DAN GERAKAN BERBASIS
MIKROKONTROLER AT89S51
TUGAS AKHIR
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh :
YUDI PURWANDARU
NIM : 015114020
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
BASED ON AT89S51 MICROCONTROLLER
FINAL PROJECT
In partial fulfillment of the requirements for the SARJANA TEKNIK degree Electrical Engineering Study Program
Created by :
YUDI PURWANDARU
NIM : 015114020
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
v
Saya menyatakan dengan sesungguhnya bahwa skripsi yang saya tulis ini tidak memuat karya atau bagian karya orang lain kecuali yang telah disebutkan dalam kutipan atau daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 07 Februari 2007 Penulis
vi
pada selembar kata-kata :
Perbedaan antara yang mustahil dan yang tidak mustahil, Terletak pada tekad seseorang. (Tommy Lasorda)
Gapailah langit, karena jika melesetpun,
kau tetap akan berada di antara bintang-bintang
Jangan mengharapkan menjadi apa-apa,
selain menjadi dirimu sendiri,
dan cobalah menjadi dirimu yang sempurna.
(St. Francis De Salas)
!
" #
$ %
vii Disusun Oleh : Yudi Purwandaru
015114020
INTISARI
Sebuah mobile robot dapat bergerak berpindah tempat melalui gerakannya dan dapat diprogram dengan berbagai variasi gerak untuk memperoleh kinerja yang bervariasi. Tulisan ini akan menjelaskan bagaimana sebuah mobile robot
yang dirancang untuk menggambar pola-pola sederhana dan pola bebas melalui gerakan yang dibentuknya.
Robot Pembentuk Pola Gambar dan Gerakan berbasis mikrokontroler AT89S51 merupakan sebuah mobile robot yang pengoperasiannya dikendalikan dengan menggunakan sebuah remote kontrol untuk televisi tipe RC-05 dari Philips. Robot dilengkapi alat tulis pena dan sensor deteksi kertas yang dapat diaktifkan penggunaannya. Ada delapan pola gambar yang ditanamkan kepada robot yaitu: pola segitiga, segiempat, lingkaran, trapesium, pentagonal, hexagonal, pola rumah sederhana, dan pola tulisan USD. Satu pilihan pola bebas diberikan agar pengguna dapat menggambar secara manual dengan kendali dari remote kontrol. Robot dilengkapi juga dengan menu pola yang ditampilkan pada layar LCD.
Hasil penelitian memperlihatkan bahwa robot mampu mengerjakan tujuh pola dari delapan pola yang ada dengan baik, yaitu pola segitiga, segiempat, trapesium, pentagonal, hexagonal, rumah sederhana, dan pola tulisan USD. Hasil pola yang dibentuk oleh robot belum begitu sempurna karena garis lurus menjadi sedikit melengkung.
viii Yudi Purwandaru
015114020
Abstract
A mobile robot can make a move to migrate through its movement and can be programmed with various variation of motion to obtain manifold tasks. This thesis would explained on how a mobile robot was created to draw some simple patterns and also free patterns though its movement.
The Drawing Mobile Robot based on microcontroller AT89S51 represent a mobile robot which its operation controlled by television set’s remote control type RC-05 from Phillips. It is equipped with a pen as a tool for drawing and a paper detection sensory which can be activated. There are eight sketch patterns inculcated to robot: triangle, rectangle, circle, trapezoid, pentagon, hexagonal, a simple house pattern, and USD written style pattern. One free pattern choice is given for the user to draw the sketches manually with the controlling from the remote control. The robot is provided with an attractive pattern menu on LCD screen.
The result of research show that the robot able to draw seven sketch pattern from eight existing sketch pattern better, that is triangle, rectangle, trapezoid, pentagon, hexagonal, a simple house pattern, and USD written style pattern. The result of pattern that the robot created is not really in perfect shape because straight line formed becomes a little curve.
ix
Puji syukur kepada Tuhan atas terselesaikannya penulisan skripsi ini. Karya ini sekaligus merupakan tanda akhir dari proses pembelajaran formal dengan mengikuti perkuliahan jenjang strata 1. Akhir dari suatu proses akan menjadi awal bagi proses berikutnya yang membutuhkan pembelajaran baru.
Penulis mengucapkan terima kasih kepada semua pihak yang telah membantu penulis hingga terselesaikannya skripsi ini. Ucapan terima kasih disampaikan kepada:
1. Bapak Djoko Untoro Suwarno, S.Si., M.T., selaku dosen pembimbing I yang telah membimbing dan memberikan saran.
2. Bapak Martanto, S.T., M.T., selaku dosen pembimbing II.
3. Bapak dan Ibu Dosen khususnya jurusan Teknik Elektro yang telah memberi pengetahuan berharga selama kuliah.
4. Kedua orang tuaku dan kakak-kakakku, serta keponakan-keponakan kecilku, Yahya, Fahmi, dan Fadly. Keluarga adalah tempat kedamaian dan sukacita. 5. Laboran Laboratorium Teknik Elektro: Mas Mardi, Mas Broto, dan Mas
Sur, yang telah banyak membantu dalam urusan praktik.
6. Semua rekan di Teknik Elektro, terima kasih banyak atas semuanya.
7. Semua pihak yang tidak dapat disebutkan satu-persatu, terima kasih buat kebaikan kalian semua.
Proses pembelajaran membutuhkan karya “lama” sebagai referensi untuk menciptakan karya “baru”. Demikian pula dengan karya ini, diharapkan dapat menjadi referensi bagi para pembaca untuk mencipta hal baru. Walaupun karya ini tidaklah sempurna, penulis tetap berharap semoga semua pihak dapat mengambil manfaat dari karya ini sebaik-baiknya.
Yogyakarta, 07 Februari 2007
x
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN... iii
HALAMAN PENGESAHAN... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN... vi
INTISARI ... vii
ABSTRACT... viii
KATA PENGANTAR ... ix
DAFTAR ISI ... x
DAFTAR GAMBAR... xv
DAFTAR TABEL ... xix
DAFTAR LAMPIRAN ... xx
BAB I PENDAHULUAN 1.1 Judul ... 1
1.2 Latar Belakang ... 1
1.3 Perumusan Masalah... 2
1.4 Batasan Masalah... 2
1.5 Tujuan... 3
1.6 Manfaat ... 4
1.7 Metodologi Penelitian... 4
1.8 Sistematika Penulisan ... 5
BAB II DASAR TEORI 2.1 Definisi Robot ... 6
2.2 Diagram Blok Sistem dan Cara Kerja Robot ... 8
2.3 Komunikasi Infra Merah dengan Remote Kontrol... 9
2.3.1 Bagian Pemancar ... 9
2.3.2 Bagian Penerima... 12
2.4 Mikrokontroler AT89S51 ... 13
xi
2.4.2 Special Function Register (SFR) ... 15
2.4.3 Register Interupsi... 16
2.4.4 Timer atau Counter... 17
2.4.4.1 Register TMOD (Timer Mode Register) ... 18
2.4.4.2 Register THx dan TLx... 18
2.4.4.3 Register TCON (Timer Control Register) ... 19
2.4.5 Instruksi-Instruksi ... 19
2.4.5.1 Operasi Aritmatika ... 19
2.4.5.2 Operasi Logika... 20
2.4.5.3 Operasi Transfer Data ... 20
2.4.5.4 Operasi Manipulasi Variabel ... 20
2.4.5.5 Operasi Pencabangan ... 20
2.5 Antarmuka Modul LCD M1632... 20
2.5.1 DDRAM (Display Data Random Access Memory)... 21
