentu yang konstan mempunyai keteraturan pada unsur Z, tetapi pada unsur X dan Y acak (gambar I.4).
Gambar I.4. Data berdistribusi semi teratur (Sumber : Nugroho, 2003)
c. Data berdistribusi acak adalah distribusi penyimpanan data yang tidak ada keteraturan pada setiap unsur datanya. Salah satu bentuk struktur data acak adalah TIN (Triangulated Irregular Networks) dengan segitiga-segitiga tak beraturan sebagai satuan datanya.
d. Fungsi permukaan. Pada metode ini menggunakan model matematis tertentu, namun metode ini cenderung hanya memberikan gambaran umum permukaan (trend surface) serta menghilangkan detil- detil lokal pada permukaan bumi karena detil-detil yang terdapat pada permukaan bumi sangat kompleks sehingga sulit disajikan dalam model matematis secara tepat.
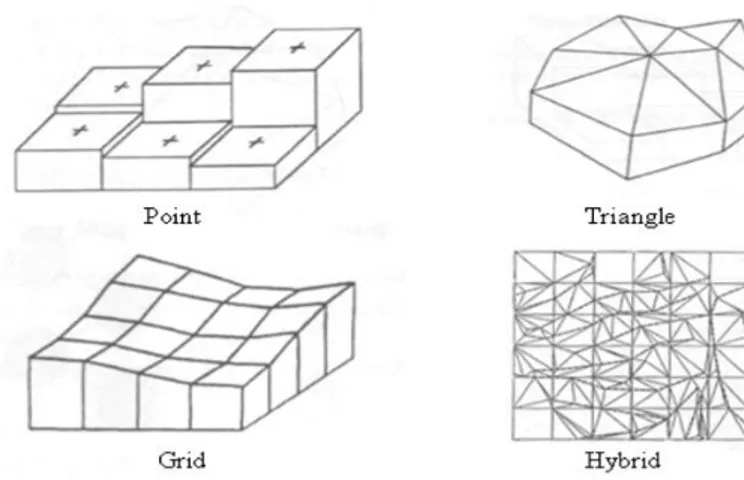
Nilai ketinggian pada dasarnya dapat direpresentasikan dengan titik atau dengan garis/bidang yang disusun berdasar algoritma berbasis jaringan segitiga, grid, maupun gabungannya (Atunggal, 2010) seperti ilustrasi gambar I.5 .
Gambar I.5. Representasi nilai ketinggian dengan point, triangle,grid dan hybrid (Sumber : Atunggal, 2010)
Sebagaian perangkat lunak dalam penarikan kontur menggunakan model terrain yang dibangun menggunakan algoritma Triangulated Irregular Networks (TIN) dan grid . Pada kegiatan aplikatif ini akan digunakan metode TIN dalam pembentukan garis kontur dan DTM .
I.5.1.1. Triangulated Irregular Networks (TIN). TIN adalah salah satu algoritma yang digunakan untuk pembentukan DTM dan penarikan garis kontur. TIN merupakan algoritma yang berdasar pada jaringan segitiga yang menghubungkan tiga titik (Wilson dan Gallant, 2000). TIN lebih efisien daripada menggunakan grid karena bentuk segitiga yang lebih rapat dan bervariasi dapat mencocokkan kekasaran permukaan. Perhitungan atribut topografi kadang-kadang lebih sulit menggunakan metode grid untuk daerah yang memiliki variasi permukaan yang banyak seperti gundukan , jurang dan lain-lain maka pendekatan TIN lebih dapat merepresentasikan bentuk dari permukaan (Wilson dan Gallant, 2000). Gambar I.6 berikut menggambarkan bentuk TIN dari beberapa titik sampel.
Gambar I.6. TIN yang terbentuk dari 5 titik sampel (Sumber : Atunggal ,2010)
Untuk membentuk TIN yang mampu merepresentasikan terrain dengan kualitas yang baik diperlukan data elevasi yang mewakali terrain, contohnya untuk daerah yang relatif terjal maka kerapatan pengambilan titik sampelnya lebih rapat jika dibandingkan dengan daerah yang relatif datar. Jika terdapat serangkaian titik (X ,Y) pada bidang datar, maka nilai dari titik-titik tersebut dapat divisualisasikan sebagai ketinggian Z pada bidang tersebut. Titik- titik pembentuk bidang-bidang segitiga pada TIN model merupakan nodal yang memiliki koordinat 3D (X, Y, Z), permukaan-permukaan segitiga-segitiga tersebut menjadi bidang interpolasi titik-titik yang ada didalamnya. Misal titik A1 (X1,Y2), A2 (X2, Y2), dan A3 (X3,Y3) terdapat pada satu bidang dan merupakan nodal-nodal dari sebuah segitiga serta memiliki nilai Z1, Z2, dan Z3, dengan demikian nilai semua titik (Z) pada posisi A (X, Y) dalam sebuah bidang segitiga adalah sebagai berikut :
Z = aX + bY + c ...(I.1) Persamaan (I.1) di atas merupakan persamaan dasar dari interpolasi linier. Untuk menentukan elevasi sebuah titik pada suatu bidang melalui interpolasi linier dengan teknik ini diperlukan minimal tiga buah titik agar koefisien- koefisien (a ,b ,c) pada persamaan tersebut dapat dipecahkan. Dari ketiga titik tersebut dapat dibentuk sistem persamaan linier sebagai berikut :
Z1 = aX1 + bY1 + c ...(I.2) Z2 = aX2 + bY2 + c ...(I.3) Z3 = aX3 + bY3 + c ...(I.4) Hasil interpolasi akan semakin baik jika bentuk segitiga penyusun TIN model sistematis yakni mendekati segitiga sama kaki dan hasil interpolasi semakin buruk jika perbandingan panjang salah satu sisinya dengan tinggi segitiga semakin besar (Guruh, 2007).
