5
BAB II LANDASAN TEORI
2.1 Geologi Regional Cekungan Truxton Area
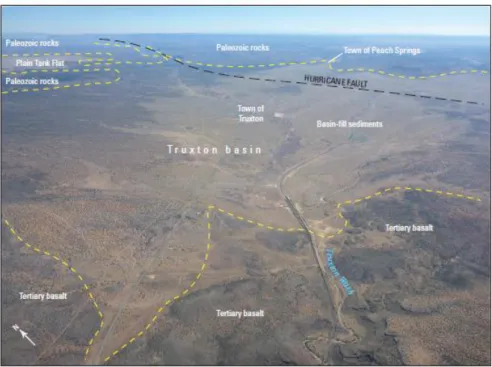
Pada Gambar 2.1 geologi Arizona Barat digambarkan dengan suatu bentang alam gurun secara luas pada jurang dan dinding tebing di Dataran Tinggi Hualapai yang berbatasan dengan cekungan Truxton. Cekungan Truxton adalah cekungan dengan topografi kecil yang diisi dengan endapan Kuarter, Tersier dan batuan vulkanik yang melapisi batuan metamorf kristal Proterozoikum di barat atau batuan sedimen Kambrium di timur. Dataran Tinggi Hualapai adalah blok besar batuan sedimen dengan usia Paleozoikum yang dibelah oleh banyak canyon (Mason, Bills, & Macy, 2020).
Gambar 2. 1 Foto Udara Cekungan Truxton, Arizona (Mason, Bills, & Macy, 2020)
Cekungan Truxton merupakan depresi topografi dengan luas 75 mil persegi yang relatif kecil dan terletak di tepi Utara Zona Transisi. Persebaran geologi di Arizona bagian Tengah yang merupakan transisi antara sebagian besar lapisan batuan sedimen sedikit terangkat dari Dataran Tinggi Colorado ke Timur Laut daerah Cekungan dan Pegunungan dengan sesar dan patahan yang terkikis ke Barat dan
6
Selatan zona transisi (Fenneman, 1931). Zona transisi tersebut memilki karakteristik yang sama dengan kedua daerah bagian secara fisiografi.
2.2 Stratigrafi Daerah Penelitian
Metode gayaberat telah berhasil digunakan dalam studi tentang cekungan Aluvial di Provinsi Range dan Pegunungan di seluruh Amerika Serikat bagian Barat Daya (Saltus & Jachens, 1995). Di cekungan yang dekat di sebelah Barat wilayah penelitian, Lembah Hualapai, kedalaman basement rock hingga 500 meter menurut data gayaberat (Ivanich & Conway, 2009), (Truini, Beard, Kennedy, & Anning, 2013). Cekungan yang berbeda di lembah Truxton tidak teridentifikasi pada peta kedalaman umum basement rock yang mencakup negara bagian Arizona (Richard, Shipman, Greene, & Harris, 2007).
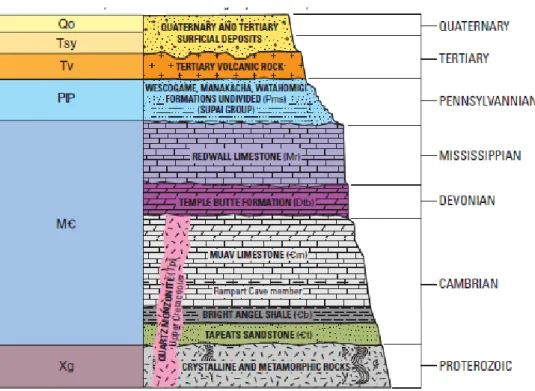
Gambar 2. 2 Stratigrafi Daerah Penelitian (Richard, Reynolds, Spencer, & Pearthee, 2000) (Bilingsley, Block, & Dyer, 2006)
Berdasarkan pada Gambar 2.2 menunjukkan bagian stratigrafi umum untuk cekungan Truxton, bagian Barat Arizona. Stratigrafi dari (Richard, Reynolds, Spencer, & Pearthee, 2000) dan (Bilingsley, Block, & Dyer, 2006) merupakan
7
kombinasi dari kedua peta yang diinterpretasikan dalam sebuah endapan permukaan Kuarter dan Tersier.
