1
PERANCANGAN DAN PEMBUATAN MAGNETOMETER DIGITAL DENGAN
SENSOR MAGNET HMC5883L BERBASIS WEB
DESIGN AND MANUFACTURE DIGITAL MAGNETOMETER WITH HMC5883L
MAGNETIC SENSOR WEB BASED
Rizky Ananda Putra
1), Drs. Agus Tri Sutanto, MT
2)1)
Taruna
Sekolah Tinggi Meteorologi Klimatologi Dan Geofisika, Tangerang Selatan 2)Kepala Jurusan Instrumentasi STMKG
Email : [email protected]
ABSTRAK
Pengamatan medan magnet di BMKG khususnya bidang geofisika bertujuan untuk kepentingan survey magnet dan mengetahui peta perubahan variasi medan magnet bumi. Untuk itu diperlukan alat pemantau medan magnet yang dapat bekerja secara otomatis merekam data pembacaan medan magnet untuk mempermudah pengamatan dan pengukuran medan magnet bumi. Pada penelitian ini, penulis merancang dan membuat sebuah magnetometer digital berbasis web. Instrumen ini terdiri atas perangkat keras dan perangkat lunak. Perangkat keras terdiri atas modul sensor HMC5883L, LM35, RTC DS1307, GPS, minimum sistem, I/O level converter, AVR ATmega16, PC dan LCD 20x4 untuk menampilkan data hasil pengukuran. Perangkat lunak terdiri dari CodeVision AVR yang diprogram menggunakan bahasa C dan LabVIEW.
Alat magnetometer hasil rancangan ini telah dikomparasi dengan magnetometer digital operasional yang telah dikalibrasi di Stasiun Geofisika Tangerang dengan hasil dapat mengukur arah dan besar medan magnet berupa keluaran variasi dari komponen X,Y dan Z dengan range -21.500 nT sampai 40.000 nT sesuai dengan kondisi kemagnetan di Stasiun Geofisika Tangerang, dimana data hasil pembacaan dari alat akan ditampilkan dan disimpan pada PC secara real time menggunakan aplikasi LabVIEW serta ditampilkan dalam bentuk web pada jaringan lokal sehingga dapat diakses oleh siapa saja dengan mudah oleh pengguna yang terhubung dengan jaringan lokal pada PC server tersebut.
Kata kunci : Medan magnet, magnetometer, sensor HMC5883L, LM35, LCD 20x4, Mikrokontroler ATmega16, LabVIEW.
ABSTRACT
BMKG magnetic field observations in the field of geophysics, especially aimed at the interests of the magnetic survey and determine the variation in Earth's magnetic field changes map. For accomplished this interest, automatically magnetic field monitoring instruments is needed to record magnetic data to facilitate magnetic field observations and magnetic field measurements.
In this study, author designed and created a web-based digital magnetometer. This instrument consists of hardware and software. The hardware consists of a sensor module HMC5883L, LM35, DS1307 RTC, GPS, minimum system, I/O level converter, AVR ATmega16, PC and 20X4 LCD to display the result of measurement data. The software consists of CodeVision AVR programmed using C language and LabVIEW.
This designed magnetometer instrument has been compared by digital magnetometer that has been calibrated in Geophysics Station of Tangerang. The result of this magnetometer can measure magnetic field direction and output of components X, Y and Z in the range about -21 500 nT to 40,000 nT in accordance with the conditions of magnetism in Geophysics Station of Tangerang. Result of data readings from the instrument will be displayed and stored on a PC in real time using
2 LABVIEW application and displayed in a web form on local network that can be accessed by users that easily connected to local network on PC server.
Keywords : magnetic fields, magnetometers, HMC5883L sensor, LM35, 20x4 LCD, Microcontroller ATmega16, LabVIEW
I. PENDAHULUAN
Medan magnet adalah salah satu besaran fisis yang sangat penting dan digunakan dalam berbagai bidang, misalnya dalam bidang geofisika, geologi, serta dalam berbagai bidang lainnya. Di BMKG khususnya bidang geofisika, pengamatan medan magnet bumi dilakukan untuk mengetahui peta variasi magnet bumi dan memetakan perubahannya dalam kurun waktu 5 tahun. Pemetaan medan magnet merupakan hasil dari penggambaran medan magnet dalam ruang.