2.5.2 CGRAM (Character Generator RAM) ... 22
2.5.3 CGROM (Character Generator Read Only Memory).. 22
2.5.4 Register pada Modul LCD ... 22
2.5.4.1 Register Data... 23
2.5.4.2 Register Perintah ... 23
2.6 Detektor Posisi ... 24
2.6.1 Sensor Shaft Encoder... 24
2.6.2 Slotted Optical Switch... 25
2.6.3 Detektor Kertas Menggunakan Fototransistor ... 26
2.7 Op-Amp sebagai Komparator ... 27
2.8 Transistor sebagai Saklar... 28
2.9 Motor DC ... 30
2.10 Driver Motor DC... 31
2.11 Konsep Gerak Melingkar... 32
2.12 Mekanik Roda Gigi ... 34
2.13 Teori Energi Pada Baterai... 36
xii
3.1.1 Konsep Gerak Robot... 39
3.1.1.1 Pola Segitiga ... 40
3.1.1.2 Pola Segiempat... 41
3.1.1.3 Pola Lingkaran ... 42
3.1.1.4 Pola Trapesium ... 43
3.1.1.5 Pola Pentagonal... 45
3.1.1.6 Pola Hexagonal ... 46
3.1.1.7 Pola Rumah Sederhana... 48
3.1.1.8 Pola Tulisan USD... 49
3.1.2 Rancangan Roda Gigi dan Encoder’s Disk ... 51
3.1.3 Mekanik Penggerak Pena ... 53
3.2 Perancangan Elektronis Robot ... 54
3.2.1 Remote Kontrol ... 54
3.2.2 Rangkaian Penerima Sinyal Infra Merah ... 55
3.2.3 Rangkaian Mikrokontroler ... 56
3.2.4 Rangkaian untuk Sensor... 59
3.2.4.1 Detektor Posisi dengan Sensor Shaft Encoder. 59 3.2.4.2 Detektor Media Kertas ... 60
3.3.4.3 Rangkaian untuk Sensor Batas pada Penggerak Pena ... 62
3.2.5 Rangkaian Penggerak Motor ... 63
3.2.5.1 Penggerak Motor Roda... 63
3.2.5.2 Penggerak Motor Pena ... 64
3.2.6 Rangkaian Catu Daya ... 65
3.3 Perancangan Perangkat Lunak ... 65
3.3.1 Inisialisasi LCD ... 66
3.3.2 Inisialisasi Program ... 66
3.3.3 Program Utama ... 67
3.3.4 Decoding Sinyal Infra Merah ... 68
3.3.5 Periksa Hasil Dekode ... 73
3.3.6 Layanan Interupsi Deteksi Kertas ... 74
xiii
3.3.10 Pola Segiempat ... 80
3.3.11 Pola Lingkaran... 82
3.3.12 Pola Trapesium ... 85
3.3.13 Pola Pentagonal ... 88
3.3.14 Pola Hexagonal... 89
3.3.15 Pola Rumah Sederhana ... 91
3.3.16 Pola Tulisan USD ... 94
3.3.17 Gerak Pada Robot ... 96
BAB IV HASIL DAN PEMBAHASAN 4.1 Spesifikasi Robot ... 97
4.2 Kebutuhan Daya pada Robot ... 98
4.2.1 Pengujian Konsumsi Arus pada Robot ... 98
4.2.2 Perkiraan Life-Time Baterai pada Robot ... 100
4.3 Pengujian Detektor Media Kertas ... 101
4.3.1 Pengujian Pada Ragam Warna Media... 101
4.3.2 Pengujian Deteksi Kertas Dalam Pengerjaan Pola ... 102
4.4 Pengujian Robot Dalam Mengerjakan Pola... 104
4.4.1 Pola Manual... 104
4.4.1.1 Pengujian dan Pengamatan ... 104
A. Menurunkan dan Menaikkan Pena ... 104
B. Gerak Maju dan Mundur ... 105
C. Gerak Belok pada Robot ... 105
4.4.1.2 Upaya Perbaikan dan Pengaturan... 106
A. Menurunkan dan Menaikkan Pena ... 106
B. Gerak Maju dan Mundur ... 106
C. Gerak Belok pada Robot ... 108
4.4.2 Pola Segitiga... 109
4.4.3 Pola Segiempat ... 112
4.4.4 Pola Lingkaran... 115
4.4.5 Pola Trapesium ... 117
xiv
4.4.9 Pola Tulisan USD ... 125 4.5 Analisa pada Software ... 128
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan ... 129 5.2 Saran ... 129
xv
Gambar 2.1 Diagram blok sistem robot ... 8
Gambar 2.2 Modulasi sinyal infra merah ... 9
Gambar 2.3 Diagram blok pemancar infra merah ... 10
Gambar 2.4 Modulasi pada pemancar remote kontrol infra merah... 10
Gambar 2.5 Bentuk satu deret pulsa infra merah ... 11
Gambar 2.6 Frame format data RC-05 remote kontrol ... 11
Gambar 2.7 Bentuk kode Bi-Phase atau Manchester... 11
Gambar 2.8 Skema rangkaian pada modul IRM-8510 ... 13
Gambar 2.9 Timing diagram penerima ... 13
Gambar 2.10 Diagram blok mikrokontroler AT89S51 ... 14
Gambar 2.11 Peta memori RAM internal ... 15
Gambar 2.12 Peta SFR ( Special Function Register ) ... 16
Gambar 2.13 Susunan bit dalam register IE ... 19
Gambar 2.14 Susunan bit dalam register TMOD... 22
Gambar 2.15 Susunan bit dalam register TCON... 23
Gambar 2.16 Diagram blok modul LCD M1632 ... 25
Gambar 2.17 Peta alamat DDRAM pada HD44780 ... 26
Gambar 2.18 Encoder’s disk dan deret pulsa yang dihasilkan ... 31
Gambar 2.19 (a) Bentuk fisik slotted optical switch... 31
(b) Simbol slotted optical switch... 31
Gambar 2.20 (a) Rangkaian dengan fototransistor... 31
(b) Rangkaian dengan dioda infra merah... 31
Gambar 2.21 Penempatan fototransistor dan dioda IR... 45
Gambar 2.22 Rangkaian Op-Amp sebagai komparator... 45
Gambar 2.23 Transistor dengan bias base... 34
Gambar 2.24 Kurva karakteristik daerah kerja transistor ... 34
Gambar 2.25 Prinsip sebuah motor DC... 36
Gambar 2.26 (a) Bentuk fisik IC driver L298N... 31
(b) Skema rangkaian di dalam IC driver L298N ... 31
Gambar 2.27 Rangkaian dasar jembatan-H transistor NPN ... 37
xvi
Gambar 2.31 Bentuk lintasan garis yang melengkung ... 41
Gambar 2.32 Fungsi trigonometri untuk derajat simpangan ... 41
Gambar 3.1 Robot tampak atas ... 43
Gambar 3.2 Robot tampak depan ... 44
Gambar 3.3 Gerak robot membentuk pola segitiga... 45
Gambar 3.4 Gerak robot membentuk pola segiempat ... 46
Gambar 3.5 Gerak robot membentuk pola lingkaran ... 48
Gambar 3.6 Gerak robot membentuk pola trapesium ... 49
Gambar 3.7 Gerak robot membentuk pola pentagonal... 50
Gambar 3.8 Gerak robot membentuk pola hexagonal... 52
Gambar 3.9 Gerak robot membentuk pola rumah sederhana ... 53
Gambar 3.10 Gerak robot membentuk pola tulisan USD... 54
Gambar 3.11 Roda gigi reduksi tiga tingkat ... 56
Gambar 3.12 Kotak roda gigi (gear box)... 57
Gambar 3.13 Mekanik penggerak pena ... 59
Gambar 3.14 (a) Rangkaian RC sekuensial ... 60
(b) Grafik kenaikan eksponensial tegangan Vc ... 60
Gambar 3.15 Rangkaian penerima sinyal infra merah ... 60
Gambar 3.16 (a) Rangkaian CR sekuensial ... 60
(b) Grafik penurunan eksponensial tegangan Vr ... 60
Gambar 3.17 Rangkaian mikrokontroler ... 61
Gambar 3.18 Rangkaian untuk sensor shaft encoder... 62
Gambar 3.19 Rangkaian untuk deteksi kertas... 63
Gambar 3.20 (a) Simbol motor-potensio ... 60
(b) Rangkaian untuk sensor batas... 60
Gambar 3.21 Rangkaian driver motor roda L298N ... 65
Gambar 3.22 Rangkaian penggerak motor pena ... 66
Gambar 3.23 Rangkaian catu daya... 67
Gambar 3.24 Diagram alir untuk inisialisasi LCD... 68
Gambar 3.25 Diagram alir untuk inisialisasi program ... 68
Gambar 3.26 Diagram alir untuk program utama ... 68
xvii
Gambar 3.30 Diagram alir untuk periksa isi byte command... 73
Gambar 3.31 Diagram alir untuk periksa deret pulsa berikutnya ... 73
Gambar 3.32 Diagram alir penyimpanan isi perintah pada register... 74
Gambar 3.33 Diagram alir periksa hasil dekode ... 75
Gambar 3.34 Diagram alir rutin layanan deteksi kertas ... 76
Gambar 3.35 Diagram alir rutin pena penulis... 76
Gambar 3.36 Diagram alir pola manual ... 78
Gambar 3.37 Diagram alir untuk pola segitiga ... 79
Gambar 3.38 Diagram alir untuk pola segiempat ... 81
Gambar 3.39 Bentuk PWM pada pola lingkaran ... 83