2.3 Struktur Geologi
Wilayah penelitian ini terdiri dari batuan sedimen Paleozoikum dan Kenozoikum serta batuan vulkanik yang didasari oleh basement rock Proterozoikum (Mason, Bills, & Macy, 2020). Karena perbedaan densitas dalam Proterozoikum, Paleozoikum, dan Kenozoikum umumnya kecil, dan informasi tentang nilai densitas bawah permukaan tidak ada, keduanya dianggap sebagai bagian dalam inversi gayaberat. Artinya, model bawah permukaan untuk pemodelan gayaberat terdiri dari dua bagian yaitu :
1. Batuan dasar dengan densitas tinggi, yang meliputi Proterozoikum, Paleozoikum, dan Kenozoikum ; serta
2. Cekungan batuan sedimen densitas rendah
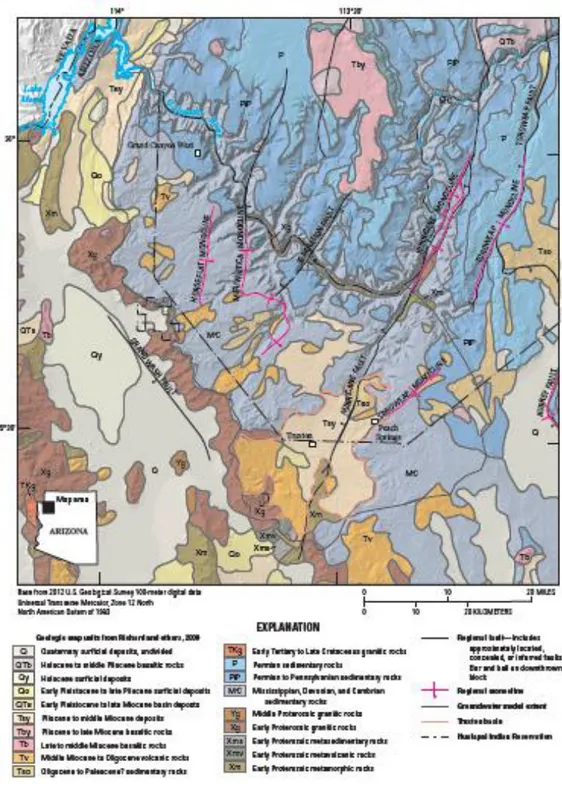
Berdasarkan interpetasi densitas batuan vulkanik, Kenozoikum Peach Spring termasuk dalam batuan Tuff dengan densitas rendah di negara bagian (Nielson, Lux, Dalrymple, & Glazner, 1990), terutama di bagian barat wilayah penelitian serta persebaran sesar daerah penelitian Gambar 2.3. Namun, berdasarkan pengukuran densitas batuan, batuan ini pada dasarnya tidak dapat dibedakan dari batuan asal pada cekungan dengan densitas rendah, dan diselingi dengan material cekungan.. Satuan vulkanik Kenozoikum lainnya, seperti batuan basalt di bagian Timur wilayah penelitian, memiliki densitas yang lebih tinggi dan tidak dapat dibedakan dengan batuan Paleozoikum dan Proterozoikum.
8
Gambar 2. 3 Peta Geologi dan Persebaran Sesar Daerah Penelitian (Kennedy, 2020)
2.4 Penelitian yang sudah pernah dilakukan
Cekungan Truxton adalah cekungan topografi kecil yang diisi dengan endapan Kuarter dan Tersier dan batuan vulkanik (tebalnya sekitar 480 meter di dekat Truxton, Arizona) yang melapisi batuan metamorf kristal Proterozoikum di barat atau batuan sedimen Kambrium di timur. Dataran Tinggi Hualapai adalah blok
9
besar batuan sedimen usia Paleozoikum yang dibelah oleh banyak jurang yang dalam. Sebagian besar drainase air permukaan di cekungan Truxton dan Dataran Tinggi Hualapai bersifat sementara dan hanya mengalir sebagai respon terhadap peristiwa curah hujan yang signifikan, tetapi beberapa drainase memiliki jangkauan yang didukung oleh pembuangan air tanah dari mata air. Cekungan sedimen Truxton membentuk akuifer Truxton, yang saat ini digunakan sebagai suplai air untuk komunitas Peach Springs, Arizona, dan memasok sejumlah kecil ternak dan sumur domestik. Air tanah yang dapat digunakan di Dataran Tinggi Hualapai berada di zona bantalan air bertengger di dekat permukaan tanah atau di akuifer Batu Kapur Muav pada kedalaman 600 meter di bawah permukaan tanah. Sampai saat ini, hanya dua sumur uji yang telah dibor melalui Batu Kapur Muav di Dataran Tinggi Hualapai, dan tidak satu pun dari sumur tersebut yang menemukan air di dalam batu kapur tersebut, hal ini menunjukkan bahwa unit tersebut tidak jenuh di semua area dataran tinggi (Mason, Bills, & Macy, 2020).