Pada saat ini Badan Meteorologi, Klimatologi dan Geofisika (BMKG) melakukan pengamatan fenomena kemagnetan bumi di 5 stasiun, yaitu di stasiun Geofisika Tangerang (1964), stasiun Geofisika Tuntungan, Medan (1980), dan stasiun Geofisika Manado di Tondano (1990). Sedangkan 2 stasiun lainnya baru mulai operasi akhir tahun 2006, yaitu di Stasiun Geofisika Kupang dan dan Stasiun Geofisika Bandung di Pelabuhan Ratu.Selain melakukan pengamatan magnet bumi secara stasioner, BMKG juga melakukan pengamatan magnet bumi secara berkala di titik-titik tertentu yang disebut sebagai repeat stations, setiap 5 (lima) tahun sekali. Jumlah repeat station saat ini ada 53 titik. Peta medan magnet digunakan dalam eksplorasi geologi karena variasi dalam besar dan arah medan magnet bumi memberikan gambaran dari permukaan bumi bagian dalam. Peta medan magnet dibuat dengan mengukur pola medan magnet di sekitar permukaan bumi menggunakan sensor medan magnetik.
Untuk berbagai keperluan pemantauan dan penelitian yang berkaitan dengan medan magnet, dibutuhkan sebuah instrumen pengukur medan magnet yang akurat dan memiliki banyak kelebihan baikpada sisi kepraktisan, efisiensi, dimensi, catu daya yang rendah dan pencatatan nilai arah medan magnet secara realtime. Dalam penulisan ini, instrumen pengukur medan magnet tersebut akan diaplikasikan dalam pengukuran arah dan besar medan magnet dengan komponen X,Ydan Z.
Instrumen pengukur arah dan besar medan magnet memerlukan sensor magnet
sebagai bagian terdepan untuk memperoleh data medan magnet. Sensor terdiri dari berbagai jenis dengan karakteristiknya masing - masing. Salah satu jenis sensor untuk mengukur arah dan besar medan magnet adalah sensor magnet HMC5883L dimana sensor inimemiliki rentang pengukuran dari -8000 sampai 8000milliGauss yang sesuai untuk aplikasi pengukuran arah dan besar medan magnet suatu daerah tertentu.
Pada penulisan ini, mikrokontroler yang digunakan adalah mikrokontroler AVR ATmega16 produk Atmel yang dapat diprogram untuk melakukan pengambilan dan pengendalian data menggunakan bahasa C. Hasil pengukuran data ditampilkan secara real time menggunakan LCD 20x4 dan akan diakuisisi menggunakan program LabVIEW pada PC serta dapat diakses melalui web pada jaringan lokal. 1.1 PENGUKURAN MEDAN MAGNET
Sensor medan magnet dibagi menjadi dua berdasarkan kepekaan pengukuran dimana magnetometer lebih peka untuk mengukur medan rendah dan gausmeter lebih peka untuk mengukur medan tinggi. Pada pengukuran medan magnet rendah (magnetometer) terdapat dua tipe sensor yaitu tipe sensor berdasarkan komponen vektor dan sensor berdasarkan besaran skalar.
Gambar 1 Klasifikasi sensor medan magnet
Hubungan antara medan magnet dan tiap – tiap komponenya dapat dinyatakan melalui persamaan berikut :
3
Gambar 2 Komponen vektor medan magnet bumi
X = H cos D (1.1) Y = H sin D = X tan D (1.2) Z = F sin I = H tan I (1.3) D = arctan (Y/X) (1.4) I = arctan (Z/H) (1.5) F2 = X2 + Y2 + Z2 = H2 + Z2 (1.6) Dimana :
Intensitas vertikal (Z), yaitu besar medan magnet pada bidang vertikal
Intensitas arah (X), yaitu besar medan magnetik yang searah dengan utara sebenarnya
Intensitas arah (Y), yaitu besar medan magnetik yang searah dengan timur sebenarnya
Deklinasi (D), yaitu sudut antara utara sebenarnya (true north) dengan utara magnetik
Inklinasi (I), yaitu sudut antara medan magnetik total dengan bidang horizontal yang dihitung dari bidang horizontal menuju bidang vertikal ke bawah
Intensitas horizontal (H), yaitu besar medan magnetik pada bidang horizontal
Medan magnetik total (F) , yaitu besar dari vektor medan magnetik total. 1.2 PENGUKURAN SUHU
Suhu juga disebut temperatur, satuan internasional (SI) suhu adalah Kelvin (K) menurut International Temperature Scale-1990 (ITS-90) standar acuan fisikal suhu adalah titik tiga fasa air (triple point of water) dengan nilai TTPW= 273,16 K, sehingga satuan Kelvin adalah:
TPW
16
,
273
1
1
(1.7)Satuan lain suhu dan yang sering dipakai adalah derajat celcius (˚C) simbol yang dipakai
adalah t. Hubungan antara T dan t adalah:
C
273,15
-t
(1.8)II METODE PENELITIAN
Pada bab ini, akan dijelaskan seluruh perancangan sistem dari alat yang dirancang. Perancangan alat ini terdiri dari Blok diagram alat. Komponen alat yang digunakan, perancangan alat, flowcart alat, system kerja alat serta data yang ditampilkan
2.1 PERANCANGAN HARDWARE
Perancangan hardware menjelaskan mengenai blok diagram perancangan alat secara keseluruhan serta system antar muka hardware yang terdiri dari setiap komponen alat.