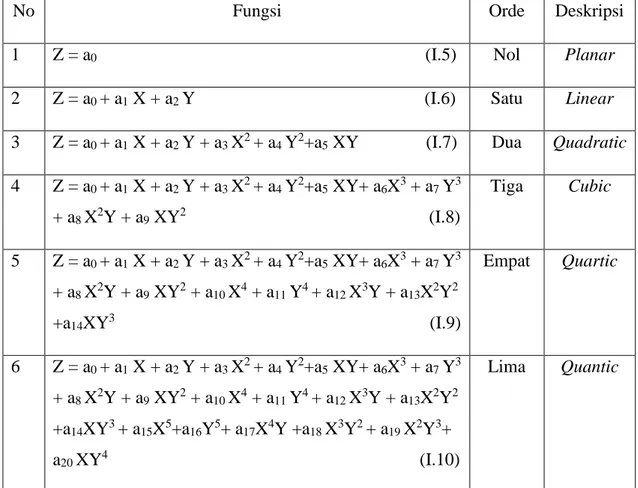
I.5.1.2. Jaring Segiempat atau Grid. Grid adalah algoritma yang digunakan untuk membuat DTM dan penarikan garis kontur menggunakan konsep jaring segiempat. Pada metode grid ini lebih menggunakan pendekatan matematis menggunakan fungsi polinomial (Zhilin Li, 2005) sebagai berikut :
Tabel I.1. Fungsi polinomial
No Fungsi Orde Deskripsi
1 Z = a0 (I.5) Nol Planar
2 Z = a0 + a1 X + a2 Y (I.6) Satu Linear
3 Z = a0 + a1 X + a2 Y + a3 X2 + a4 Y2+a5 XY (I.7) Dua Quadratic
4 Z = a0 + a1 X + a2 Y + a3 X2 + a4 Y2+a5 XY+ a6X3 + a7 Y3 + a8 X2Y + a9 XY2 (I.8) Tiga Cubic 5 Z = a0 + a1 X + a2 Y + a3 X2 + a4 Y2+a5 XY+ a6X3 + a7 Y3 + a8 X2Y + a9 XY2 + a10 X4 + a11 Y4 + a12 X3Y + a13X2Y2 +a14XY3 (I.9) Empat Quartic 6 Z = a0 + a1 X + a2 Y + a3 X2 + a4 Y2+a5 XY+ a6X3 + a7 Y3 + a8 X2Y + a9 XY2 + a10 X4 + a11 Y4 + a12 X3Y + a13X2Y2 +a14XY3 + a15X5+a16Y5+ a17X4Y +a18 X3Y2 + a19 X2Y3+ a20 XY4 (I.10) Lima Quantic
(Sumber : Zhilin Li, 2005) I.5.2. Pemetaan Topografi
Pemetaan topografi atau situasi merupakan pemetaan dari suatu lokasi/daerah yang mencakup penyajian dalam bentuk horizontal dan vertikal dalam suatu gambaran yang disebut peta topografi (Davis, 1981). Peta topografi adalah peta yang menggambarkan fitur-fitur alami dan buatan manusia. Pengukuran horizontal dan vertikal serta detil disebut juga pengukuran situasi. Jumlah detil topografi yang diukur harus merepresentasikan kenampakan permukaan bumi yang sebenarnya, semakin rapat mengambil detil maka kenampakan aslinya pun akan lebih sesuai namun kerapatan detil yang diambil sesuai dengan skala peta yang akan dibuat. Kerapatan detil untuk skala 1:250 berbeda dengan skala1:10000. Untuk skala 1:250 mempunyai arti 1 cm ukuran dipeta sama dengan 250 cm dilapangan atau 2,5 meter dilapangan maka setiap obyek yang memiliki dimensi 2,5 meter di lapangan akan tergambar 1 cm dipeta.
Representasi kenampakan topografi dari segi vertikalnya direpresentasikan menggunakan garis kontur pada peta. Garis kontur adalah garis khayal di lapangan yang menghubungkan titik dengan ketinggian yang sama, garis kontur dapat diartikan juga sebagai garis kontinyu diatas peta yang memperlihatkan titik-titik dengan ketinggian yang sama (Basuki, 2006). Fungsi lain dari garis kontur adalah untuk memberikan informasi slope (kemiringan tanah), irisan profil memanjang atau melintang permukaan tanah, dan perhitungan galian serta timbunan. Interval kontur adalah selisih tinggi atau jarak vertikal antara dua buah garis kontur yang berurutan. Besarnya interval kontur secara umum dinyatakan dengan rumus 1/2000 x angka penyebut skala (dalam meter).
Garis kontur mempunyai beberapa sifat antara lain (Basuki, 2006) : a. Tidak berpotongan.
b. Tidak bercabang. c. Tidak bersilangan.
d. Semakin jarang menunjukkan daerah yang semakin datar. e. Semakin rapat menunjukkan daerah yang semakin curam. f. Tidak berhenti didalam peta.