2.5 Konsep Dasar Metode Gayaberat 2.5.1 Hukum Newton
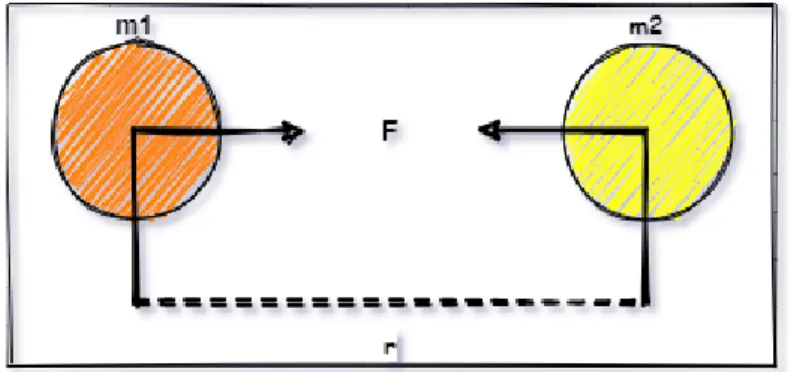
Teori gayaberat pertama kali dikemukakan oleh Sir Isaac Newton (1642 – 1727), yang menjelaskan perbandingan antara gaya tarik menarik antar dua patikel adalah sama dengan massa kedua benda tersebut (m1, m2) dan berbanding terbalik dengan
kuadrat jarak antara kedua pusat kedua massa tersebut (Telford, 1990). Teori tersebut merupakan dasar metode gayaberat Gambar 2.4.
Gambar 2. 4 Gaya tarik menarik antar dua partikel
𝐹 = 𝐺𝑚1.𝑚2
10
Pada Hukum II Newton dinyatakan bahwa gaya adalah perkalian massa dengan percepatannya, maka dapat ditulis persamaan :
𝐹 = 𝑚. 𝑎 (2.2)
Pada konsep gayaberat nilai 𝑎 (percepatan) dapat diganti dengan g (percepatan gayaberat bumi), sehingga dapat ditulis menjadi :
𝐹 = 𝑚. 𝑔 (2.3)
Apabila persamaan (2.1) (2.3) dihubungkan, maka akan didapatkan persamaan :
𝑔 = 𝐺𝑚1
𝑟2 (2.4)
Dimana :
F = Gaya tarik menarik antar dua benda (N) G = Konstanta gayaberat (6,67 x 10-11 Nm2/kg2) 𝑔 = Percepatan gravitasi
𝑚1 = Massa bumi (kg)
𝑚2 = Massa benda (kg)
𝑟2 = Jarak antar benda 1 dan 2 (m)
2.5.2 Koreksi Gayaberat
Pada pengolahan metode gayaberat akan muncul berbagai anomali-anomali yang merupakan target dan survei penelitian salah satu metode geofisika. Anomali tersebut memudahkan para peneliti untuk menafsirkan struktur geologi bumi. Anomali ini merupakan hasil yang diperoleh dari hasil densitas batuan satu dengan batuan lainnya. Anomali ini biasa disebut dengan Anomali Bouguer yang merupakan parameter penting dalam penelitian gayaberat (Purnomo, Koesuma, & Yunianto, 2013). Terdapat beberapa faktor utama yang mempengaruhi nilai anomali gayaberat yaitu faktor gaya tarik benda luar / pasang surut (tidal), kelelahan
11
alat pada saat akuisisi (apungan), posisi lintang, ketinggian, topografi, dan variasi densitas bawah permukaan. Oleh karena itu, diperlukan beberapa koreksi dalam mendapatkan hasil anomali gayaberat, berikut penjelasan tentang masing-masing koreksi anomali :
2.5.2.1 Koreksi Pasang Surut (Tide Correction)
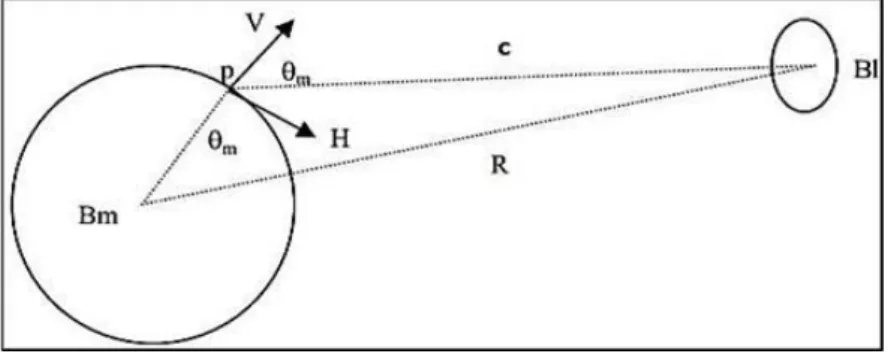
Koreksi tidal / pasang surut merupakan koreksi yang dilakukan untuk memperhitungkan pengaruh dari benda-benda langit seperti matahari, bulan, dan lain sebagainya (Telford, 1990). Penurunan efek tidal tersebut sebagian besar dapat menggunakan teori persamaan Longman (Longman, 1959) untuk penurunan efek tidal tersebut dan ilustrasi seperti pada Gambar 2.5.