Gambar 3.40 Diagram alir subrutin Pulse Width Modulation... 84
Gambar 3.41 Diagram alir untuk pola lingkaran... 85
Gambar 3.42 Diagram alir untuk pola trapesium ... 87
Gambar 3.43 Diagram alir untuk pola pentagonal ... 89
Gambar 3.44 Diagram alir untuk pola hexagonal ... 91
Gambar 3.45 Diagram alir untuk pola rumah sederhana ... 93
Gambar 3.46 Diagram alir pola tulisan USD ... 96
Gambar 4.1 Robot Pembentuk Pola Gambar dan Gerakan... 98
Gambar 4.2 Robot menggunakan catu eksternal... 99
Gambar 4.3 Metode pengukuran arus pada rangkaian ... 100
Gambar 4.4 (a) Pengukuran tegangan pada kertas berwarna putih... 105
(b) Pengukuran tegangan pada kertas berwarna coklat ... 105
Gambar 4.5 Garis melengkung untuk gerak maju... 107
Gambar 4.6 Sudut belok dengan adanya inersia ... 107
Gambar 4.7 Rangkaian driver motor roda dengan peubah Rx ... 107
Gambar 4.8 Lintasan garis yang terbentuk dengan peubah Rx... 107
Gambar 4.9 Penambahan breaking system pada gerak belok ... 107
Gambar 4.10 Sudut belok sebesar 1 pulsa dengan sudut belok 2o... 107
Gambar 4.11 Pola segitiga yang dibentuk robot ... 105
Gambar 4.12 (a) Sudut sisi 1 pada pola segitiga ... 105
(b) Sudut sisi 2 pada pola segitiga... 105
xviii
Gambar 4.16 Kelengkungan garis pada sisi pola segiempat... 105
Gambar 4.17 Pola lingkaran yang dibentuk robot... 109
Gambar 4.18 Pola lingkaran setelah langkah perbaikan... 109
Gambar 4.19 Bentuk PWM modifikasi untuk pola lingkaran ... 109
Gambar 4.20 Pola trapesium yang dibentuk robot ... 110
Gambar 4.21 Pengukuran sudut sisi pada pola trapesium ... 107
Gambar 4.22 Bentuk garis sisi yang tidak lurus pola trapesium... 105
Gambar 4.23 Pola pentagonal yang dibentuk robot ... 111
Gambar 4.24 Pengukuran sudut sisi pada pola pentagonal... 107
Gambar 4.25 Garis melengkung pada sisi pola pentagonal... 107
Gambar 4.26 Pola hexagonal yang dibentuk robot ... 112
Gambar 4.27 Pengukuran sudut sisi pada pola hexagonal... 107
Gambar 4.28 Pola rumah sederhana yang dibentuk robot ... 114
Gambar 4.29 Sudut sisi pada pola rumah sederhana ... 107
Gambar 4.30 Garis melengkung pada sisi pola rumah sederhana... 107
Gambar 4.31 Pola tulisan USD yang dibentuk robot ... 115
Gambar 4.32 Pengukuran sudut pada pola tulisan USD... 107
xix
Tabel 2.1 Tabel systemaddress untuk remote tipe RC-05 ... 12
Tabel 2.2 Tabel bit command untuk remote RC-05 ... 12
Tabel 2.3 Bit-bit pada register IE (Interrupt Enable)... 19
Tabel 2.4 Vektor-vektor interupsi AT89S51 ... 19
Tabel 2.5 Tabel kebenaran jembatan-H transistor NPN ... 38
Tabel 3.1 Penggunaan port mikrokontroler ... 73
Tabel 3.2 Hasil pengujian pada slotted optical... 73
Tabel 3.3 Tabel tengok untuk byte command... 73
Tabel 3.4 Tabel tengok untuk perintah pada pola Manual ... 77
Tabel 3.5 Banyak pulsa yang diperlukan untuk pola trapesium ... 77
Tabel 3.6 Banyak pulsa yang diperlukan untuk pola tulisan USD... 77
Tabel 4.1 Konsumsi arus yang terukur pada robot ... 100
Tabel 4.2 Konsumsi daya pada robot dengan catu baterai ... 101
Tabel 4.3 Perkiraan life-time masing-masing baterai ... 103
Tabel 4.4 Tabel untuk ragam warna dari media... 103
Tabel 4.5 Pengujian deteksi kertas dengan variasi tegangan acuan ... 107
Tabel 4.6 Hasil pengamatan ragam lintasan dengan peubah Rx... 108
Tabel 4.7 Pengamatan untuk kecepatan laju robot... 108
Tabel 4.8 Data hasil pengukuran pola segitiga ... 107
Tabel 4.9 Data mengenai besar simpangan tiap sisi segitiga... 108
Tabel 4.10 Data hasil pengukuran pola segiempat... 108
Tabel 4.11 Data mengenai besar simpangan tiap sisi segiempat ... 108
Tabel 4.12 Data hasil pengukuran pola trapesium ... 110
Tabel 4.13 Data mengenai besar simpangan tiap sisi trapesium... 108
Tabel 4.14 Data hasil pengukuran pola pentagonal... 112
Tabel 4.15 Data mengenai besar simpangan tiap sisi pentagonal ... 108
Tabel 4.16 Data hasil pengukuran pola hexagonal... 113
Tabel 4.17 Data mengenai besar simpangan tiap sisi hexagonal ... 108
Tabel 4.18 Data hasil pengukuran pola rumah sederhana ... 114
Tabel 4.19 Data mengenai besar simpangan tiap sisi pola rumah... 108
Tabel 4.20 Data hasil pengukuran pola tulisan USD ... 116
xx Lampiran 1. Gambar rangkaian
Lampiran 2. Listing program Lampiran 3. Gambar robot
1
PENDAHULUAN
1.1
Judul
Robot Pembentuk Pola Gambar dan Gerakan Berbasis Mikrokontroler
AT89S51 (
Drawing Mobile Robot Based On AT89S51 Microcontroller
).
1.2
Latar Belakang
Kebutuhan akan efisiensi dan kemudahan terutama dalam mendesain
gambar dan pola menjadi faktor pemikiran yang tak terelakkan. Sebenarnya
sebuah pola sederhana seperti segitiga misalnya, dapat langsung digambar
secara manual. Media komputer dapat pula menjadi pilihan, sehingga
menggambar pola dapat dilakukan dengan mudah dan hasilnya dapat dicetak
dengan menggunakan
printer
ataupun dengan mesin
plotter
. Tetapi akan
menjadi sebuah permasalahan apabila pola tersebut digambar dalam skala besar,
jumlah yang banyak, atau bahkan tidak pada media kertas saja. Salah satu jalan
adalah dengan menggunakan teknik manual dalam menggambar. Tetapi ini
dapat menimbulkan permasalahan baru, bila pola gambar tersebut dituntut
memiliki tingkat ketelitian tertentu.
Untuk menjawab itu semua, muncul konsep bagaimana mengembangkan
sebuah
mobile robot
yang dapat menggambar pola sederhana melalui gerakan
yang dibuatnya Robot ini diharapkan mampu membentuk pola gambar dan
gerakan secara benar sesuai perintah.
Robot Pembentuk Pola Gambar dan Gerakan yang dirancang disini
merupakan jenis
mobile robot
atau robot yang dapat berpindah tempat. Robot
mampu untuk menggambar sebuah pola pada media kertas yang besar, di lantai,
ataupun jalan, dengan cara membuat suatu lintasan yang sesuai dengan bentuk
pola yang dipilih. Lintasan yang dibentuk akan ditandai dengan sebuah alat tulis
1.3
Perumusan Masalah
Robot Pembentuk Pola Gambar dan Gerakan atau
Drawing Mobile Robot
dirancang dengan menggunakan mikrokontroler AT89S51 sebagai unit
utamanya. Robot dikhususkan untuk dapat mengerjakan perintah menggambar
suatu pola yang telah dipilih sebelumnya, caranya yaitu robot akan membuat
suatu lintasan dan jejak lintasan akan ditandai dengan sebuah alat tulis atau
pena. Robot menggambar pola tersebut pada lahan yang datar (di lantai atau
jalan), atau pada media kertas yang besar seperti A0 (840x1190mm), B0
(1028x1456mm), atau lebih. Ada beberapa bentuk pola yang ditanamkan ke
dalam mikrokontroler AT89S51 pada robot, yaitu pola segitiga, segiempat,
lingkaran, trapesium, pentagonal, hexagonal, pola rumah sederhana, dan pola
tulisan USD. Perintah untuk memilih pola dan menjalankan robot berasal dari
sebuah
infrared remote control
untuk televisi.