Pelaksanaan pengukuran topografi meliputi beberapa prosedur sebagi berikut : I.5.2.1. Kerangka Kontrol Peta. Pengadaan kerangka kontrol pemetaan merupakan tahapan awal yang dilakukan dalam kegiatan survei topografi. Adapun kerangka kontrol pemetaan terbagi atas dua macam yaitu: kerangka kontrol horisontal dan kerangka kontrol vertikal.
a. Kerangka Kontrol Horisontal
Pengukuran kerangka kontrol horisontal dimaksudkan untuk memperoleh nilai koordinat 2D (X,Y) titik kontrol pemetaan yang teliti. Pengukuran kerangka kontrol horisontal pemilihan dan pemakaiannya ditentukan oleh banyak faktor, antara lain luas daerah yang dipetakan, ketersediaan peralatan dan kemudahan perhitungan. Ada berbagai metode yang dapat digunakan, antara lain metode terestris dan extra-terestris. Metode terestris yang sering dipakai yaitu adalah poligon, triangulasi, trilaterasi, pemotongan ke muka, dan pemotongan ke belakang (Basuki, 2006). Pada kegiatan aplikatif ini metode yang digunakan adalah metode pengamatan
GNSS secara relatif statik untuk titik kontrol utamanya, sedangkan untuk titik kontrol perapatan detil situasi menggunakan metode RTK-GNSS via radio. Titik kontrol perapatan ini dibuat secara berpasangan dan saling terlihat untuk keperluan penentuan azimut definitif.
b. Kerangka Kontrol Vertikal.
Pada pengukuran kerangka kontrol vertikal dapat dilakukan dengan metode barometris, takhimetri, metode waterpass maupun dengan metode extra-terestris. Jika pengukuran dilakukan menggunakan teknologi GNSS perlu dilakukan reduksi menggunakan undulusi geoid untuk mengetahui tinggi titik terhadap geoid bukan ellipsoid lagi namun pada kegiatan aplikatif ini menggunakan metode GNSS dengan tinggi yang digunakan adalah tinggi lokal.
I.5.2.2. Pengukuran Detil . Tahapan setelah pengadaan kerangka kontrol pemetaan adalah pengukuran titik detil. Titik detil yang diambil pada kegiatan aplikatif ini merupakan detil- detil yang ada pada kawasan taman wisata candi seperti jalan aspal, jalan paving , jalan beton, bangunan, pagar , taman, gazibu, drainase, tempat sampah, jaringan utilitas permukaan (hidran, gengset, panel telepon, pompa, dan lain-lain), sedangkan untuk kenampakan alamnya berupa vegetasi, sungai dan titik tinggi. Metode pengambilan detil yang digunakan dalam kegiatan aplikatif ini adalah metode polar untuk mendapatkan posisi spasial (X,Y) dan metode takhimetri untuk mendapatkan posisi ketinggiannya (Z) menggunakan total station.
Dari data topografi ini selanjutnya akan dibuat DTM kawasan taman wisata Candi Prambanan. Variasi ketinggian nanti akan terlihat pada model permukaan yang akan dibuat. Jalur induk pipa air di kawasan Candi Prambanan terletak di bawah tanah maka pengukuran topografi yang teliti akan berpengaruh pada posisi dan kedalaman jalur induk pipa air bawah tanah.
I.5.3. Metode RTK-GNSS
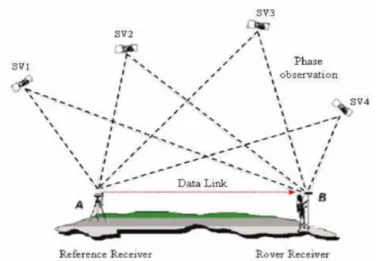
RTK (Real Time Kinematic) merupakan metode berbasiskan pada carier phase dalam penentuan posisi secara relatif dengan tingkat ketelitian mencapai satuan centimeter secara real time. Prinsip penentuan posisi secara RTK dengan cara
menggunakan satu stasiun penerima siyal (referensi/base station) dan beberapa rover (receiver) yang dapat bergerak (mobile). Stasiun referensi penerima sinyal carrier phase dan unit rover yang bergerak membandingkan pengukuran fase itu sendiri dengan membandingkan pengukuran fase yang diterima dari stasiun referensi (base stasion) sehingga nantinya didapat data koreksi yang dibutuhkan untuk pengukurannya secara Real Time.
Gambar I.7. Konsep pengukuran RTK GNSS (Sumber : Atunggal, 2010)
Gambar I.7 menerangkan tentang konsep pengukuran RTK GNSS. Ada 3 komponen penting dalam pengukuran menggunkan metode RTK (Abidin, 2000), yaitu :
1. Stasiun Referensi
Stasiun referensi atau base station ini terdiri dari receiver dan antena. Base station ini berfungsi untuk mengolah data differensial dan melakukan koreksi carrier phase yang dikirimkan via radio modem base station ke radio modem rover.
2. Stasiun Rover
Fungsi rover adalah untuk mengidentifikasi satelit-satelit pada daerah pengamatan dan menerima data differensial dan koreksi carrier phase dari base station. Cara kerja rover dalam melakukan pengukuran secara RTK dengan cara menggerakkan rover (mobile) dari suatu titik ke titik lainnya yang ingin diketahui posisinya. Koreksi carrier phase tersebut dikirim via
radio link dengan radio modem antara base station dan rover sehingga bisa mendapatkan posisi yang lebih teliti.