𝑈𝑝= G(r) [( 𝑐 𝑅) 3 . (cos 2𝜃𝑚+ 1 3) + 1 𝑟 6 𝑐( 𝑐 𝑅) 4 . (5 cos 3𝜃𝑚+ 3 cos 𝜃𝑚)] (2.5) Dengan :
Up = potensial dititik P akibat pengaruh bulan 𝜃m = posisi lintang
Bl = bulan Bm = bumi
c = jarak rata-rata ke bulan r = jari-jari bumi ke titik P R = jarak dari pusat bumi ke bulan
12
Gambar 2. 5 Pengaruh gayaberat bulan pada titik P di permukaan (Kadir, 2000)
Dimana dalam praktiknya, koreksi tidal melakukan pengukuran dengan nilai gayaberat di stasiun (base) yang sama dengan interval waktu yang telah ditentukan. Kemudian hasil bacaan pada alat gravimeter tersebut diplot waktu untuk menghasilkan persamaan yang digunakan untuk menghitung koreksi tidal. Nilai gayaberat terkoreksi tersebut dapat dihitung dengan :
𝑔𝑡= 𝑔𝑟𝑒𝑎𝑑+ TC (2.6)
Dimana :
𝑔𝑡 = gayaberat terkoreksi tidal (mGal) 𝑔𝑟𝑒𝑎𝑑 = bacaan gayaberat pada alat (mGal)
TC = Tide Correction / koreksi tidal (mGal)
2.5.2.2 Koreksi Apungan (Drift Correction)
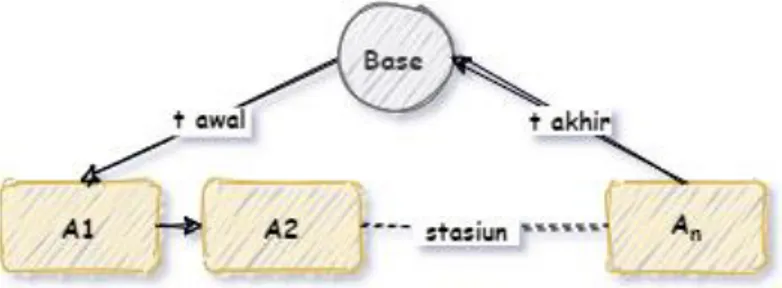
Koreksi Drift / apungan merupakan koreksi yang dilakukan karena adanya perbedaan harga bacaan alat pada suatu titik yang sama dengan waktu yang berbeda. Koreksi drift diasumsikan dengan persamaan linear dalam selang waktu (t) tertentu. Drift merupakan penyimpangan pembacaan nilai gravitasi. Beberapa faktor yang terjadi akibat penyimpangan tersebut misalnya elastisitas pegas pada alat, pemgaruh suhu lapangan dan goncangan yang terjadi saat survei. Semua alat gravimeter harus cukup peka untuk kepentingan prospektif geofisika secara komersial, sehingga tercapai variasi terhadap waktu. Hal tersebut yang menjadi faktor pengukuran perlu diadakan pengecekan kembali pada base station setelah dari lapangan guna mengatasi kesalahan pembacaan alat di awal dan akhir,
13
sehingga didapatkan perbedaan nilai awal dan akhir. Oleh karena itu, sistem pengukuran gayaberat dibuat secara tertutup (looping) Gambar 2.6.