Perancangan
Drawing Mobile Robot
ini terbagi menjadi dua bagian yaitu
perancangan perangkat keras (
hardware
) dan perancangan perangkat lunak
(
software
). Perangkat keras yang digunakan meliputi bagian mekanik robot,
bagian elektronik seperti bagian modul penerima sinyal infra merah dari remote
kontrol, rangkaian pendeteksi posisi robot menggunakan sensor
shaft encoder
,
rangkaian
deteksi
keberadaan
kertas
dengan
sensor
foto-transistor,
mikrokontroler AT89S51 sebagai pengolah data dan pengendali, rangkaian
penggerak pena untuk menulis, rangkaian penguat arus untuk penggerak roda,
serta catu daya. Sedangkan perangkat lunak yang digunakan memakai bahasa
assembler atau pemrograman yang antara lain digunakan dalam program dekode
penerimaan sinyal perintah dari remote infra merah, program interupsi untuk
mendeteksi media kertas, dan juga program eksekusi perintah untuk membuat
pola.
1.4
Batasan Masalah
Pada pelaksanaan dan penyusunan tugas akhir ini, penulis membatasi ruang
lingkup permasalahan dengan membuat batasan-batasan permasalahan sebagai
1.
Pola yang diprogramkan pada robot berupa bentuk-bentuk pola dasar
dengan panjang tiap sisi 50 cm seperti segitiga, segiempat, trapesium,
pentagonal, dan hexagonal, pola lingkaran berjari-jari 50 cm, pola rumah
sederhana, dan tulisan “USD”. Diluar pola yang ada, satu pilihan diberikan
untuk menggambar pola secara manual dengan menggunakan kendali
remote.
2.
Pola digambar pada lahan yang datar (di lantai atau jalan), atau pada media
kertas yang besar seperti A0 (840x1190mm), B0 (1028x1456mm), atau
yang lebih besar lagi. Alat penulis disesuaikan dengan media gambar.
3.
Pemanfaatan sebuah remote kontrol infra merah RC-05 yang biasa
digunakan sebagai remote televisi, untuk memberi perintah pada robot.
4.
Penerima sinyal infra merah dari remote berupa modul IRM-8510.
Output
dari modul dapat langsung dihubungkan dengan mikrokontroler untuk
didekode.
5.
Sensor deteksi kertas berupa fototransistor, mampu mendeteksi media yang
dapat memantulkan sinar infra merah dari LED, yaitu media berwarna putih
atau warna cerah lainnya. Kepekaan dalam mendeteksi media dapat diatur
(
adjust
) melalui resistor variabel pada rangkaian detektor.
6.
Bagaimana logika pemrograman menggunakan bahasa assembler untuk
MCS-51 dalam mendekode sinyal infra merah menjadi sebuah bentuk kode
perintah yang diinginkan. Dalam hal ini, sumber perintah berasal dari
remote infra merah.
7.
Bagaimana logika pemrograman dengan bahasa pemrograman yang sama
untuk rancangan eksekusi perintah yang telah didekode ini, berupa program
deteksi kertas bilamana diaktifkan dari remote,
feedback
posisi robot dari
sensor
shaft encoder
, dan pengaturan naik turunnya pena penulis.
1.5
Tujuan
Tujuan dari perancangan dan pembuatan alat ini adalah untuk :
1.
Membuat sebuah
mobile robot
yang mampu untuk menggambar pola pada
2.
Mempelajari dan memanfaatkan piranti mikrokontroler AT89S51 dalam
mengimplementasikan sebuah robot mobil penggambar pola atau
drawing
mobile robot
.
3.
Mempelajari perancangan mekanik dan konsep gerak dari sebuah robot
khususnya dalam pengimplementasian sebuah robot penggambar pola.
4.
Mempelajari cara kerja dan memanfaatkan remote kontrol infra merah
dalam pengimplementasian sebuah alat pemberi perintah pada robot.
1.6
Manfaat
Dengan adanya Robot Pembentuk Pola Gambar dan Gerakan Berbasis
Mikrokontroler AT89S51 menggunakan remote kontrol infra merah, akan
menjadi suatu bentuk inovasi baru yang sangat membantu dan memudahkan
dalam upaya menggambar suatu pola yang memiliki ukuran relatif besar.
Penelitian ini juga dapat memperkaya pengetahuan tentang cara kerja dan
pemanfaatan dari sebuah remote kontrol untuk televisi, serta mikrokontroler
khususnya mikrokontroler AT89S51 yang mulai banyak digunakan untuk
beragam aplikasi kendali serta banyak tersedia di pasaran.
1.7
Metodologi Penelitian
1.
Studi Literature
Meliputi pencarian buku-buku referensi maupun informasi melalui media
internet dan mempelajari hal-hal yang berhubungan tentang model robot,
motor, mikrokontroler, antarmuka modul LCD, dan mengenai komunikasi
infra merah dengan remote kontrol.
2.
Perencanaan dan Penelitian
Perencanaan meliputi perencanaan konsep gerak dan cara menggambar pola
pada robot yang akan ditampilkan, perencanaan mekanik dan penggerak
yang akan dibuat, perencanaan kendali yang akan dipakai, serta perencanaan
program yang akan dibuat. Penelitian meliputi penelitian mengenai
mendekode sinyal infra merah, cara menggerakkan motor, dan penempatan
motor pada mekanik.
1.8
Sistematika Penulisan
Pada penulisan tugas akhir ini penulis membuat sistematika penulisan sebagai
berikut :
BAB I : Pendahuluan
Bab ini berisi tentang latar belakang, perumusan masalah,
pembatasan masalah, tujuan penelitian, manfaat penelitian, dan
sistematika penulisan.
BAB II : Dasar Teori
Bab ini berisi tentang teori yang berkaitan dengan remote kontrol
infra merah tipe RC-05 untuk televisi, rangkaian detektor kertas,
mikrokontroler, modul LCD, sensor
rotary encoder
, sensor batas
dan rangkaian penggerak pena dengan menggunakan
motor-potensio, serta teori singkat mengenai gerak melingkar dan
mekanik roda gigi.
BAB III : Perancangan Alat
Bab ini berisi tentang perancangan rangkaian yang meliputi
penjelasan tentang cara kerja sistem robot dan bentuk-bentuk pola
yang akan digambar, perhitungan jumlah pulsa untuk mengetahui
jarak tempuh, pemilihan komponen yang digunakan dan rangkaian
yang menunjang, serta penulisan program untuk dekode sinyal
remote dan menggambar pola.
BAB IV : Hasil dan Pembahasan
Bab ini berisi tentang hasil pengamatan dan pembahasan, serta
spesifikasi yang diperoleh pada perancangan alat.
BAB V : Penutup
Berisi kesimpulan dan saran-saran untuk perbaikan alat dan
6
DASAR TEORI
2.1
Definisi Robot
Kata robot memiliki arti sebagai pekerja atau pembantu yang memiliki kemampuan untuk melaksanakan pekerjaan-pekerjaan yang berbahaya, pekerjaan berat dan pekerjaan rutin yang membosankan. Namun dalam perkembangannya, definisi dari robot menjadi beragam. Menurut The British Robot Association (BRA), robot adalah peralatan yang dapat diprogram kembali dengan rancangan minimal empat derajat kebebasan untuk manipulasi maupun mengangkut komponen, barang, atau terapan pabrikasi khusus melalui variabel gerakan terprogram untuk pelaksanaan tugas pabrikasi yang spesifik. Menurut Robot Institute of America (RIA), robot adalah manipulator yang dapat diprogramkan kembali atau multi fungsi untuk memindah material atau peralatan spesial yang gerakannya dapat diprogram dengan berbagai variasi untuk memperoleh kinerja yang bervariasi. Sedangkan definisi yang diadopsi oleh International Standards Organitation (ISO) dan disetujui oleh sebagian besar praktisi dan industri, robot industri adalah otomatis, terkendali-servo, freely programmable, manipulator multi fungsi. Operasi terprogram yang variabel membuat eksekusi dari ragam tugas menjadi mungkin.
Secara umum, robot dapat diklasifikasikan dalam tiga golongan, antara lain : 1. Mechano Chiripods
Mechano Chiropods terdiri atas tiga hal, yaitu :
a. Machano chiropods, yaitu peralatan mekanik yang dipasangkan pada tubuh manusia.
b. Sceptrologi, yaitu perlengkapan mekanik yang dipasangkan pada anggota tubuh manusia yang cacat.
c. Exoskeleton, yaitu manusia robot. 2. Telechirs
Telechirs adalah robot yang dapat dikendalikan dari jarak jauh oleh penggunanya, atau dapat disebut sebagai perpanjangan tangan dari operator atau penggunanya dimana organ tubuh pengguna tidak langsung bersentuhan dengan material yang diangkat atau dikerjakan melainkan pada jarak yang aman bagi pengguna. Tujuan penggunaan
telechirs antara lain : untuk meningkatkan kekuatan dan daya, untuk keperluan di tempat yang berbahaya, dan sebagai manipulator mikro misalnya dalam bidang kedokteran.