3. Data Link (Hubungan data) differensial
Data link ini berfungsi mengirimkan data differensial dan koreksi carrier phase dari base station ke rover melalui radio modem. Kecepatan radio modem dan band frekuensi pada base station dan rover harus sama sehingga proses pengiriman data bisa lancar. Jenis-jenis band frekuensi yang dimanfaatkan dalam survei GPS-RTK meliputi:
a. UHF (Ultra Height Frequency)
Bekerja pada frekuensi antara 300 Mhz sampai 3 Ghz dengan panjang gelombang antara 10 cm sampai dengan 1m.
b. VHF (Very Height Frequency)
Bekerja pada frekuensi antara 30 Mhz sampai 300 Mhz dengan panjang gelombang antara 1 m sampai dengan 10 m.
c. HF (Height Frequency)
Bekerja pada frekuensi antara 3 Mhz sampai 30 Mhz dengan panjang gelombang antara 10 m sampai dengan 100 m.
Pengukuran pada metode RTK memiliki 3 jenis solusi ,yaitu: 1. Fixed
Sudah terhubung dengan base station, memiliki ketelitian posisi 1 sampai dengan 5 cm, ambiguitas fase sudah terkoreksi, jumlah satelit yang ditangkap lebih dari 4, bias multipath terkoreksi dan LQ( Link Quality) 100%.
2. Float
Sudah terhubung dengan base station, memiliki ketelitian posisi lebih dari 5 cm, ambiguitas fase belum terkoreksi, jumlah satelit yang ditangkap kurang dari 4 (too few satellite), bias multipath belum terkoreksi.
3. Standalone
Tidak terhubung dengan base station, memiliki ketelitian posisi lebih dari 1 m, ambiguitas fase belum terkoreksi secara diferensial, jumlah satelit yang ditangkap kurang dari 4 (too few satellite), bias multipath belum terkoreksi.
Sistem RTK berkembang setelah diperkenalkannya suatu teknik untuk memecahkan ambiguitas fase disaat receiver dalam keadaan bergerak yang dikenal dengan metode penentuan ambiguitas fase secara On The Fly (OTF) . Setelah adanya radio modem sehingga proses pengiriman data atau koreksi fase dapat dilakukan secara seketika membuat informasi posisi yang dihasilkan oleh sistem ini dapat diperoleh secara seketika (Rahmadi, 1997). Ketelitian tipikal posisi yang diberikan oleh sistem RTK adalah sekitar 1 sampai dengan 5 cm, dengan asumsi bahwa ambiguitas fase dapat ditentukan secara benar (Abidin, 2000).
Teknologi RTK GNSS via Radio ini diterapkan dalam pengadaan titik kontrol perapatan detil . Pengaplikasian metode RTK GNSS radio akan lebih mempercepat akuisisi data titik kontrol perapatan detil yang menyebar diseluruh area pemetaan dan dibuat secara berpasangan. Ketelitian yang didapatkan pun akan lebih teliti jika rover station dalam akuisisi datanya menggunakan statif dan direkam dalam kurun waktu beberapa menit. Dengan demikian posisi titik kontrol perapatan detil akan lebih mendapatkan hasil yang optimal dibandingkan jika harus menggunakan metode poligon yang menghabiskan waktu lama.
I.5.4. Akuisisi Data DTM dengan Metode Terestris
Akuisisi data DTM dengan metode terestris menggunakan alat ukur total station (TS). Pengambilan data DTM ini menggunakan titik kontrol perapatan hasil pengukuran RTK GNSS radio. Metode pengambilan detil dibagi menjadi dua cara yaitu akuisisi data spasial (X,Y) menggunakan metode pengikatan secara polar dan akuisisi data tinggi (Z) menggunakan metode takhimetri.
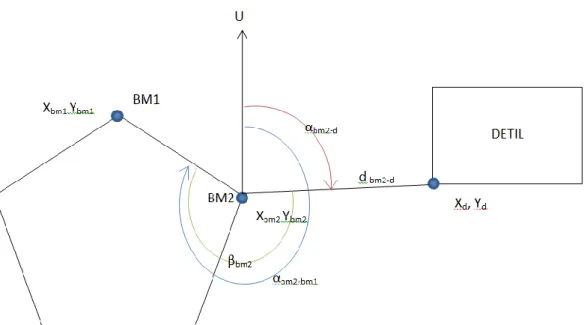
I.5.5.1. Metode polar. Metode polar merupakan metode pengikatan detil planimetrik menggunakan data ukuran jarak dan sudut, serta diketahui azimut dan koordinat titik awalnya seperti ilustrasi gambar I.8 dibawah ini.
Gambar I.8. Ilustrasi pengikatan detil metode polar Keterangan :
Xd,Yd : Koordinat planimetrik titik detil
Xbm2, Ybm2 : Koordinat planimetrik titik BM2
Xbm1, Ybm1 : Koordinat planimetrik titik BM1
αbm2-bm1 : Azimut BM2 ke BM1
αbm2-d : Azimut BM2 ke titik detil
βbm2 : Sudut ukuran yang dibentuk antara BM1-BM2-titik detil
Dbm2-d : Jarak ukuran dari BM2 ke titik detil
Dari ilustrasi gambar dapat dihitung nilai koordinat Xd,Yd dengan cara metode
polar yaitu seperti pada persamaan I.11 dan I.12 dibawah ini.