Blok Diagram
Berdasarkan blok diagram pada gambar dibawah, Sensor magnet HMC5883L berfungsi untuk mengukur arah dan besar medan magnet pada suatu daerah tertentu, selanjutnya sensor akan dihubungkan dengan I/O Level converter agar tegangan 5 VDC dari mikrokontroler diubah menjadi 3,3 VDC yang kemudian dihubungkan ke mikrokontroler ATmega16 bersama RTC DS1307 agar data yang diperoleh merupakan data yang real time melalui interface I2C. Selanjutnya mikrokontroler akan mengolah dan menampilkan data hasil pengukuran arah dan besar medan magnet serta waktu pada LCD 20x4 dan PC dalam bentuk grafik menggunakan program LABView.
Gambar 3 Blok Diagram Alat
Sistem Antarmuka Hardware
Sistem antarmuka yang digunakan pada alat ini adalah sebagai berikut:
4 Sensor HMC5883L dan RTC menggunakan
antarmuka komunikasi I2C, dimana Pin SCL sebagai sumber clock dan Pin SDA sebagai jalur untuk mengirim dan menerima. Sensor LM35 menggunakan ADC yang ada pada PORT A mikrokontroler dann GPS menggunakan USART serial sebagai media antarmukanya.
b. Antarmuka mikrokontroler komputer Alat ini menggunakan komunikasi USB to serial yang telah terdapat pada minimum sistem agar bisa berkomunikasi dengan komputer dan menampilkan data pada program LabVIEW.
Komponen Hardware dan Software
Komponen – komponen alat hardware maupun software yang digunakan pada penelitian ini adalah sebagai berikut
- Sensor Magnet HMC5883L
Sensor HMC5883L didesain untuk membaca besar medan magnet yang cocok untuk aplikasi yang memerlukan pengukuran medan magnet. Spesifikasi dari sensor ini memiliki tegangan kerja 3,3 VDC dengan tegangan maksimum 3,6 VDC serta konsumsi arus yang rendah (100 µA), Memiliki sensor magnetoresistive 3 sumbu yaitu X, Y, dan Z, memiliki jangkauan pembacaan medan magnet dari -8 sampai 8 Gauss dengan resolusi 5 milligauss, sensor ini menggunakan antarmuka I2C, memiliki Output rate maksimum sampai dengan 160 Hz (Single Measurement Mode) dan output rate 0,75 Hz s/d 75 Hz (Continuous Measurement Mode) serta telah dilengkapi ADC internal 12 bit sehingga output dari sensor telah berbentuk sinyal digital.
Gambar 4 Bentuk fisik Sensor magnet HMC5883L
- Sensor Suhu LM35
Sensor suhu LM35 Memiliki sensitivitas suhu dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius. Memiliki ketepatan atau akurasi kalibrasi, 0,5ºC pada suhu 25 ºC. Memiliki jangkauan maksimal operasi
suhu antara -55 ºC sampai +150 ºC. Dioperasikan tegangan 4 V – 30 V
Gambar 5 Bentuk fisik Sensor magnet HMC5883L
- I/O Level Converter
I/O Level Converter merupakan suatu modul yang dapat digunakan untuk mengubah level tegangan I/O 5V menjadi 3,3V. Modul ini dapat diaplikasikan untuk antarmuka antara modul mikrokontroler bertegangan I/O 5V dengan modul sensor digital atau modul digital lain yang bertegangan I/O 3,3V.
Gambar 6 Bentuk fisik I/O Level Converter
- Mikrokontroler
Pada perancangan alat ini minimum sistem mikrokontroler yang digunakan adalah DI-Super Smart AVR.16 yang dipilih berdasarkan kebutuhan sistem yang dibangun serta pertimbangan biaya yang minimal.
Gambar 7 Bentuk fisik minimum sistem ATmega16
- RTC (Real Time Clock)
RTC (real time clock) biasanya berupa sebuah IC yg mempunyai clock sumber sendiri dan internal batery untuk menyimpan data waktu dan tanggal. Sehingga jika sistem komputer atau microcontroller mati, waktu dan tanggal didalam memori RTC tetap uptodate.
5 - Neo GPS Starter Kit
Spesifikasi dari Neo GPS Starter Kit adalah sebagai berikut :
a.
Berbasis SIM18, modul GPS Receiver 48 channel dengan protokol keluaran SiRF OSP& NMEA.b.