3. Robot Industri
Robot industri dalam aplikasinya berupa :
a. Senseless, immobile robot, yaitu robot tanpa sensor dan stasioner pada tempatnya
b. Robot dengan sensor
c. Mobile robot, yaitu robot yang dapat bergerak ke tempat lain untuk keperluan operasi yang memiliki jarak tempuh.
d. Mobile robot dengan sensor, robot ini dapat bergerak, dikendalikan secara mudah, dan dapat diberikan kecerdasan buatan (artificial intelligent) dan mampu beradaptasi dengan kondisi yang ada (system adaptive).
2.2
Diagram Blok Sistem dan Prinsip Kerja Robot
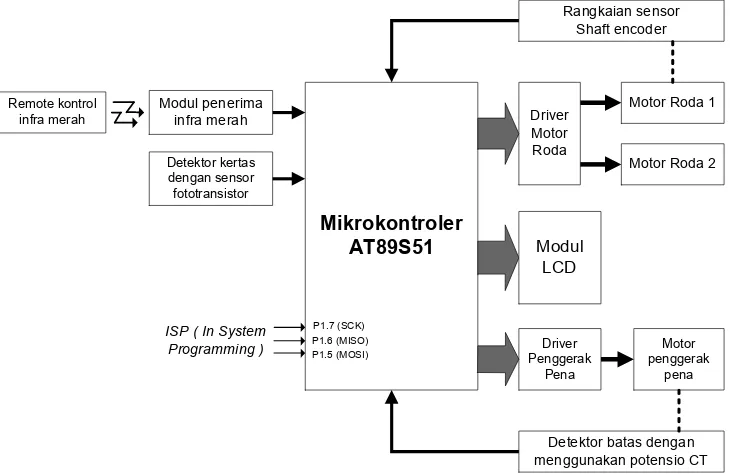
Rancangan sistem secara umum dari Robot Pembentuk Pola Gambar dan Gerakan memiliki diagram blok sebagai berikut :
Modul penerima
infra merah Driver Motor Roda
Motor Roda 1
Motor Roda 2 Rangkaian sensor
Shaft encoder
Detektor kertas dengan sensor fototransistor
Driver Penggerak
Pena
Motor penggerak
pena Remote kontrol
infra merah
P1.5 (MOSI) P1.6 (MISO) P1.7 (SCK)
Modul LCD
Detektor batas dengan menggunakan potensio CT
Gambar 2.1 Diagram blok sistem robot.
Robot Pembentuk Pola Gambar dan Gerakan merupakan mobile robot
yang dilengkapi dengan alat penulis berupa pena; diletakkan tepat ditengah-tengah dari dimensi robot. Mekanisme gerak pena penulis berupa gerak turun-naik, digerakkan oleh motor penggerak. Perintah untuk mengerjakan pola dan deteksi media kertas berasal dari sebuah remote kontrol infra merah. Robot akan berhenti bila media kertas tidak terdeteksi atau tidak ada saat fasilitas ini diaktifkan. Layanan untuk mendeteksi keberadaan media kertas ini bermanfaat dalam kaitan penggunaan jenis pena penulis dengan media gambar.
Robot menggunakan motor DC untuk menggerakkan roda. Sebuah sensor posisi berupa shaft encoder diletakkan pada roda robot. Sensor ini berperan untuk mengetahui posisi aktual robot disaat mengerjakan perintah gambar. Robot dapat bergerak maju dengan jarak tertentu yaitu dengan cara mencacah rotasi dari encoder, sama halnya ketika robot berbelok dengan sudut tertentu. Pengaturan resolusi dari sensor shaft encoder akan menentukan hasil maksimal dari kerja robot terutama dalam hal ketelitian.
2.3
Komunikasi Infra Merah dengan Remote Kontrol
Komunikasi infra merah dilakukan dengan menggunakan dioda infra merah pada remote kontrol sebagai pemancar dan modul infra merah sebagai penerimanya. Untuk menghindari kerusakan atau cacat data akibat noise dan interferensi, dan untuk mendapatkan jarak pancar yang cukup jauh, maka diperlukan pemodulasian data infra merah pada pemancar.
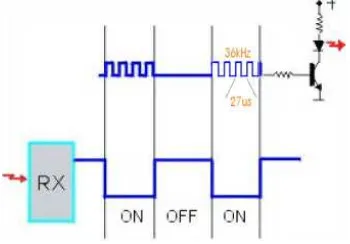
Proses modulasi dilakukan dengan mengubah kondisi logika 0 dan 1 menjadi kondisi ada dan tidak ada sinyal carrier infra merah yang berkisar antara 30 KHz sampai 50 KHz. Pada komunikasi infra merah kondisi idle adalah kondisi tidak adanya sinyal carrier. Bentuk modulasi sinyal infra merah ditunjukkan dengan gambar 2.2 berikut.
Gambar 2.2 Modulasi sinyal infra merah.
2.3.1
Bagian Pemancar
Pemancar infra merah umumnya terdiri dari bagian modulator, bagian penguat, dan dioda infra merah, seperti ditunjukkan gambar 2.3.
Sinyal dimodulasi sebagai gelombang kotak dengan frekuensi antara 30 KHz sampai 50 KHz. Untuk pemancar dengan menggunakan remote kontrol tipe RC-05, dipancarkan dengan frekuensi 36 KHz sehingga gelombang kotak rata-ratanya memiliki periode 27 s yang diberikan pada basis transistor sebagai penguat bagi LED infra merah. Gambar 2.4 adalah bentuk modulasi pada pemancar remote kontrol infra merah.
Gambar 2.4 Modulasi pada pemancar remote kontrol infra merah.
Pemancar infra merah menggunakan remote kontrol tipe RC-05. Tipe RC-05 adalah jenis format data dari Philips dan digunakan pada remote untuk televisi yang memiliki 32 command yang berbeda. Pulsa data dimodulasi pada frekuensi 36 KHz dan setiap keyword dari RC-05 remote kontrol infra merah adalah 14 bit, 1,728 ms per-bit, dan keyword yang dipancarkan akan diulang setiap 130ms apabila tombol tetap ditekan. Deret pulsa sebuah keyword ditunjukkan pada gambar 2.5.
Gambar 2.5 Bentuk satu deret pulsa infra merah.
untuk menyeleksi satu dari 32 sistem yang mungkin. Enam bit berikutnya merupakan bit perintah (command) yang mempresentasikan satu dari 64 perintah yang berbeda tiap alamat. Frame format dapat dilihat pada gambar 2.6.
St1 St2 Check S4 S3 S2 S1 S0 C5 C4 C3 C2 C1 C0
Gambar 2.6 Frame format data RC-05 remote kontrol.
Semua bit dari remote ditransmisikan secara serial dalam kode bi-phase
yang juga dikenal sebagai kode manchester, seperti ditunjukkan dengan gambar 2.7.
Gambar 2.7 Bentuk kode Bi-Phase atau Manchester.
Remote kontrol untuk televisi dari Philips menggunakan alamat sistem atau address 00h, sehingga dalam pembuatan program encoding
akan menggunakan alamat ini. Sebagai gambaran, tabel 2.1 menunjukkan sistem pengalamatan (system address) dari remote tipe RC-05.
Tabel 2.1 Tabel systemaddress untuk remote tipe RC-05.
System Address Equipment
0 TV set
2 Teletext
5 Video Recorder
7 Experimental
16 Preamplifier
17 Receiver / Tuner
18 Tape / Cassette Recorder
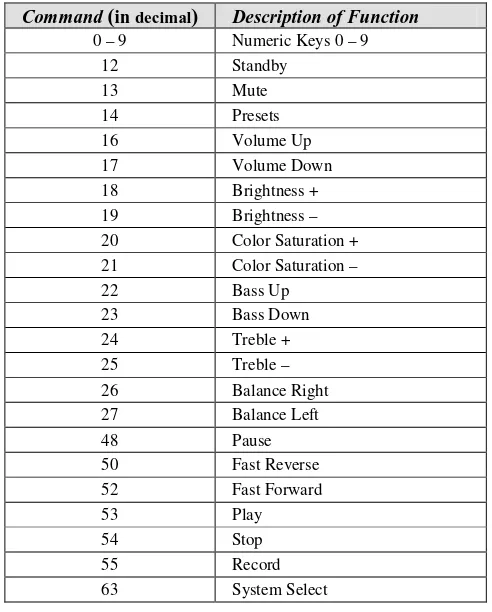
19 Experimental
Tabel 2.2 Tabel bit command untuk remote RC-05.