Xd = XBm2 + DBm2-d . Sin αbm2-d ……….(I.11)
Yd = YBm2 + DBm2-d . Cos αbm2-d ………(I.12)
Parameter yang diukur adalah DBm2-d dan βbm2 , sedangkan αbm2-d dapat dicari
αbm2-d = αbm2-bm1 - βbm2 ...(I.13)
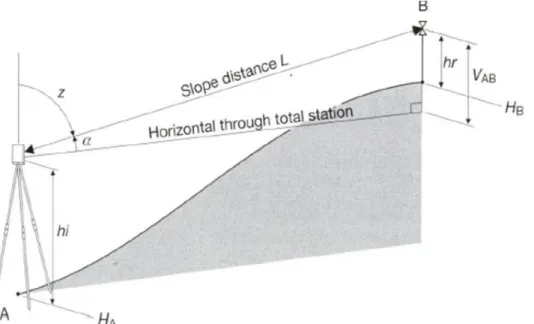
I.5.5.2. Metode takhimetri. Arti per kata tachymetri : tacheo = cepat, metri = pengukuran. Bearti takhimetri adalah salah satu metode penentuan tinggi secara cepat menggunakan prinsip pemetaan digital. Takhimetri sangat cocok digunakan untuk pengukuran detil. Dimana jarak detil ditentukan dengan cara elektronis, beda tinggi ditentukan dengan bacaan sudut vertikal atau sudut miring, dan arah ditentukan dengan sudut horizontal (Basuki,2006). Perhitungan tinggi secara takhimetri tersaji dalam gambar I.9 berikut.
Gambar I.9. Ilustrasi metode takhimetri (Sumber : Atunggal,2010) Keterangan :
HA : Tinggi titik A
hi : Tinggi instrument titik A
α : Sudut helling Z : Sudut zenith
L : Jarak miring dari alat ukur TS mulai dari titik A ke titik B hr : Tinggi reflektor titik B
VAB : Jarak vertikal antara titik A dengan titik B
Dari parameter-parameter ukuran di atas tinggi titik B (HB) dapat dicari
menggunakan metode takhimetri menggunakan persamaan I.14 .
HB = HA + hi + VAB – hr ………. (I.14)
VAB dapat dicari menggunakan persamaan I.15 di bawah ini .
VAB = L . Cos Z = L . Sin α …………...(I.15)
I.5.5. Uji Ketelitian Digital Terrain Model (DTM)
I.5.5.1. Penentuan titik uji. Penentuan titik uji diusahakan dipilih pada daerah yang relatif datar, akan tetapi kondisi tersebut tidak selalu bisa memungkinkan mengingat kondisi medan dan permukaan yang selalu dinamis. Kemiringan terrain tidak boleh lebih curam dari 20% karena kesalahan horisontal akan mempengaruhi perhintungan RMSE (root mean square error) vertikal. Pemilihan titik uji yang kemiringannya lebih curam melebihi batas 20% dapat menyebabkan kesalahan dalam melakukan interpolasi linier. Kesalahan ini akan mempengaruhi ketelitian elevasi titik uji, dan pemilihan titik uji perlu menyebar secara merata pada lokasi survei (Flood, 2004). I.5.5.2. Uji global. Data yang digunakan adalah data yang terbebas dari kesalahan besar atau blunder. Agar mendapatkan data yang terbebas dari blunder maka dilakukan seleksi menggunakan uji global agar data blunder dapat dihilangkan atau dibuang sehingga data yang digunakan untuk proses selanjutnya dapat dipercaya. Uji global dilakukan dengan membuat rentang kepercayaan menggunakan simpangan baku (σ) pada data sebesar -3σ <X – Ẋ< 3σ (Sudjana, 2005). Apabila nilai data terletak diantara rentang tersebut maka data dapat digunakan dalam proses selanjutnya. Simpangan baku (σ) dihitung dengan persamaan I.16 di bawah ini.
σ=√
∑ (∆Zi - ∆Ź) 2 n i=1 n - 1 ………. (I.16) Keterangan : σ : Simpangan baku (m).∆ Zi : Selisih elevasi DTM dengan elevasi titik uji pada data ke i (m).
n : Jumlah titik.
I.5.5.3. Ketelitian elevasi. Ketelitian DTM salah satunya ditentukan oleh besarnya RMSE dari elevasi. Tingkat ketelitiannya secara absolut ditunjukkan dengan besarnya nilai RMSE elevasi. RMSE elevasi didapat dari hitungan kuadrat akar rata-rata perbedaan nilai elevasi yang didapat dari DTM dengan data hasil ukuran independen di lapangan yang mempunyai ketelitian lebih tinggi dengan rumus matematis pada persamaan I.17 menurut Accuracy Standards for Digital Geospatial Data (ASPRS, 2013).
RMSE
=
√
∑ (ZDTM - Z Lapangan) 2 n i=1 n ……….. (I.17) Keterangan : ZDTM : Nilai Z pada DTM (m)ZLapangan : Nilai Z pada lapangan (m)
n : Jumlah titik
DTM hasil pengukuran terestris yang dilakukan pada kegiatan aplikatif ini masuk kedalam kelas II karena pengukuran terestris dilakukan pada lokasi yang relatif sempit atau lokal. Untuk pengukuran terestrsis menggunakan alat ukur total station akurasi sama dengan 5-7 cm pada kelas II menurut spesifikasi ketelitian vertikal pada Accuracy Standards for Digital Geospatial Data (ASPRS, 2013) .