Tersedia pilihan antarmuka: USB (virtual COM port), UART TTL, atau I2C.c.
Tegangan input catu daya 5 VDC, dilengkapi dengan regulator tegangan1,8 VDC.Gambar 9 Bentuk fisik Neo GPS Starter Kit - LCD (Liquid Cristal Display)
LCD yang dipakai pada sistem ini adalah LCD 20x4 dengan jumlah karakter yang dapat ditampilkan adalah 80 karakter dalam 20 kolom x 4 baris. LCD ini dipilih karena harga yang cukup ekonomis dengan jumlah karakter yang sangat sesuai dengan keluaran hasil pengukuran. LCD ini dapat menampilkan keluaran data sensor magnet HMC5883L, Suhu dan Waktu sekaligus dalam satu tampilan.
Gambar 10 LCD 20x4
- CodeVision AVR
CodeVision AVR merupakan sebuah software yang digunakan untuk memprogram mikrokontroler. Mikrokontroler dapat berfungsi jika telah diisi sebuah program, pengisian program ini dapat dilakukan menggunakan compiler yang selanjutnya diprogram ke dalam mikrokontroler menggunakan fasilitas yang sudah di sediakan oleh program tersebut. Salah satu compiler program yang umum digunakan sekarang ini adalah CodeVision AVR yang menggunakan bahasa pemrograman C.
- LabVIEW
LabVIEW adalah suatu bahasa pemrograman berbasis grafis yang menggunakan icon sebagai ganti bentuk teks
untuk menciptakan aplikasi. Berlawanan dengan bahasa pemrograman berbasis text, di mana instruksi menentukan pelaksanaan program, Labview menggunakan pemrograman dataflow, yang mana alur data menentukan pelaksanaan (execution). Tampilan pada Labview menirukan instrument secara virtual.
2.2 PERANCANGAN SOFTWARE
Software atau perangkat lunak yang digunakan adalah pemrograman CodeVison AVR dan LabVIEW. Dengan menggunakan program ini maka mikrokontroler dapat membaca dan menampilkan data hasil pengukuran arah dan besar medan magnet ke LCD 20x4 dan PC secara real time. Perancangan software terdiri dari perancangan program mikrokontroler AVR ATMega 16 dan Perancangan aplikasi LabVIEW.
Diagram Alir program Mikrokontroler AVR ATMega 16
Pada Diagram alir ini akan dibahas mengenai alur dari program mikrokontroler AVR ATMega 16 yang digunakan untuk perancangan alat ukur medan magnet.
Gambar 11 Diagram Alir Program Mikrokontroler
Penjelasan Diagram alir diatas adalah sebagai berikut :
6 1. Awal dari suatu program.
2. Melakukan inisialisasi I2C, USART dan LCD pada library pemrograman Code Vision AVR. 3. Baca data yang diperoleh dari
sensor Magnet dan GPS.
4. Proses pengolahan data pada mikrokontroler .
5. Apakah nilai arah dan besar medan magnet dalam sumbu (X, Y, Z), suhu serta waktu yang dihasilkan dari program mikrokontroler telah tersedia.
6. Apabila data yang dikeluarkan sudah tersedia maka output pengukuran dari sensor HMC5883L, LM35 dan GPS akan ditampilan pada LCD 20x4 dan PC Melalui USB to serial yang akan di tampilkan dalam grafik menggunakan program LabVIEW dan Web dimana program akan melakukan pengulangan atau looping secara terus menerus. Kemudian program berakhir. Diagram Alir Aplikasi LabVIEW
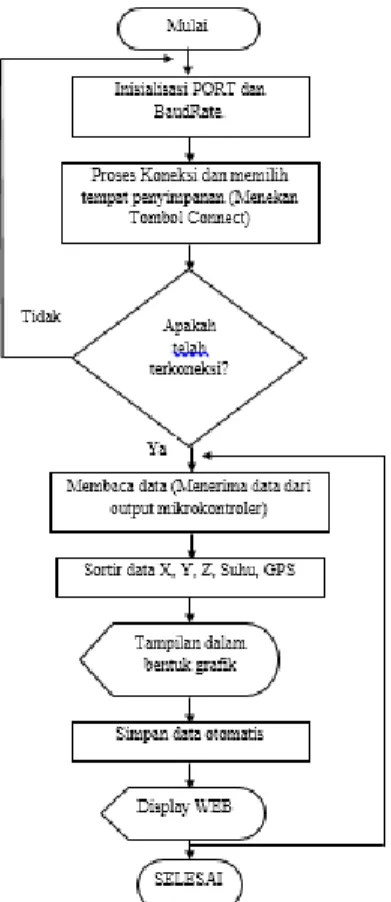
Gambar 12 Diagram Alir Aplikasi LabVIEW
Penjelasan Diagram alir diatas adalah sebagai berikut :
1. Awal dari suatu program.
2. Melakukan inisialisasi komunikasi serial UART yaitu pada baudrate 9600 bps. Dan inisialisasi PORT sesuai nomor PORT yang terdeteksi pada PC.
