APIKASI FUZZY PIPD PADA PENGENDALI WICKET GATE
PADA PEMBANGKIT LISTRIK TENAGA MYCRO HYDRO
Muh Budi R Widodo 1, Soedibyo, Ali musyafa, dan Imam Robandi
Dept. Electrical engineering Institut Technology sepulug Nopember
Sukolilo, surabaya, 60111
Abstrak
Perkembangan teknologi pengendali pada pembangkit listrik tenaga microhydro pada saat ini semakin meningkat. Pembangkit microhydro sangat diminati karena memiliki kelebihan secara teknis dan ekonomis, hal ini disebabkan microhydro adalah pembangkit listrik tenaga air skala kecil yang tidak memerlukan instalasi penyimpanan air yang luas, selain itu juga ramah lingkungan. Permasalahan yang sering terjadi pada sistem pembangkit microhydro adalah terjadinya putaran tidak konstan yang disebabkan oleh debit air maupun perubahan muka air (diversion) serta perubahan beban sehingga mengakibatkan perubahan pada frekwensi sistem. Fluktuasi frekuensi ini akan mempengaruhi pada kestabilan sistem, oleh sebab itu dalam penelitian ini akan dibahas sebuah strategi pengendali frekuensi dengan melakukan simulasi menggunakan MATLAB. Pada simulasi dibandingkan perfomansi frekuensi sistem microhydro yang dikontrol menggunakan Fuzzy PI Controller dengan Fuzzy PIPD Controller. Hasil simulasi menunjukkan bahwa dengan penggunaan Fuzzy PIPD controller performasi frekuensi sistem yang diberi gangguan berupa perubahan beban mampu ditingkatkan, yaitu overshoot dan settling time 0 p.u , 4.365 detik pada perubahan beban 0.015 p.u, 0.0001 p.u , 4.595 detik untuk perubahan beban 0.025 p.u, dan 0.0001 p.u , 4.744 detik dengan perubahan beban sebesar 0.05 p.u.
Kata kunci : Micro Hydro, Wicket Gate, Fuzzy PI Controller , Fuzzy PIPD Controller.
1.
Pendahuluan
Micro hydro adalah pembangkit listrik tenaga air skala kecil yang tidak memerlukan instalasi
penyimpanan air yang luas, sehingga tidak membutuhkan banyak lahan [1]. Selain itu microhydro
merupakan energi terbarukan yang ramah lingkungan dan murah [1,2]. Pada microhydro konvensional,
output dari generator diatur oleh wicket gate yang bertugas mengatur jumlah air yang mengalir ke turbin.
Proses pengaturan wicket gate ini telah banyak dikembangkan dengan menggunakan debit air atau
tegangan sebagai input dan sudut pembukaan katup sebagai aksi kontrol untuk mendapatkan output generator yang diinginkan [2,3]. Pembangkit dengan kontrol konvensional tersebut mempunyai kele-mahan pada pengendalian tegangan dan frekuensi karena kondisi debit air yang tidak kontinyu serta adanya perubahan beban [3,4]. Perubahan beban dan debit air berkaitan erat dengan stabilitas sistem secara keseluruhan.
Banyak penelitian telah dilakukan untuk mendesain kontrol handal dan cerdas sehingga mampu menjaga performansi tegangan dan frekuensi sistem supaya tetap dalam batas simpangan yang diijinkan [6,7]. Kontrol proporsioanal integral (PI) dan Proportional Differential (PD) masih dipercaya dan banyak digunakan pada proses otomasi dan kontrol pada industri [6,8]. Alasan utama digunakan kontrol PI dan PD adalah karena mudah dioperasikan, desain tidak teralu rumit, dan sangat efektif dipakai pada berbagai mesin [6,7,8]. Pada sistem yang amat kompleks kotroler jenis PI dan PD mengalami kendala dalam
penentuan gain penguatan Ki dan Kd, oleh karena itu sering kali kontroler jenis ini digabung dengan fuzzy
atau metode optimisasi lain misalnya, GA atau PSO [8,9].