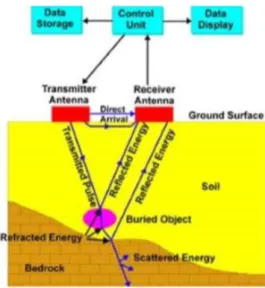
I.5.6. Survei Ground Penetrating Radar (GPR)
Data kedalaman jalur induk pipa air diperoleh dengan cara pengukuran Ground Penetrating Radar (GPR). Georadar atau Ground Penetrating Radar (GPR) adalah salah satu metode geofisika yang bertujuan untuk mendapat citra kondisi bawah permukaan bumi (Daniel, 2004). Metode ini bersifat tidak merusak dan mempunyai resolusi yang tinggi, tetapi terbatas sampai kedalaman beberapa meter saja. GPR sebenarnya bekerja atas dasar teknologi yang sudah lama yaitu radar. Prinsipnya adalah alat ini memencarkan (transmisi) dan menerima (refleksi) gelombang elektromagnetik (EM) frekuensi tinggi yaitu antara 1MHz – 1GHz (Daniel, 2004). Gambar I.10 mengilustrasikan skema pengukuran GPR.
Gambar I.10. Skema GPR (Sumber : Daniel, 2004)
Setelah memperoleh data GPR, maka data ini harus diproses. Untuk mempermudah teknik interpretasi dan visualisasi maka data perlu diolah menggunakan teknik seperti berikut :
a. Konversi data ke penggunaan format digital.
b. Penghilangan/minimalisasi gelombang direct dan gelombang udara dari data.
c. Penyesuaian amplitudo pada data. d. Penyesuaian penguatan pada data. e. Penyesuaian statis pada data. f. Filtering data.
g. Velocity analisis. h. Migrasi.
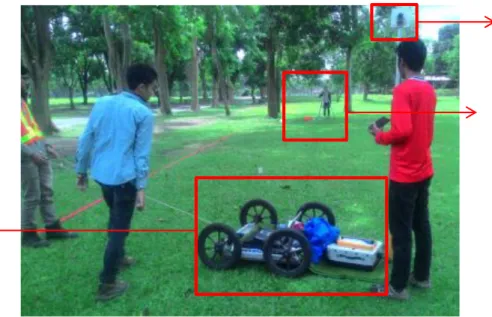
Pemetaan pipa bawah tanah dengan menggunakan GPR dilakukan dengan melakukan pengukuran cross section koridor 10-20 m sepanjang jalur induk pipa air yang akan dipetakan dengan interval 5-15 m. Penentuan posisi titik pengukuran GPR ditentukan dengan menggunakan Total Station (TS) seperti disajikan pada gambar I.12. Sensor GPR diatur untuk fokus mendeteksi obyek dibawah permukaan tanah pada kedalaman kurang dari 5 m.
Gambar I.11. Pemetaan GPR untuk memetakan jalur pipa bawah tanah
Penentuan posisi titik pengukuran GPR ditentukan dengan menggunakan Total Station (TS). Pengukuran TS ini menghasilkan koordinat pada titik awal pengukuran GPR dan titik akhir pengukuran GPR. Selain koordinat titik awal GPR dan titik akhir GPR diukur juga waktu tempuh alat GPR dari titik awal ke titik akhir dengan asumsi kecepatan GPR konstan sehingga posisi pipa dapat ditentukan dari fungsi waktu. Gambar I.12 di bawah ini menunjukan penentuan posisi pipa .
Gambar I.12. Ilustrasi penentuan posisi pipa GPR
Prisma
Keterangan :
: Jalur pipa
: Cross section pengukuran GPR
XA, YA : Koordinat planimetrik titik awal pengukuran GPR
XB, YB : Koordinat planimetrik titik akhir pengukuran GPR
XP, YP : Koordinat planimetrik titik pipa bawah tanah
∆tAB : Waktu tempuh dari titik awal ke titik akhir pengukuran GPR
∆tAP : Waktu tempuh dari titik awal ke titik indikasi pipa
Berdasarkan gambar I.12 posisi pipa (XP, YP) dapat ditentukan menggunakan
interpolasi linear dari fungsi waktu. Interpolasi linear ini menggunakan data pengukuran ∆tAB dari alat GPR sedangkan ∆tAP hasil interpretasi pipa pada data
pengukuran GPR. Persamaan interpolasi linear posisi pipa disajikan pada persamaan I.18 dan I.19 seperti di bawah ini.
XP = XA+ ∆tAP ∆tAB ∙ (XB− XA) ……….. (I.18) YP = YA+ ∆tAP ∆tAB ∙ (YB− YA) ……….….. (I.19)
Selanjutnya untuk posisi tinggi (Z) pipa dihitung menggunakan nilai kedalaman hasil pengukuran GPR dengan bidang acuan DTM. Sebelumnya perlu dicari nilai Z pipa pada bidang DTM menggunakan metode drape. Drape merupakan langkah mencari nilai ketinggian (Z) pada DTM berdasar posisi planimetrik (X,Y) yang diketahui. Setelah nilai Z pada DTM sudah didapatkan maka nilai Z pipa bawah tanah dapat dihitung menggunakan persamaan I.20 di bawah ini.
ZP = Z DTM – D Pipa ……….(I.20)
Keterangan :
ZP : Tinggi pipa (m)
ZDTM : Tinggi pipa pada DTM (m)
I.5.7. Pemodelan 3D
Pemodelan obyek adalah pemanfaatan piranti lunak khusus dalam proses penggambaran obyek alami maupun buatan yang ada di dunia nyata (misalnya : gedung, jembatan atau bukit) menjadi bentuk yang dapat direpresentasikan secara matematis di layar komputer untuk tujuan penyimpanan informasi dan analisis (Muhammad, 2012). Obyek 3D itu sendiri adalah adalah kumpulan geometri yang terdiri dari titik-titik X,Y, Z pada ruang 3D (gambar I.13).