3. Proses menekan tombol connect atau start untuk memulai program dan pemilihan lokasi penyimpanan data dalam file .txt.
4. Proses menerima output dari mikrokontroler.
5. Proses mensortir data yang didapat dari mikrokontroler yang berupa data X, Y, Z dan suhu.
6. Data akan ditampilkan dalam bentuk grafik.
7. Data akan disimpan di tempat yang telah dipilih dalambentuk file .txt 8. Akan ditampilkan pada web dengan
memasukkan URL pada browser. 9. Selesai.
Perancangan Tampilan Web
Pada perancangan tampilan web, penulis menggunakan tools yang telah tersedia pada software LabVIEW. Penulis menggunakan “web published tool” yang akan digunakan untuk memonitoring data yang terdapat dalam program LabVIEW ke dalam web dengan jaringan localhost. Tampilan pada web akan muncul dengan cara mengetikkan URL (Uniform Resource Locator) yang telah diberikan oleh LabVIEW pada browser yang dimiliki maka web akan menampilkan data yang sama dengan data yang tampil pada PC server.
2.3 HASIL RANCANGAN ALAT
Pada dasarnya prinsip kerja dari alat ini adalah sebagai alat pengukur arah dan besar medan magnet dengan keluaran variasi nilai X, Y, dan Z yang didapatkan dari perubahan resistansi AMR (Anisotropic Magnetoresistance). Alat ini dapat digunakan pada range pengukuran -8000 s/d 8000 milliGauss sesuai dengan spesifikasi sensor dalam datasheet, Sebelum masuk ke mikrokontroler, sensor akan dihubungkan dengan I/O level converter agar tegangan input yang didapat sensor hanya 3,3 VDC sesuai
7 karakteristik sensor yang dapat bekerja pada
tegangan maksimum 3,6 VDC kemudian output analog dari sensor magnet HMC5883L dan RTC akan diolah oleh ADC internal yang terdapat pada sensor. Data dari sensor HMC5883L dan RTC akan diambil melalui Port C ( PC.0 – PC.7) yang dihubungkan dengan sensor menggunakan sistem interface I2C dimana SDA (serial data) dari sensor magnet HMC5883L akan disampbungkan pada PC.5 dan SCL (serial clock) akan disambungkan pada PC.4. Untuk data suhu dari LM35 akan disambungkan pada (PA.0) dan GPS akan disambungkan menggunakan USART serial ke PC. Sedangkan data masukan untuk tampilan LCD dikeluarkan melalui Port B ( PB.0 – PB.7). Untuk komunikasi ke PC, menggunakan sistem USB to serial yang sudah terdapat pada minimum sistem yang kemudian dihubungkan ke dalam PC dengan software aplikasi yang telah dibuat menggunakan program LabVIEW dan dapat ditampilkan dalam bentuk web menggunakan tools yang terdapat dalam LabVIEW. Diharapkan data yang ditampilkan pada PC dan disimpan pada memory PC merupakan data hasil pengukuran arah besar medan magnet dan suhu yang realtime.
Gambar 13 Bentuk fisik alat secara keseluruhan
2.4 TAMPILAN DATA Tampilan pada LCD
Data yang akan ditampilkan pada LCD 20x4 adalah data arah dan besar medan magnet dimana:
Baris ke 1 menampilkan Sumbu X yaitu besar medan magnetik yang searah dengan utara sebenarnya dengan satuan nanoTesla.
Baris ke 2 menampilkan Sumbu Y yaitu besar medan magnetik yang searah dengan timur sebenarnya dengan satuan nanoTesla.
Baris ke 3 menampilkan Sumbu Z yaitu besar medan magnetik pada bidang vertikal dengan satuan nanoTesla.
Baris ke 4 menampilkan SUHU dan Tanggal.
Gambar 14 Bentuk tampilan pada LCD 20x4
Tampilan pada web locahost
Tampilan pada web dengan jaringan lokal yang dibuat merupakan tampilan monitoring dari program akuisisi LabVIEW pada PC. Pengguna dapat melakukan monitoring dan mengakses data dari web tersebut secara real time asalkan di PC tersebut juga terinstal LabVIEW dan terhubung jaringan local dengan PC yang sebagai server.