Gambar 2. 6 Skema Pengukuran Gayaberat
Secara sistematis besarnya koreksi drift dirumuskan dalam :
𝐷𝐶 = 𝑔𝑎𝑘ℎ𝑖𝑟−𝑔𝑎𝑤𝑎𝑙
𝑡𝑎𝑘ℎ𝑖𝑟−𝑡𝑎𝑤𝑎𝑙 (𝑡𝑛− 𝑡𝑎𝑤𝑎𝑙) (2.7) Dimana :
𝐷𝐶 = Drift Correction di titik acuan pengamatan (mGal) 𝑔𝑎𝑘ℎ𝑖𝑟 = nilai gayaberat di stasiun akhir (mGal)
𝑔𝑎𝑤𝑎𝑙 = nilai gayaberat di stasiun awal (mGal) 𝑡𝑎𝑘ℎ𝑖𝑟 = waktu pengukuran gayaberat di stasiun ahir
𝑡𝑎𝑤𝑎𝑙 = waktu pengukuran gayaberat di stasiun awal 𝑡𝑛 = waktu pengukuran gayaberat di stasiun ke-n
2.5.2.3 Koreksi Lintang (Latitude Correction)
Koreksi lintang dilakukan karena adanya perbedaan nilai percepatan gravitasi di permukaan bumi yang disebabkan oleh bentuk bumi tidak sepenuhnya bulat sempurna melainkan spheroid. Nilai percepatan gravitasi di khatulistiwa berbeda dengan equator dikarenakan jari-jari di khatulistiwa lebih panjang. Dengan kata lain nilai percepatan pada setiap titik dipengaruhi oleh posisi lintang. Sesuai dengan Blakely (1995) (Blakely, 1995), nilai gayaberat secara teoritis dihitung dengan persamaan GRS (Geodetic Reference System) 1989 yaitu :
14 Dengan :
𝜑 = posisi lintang titik pengukuran
2.5.2.4 Koreksi Udara Bebas (Free Air Correction)
Free Air Correction merupakan koreksi akibat pengaruh efek topografi atau efek ketinggian terhadap spheroid referensi yang dapat mempengaruhi pembacaan nilai gayaberat tanpa melihat efek dari massa batuan. Perbedaan gayaberat yang diukur pada mean sea level (geoid) dengan gayaberat yang diukur pada ketinggian h meter dengan tidak ada batuan disekitarnya merupakan salah satu efek dari koreksi ini.
Nilai gayaberat pada mean sea level dengan menganggap bentuk bumi yang ideal, spheroid, tidak berotasi, dan massa terkonsentrasi pada pusatnya, dengan persamaan :
𝑔0 = 𝐺 𝑀
𝑅2 (2.9)
Namun, nilai gayaberat pada stasiun pengukuran dengan elevasi h (meter) dari mean sea level, sebagai berikut :
𝑔ℎ = 𝐺 𝑀
(𝑅+ℎ)2= 𝑔0+ ℎ
𝜕𝑔0
𝜕𝑅 (2.10)
Adapun besaran faktor udara bebas ( Free Air Correction) pada bidang equator adalah -0.3085, sehingga untuk mendapatkan nilai gayaberat terkoreksi udara bebas dapat menggunakan persamaan berikut :
𝐹𝐴𝐶 = 𝜕𝑔𝑓= 𝜕𝑔0 𝜕𝑅 ℎ = 𝜕(𝐺𝑀 𝑅2) 𝜕𝑅 ℎ = − 2𝐺𝑀 𝑅3 ℎ = − ( 2𝑔0 𝑅 ) ℎ = −0,3085. ℎ (2.11)
Dengan 𝑔0= 981785 mGal dan R=6371000 meter, sehingga besar anomali pada posisi tersebut menjadi :
15
𝐹𝐴𝐴 = 𝑔𝑜𝑏𝑠 − 𝑔𝜑+ 𝐹𝐴𝐶
(2.12)
Dimana :
h = elevasi stasiun pengukuran FAC = Free Air Correction FAA = Free Air Anomaly
𝑔𝑜𝑏𝑠 = nilai gayaberat observasi (mGal)
𝑔𝜑 = nilai gayaberat terkoreksi lintang (mGal)
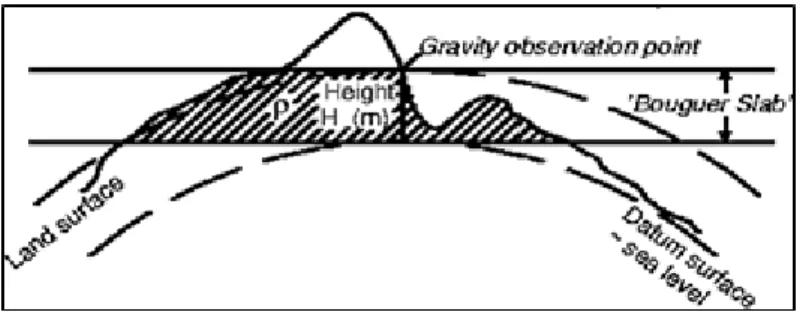
2.5.2.5 Koreksi Bouguer (Bouguer Correction)
Koreksi akibat suatu benda yang memiliki densitas diantara bidang referensi dan pengamatan, sehingga dilakukan pendekatan benda berupa slab dengan nilai tiitk pengukuran Gambar 2.7. Dengan kata lain, koreksi ini merupakan koreksi yang memprediksi efek massa bawah permukaan. Koreksi ini dapat dihitung dengan persamaan :