Gambar I.13. Contoh obyek 3D (Sumber : 3DCADBrowser.com)
Pada kegiatan pembuatan model 3D jalur pipa ini menggunakan prinsip boundary representation (BREP). BREP adalah pemodelan obyek 3D dengan prinsip pemanfaatan topologi dan geometri. Topologi adalah elemen muka (faces), tepi (edges), titik (vertices), sedangkan geometri yang digunakan adalah permukaan 2D, kurva/garis 1D, dan titik 0 D (Muhammad, 2012). Teknik penyajian model 3D agar terlihat seperti nyata perlu dilakukan teknik surface rendering pada obyek. Surface rendering adalah prosedur yang menerapkan model pencahayaan untuk mendapatkan intensitas semua titik pada seluruh permukaan tampak. Model pencahayaan adalah model untuk menghitung intensitas cahaya pada satu titik pada suatu permukaan.
Teknik surface rendering terbagi menjadi dua metode yaitu metode ray-tracing dan scan-line. Ray-tracing adalah metode melakukan perhitungan dengan model pencahayaan untuk semua titik yg tampak, sedangkan scan-line adalah metode melakukan interpolasi untuk titik-titik pada permukaan dari sekumpulan intensitas hasil perhitungan dengan model pencahayaan. Algoritma yang digunakan dalam
scan-line ada tiga algoritma yaitu flat (constant-intensity) shading ,gouraud shading dan phong shading. Perbedaan ketiga algoritma tersebut dapat dilihat pada gambar I.14.
Gambar I.14.Perbedaan algoritma flat shading, gouraud shading dan phong shading (Sumber : mohiqbal.staff.gunadarma.ac.id)
Menurut Mulyatno dan Supriyanto (2011) berikut manfaat dan kelebihan dari penggambaran objek pemodelan 3 Dimensi :
1. Melihat objek secara 3D berarti melihat objek dalam bentuk sesungguhnya. 2. Penggambaran 3D akan lebih memperjelas maksud dan perancangan objek
karena bentuk sesungguhnya dari objek yang akan diciptakan divisualisasikan secara nyata.
3. Proses penggambaran 3D tidak memakan banyak waktu, karena penggambaranobjek dilakukan secara utuh.
4. Pemodelan 3D menjadikan model presentasi yang sempurna bagi owner project.
5. Memberikan kemudahan dalam hal memberikan penjelasan teknis kepada Owner Project.
I.5.8. Sistem Distribusi Air Bersih di Taman Wisata Candi Prambanan
Sebagai kawasan wisata PT. Taman Candi Prambanan perlu memiliki sistem distribusi air bersih yang baik. Menurut Dharmasetiawan (1993) pendistribusian air dilakukan dengan saluran tertutup atau dengan sistem perpipaan dengan maksud supaya tidak terjadi kontaminasi terhadap air yang mengalir di dalamnya. Selain itu dengan sistem perpipaan air lebih mudah untuk dialirkan karena adanya tekanan air. Komponen dari sistem distribusi adalah penampungan air (reservoir) dan sistem perpipaan.
I.5.8.1. Penampungan air (reservoir). Penampungan air (reservoir) adalah suatu bangunan yang menampung air sementara sebelum di distribusikan ke fasilitas-fasilitas yang membutuhkan air bersih (Immanuel dan Indrawan, 2014) . Konstruksi reservoir harus mampu melindungi air agar terhindar dari kontaminasi dari luar sehingga air yang disimpan tetap layak untuk dimanfaatkan. Konstruksi reservoir dapat terbuat dari bahan beton, baja maupun kayu. Di kawasan taman wisata Candi Prambanan memiliki dua reservoir. Reservoir utama terletak di sebelah selatan Kantor Unit PT. Taman Wisata Candi Prambanan (gambar I.15). Reservoir utama ini menampung air dari dua sumber yaitu air dari sumur bor dan air dari PDAM. Resorvoir yang kedua berada di sebelah timur gedung Teater Rama Shinta. Kedua reservoir ini mempunyai konstruksi dari beton.
I.5.8.2. Sistem perpipaan. Pipa adalah saluran tertutup yang digunakan untuk mengalirkan fluida (Putra, 2013) , sedangkan sistem perpipaan merupakan rangkaian pipa yang menghubungkan antara reservoir dengan fasilitas pengguna air bersih. Secara hirarki disusun menurut banyak jumlah air yang dibawa. Hirarki dalam sistem perpipaan berupa pipa induk, pipa sekunder/tersier atau pipa retikulasi dan pipa-pipa layanan (service). Pada sistem perpipaan tekanan air di pipa induk akan lebih tinggi dari yang ada di pipa retikulasi dan pengaturannya antara kedua jenis pipa ini dilakukan oleh valve atau valve pengatur tekanan (Immanuel dan Indrawan, 2014). Valve adalah sebuah perangkat yang mengatur, mengarahkan atau mengontrol aliran dari suatu cairan dengan membuka, menutup, atau menutup sebagian dari jalan alirannya seperti pada gambar I.16, sedangkan debit air yang mengalir di pipa mengalir secara satu arah yaitu pipa induk ke pipa retikulasi. Untuk itu antara pipa induk dan pipa sekunder dilengkapi dengan valve. Pada kegiatan aplikatif ini akan memodelkan jalur induk pipa air yang berada di kawasan taman wisata Candi Prambanan.