Gambar 15 Bentuk tampilan pada web menggunakan internet explorer
Tampilan pada PC
Tampilan sistem akuisisi data pada PC menampilkan grafik dari sumbu X, Y dan Z yang didapat dari output pegukuran arah dan besar medan magnet oleh sensor magnet HMC5883L dalam satuan nT beserta nilai komponen lainnya yang berupa nilai dari komponen H, F, Inklinasi
8 dan Deklinas yang didapat dari rumus yang
dirancang dalam program LabVIEW serta tampilan data suhu yang didapat dari sensor LM35.
Gambar 16 Bentuk tampilan program LabVIEW pada PC
III HASIL DAN PEMBAHASAN
Setelah alat rancangan selesai dirancang, maka selanjutnya alat rancangan dilakukan validasi dan pengujian. Pengujian ini dibagi menjadi pengujian sensor dan pengujian kinerja grafik interface beserta kinerja seluruh sistem yang dirancang.
3.1 PENGUJIAN SENSOR MAGNET DAN SUHU
Alat dan Bahan
Dalam proses komparasi untuk nilai medan magnet dan suhu dibutuhkan beberapa alat sebagai berikut:
1. Magnetometer operasional merk LEMI-018.
2. Thermometer chamber dan alat kalirator suhu standart merk fluke tipe 1502a. 3. Alat magnetometer digital hasil rancangan. 4. PC sebagai tampilan grafik, penyimpanan
data dan tampilan web.
5. Catu daya untuk PC dan data logger. Waktu pengujian
Komparasi yang bertujuan untuk mengetahui kedekatan nilai dari alat magnetometer digital yang dirancang dengan alat magnetometer operasional yang telah dikalibrasi ini dilakukan pada :
Hari/tanggal : Sabtu s/d Minggu / 04 s/d 05Juni 2015
Waktu : 00:00 s/d 23.59 UTC.
Tempat : Stasiun Geofisika Tangerang BMKG
Untuk proses kalibrasi nilai keluaran dari sensor suhu dengan alat kalibrator suhu dilakukan pada :
Hari/tanggal : Senin, 3 Juli 2015
Waktu : 15:00 s/d 18.00 UTC.
Tempat : BBMKG Wilayah II
Ciputat. Metode Pengujian
Komparasi pada data medan magnet
dilakukan dengan cara meletakkan alat
magnetometer digital hasil rancangan
bersebelahan
dengan
alat
operasional
magnetometer stasiun geofisika Tangerang
yang dipasang di dalam ruangan khusus dan
jauh dari aktivitas manusia. Setelah sejajar,
atur penanda utara yang ditunjukkan oleh
arah panah yang telah terpasang pada sensor
magnetometer digital hasil rancangan searah
dengan penanda utara pada alat operasional
yang ditunjukkan dengan arah panah,
sambungkan logger dengan PC melalui USB
TTL serial yang terdapat pada minimum
sistem agar dapat menampilkan data dalam
bentuk
grafik
maupun numerik
dan
menyimpan data dalam PC secara otomatis.
Pada proses komparasi ini dilakukan
konversi satuan dari mG (milliGauss)
menjadi nT (nanoTesla) dengan mengalikan
hasil keluaran dari alat yang dirancang
dengan 99,99 agar data yang diperoleh dari
alat yang dirancang dengan alat operasional
memiliki nilai satuan yang sama yaitu nT
(nanoTesla) dan sama – sama memiliki nilai
2 satuan dibelakang koma.
Gambar 17 Proses komparasi magnetometer digital di Stasiun Geofisika Tangerang
9 Kalibrasi pada data sensor suhu
dilakukan dengan cara mengkalibrasi nilai keluaran pada suhu LM35 yang dipakai dalam rancangan dengan kalibrator suhu yang terdapat pada kantor BBMKG II Ciputat. Sensor suhu LM35 dimasukkan di dalam thermometer chamber dan akan dilakukan kalibrasi dengan menyeting pointnya di nilai 10oC, 20oC, 30oC,
40oC.
Gambar 18 Proses kalibrasi sensor suhu di Lab. Kalibrasi BBMKG Wil 2 Ciputat
Website akan diuji coba dengan cara menempatkan 2 buah PC yang terhubung pada satu jaringan yang sama atau jaringan lokal dan sama – sama telah diinstal dengan program LABView 2011, kemudian kedua PC tersebut akan membuka URL yang sama dan akan dilihat tampilan antara PC 1 dan PC 2 apakah sama atau tidak.