Fuzzy Logic telah dikenal sebagai metode yang handal untuk membangun kontroler sistem dan telah teruji mampu memperbaiki performansi sistem [10]. Penggunaan fuzzy yang mudah dan tidak memerlukan persamaan matematis dalam menyelesaikan permasalah menjadikan fuzzy ini sangat di
gemari di kalangan peneliti [8,9,10]. Metode-metode perancangan Fuzzy Logic Controller (FLC)
merepresentasikan cara kerja manusia [10]. Ide dari fuzzy set ini berguna untuk mewakili permasalahan linguistik numerik dan membuat keputusan yang handal dari ketidakjelasan dan ketidaktepatan suatu kasus [7,8,9,10].
Pada penelitian ini, dibahas sebuah strategi pengendalian optimal mengunakan fuzzy PIPD yangmerupakan modifikasi dari PID controller yang dihybrid dengan fuzzy. Kontroller PIPD ini akan digunakan untuk mengendalikan frekuensi sistem akibat perubahan beban supaya sistem tetap stabil dengan cara mengatur debit air yang masuk ke turbinmelalui wicket gate. Perancangan model sistem pembangkit listrik, dilakukan dengan memodelkan secara liner pada turbin air dan generator menggunakan Simulink MATLAB. Pemodelan matematika ini diharapakan dapat meniru perilaku sistem nyata dan digunakan untuk melihat perilaku dinamik sistem secara keseluruhan, sehingga aplikasi dari kontroler dapat dilihat dengan jelas.
2.
Pembangkit ListrikMicrohydroPLTA skala kecil maupun besar jika ditinjau dari segi cara membendung air terdapat 2 macam, yaitu
: jenis run of river dan jenis reservoir. Pada PLTA jenis run of river, air sungai dialihkan dengan
menggunakan dam yang dibangun memotong aliran sungai. Air sungai kemudian disalurkan ke bangunan penyimpanan air PLTA, sehingga jumlah air yang terdapat pada bangunan penyimpanan air tergantung
pada debit air sungai. Salah satu kelebihan dari jenis run of river membutuhkan biaya pembangunan yang
lebih murah dari pada jenis reservoir. Oleh karena itu microhydro dalam penelitian ini menggunakan
jenis run of river[1,4,5].
Gambar 1, Representasi skematik dari sebuah Pembangkit Listrik Tenaga Air [3]
Keterangan ,
H = tinggi muka air U = kecepatan air L = panjang penstock
Daya mekanik turbin adalah perbandingan antara tekanan dan aliran sebagai berikut :
Pm K HUP (1)
Dengan,
KP = konstanta proporsional
2.1
Pemodelan Sistem Micro HydroUntuk melakukan simulasi, maka sistem microhydro harus dimodelkan dalam laplace (bentuk linier) menggunakan tools simulink yang ada di MATLAB, sehingga dapat desain kontroler Fuzzy PIPD dapat diaplikasikan pada sistem pembangkit microhydro tersbut. Untuk lebih detail tentang desaind dari sistem microhydro, dalam sub-bab 2 ini akan dibahas secara singkat dan jelas.
2.1.1 Model Liner pembangkit Microhydro
dilarkan ke rurbin penggerak, sehingga saat rutrbin berputar maka shaft generator yang menjadi satu dengan turbin akan bergerak sehingga terbangkit energi listrik yang akan dialirkan ke beban.
Shaft
Gambar 2, Skema Pembangkit microhydro
a. Head Pond [4,5]
Head pond adalah sebuah kolam yang memiliki ketinggian dan digunakan untuk sarana
penyimpanan air harian dari aliran sungai. Air dari head pond akan dialirkan melalui head-race conduit
menuju turbin. Nilai dari tinggi head pond dipengaruhi oleh debit air sungai ke head pond dan aliran air
dari head pond ke head-race conduit. Hubungan antara deras aliran sungai dan head-race conduit dengan
ketinggian head pond ditunjukkan pada persamaan 2.