𝐵𝐶 = 0,04192𝜌ℎ (2.13)
Dengan :
𝜌 = estimasi densitas rata-rata (gr/cc) h = elevasi (m)
16
2.5.2.6 Koreksi Medan (Terrain Correction)
Kondisi topografi di sekitar titik pengukuran tidak beraturan selamanya, hal tersebut yang mempengaruhi nilai gayaberat. Sehingga diperlukan adanya pendekatan terhadap koreksi bouguer, dimana pada dasarnya permukaan bumi berundulasi dan menyebabkan adanya pengurangan terhadap nilai Simple Bouguer Anomaly. Namun, pada penggaplikasiannya koreksi ini mengacu pada efek topografi dan perbedaan elevasi di sekitar titik pengukuran, terdapat radius luar (Outer Zone) dan radius dalam (Inner Zone) pada koreksi ini, sehingga dapat ditulis:
𝑇𝐶 =2𝜋𝐺𝜌
𝑛 (𝑟𝐿− 𝑟𝐷)(√𝑟𝐿
2− 𝑧2) − (√𝑟
𝐷2− 𝑧2)mGal (2.14)
Dengan :
𝑟𝐿 = radius luar / Outer Zone (m) 𝑟𝐷= radius dalam / Inner Zone (m)
𝑧 = perbedaan elevasi rata-rata kompartemen n = jumlah segmen dalam zona tersebut
2.5.2.7 Anomali Bouguer
Anomali bouguer merupakan selisih hasil antara nilai gayaberat pengamatan dengan nilai gayaberat teoritis yang telah didapatkan dari seluruh koreksi yang telah dilakukan sebelumnya. Untuk memperoleh hasil Complete Bouguer Anomaly (CBA) koreksi medan harus ditambahkan dengan hasil Simple Bouguer Anomaly (SBA).
CBA = SBA + TC (2.15)
2.6 Analisis Spektrum
Analisis spektrum pada pengukuran metode gayaberat diindikasikan untuk mengukur estimasi lebar jendela (window) serta mengestimasi kedalaman anomali gayaberat berdasarkan frekuensi dan panjang gelombang. Dalam analisis spektrum digunakan Transformasi Fourier untuk mengubah fungsi dalam jarak atau waktu menjadi fungsi dalam bilangan gelombang frekuensi (Blakely, 1995). Analisis
17
spektrum diturunkan dari teori potensial gayaberat yang teramati pada suatu bidang horizontal menurut (Blakely, 1995) :
𝐹(𝑈) = 𝛾𝜇𝐹 (1 𝑟) dan 𝐹 ( 1 𝑟) = 2𝜋 𝑒|𝑘|(𝑧0−𝑧𝐼) |𝑘| (2.16) Dengan : 𝑈= potensial gayaberat 𝛾= konstanta gayaberat 𝜇= anomali densitas r = jarak z = kedalaman
sehingga menjadi persamaan :
𝐹(𝑈) = 2𝜋𝛾𝜇𝑒|𝑘|(𝑧|𝑘|0−𝑧𝐼) (2.17)
Berdasarkan persamaan diatas, transformasi fourier anomali gayaberat yang diamati pada bidang horizontal diberikan oleh :
𝐹(𝑔𝑧) = 𝛾𝜋𝐹 ( 𝜕 𝜕𝑧 1 𝑟) = 2𝜋𝛾𝜇𝑒 |𝑘|(𝑧 0− 𝑧𝐼) (2.18) Dengan : 𝑔𝑧= anomali gayaberat 𝑘 = bilangan gelombang 𝑧0= ketinggian titik amat 𝑧𝐼= kedalaman benda anomali
Jika bersifat random untuk distribusi densitasnya dan tidak ada korelasi antara masing-masing nilai gayaberat, maka 𝜇 = 1, sehingga hasil transformasi fourier anomali gayaberat menjadi :
18 Dengan :
A = amplitudo C = konstanta
Hasil transformasi diatas lalu di logaritmakan sehingga menghasilkan kurva antara ln A dan (k) yang linear.