Gambar 19 Proses uji coba website pada jaringan lokal
3.2 HASIL PEMBACAAN Hasil Komparasi Sensor magnet
Tabel 1 Perbandigan nilai X, Y dan Z (nT) pada alat magnetometer hasil rancangan dengan alat
operasional LEMi - 18
Hasil Kalibrasi Sensor Suhu
Tabel 2 Komparasi nilai suhu (oC) pada alat
magnetometer digital hasil rancangan dengan alat suhu standart merk fluke tipe 502a
Hasil data yang diperoleh akan dianalisis menggunakan metode analisis standar deviasi. Analisis standar deviasi seringkali digunakan dalam pengumpulan data untuk mengetahui seberapa besar tingkat kesalahan atau error. Semakin kecil standar deviasi maka data tersebut semakin bagus daripada data yang memiliki standar deviasi yang besar. Nilai dispersi juga dapat dilihat dari standar deviasi. Jika nilai standar deviasi kecil hal ini berarti nilai-nilai data berkisar mendekati rata-rata, semakin besar nilai standar deviasi maka nilai data tersebar semakin jauh dari nilai rata-ratanya.
10 Rumus umum yang digunakan untuk
menghitung standar deviasi adalah sebagai berikut : S = √∑ (𝒀𝒊−Ῡ)𝟐 𝒏 𝒊=𝟏 𝒏 (3.1) dimana
Yi : data alat ke-n
Y : rata-rata data alat keseluruhan n : banyaknya data yang diambil 3.3 Hasil Analisa
Data hasil komparasi dari alat magnetometer digital hasil rancangan menunjukkan bahwa nilai pada sumbu X, Y dan Z sudah mendekati nilai yang ditunjukkan oleh alat operasional merk LEMI-18 yang telah terkalibrasi walaupun perbedaan data masih diatas 100 nT namun perubahannya cukup linear. Data yang dikeluarkan masih tidak stabil dan sangat mudah berubah-ubah yang disebabkan karena data dari alat magnetometer digital hasil rancangan hanya dapat melakukan perubahan angka diatas bilangan ratusan. Hal ini sesuai dengan spesifikasi yang dimiliki oleh sensor dimana resolusi sensor adalah 1 mG dan range pengukuran hanya dalam rentang satuan mG (milliGauss) serta sistem akuisisi data yang diprogram untuk mengalikan nilai 100 pada setiap data yang dikeluarkan oleh sensor sehingga perubahan nilainya terlihat sangat besar.
- Analisis Data Sumbu X
Melalui hasil perhitungan standar deviasi yang didapat pada tabel 4.1 diatas, diperoleh standar deviasi untuk data sumbu X yang terukur dari alat magnetometer digital hasil rancangan adalah sebesar 98,06180008 Nilai standar deviasi ini menunjukkan bahwa data terdistribusi di sekitar rata-rata.
Gambar 20 Perbandingan nila rata-rata medan magnet pada sumbu X (nT)
- Analisis Data Sumbu Y
Melalui hasil perhitungan standar deviasi yang didapat pada tabel 4.1 diatas, diperoleh standar deviasi untuk data sumbu Y yang terukur dari alat magnetometer digital hasil rancangan adalah sebesar 8,08916974 Nilai standar deviasi ini menunjukkan bahwa data terdistribusi di sekitar rata-rata.
Gambar 21 Perbandingan nila rata-rata medan magnet pada sumbu X (nT)
- Analisis Data Sumbu Z
Melalui hasil perhitungan standar deviasi yang didapat pada tabel 4.1 diatas, diperoleh standar deviasi untuk data sumbu Y yang terukur dari alat magnetometer digital hasil rancangan adalah sebesar 122,752975 Nilai standar deviasi ini menunjukkan bahwa data tersebar cukup jauh dari nilai rata-ratanya. Hal ini bisa disebabkan oleh beberapa hal baik internal dari sensor maupun eksternal seperti kondisi lingkungan dan gangguan dari luar, penulis menduga hal ini dikarenakan memang sensor magnet yang dipakai pada alat magnetometer digital hasil rancangan memiliki spesifikasi yang masih jauh dibawah dari alat operasional yang digunakan pada stasiun geofisika Tangerang.
Gambar 22 Perbandingan nila rata-rata medan magnet pada sumbu X (nT)
11 - Analisis Data Suhu
Dari data hasil kalibrasi yang ditunjukkan oleh tabel 4.2, diperoleh nilai koreksi, standar deviasi dan ketidakpastian dari sensor suhu LM35 yang digunakan pada alat magnetometer digital yang dirancang. secara umum nilai yang didapatkan masih cukup liner dan hubungan data suhu pada alat standar dan LM35 pada alat hasil rancangan tidak terlalu jauh. Dikarenakan parameter suhu bukanlah parameter utama yang menjadi pembahasan pokok pada penelitian ini, maka sensor suhu LM35 masih dikatakan cukup layak untuk digunakan dalam alat yang dirancang.