dH
b. Head-Race Conduit [4.5]
Head-race conduit adalah saluran air yang mengalirkan air dari head pond ke surge tank. Nilai dari
aliran conduit ini dipengaruhi oleh tinggi head pond dan level ketinggian air di surge tank. Hubungan
antara aliran air di head-race conduit dengan ketinggian head pond dan ketinggian air di surge tank
ditunjukkan oleh persamaan 3,
t adalah koofisien rugi-rugi head-race conduit, Cs adalah koofisien rugi-rugi surge tank, Qs
adalah debit air pada surge tank, Hf adalah ketinggian kotor head pond (m), dan Hs adalah level
ketinggian air pada surge tank level (m) terhadap tailwater.
c. Surge Tank [4,5]
Surge tank adalah sebuah tangki yang berfungsi untuk mencegah terjadinya water hammer. Water hammer terjadi akibat menutupnya katup turbin secara tiba-tiba akibat pelepasan baban. Ketingian air
pada surge tank dipengaruhi oleh debit air pada turbin dan debit air di head-race conduit. Hubungan
antara ketinggian air di surge tank dengan debit air di turbin dan head-race conduit ditunjukkan oleh
persamaan 4, dHs
As Qs Qt Q
Dengan, As adalah luas area surge tank (m2) dan Q adalah debit air pada turbin (m3/s).
Skema pembangkit listrik microhydro pada Gambar 2 dapat dinyatkan dalam bentuk laplace pada Gambar 3,
Gambar 3. Model Linier Pembakit Listrik Microhydro
Dengan memodelkan pembangkit microhydro ke dalam bentuk transformasi laplace pada Gambar 3, maka dapat dilakukan simulasi sederhana aplikasi kontrol Fuzzy PIPD untuk mengatur frekuensi dari sistem.
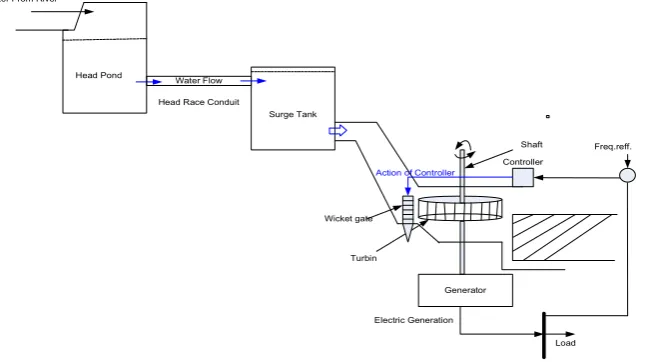
2.1.2 Pengaturan Frekuensi
Permasalahan kestabilan frekuensi pada pembangkit microhydro sampai saat ini terus
dikembangkan. Dengan jumlah debit air dan beban yang berubah-ubah, pengaturan frekuensi dari generator menjadi permasalahan yang serius. Untuk memperoleh gambar pengendalian frekuensi dijelaskan pada Gambar 4.
G
Gambar 4. Skema Pengendali Frekuensi Pada Pembangkit Microhydro
3.
Desain Fuzzy PIPD ControllerFuzzy PIPD merupakan gabungan dari fuzzy Proportional integral (PI) dengan Fuzzy Proportional differential (PD). Untuk membuat desain kontroller fuzzy PIPD, harus ditutunkan terlebih dahulu satu per satu. Pada sub bab ini dibahas secara singkat tentang desain fuzzy PIPD.