ln 𝐴 = (𝑧0− 𝑧𝐼)|𝑘| (2.20)
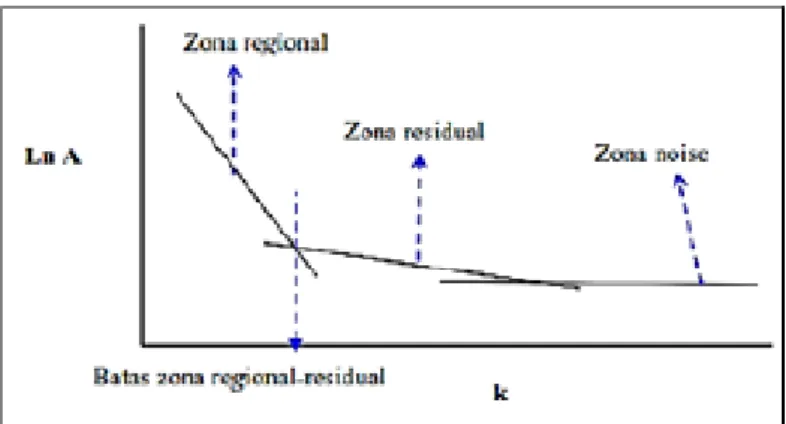
Hasil logaritma tersebut dapat menunjukkan kedalaman rata-rata bidang diskontinuitas rapat massa akan berbanding lurus dengan kemiringan grafik spektrum. Maka gradient pada setiap grafik analisis spektrum lintasan merupakan hasil estimasi kedalaman anomali window seperti Gambar 2.8. Hubungan panjang gelombang 𝜆 dengan k diperoleh dari persamaan (Blakely, 1995):
𝑘 =2𝜋
𝜆 atau 𝜆 = 2𝜋
𝑘 (2.21)
Sehingga perhitungan lebar window (n) menjadi :
𝜆 = 𝑛. Δ𝑥 atau 𝑛 = 2𝜋
𝑘𝑐.Δ𝑥 (2.22)
Keterangan:
𝑛 = lebar jendela
𝑘c = bilangan gelombang cut off (rad/m)
∆𝑥 = spasi grid (m)
19
Gambar 2. 8 Kurva pemisahan Zona Regional, Zona Resiual, dan Noise
Nilai f akan tinggi, jika nilai k semakin besar. Hubungan bilangan gelombang (k) dengan frekuensi (f) adalah k = 2𝜋𝑓, sehingga frekuensi rendah berasal dari sumber anomali regional dan frekuensi tinggi berasal dari sumber anomali residual.
2.7 Pemisahan Anomali Regional dan Residual
Ada beberapa metode yang sering dilakukan untuk melakukan pemisahan anomali regional dan residual. Namun, para peneliti banyak yang belum mempunyai pegangan untuk dijadikan suatu metode dalam perhitungannya. Sehingga, diperlukan suatu metode pemisahan anomali regional dan residual yang baik, agar didapatkan anomali residual yang akurat untuk pemodelan geologi bawah permukaan (Purnomo, Koesuma, & Yunianto, 2013). Pemisahan anomali regional dan residual dapat dilakukan dengan beberapa filter diantaranya :
2.7.1 Moving Average
Moving average dilakukan dengan cara merata-ratakan nilai anomalinya. Hasil dari perataan ini merupakan hasil dari anomali regional. Sedangkan untuk hasil residual didapatkan dengan cara mengurangkan hasil pengukuran gravitasi dengan nilai regional (Purnomo, Koesuma, & Yunianto, 2013) dengan penerapan seperti Gambar 2.9. Pada kasus 1D dijabarkan dengan persamaan sebagai berikut :
∆
𝑔𝑟=
∆𝑔(𝑖−𝑛)+⋯+∆𝑔(𝑖)+⋯+∆𝑔(𝑖+𝑛)20
Sedangkan untuk kasus 2D , diberikan kasus dengan :
∆
𝑔𝑟= 251[∆𝑔(𝐵1)+∆𝑔(𝐵2)+⋯+∆𝑔(𝐵25)] (2.24)
Gambar 2. 9 Penerapan Moving Average dengan lebar Window 5x5
2.7.2 Second Vertical Derivative (SVD)
Filter SVD digunakan untuk memunculkan efek dangkal dari pengaruh regionalnya (Setiadi, Setyanta, & Widijono, April 2010). Filter ini mampu menunjukkan diskontinuitas struktur bawah permukaan seperti sesar, cekungan, atau patahan maupun kontak batuan. SVD memiliki sifat high pass filter, dimana filter ini meninggikan nilai anomali dengan panjang gelombang yang pendek. SVD menjadi pertimbangan dalam pengolahan data gayaberat karena dalam beberapa kasus tidak memberikan keuntungan yang cukup jelas dari peta anomali Bouguer.