Command (in decimal) Description of Function 0 – 9 Numeric Keys 0 – 9
12 Standby
13 Mute
14 Presets
16 Volume Up
17 Volume Down
18 Brightness + 19 Brightness – 20 Color Saturation + 21 Color Saturation –
22 Bass Up
23 Bass Down
24 Treble +
25 Treble –
26 Balance Right 27 Balance Left
48 Pause
50 Fast Reverse 52 Fast Forward
53 Play
54 Stop
55 Record
63 System Select
2.3.2
Bagian Penerima
Bagian penerima yang digunakan berupa modul IRM-8510, terdiri dari photo diode yang sudah dilengkapi dengan rangkaian band pass filter
yang hanya melewatkan frekuensi antara 30 KHz sampai 50 KHz (lihat gambar 2.8). Modul IRM-8510 terbungkus dengan plat yang terhubung dengan ground rangkaian untuk melindungi rangkaian dari interferensi
noise.
Output dari modul berupa logika 0 dan 1 sehingga dapat langsung dihubungkan ke mikrokontroler di bagian penerima. Frekuensi 36 KHz yang diterima dari pancaran dioda infra merah remote diubah menjadi logika 0 dan tidak adanya frekuensi sebagai logika 1, seperti timing
diagram pada gambar 2.9.
Gambar 2.9 Timing diagram penerima.
Komunikasi data serial antara sebuah pemancar dan sebuah penerima pada media infra merah hanya menggunakan satu jalur saja yaitu jalur data tanpa memerlukan sinyal clock sebagai sinkronisasi. Oleh karena itu transmisi serial selalu dilakukan secara asinkron dimana setiap paket data diawali dengan start bit dan diakhiri dengan stop bit.
2.4
Mikrokontroler AT89S51
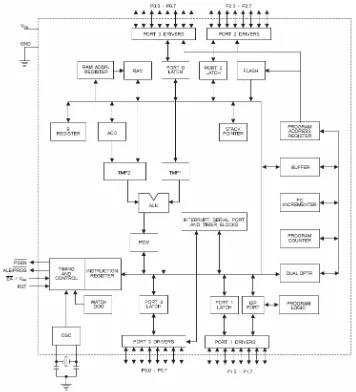
Mikrokontroler AT89S51 merupakan mikrokontroler 8 bit yang berbasis arsitektur MCS-51. Pilihan menggunakan mikrokontroler AT89S51 karena memiliki kelengkapan-kelengkapan yang diperlukan untuk bekerja dalam sistem single chip, memiliki kemampuan In System Programming
Gambar 2.10 Diagram blok mikrokontroler AT89S51.
2.4.1
Struktur Memori
Memori merupakan rangkaian elektronis yang digunakan untuk menyimpan informasi secara temporer atau permanen. Memori biasanya digunakan untuk menyimpan data yang diperoleh dari saluran masukan-keluaran atau untuk menyimpan program dari sebuah sistem.
Mikrokontroler AT89S51 mempunyai struktur memori yang terpisah yaitu memori program yang menggunakan teknologi flash memory dan memori data berupa RAM. Memori data (RAM) yang tersedia sebesar 128
2.4.1.1
Memori Data
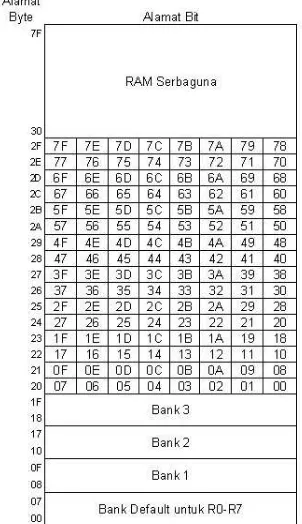
Memori data internal terdiri dari 128 bytes RAM dan SFR (Special Function Register). Semua byte dengan alamat 00h – 7Fh ini dapat diakses menggunakan pengalamatan secara langsung maupun tidak langsung. Adapun peta memori dari RAM internal ditunjukkan dengan gambar 2.11.
Gambar 2.11 Peta memori RAM internal.
2.4.1.2
Memori Program
Memori program atau flash memory pada mikrokontroler AT89S51 memiliki kapasitas sebesar 4 Kbytes yang hanya bisa digunakan untuk membaca saja. Program memori ini dapat diakses pada alamat 0000h
sampai 0FFFh hanya bila pin EA/VPP pada AT89S51 berlogika high.
2.4.2
Special Function Register ( SFR )
Gambar 2.12 Peta SFR ( Special Function Register ).
2.4.3
Register Interupsi
Register interupsi berfungsi untuk melayani interupsi baik oleh perangkat internal maupun perangkat eksternal, berikut pengaturan prioritas interupsi yang dilayani. AT89S51 menyediakan 5 sumber interupsi yaitu dua interupsi eksternal, dua interupsi timer, dan sebuah interupsi port serial. Register-register yang berhubungan dengan interupsi adalah register IE (Interrupt Enable) yang terletak pada alamat A8h, dan register IP (Interrupt Priority) yang terletak pada alamat B8h.
Sumber interupsi dapat diaktifkan dan dinonaktifkan dengan mengatur bit-bit yang terkait dalam register IE. Pada register IE terdapat sebuah bit yang digunakan untuk mengaktifkan dan menonaktifkan interupsi secara keseluruhan (global) yaitu bit IE.7 yang disimbolkan dengan EA. Susunan bit dalam register IE ditunjukkan dengan gambar 2.13 dan tabel 2.3 berikut.
IE – Interrupt Enable Register
Tabel 2.3 Bit-bit pada register IE (Interrupt Enable).
Simbol Posisi Fungsi
! ! " #
! ! !
Saat suatu interupsi diterima, nilai yang disimpan ke PC (program counter) sebagai alamat RLI (rutin layanan interupsi) selanjutnya disebut sebagai vektor interupsi (lihat tabel 2.4), yang sekaligus merupakan awal alamat RLI yang bersangkutan.
Tabel 2.4 Vektor-vektor interupsi AT89S51.
Interupsi Tanda (flag) Alamat vektor
$ !!!!%
! ! !!! %
! &! !!! %
!! %
& !! %
$ !! %
2.4.4
Timer atau Counter
Mikrokontroler AT89S51 memiliki dua buah timer, yaitu timer 0 dan
timer 1. Kedua timer ini dapat difungsikan sebagai timer atau sebagai
counter tergantung pada sinyal detak yang diberikan. Jika sebuah pencacah bekerja dengan frekuensi tetap, maka dapat dikatakan bahwa pencacah tersebut bekerja sebagai timer atau pewaktu. Jika sebuah pencacah bekerja dengan frekuensi yang bervariasi, dapat dikatakan bahwa pencacah tersebut bekerja sebagai counter atau pencacah.
2.4.4.1
Register TMOD ( Timer Mode Register )
Register ini digunakan untuk mengatur mode kerja dari timer. Register TMOD dibagi menjadi dua bagian secara simetris, yaitu : bit 0 sampai 3 (TMOD.0 sampai TMOD.3) dipakai untuk mengatur timer 0, sedangkan bit 4 sampai 7 (TMOD.4 sampai TMOD.7) dipakai untuk mengatur timer 1. Susunan bit pada register TMOD dapat dilihat pada gambar 2.14.
Gambar 2.14 Susunan bit dalam register TMOD.
Penjelasan mengenai register TMOD adalah sebagai berikut : 1. Bit M0 dan M1 dipakai untuk menentukan mode kerja timer. 2. Bit C/~T dipakai untuk mengatur sumber sinyal detak yang
diberikan ke pencacah biner. Jika C/~T = 0, maka sinyal detak diperoleh dari osilator kristal yang frekuensinya sudah dibagi 12, sedangkan jika C/~T = 1, maka sinyal detak diperoleh dari kaki T0 (untuk timer 0) atau kaki T1 (untuk timer 1).
3. Bit GATE adalah bit pengatur saluran sinyal detak. Bila GATE= 0, saluran sinyal detak hanya diatur oleh bit TRx. Jika GATE = 1, kaki INT0 (untuk timer 0) atau kaki INT1 (untuk timer 1) yang dipakai untuk mengatur saluran sinyal detak.
2.4.4.2
Register THx dan TLx
2.4.4.3
Register TCON ( Timer Control Register )
Register ini digunakan untuk mengatur kontrol kerja dari timer. Register TCON dibagi menjadi dua bagian, 4 bit pertama (bit 0 sampai dengan bit 3) dipakai untuk keperluan mengatur masukan INT0 dan INT1. Sisa 4 bit berikutnya (bit 4 sampai dengan bit 7) dibagi menjadi dua bagian secara simetris yang dipakai untuk mengatur timer 0 dan
timer 1, sebagai berikut :
a) Bit TFx merupakan bit indikator terjadinya limpahan atau
overflow dimana kondisi pencacah berubah dari FFFFh kembali menjadi 0000h. Bit TFx bisa di-nol-kan secara manual dengan instruksi clear.
b) Bit TRx merupakan bit pengatur saluran sinyal detak. Bila bit TRx = 0, maka sinyal detak tidak disalurkan ke pencacah biner sehingga pencacah berhenti melakukan pencacahan. Bila bit GATE =1 pada register TMOD, maka saluran sinyal detak diatur bersama oleh TRx dan sinyal pada pin atau kaki INTx.