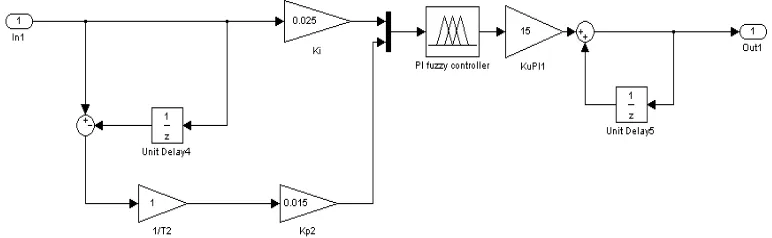
3.1 Fuzzy PI Controller [6,7,8]
Transfer function dari kontroler PI konvensional dalam bentuk persamaan laplace dinyatakan
maka dengan menggunakan invers transformasi–Z diperoleh,
T T T Kp T T T K T
dengan membagi persamaan (3) dengan T, maka di peroleh,
K T T T K T
Gambar 5. Blok Diagram Fuzzy PI Controller
3.1 Desain kontrol Fuzzy PD [7,8,9]
Transfer function dari kontroler PI konvensional dalam bentuk persamaan laplace dinyatakan dengan,
K K
PD P d
U ( s) ( +s ) E ( s) (14)
Persaman (14) dapat ditransformasi dalam bentuk diskrit dengan menggunakan transformasi-Z dengan,
2 1
, dengan menggunakan transformasi-Z diperoleh,
K K
PD PD - P1[ ] d1[ ]
u ( n T ) u ( n T T ) e( n T ) e( n T - T ) e( n T) e( n T - T) (17)
dengan membagi persamaan (17) dengan T, diperoleh
T T T
K
PD - PD - UPD PD
u ( n ) u ( n 1) u ( n ) (21)
Dari hasil penurunan PD controller, dapat digambar sebuah blok diagram PD controller yang ditunjukkan pada Gambar 6.
Gambar 6. Blok Diagram Fuzzy PD Controller [4,6,7]
Blok PI controller dan PD controller bila digabungakan membentuk sebuah kontroler Fuzzy PIPD yang lengkap seperti yang ditunjukkan pada Gambar 7.
Gambar 7. Fuzzy PIPD Controller [7,8,9]
3.1.1 Fuzzifikasi [7,8]
Fungsi keanggotaan input dan output Fuzzy PIPD ditunjukan pada Gambar 8 dan Gambar 9. Input
yang digunakan adalah error (ev) dan delta error (ep), sedangkan output berupa single output (Upi).
Masing-masing fungsi keanggotaan input dan output fuzzy PIPD memiliki 5 buah pengelompokan yaitu
Negative Big (NB), Negative small (NS), zero (Z), Positive small (PS), Positive big (PB). Range yang digunakan dalam fungsi keanggotaan ini adalah (-5,5).
NB NS ZE PS PB
-5 5
Zero
Negative input Positive input
(ep,ev)
Gambar 8, Input dari fungsi keanggotaan Fuzzy PIPD
NB NS ZE PS PB
-5 5
Negatif Output Zero Positif Output
(Upi)
Gambar 9, Output dari fungsi keanggotaan Fuzzy PIPD
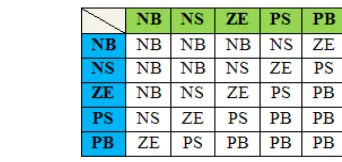
3.1.2 Aturan Kontrol Fuzzy [7,8]
Dengan menggunakan fungsi keanggotaan seperti yang ditunjukan pada Gambar .5 dan Gambar. 6 dapat dibentuk suatu aturan kontrol Fuzzy untuk membangun Fuzzy PIPD Controller, yaitu :
Table 1.Rule base of Fuzzy PIPD Controller inferece system
Aturan kontrol Fuzzy PI PD memiliki 25 aturan seperti yang ditunjukkan pada tabel 1. 25 aturan
Delapan aturan Fuzzy PI PD dapat dipahami dengan cara: jika input dari error (ep) bernilai Negatif Big
(NB) dan delta errornya (ev ) bernilai Negative Big (NB), maka outputnya juga akan menjadi output
Negative Big (NB), jika input dari error (ep) bernilai Negatif Big(NB) dan delta errornya (ev ) bernilai
Negatif Small (NS), maka output akan menjadi Negatif Big (NB). Untuk aturan 3 sampai dengan 25 dapat
dibaca dengan cara yang sama seperti aturan pertama dan aturan kedua sesuai dengan Tabel 1.