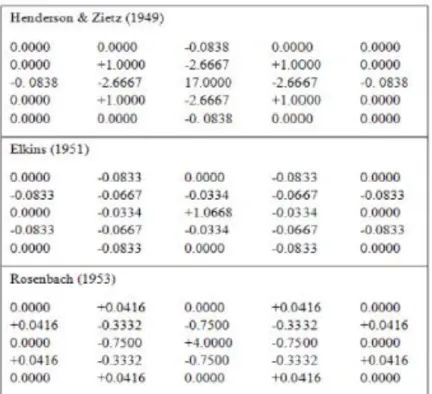
Beberapa operator filter SVD yang dapat digunakan seperti Gambar 2.10, menurut Handerzon dan Zeits (1949), Elkins (1951), dan Rosenbach (1953).
21
Gambar 2. 10 Operator Filter Second Vertical Derivative
Secara teoritis, metode ini menggunakan persamaan Laplace :
∇2∆𝑔= 0 (2.25) ∇2∆ 𝑔= 𝜕2(∆𝑔) 𝜕𝑥2 + 𝜕2(∆𝑔) 𝜕𝑦2 + 𝜕2(∆𝑔) 𝜕𝑧2 (2.26) Sehingga, 𝜕2(∆𝑔) 𝜕𝑥2 + 𝜕2(∆𝑔) 𝜕𝑦2 + 𝜕2(∆𝑔) 𝜕𝑧2 = 0 (2.27) 𝜕2(∆𝑔) 𝜕𝑧2 = − [ 𝜕2(∆𝑔) 𝜕𝑥2 + 𝜕2(∆𝑔) 𝜕𝑦2 ] (2.28)
Koefisien y pada penampang 1D mempunyai nilai yang tetap, sehingga persamaannya menjadi :
22 𝜕2(∆𝑔)
𝜕𝑧2 = − [
𝜕2(∆𝑔)
𝜕𝑥2 ] (2.29)
Dari persamaan diatas didapatkan bahwa SVD dari suatu anomali gayaberat sama dengan negatif dari derivative orde 2 horizontalnya, yang berarti bahwa SVD dapat melalui derivative orde 2, maka :
∆′′𝑔 = 𝑔𝑖−𝑔𝑖−1 ∆𝑥 − 𝑔𝑖+1−𝑔𝑖 ∆𝑦 ∆𝑥2 (2.30) Sehingga, ∆′′𝑔 = 𝑔𝑖+1−2𝑔𝑖+𝑔𝑖−1 ∆𝑥2 (2.31) 2.8 Forward Modeling
Forward Modeling adalah metode yang digunakan untuk melakukan proses interpretasi data gayaberat berupa suatu keadaan bawah permukaan dengan memperkirakan nilai densitas batuan. Dalam metode gayaberat, parameter suatu model adalah densitas batuan, jari-jari dan kedalaman bola dari permukaan bumi (geometri), sedangkan untuk respon suatu model dengan percepatan gravitasi yang ditimbulkan oleh gaya bola tersebut di permukaan bumi (Grandis, 2009). Untuk menghitung efek pada gayaberat model bawah permukaan dengan penampang berbentuk sembarang yang dapat mewakili oleh suatu poligon dengan n dinyatakan sebagai integral garis sepanjang sisi-sisi polygon yang terlihat pada Gambar 2.11 (Talwani, 1959).
Persamaan (Talwani, 1959) dalam komponen vertical dapat ditulis dengan persamaan :
23
Intergral garis dalam persamaan (2.34) dalam komponen vertikal 𝑔𝑧 dapat
dinyatakan dalam jumlah integral garis tiap sisinya, sehingga persamaannya dapat ditulis :
𝑔𝑧= 2𝑔𝜌 ∑𝑛𝑖=1𝑧𝑖 (2.35)
𝑧𝑖 diberikan pada persamaan :
𝑧𝑖 = 𝑎𝑖sin ∅𝑖cos ∅𝑖[(𝜃𝑖+ 𝜃𝑖+1) +
tan ∅𝑖. 𝑙𝑛 {
cos ∅𝑖(tan ∅𝑖− tan ∅𝑖)
cos ∅𝑖+1(tan ∅𝑖+1−tan ∅𝑖)}] (2.36)