Gambar I.16. Contoh valve
(Sumber : Immanuel dan Indrawan, 2014)
I.5.9. Jenis Jaringan Pemipaan
Jalur pipa yang dimodelkan dalam kegiatan ini merupakan jalur induk pipa air . Pada sistem pemipaan dikenal juga jenis jaringan pemipaan. Menurut (Immanuel dan Indrawan, 2014) jenis jaringan pemipaan dibedakan menjadi sistem jaringan pemipaan seri , sistem jaringan pemipaan bercabang (branch) , sistem jaringan pemipaan tertutup (loop) dan sistem jaringan pemipaan kombinasi.
I.5.9.1. Sistem jaringan pemipaan seri. Sistem jaringan pemipaan seri adalah jaringan pipa tanpa cabang atau pun loop. Jaringan ini memiliki satu sumber, satu ujung dan node yang menyambung dua pipa yang berada dalam satu jalur. Jaringan pemipaan jenis ini sangat kecil dan dipakai untuk pendistribusian air kawasan yang kecil (Gambar I.17).
Gambar I.17. Pipa jaringan seri (Sumber : Immanuel dan Indrawan, 2014)
I.5.8.2. Sistem jaringan pemipaan bercabang. Sistem jaringan pemipaan bercabang merupakan jaringan susunan seri yang memiliki satu sumber namun terdiri dari banyak cabang. Sistem jaringan ini memiliki jangkauan yang luas untuk memenuhi kebutuhan air namun investasi yang dikeluarkan tidak terlalu besar. Di kawasan taman wisata Candi prambanan menggunakan sistem jaringan pemipaan bercabang (branch) (Gambar I.18).
Gambar I.18. Pipa jaringan bercabang (Sumber : Immanuel dan Indrawan, 2014)
I.5.8.3. Sistem jaringan pemipaan tertutup (loop). Sistem jaringan pemipaan tertutup (loop) merupakan sistem yang jaringannya saling terhubung yang terdiri dari node-node yang menerima aliran air lebih dari satu bagian seperti pada gambar I.19. Namun sistem pemipaan dengan jaringan ini lebih rumit jika dibandingkan dengan sistem seri atau bercabang. Sementara itu untuk biaya operasi dan investasi yang dikeluarkan cukup besar. Sistem ini biasanya dipakai pada daerah yang cukup luas.
Gambar I.19. Sistem jaringan pemipaan tertutup (Loop) (Sumber : Immanuel dan Indrawan, 2014)
I.5.8.4. Sistem jaringan pemipaan kombinasi. Sistem perpipan kombinasi merupakan sistem jaringan pemipaan yang umum digunakan untuk daerah yang luas. Sistem ini merupakan gabungan antara sistem dengan jaringan bercabang dan loop seperti pada gambar I.20.
Gambar I.20. Sistem jaringan pemipaan kombinasi (Sumber : Immanuel dan Indrawan, 2014)
I.5.10. Autocad Civil 3D
AutoCAD adalah sebuah program aplikasi (software) yang digunakan untuk menggambar dan mendesain gambar, seperti pada bidang rekayasa, konstruksi, perkapalan , otomotif dan lain-lain. Program AutoCAD mempunyai kemudahan dan keunggulan untuk membuat gambar dengan cepat dan akurat serta bisa digunakan
untuk memodifikasi gambar dengan cepat. Menggunakan AutoCAD seorang engineer bisa mengekspresikan dan menuangkan semua konsep dan perencanaannya dengan lebih luas dan detail. AutoCAD muncul setelah teknologi menggambar teknik secara manual yaitu dengan menggunakan papan drawing, dirasa sudah tidak efisien lagi. Penggunaan AutoCAD akan mencapai hasil presisi sebuah gambar perencanaan menjadi lebih akurat, detail dan cepat.
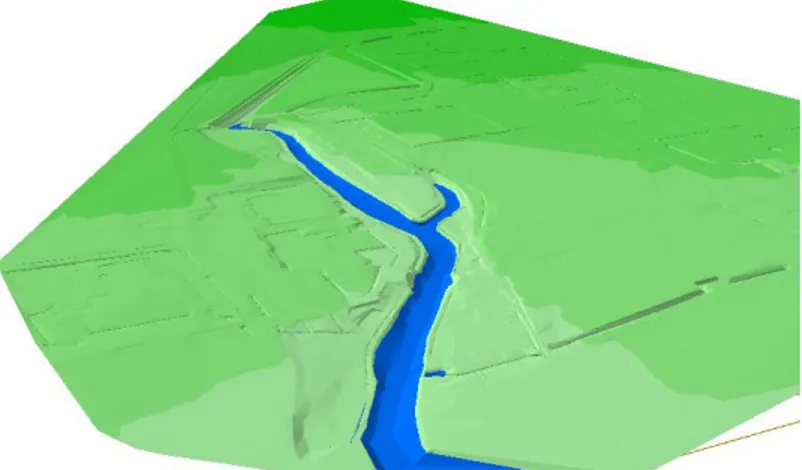
Software AutoCAD yang digunakan dalam kegiatan aplikatif ini adalah AutoCAD civil 3D. Kapabilitas software AutoCAD civil 3D dapat menyajikan model terrain digital (gambar I.21) dengan berbagi metode. Metode yang digunakan dalam kegiatan ini untuk menampilkan DTM adalah metode TIN.
Gambar I.21. DTM di AutoCAD
Sementara itu AutoCAD civil 3D dapat membuat obyek 3D. Salah satu obyek 3D yang dapat dibuat adalah pipa berikut strukturnya. Obyek pipa yang dibuat dapat dirander dan divisualisasikan beserta DTM . Gambar I.22 berikut merupakan salah satu contoh model 3D pipa.