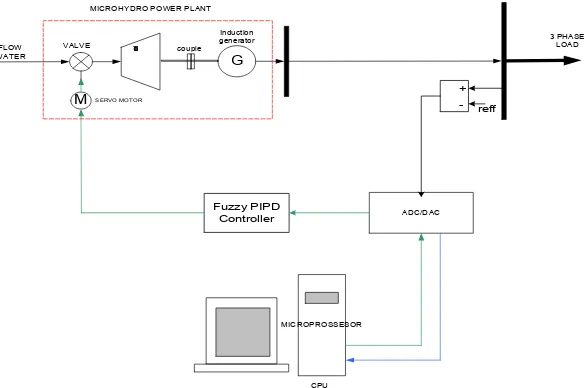
3.1.3 Aplikasi Fuzzy PIPD Contoller Pada Pembangkit Microhydro
Aplikasi dari Kontroler Fuzzy PIPD pada pembakit listrik microhydro dapat dilihat pada Gambar 10. Kontroler digunakan untuk mengendalikan wicket gate sehingga debit air yang digunakan dapat diatur sedemikian rupa sehingga apabila terjadi perubahan beban, maka frekuensi sistem akan distabilkan dengan cepat.
Error (ep)
Gambar 10. Model linier pembakit microhydro dengan Fuzzy PIPD Controller
4.
Simulasi dan AnalisisSimulasi pada penelitian ini menggunakan MATLAB 7.3 dengan memberikan Gangguan pada sistem yaitu berupa perubahan beban sebesar 0.015 p.u. 0.025 p.u dan 0.05 p.u, sedangakan debit air dianggap konstan. Pada Masing-masing gangguan yang diujikan dilakukan pengamatan respon frekuensi sistem terhadap perubahan beban tersebut. Respon Frekuensi sistem akibat perubahan beban 0.015 p.u, 0.025 p.u dan 0.05 p.u dapat dilihat pada gambar 11 sampai 13.
4.1
Respon frekuensi akibat perubahan beban 0.015 p.u0 5 10 15 20 25 30 35 40 45 50
Performance of Frequency Microhydro Power Plan
Times (second)
3 1. W ithout Controller 2. using Fuzzy PI Controller 3. using Fuzzy PIPD Controller
Gambar 11. Respon frekuensi akibat perubahan beban 0.015 p.u
4.2
Respon frekuensi dengan perubahan beban 0.025 p.uGambar 12 merupakan respon frekuensi sistem dengan perubahan beban sebesar 0.025 p.u. Pada tersebut terlihat bahwa sistem tanpa kontroler respon frekeunsi turun sebesar 0.28272 p.u, dan settling time sebesar 3.887 detik. Sistem dengan kontroler fuzzy PIPD memiliki respon frekuensi yang paling bagus yaitu overshoot 0.0001 dan time settling 4.595 detik, sedangkan pada aplikasi Fuzzy PI Controller sistem memiliki overshoot 0.0001 dan time setling 9.719 detik.
0 5 10 15 20 25 30 35 40 45 50
Performance of Frequency Microhydro Power Plan
Times (second)
3 1. W ithout Controller 2. Using Fuzzy PI Controller 3. Using Fuzzy PIPD Controller
Gambar 12. Respon Frekuensi dengan perubahan beban 0.025 p.u
4.3
Repon Frekuensi dengan perubahan beban 0.05 p.u0 5 10 15 20 25 30 35 40 45 50
Performance of Frequenc y Mic rohydro Power Plan
Times (second) 2. Uis ng Fuzz y PI Controller 3. Us ing Fuzz y PIPD Controller
Respon frekuensi terhadapperubahan beban sebesar 0.05 p.u dapat dilihat pada Gambar 13. Pada Gambar 13 terlihat bahwa sistem dengan aplikasi fuzzy PIPD mampu menaikkan performasi frekuensi sistem, dengan overshoot dan settling time yang paling baik, masin-masing adalah 0.0001 p.u dan 4.744 detik. Jika dibadingkan dengan aplikasi PI coantroller yang miliki overshoot dan settling time (0.0001 dan 9.984 detik) atau sistem tanpa kontroller yang mimiliki overshoot dan settling time (0.28726 p.u 3.486 detik) maka sistem dengan Fuzzy PIPD controller memiliki respon yang paling bagus.