Gambar 23 Grafik suhu antara alat standar dengan alat hasil rancangan
- Tampilan Website
Melalui proses uji coba diatas, website dapat berjalan dengan baik pada PC yang terhubung jaringan intranet (jaringan lokal) dengan PC server. Hal ini otomatis dapat diterapkan pada setiap PC di kantor yang terhubung dengan PC server asalkan PC tersebut telah terinstall program LabVIEW dengan versi yang sama dengan program LabVIEW yang digunakan pada PC server. Tampilan website telah mencangkup seluruh informasi tentang nilai medan magnet, tampilan telah berubah otomatis mengikuti perubahan data yang didapat dari sensor secara realtime, susunan grafik, teks, dan pewarnaan sudah cukup baik dan tampilan pada web cukup mudah untuk dibaca dan dipahami.
IV KESIMPULAN DAN SARAN KESIMPULAN
Setelah menyelesaikan penelitian, penulis dapat mengambil kesimpulan sebagai berikut :
Telah dibuat sebuah alat bernama “Magnetometer Digital Berbasis Web” yang berfungsi untuk mengukur arah dan besar medan magnet secara real time berbasis web.
Alat dapat digunakan untuk mengukur arah dan besar medan magnet pada sumbu X, Y danZ dengan range -22.500 nT sampai 40.000 nT sesuai dengan kondisi kemagnetan di Stasiun Geofisika Tangerang.
Data yang dihasilkan dari alat ditampilkan pada LCD 20x4 dan monitor PC dalam bentuk grafik, serta dapat disimpan dalam format file .txt untuk mempermudah proses pengolahan data.
Tampilan data pada program LabVIEW dapat dilihat dan di monitoring menggunakan web pada jaringan lokal. SARAN
Untuk pengembangan dan
penyempurnaan alat lebih lanjut, diperlukan beberapa hal sebagai berikut :
Dibutuhkan sebuah sensor yang mampu mengukur arah dan besar medan magnet dengan range pengukuran dalam satuan nT dan tingkat resolusi yang lebih tinggi dari sensor yang dipakai pada penelitian ini agar mendapatkan data yang lebih akurat.
Diperlukan kalibrasi awal terhadap modul sensor agar mengetahui tingkat keakuratan maupun tingkat kepercayaan terhadap nilai yang dikeluarkan oleh modul sensor tersebut.
Dalam proses komparasi data medan magnet antara alat hasil rancangan dan alat operasional perlu untuk memperhatikan aspek noise yang dapat mempengaruhi nilai yang diperoleh.
Sistem tampilan web diharapkan dapat ditampilkan dalam jaringan publik dengan tampilan yang lebih inovatif dan menarik sehingga dapat dilihat oleh semua user dimanapun yang memiliki akses internet.
12 V DAFTAR PUSTAKA
Buku
[1]Andrianto, Heri. 2013 Program mikrokontroler AVR ATmega16 menggunakan bahasa C edisi revisi, Informatika. Bandung.
[2]Winoto, Ardi. 2010. Mikrokontroler AVR ATmega8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR, Informatika, Bandung.
[3]Husni, M. 2012. Magnet bumi dan listrik udara, Akademi Meteorologi, Klimatologi dan Geofisika, Jakarta. [4]Yusuf, Erwin. 2012. Pengukuran &
instrumentasi pada sistem tenaga ep6071 pengukuran medan magnet, Sekolah Teknik Elektro dan Informatika,Institut Teknologi Bandung.
Makalah seminar, lokakarya
[5]Djamal, Mitra. 2006. Pengukuran Medan Magnet Lemah Menggunakan Sensor Magnetik Fluxgate dengan Satu Koil Pick-Up, Institut Teknologi Bandung, Bandung.
[6]Artanto, Dian. 2012. Interaksi Arduino dan LabVIEW, Elex Media Komputindo, Jakarta.
[7]Putra, Rizky A. Sutanto, Agus T, 2014. Prototipe magnetometer digital dengan sensor magnet HMC5883L berbasis mikrokontroler ATMega16. Jurnal DINAMIKA, edisi VII-Vol.2 (ISSN-14100487), Akademi Meteorologi dan Geofisika. Jakarta
Artikel dari internet:
[8]Dallas-Maxim Semiconductor. (DS1307 64 x 8, Serial, I2C Real-Time Clock. http://datasheets.maxim-ic.com/en/ds/DS1307.pdf. Diakses tanggal 7 Maret 2014) [9]Honeywell, 2013. (datasheet HMC5883L http://www.adafruit.com/datasheets/ HMC5883L_3-Axis_Digital_Compass_IC.pdf Diakses pada tanggal 11 Maret 2013) [10]Tutorials, Embedded. 2010. (TutoriaI I2C
interface.
http://www.embeddedtutorials.com/t wo-wire-interface/ . Diakses pada tanggal 11 Maret 2015).