Susunan bit dalam register TCON dapat dilihat pada gambar 2.15.
Gambar 2.15 Susunan bit dalam register TCON.
2.4.5
Instruksi –Instruksi Mikrokontroler
Mikrokontroler AT89S51 memiliki beberapa kelompok instruksi sebagaimana mikrokontroler yang memiliki arsitektur MCS-51. Berikut adalah kelompok instruksi yang digunakan antara lain:
2.4.5.1
Operasi Aritmatika
2.4.5.2
Operasi Logika
Terdiri dari ANL, ORL, XRL, CLR, CPL, RL, RLC, RR, RRC, SWAP. Instruksi ini berguna untuk program yang memerlukan operasi logika seperti AND, OR, XOR, Complement, Rotate.
2.4.5.3
Operasi Transfer Data
Berfungsi untuk menyalin ataupun mengambil data yang tersimpan di dalam memori program dan memori data. Instruksi-instruksi tersebut meliputi : MOV, MOVC, MOVX, PUSH, POP, XCH, XCHD.
2.4.5.4
Operasi Manipulasi Variabel
Instruksi-instruksi untuk operasi ini seperti : CLR, SETB, CPL, ANL, ORL, MOV, JC, JNC, JB, JNB, JBC.
2.4.5.5
Operasi Pencabangan
Instruksi-instruksi untuk operasi ini seperti : ACALL, LCALL, RET, RETI, AJMP, LJMP, SJMP, JMP, JZ, JNZ, CJNE, NOP.
2.5
Antarmuka Modul LCD M1632
LCD (liquid crystal display) merupakan media penampil data efektif yang memerlukan pengendali layar LCD dalam pengoperasiannya. Modul M1632 merupakan modul pengendali layar LCD matrik untuk konfigurasi 16 karakter dan 2 baris dengan setiap karakternya dibentuk oleh 8 baris
pixel, 5 kolom pixel, dan 1 baris pixel terakhir adalah kursor. Diagram blok dari modul LCD M1632 dapat dijelaskan dengan gambar 2.16 berikut.
Gambar 2.16 Diagram blok modul LCD M1632.
1) Pin 1 (GND) : Pin ini berhubungan dengan ground dari power supply. 2) Pin 2 (VCC) : Tegangan +5 volt dari power supply.
3) Pin 3 (VEE) : Tegangan pengatur kontras LCD.
4) Pin 4 (RS) : Register Select, pin pemilih register yang akan diakses. Untuk akses ke Register Data, logika pada pin ini adalah 1, dan untuk akses ke Register Perintah, logika pada pin ini adalah 0.
5) Pin 5 (R/W) : Logika 1 pada pin ini menunjukkan bahwa modul LCD ada pada mode pembacaan, dan logika 0 menunjukkan bahwa modul LCD ada pada mode penulisan. Untuk aplikasi yang tidak memerlukan pembacaan data pada modul, pin ini dapat dihubungkan langsung ke ground. 6) Pin 6 (E) : Enable Clock LCD, logika 1 pada pin ini diberikan pada
saat penulisan atau pembacaan data.
7) Pin 7-14 (D0-D7) : Data Bus, kedelapan pin ini berperan dalam aliran data 4 bit ataupun 8 bit pada saat proses penulisan maupun pembacaan data.
8) Pin 15 (Anoda) : Tegangan positif untuk backlight LCD sekitar 4,5 volt. 9) Pin 16 (Katoda) : Tegangan negatif untuk backlight LCD.
Modul M1632 dilengkapi dengan mikrokontroler HD44780 buatan Hitachi sebagai pengendali yang mampu mengatur proses scanning pada layar LCD. HD44780 memiliki beberapa jenis memori yaitu CGROM, CGRAM, dan DDRAM.
2.5.1
DDRAM (Display Data Random Access Memory)
Gambar 2.17 Peta alamat DDRAM pada HD44780.
2.5.2
CGRAM (Character Generator Random Access Memory)
CGRAM merupakan memori untuk menggambarkan pola sebuah karakter dan bentuk karakter yang dapat diubah-ubah sesuai dengan keinginan. Akan tetapi isi memori ini bersifat volatile, artinya pola karakter akan hilang apabila power supply tidak aktif.
2.5.3
CGROM (Character Generator Read Only Memory)
CGROM merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut sudah ditentukan secara permanen pada HD44780 dan pengguna tidak dapat mengubahnya lagi. Pola-pola karakter tersimpan pada lokasi-lokasi tertentu dalam CGROM. Misalnya, pada saat HD44780 akan menampilkan data 41h yang tersimpan pada DDRAM, maka HD44780 akan mengambil data di alamat 41h yang ada pada CGROM, yaitu pola karakter “A”. Memori ini bersifat permanen atau non-volatile sehingga pola karakter tidak akan hilang walaupun power supply
tidak aktif.
2.5.4
Register pada Modul LCD
2.5.4.1 Register Data
Register dimana mikrokontroler dapat menuliskan atau membaca data dari atau menuju DDRAM maupun CGRAM. Akses data ke DDRAM, baik penulisan maupun pembacaan, merupakan akses ke bagian memori tampilan pada layar LCD. Sedangkan data akses ke CGRAM merupakan proses untuk mengedit pola karakter yang ada pada lokasi CGRAM tersebut.
Penulisan data ke Register Data dilakukan untuk mengirimkan data yang akan ditampilkan pada LCD. Proses ini diawali dengan adanya logika 1 pada RS yang menunjukkan akses ke Register Data, kondisi R/W diatur pada logika 0 yang menunjukkan proses penulisan data. Data pada data bus dikirim dengan diawali pulsa clock logika 1 pada pin
Enable.
Pembacaan data dari Register Data dilakukan untuk membaca kembali data yang tertampil pada LCD. Proses ini memiliki langkah yang sama dengan kondisi R/W diatur pada logika 1 yang menunjukkan proses pembacaan data.
2.5.4.2
Register Perintah
Perintah-perintah dari mikrokontroler menuju HD44780 selaku pengendali modul diberikan pada register ini yang disebut sebagai proses penulisan data. Register ini juga sebagai tempat status dari HD44780 yang dapat dibaca dengan proses pembacaan data.
Penulisan data ke Register Perintah dilakukan dengan tujuan mengatur tampilan LCD, inisialisasi, dan mengatur address counter
maupun address data. Proses diawali dengan adanya logika 0 pada RS yang menunjukkan akses ke Register Perintah, kondisi R/W diatur pada logika 0 yang menunjukkan proses penulisan data. Data pada data bus
dikirim dengan diawali pulsa clock logika 1 pada pin Enable.
Pembacaan data dari Register Perintah dilakukan untuk melihat
2.6
Detektor Posisi
Detektor posisi merupakan bentuk rangkaian deteksi posisi yang berfungsi untuk memonitoring dan menganalisis gejala yang terjadi pada posisi suatu benda. Hal ini sangat penting dalam upaya mengendalikan posisi dari benda yang dikendalikan.
2.6.1
Sensor Shaft Encoder
Sensor shaft encoder merupakan bentuk sensor yang dapat men-deteksi perubahan sudut dari rotasi yang terjadi sehingga dapat memonitor gerakan atau perubahan posisi.
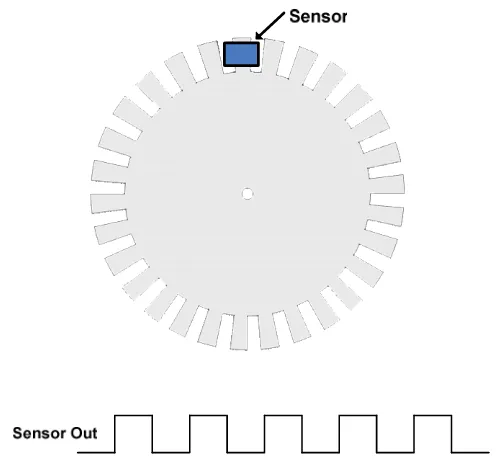
Sensor shaft encoder terdiri dari encoder yang terbuat dari piringan bercelah yang tipis, LED infra merah sebagai sumber cahaya atau pemancar, dan sebuah fototransistor sebagai penerima (lihat gambar 2.18) yang dapat memberikan suatu deret pulsa sebagai interpretasi perubahan dalam bentuk gerakan, posisi, atau arah. LED infra merah dan fototransistor berada dalam satu kemasan kompak yang disebut sebagai sensor slotted optical switch.