5.
Kesimpulan
Dari hasil simulsi yang dilakukan dapat diambil beberapa kesimpulan antara lain:
1. Respon frekuensi sistem tanpa kontroler saat diberi gangguan cenderung turun, meskipun
tetap stabil tetapi penurunan ini juga perlu diperhatikan.
2. Penggunaan Fuzzy PIPD mampu meningkatkan performasi frekuensi sistem, hal ini
terlihat dari overshoot dan settling time dari frekuensi sistem yakni 0 p.u , 4.365 detik
pada perubahan beban 0.015 p.u, 0.0001 p.u , 4.595 detik untuk perubahan beban 0.025
p.u, dan 0.0001 p.u , 4.744 detik dengan perubahan beban sebesar 0.05 p.u.
3. Respon frekuensi sistem dengan aplikasi kontroler fuzzy PIPD memiliki respon yang
paling bagus diantara kontroler lain yang digunakan sebagai pembanding (Fuzzy PI
controller).
4. Pemberian gangguan berupa perubahan beban yang semakin meningkat mulai dari 0.015
p.u sampai dengan 0.025 p.u mempengaruhi respon frekuensi sistem dalam mencapai
kestabilan.
Ucapan Terima Kasih
Kami mengucapakan terima kasih kepada ITS yang telah memberikan fasilatas sehingga makalah penelitian ini dapat terselesaikan tepat pada waktunya.
[1]
Jose I. Sarasua, Jesu's Fraile-Ardanuy, Juan I. Perez, Jose R. Wilhelmi, Jose A. Sanchez, 2007,“Control of a run of river small hydro power plant”, IEEE POWERENG, Setubal, Portugal, hal. 672-677.
[2]
Emmanuel A. Gonzalez, Jingel Tio, Felicito S. Caluyo, 2004, “Conceptual Design Of A Rule-BaseFor A Micro-Hydropower Plant Feedback Control System”, ECE Technical Report, De La Salle University – Manila.
[3]
S.Doola, T.S. Bhatti, “Automatic generation control of an isolated small hydro power plant”, ElectricPower Systems Research 76 (2006) 889-896
[4]
Soedibyo, Mochamad Ashari, Imam Robandi,” Modeling And Controling Micro Hydro Power PlantRun of River Type”, ICAST 2009.
[5]
Soedibyo, Mochamad Ashari, Imam Robandi, “
Perancangan sistem kendali tegangan generator
induksi terintegrasi dengan buck-boost inverter pada pembangkit listrik tenaga
mikrohydro
”. SNTI XVI FTI-ITS. 2009
[6] K.S.Tang,member,IEEE,Kim Fung Man, Senior Member, IEEE, Guanrong
Chen,Fellow,IEEE, and Sam Kwong, Member, IEEE , ”An Optimal Fuzzy PID
Controller”, 2001
[7]
Muh Budi R Widodo, muhammad abdillah, imam robandi aplikasi Fuzzy PIPD pada Singel MachineInfinite Bus (SMIB), Seminar on intelegnet technology and it’s Aplication (SITIA). 2009. Pp-090
[8]
Muh Budi R Widodo, Imam Robandi, “Optimization of Fuzzy PIPD Controller for Excitation SystemStability Analysis on Single Machine Infinite Bus (SMIB) using Genetic Algorithm (GA)” ICAST.
2009.
![Gambar 1, Representasi skematik dari sebuah Pembangkit Listrik Tenaga Air [3]](https://thumb-ap.123doks.com/thumbv2/123dok/3992962.1936382/2.595.219.414.358.437/gambar-representasi-skematik-dari-sebuah-pembangkit-listrik-tenaga.webp)
![Gambar 6. Blok Diagram Fuzzy PD Controller [4,6,7]](https://thumb-ap.123doks.com/thumbv2/123dok/3992962.1936382/7.595.118.517.344.543/gambar-blok-diagram-fuzzy-pd-controller.webp)