LED infra merah ditempatkan disisi piringan encoder sehingga cahaya secara kontinyu difokuskan ke celah piringan. Berkas cahaya akan mengaktifkan fototransistor yang ditempatkan pada sisi lain dari piringan. Fototransistor disini berfungsi sebagai pendeteksi ada tidaknya cahaya dari LED. Piringan encoder terhubung dengan motor sehingga dapat berputar selaras dengan gerak motor. Dengan adanya celah pada piringan encoder
dan gerak berputar maka secara simultan slotted optical switch akan menghasilkan suatu deret pulsa yang diharapkan. Pulsa yang dihasilkan akan digunakan untuk memicu pencacah pada mikrokontroler.
Gambar 2.18 Encoder’s disk dan deret pulsa yang dihasilkan.
2.6.2
Slotted Optical Switch
Slotted optical switch merupakan piranti yang berfungsi sebagai sensor cahaya, yang terdiri dari bagian sumber (source) dan penerima (receiver). Bagian sumber berupa LED infra merah, sedangkan penerimanya berupa fototransistor (lihat gambar 2.19). Slotted optical switch dibuat dalam kemasan yang kompak sehingga cahaya yang dipancarkan sumber dapat diterima dengan baik oleh penerima fototransistor.
2.6.3
Detektor Kertas Menggunakan Fototransistor
Fototransistor merupakan transistor yang bekerja dengan didasarkan pada energi cahaya. Energi cahaya yang masuk akan menghasilkan aliran elektron pada base menuju emitter yang dapat membuat fototransistor tersebut aktif. Aliran arus yang terjadi pada base (IB) memungkinkan
adanya arus pada collector (IC) yang besarnya sebanding dengan arus base
(IB) yang dikalikan faktor penguatan fototransistor β (beta). Rangkaian
untuk fototransistor ditunjukkan dengan gambar 2.20 (a).
VCC
C
fototransistor
E
IR diode
R
VCC
Out
Re
Gambar 2.20 (a) Rangkaian dengan fototransistor. (b) Rangkaian dengan dioda infra merah.
Saat tidak ada energi cahaya yang masuk, fototransistor dalam keadaan mati dan tidak ada tegangan pada output. Sedangkan saat fototransistor aktif, akan timbul tegangan pada output yang memenuhi persamaan :
Vo = VCC – VCE – IE.RE ...(2-1)
IE≈ IC sehingga,
Vo = VCC – VCE – IC.RE ...(2-2)
Sebuah dioda infra merah atau infrared emitting diode digunakan sebagai pemancar energi cahaya. Intensitas pancaran cahaya infra merah ditentukan oleh besarnya arus maju (IF) pada dioda. Gambar 2.20 (b)
merupakan rangkaian dengan dioda infra merah, arus maju IF memenuhi
persamaan
IF =
R Vd Vcc−
...(2-3)
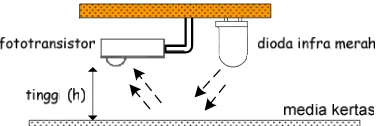
yang masuk ke fototransistor akan memiliki tingkat energi beragam yang didasarkan pada warna, jenis bahan media kertas, dan tinggi (h) detektor terhadap media. Sehingga pada akhirnya akan timbul arus collector IC dan
tegangan pada output yang beragam pula untuk tiap warna dan jenis kertas.
Gambar 2.21 Penempatan fototransistor dan dioda IR.
2.7
Op-Amp sebagai Komparator
Penguat Operasi sebagai komparator digunakan sebagai pembanding tegangan yang akan menandingkan tegangan sebuah masukan dengan tegangan masukan lainnya (lihat gambar 2.22). Dalam konfigurasi modus kalang terbuka, adanya sedikit perbedaan tegangan diantara kedua masukan akan mengayunkan Op-Amp ke dalam wilayah saturasi. Arah saturasi keluaran ditentukan oleh polaritas sinyal masukan. Bila tegangan masukan
inverting lebih positif dibandingkan tegangan masukan non-inverting, keluaran berayun menuju saturasi negatif (-Vsat). Sebaliknya bila tegangan
masukan inverting lebih negatif dibandingkan tegangan masukan non-inverting, keluaran berayun menuju saturasi positif (+Vsat). Untuk polatitas
dan amplitudo tegangan kedua masukan sama, maka keluaran akan nol.
3
2
1 +
-OUT
+VCC
V2
R V1
R
RL
Vout = Vsat x sign(V2 - V1) -VEE
Vout
Gambar 2.22 Rangkaian Op-Amp sebagai komparator.
2.8
Transistor sebagai Saklar
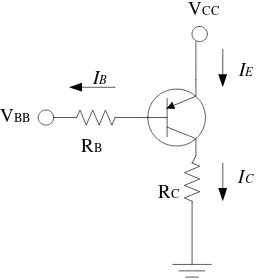
Transistor merupakan komponen dengan 3 kaki yaitu base, collector
dan emitter. Gambar 2.23 memperlihatkan konfigurasi dasar apabila dibias
base. Transistor mempunyai 3 daerah kerja berbeda yaitu daerah aktif, daerah cut-off, dan daerah saturasi. Gambar 2.24 memperlihatkan kurva karakteristik untuk daerah kerja transistor.
RB
RC
IB IE
IC
VCC
VBB
Gambar 2.23 Transistor tipe PNP dengan bias base.
Gambar 2.24 Kurva karakteristik daerah kerja transistor.
Pada daerah aktif, besarnya arus base menentukan besarnya arus
collector. Besarnya arus collector sebanding dengan besarnya arus base
dikali dengan besarnyaβ (beta). Pada daerah ini collector dibias maju
B
C I
I =
β
. ………...………...….(2-4)Besarnya IB adalah
B B BE CC B R V V V
I = − − ………...…...…(2-5)
C C CC
CE V I R
V = − . ………..………....……….(2-6)
Saat transistor aktif, tegangan VBE berada pada 0,7 volt, sehingga ada arus
yang mengalir melalui emitter menuju base (transistor tipe PNP).
Pada daerah cut-off, transistor mati atau arus base tidak mencukupi untuk menyalakan transistor dan kedua sambungan p-n memiliki bias balik. Tegangan base-emitter (VBE) untuk keadaan ini berada dibawah 0,7 volt.
A IB ≈0
(cut off) CC
CE V
V − = ………...…………(2-7)
Keadaan terakhir dari bias transistor adalah saturasi. Pada keadaan ini, arus emitter cenderung selalu tetap untuk perubahan arus base. Pertambahan arus base akan menyebabkan kenaikan arus emitter dan penurunan tegangan antara emitter dan collector.
(saturasi) CE CE V
V =
Dengan mengabaikan tegangan antara emitter dan collector (karena cukup kecil saat transistor saturasi), maka besarnya arus collector adalah
C BE CC C R V V
I = − ...(2-8)
( ) V
VCEsaturasi =0.2
≈0V
( ) C CC E saturasi C R V I
I = ≅ ...(2-9)
2.9
Motor DC
Motor DC adalah suatu alat yang dapat mengubah energi listrik menjadi energi gerak dengan prinsip elektromagnet. Setiap motor memiliki dua bagian dasar yaitu :
1. Bagian yang tetap atau stasioner disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektromagnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor atau armature. Rotor ini berupa sebuah koil dimana arus listrik mengalir.
Prinsip dari motor DC secara sederhana ditunjukkan dengan kawat loop tunggal seperti pada gambar 2.25 berikut.
Gambar 2.25 Prinsip sebuah motor DC.
Gerakan motor DC dapat dengan mudah diatur bergerak searah jarum jam atau clock wise ( CW ) maupun bergerak berlawanan dengan arah jarum jam atau counter clock wise ( CCW ) hanya dengan membalik arah arusnya, yang berarti polaritas pada sikat dibalik.
2.10
Driver Motor DC
Rangkaian driver motor dengan IC (integrated circuit) L298N memungkinkan untuk digunakan sebagai antarmuka antara dua motor DC dengan piranti mikrokontroler secara aman. IC L298N memiliki spesifikasi yaitu dapat mengendalikan 2 motor DC dan mampu menangani arus hingga 2 ampere untuk setiap motor (lihat gambar 2.26).
Gambar 2.26 (a) Bentuk fisik IC driver L298N.
(b) Skema rangkaian di dalam IC driver L298N.
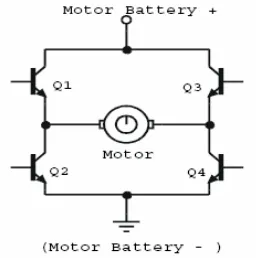
Gambar 2.27 Rangkaian dasar jembatan-H transistor NPN.
Untuk menggerakkan motor dengan arah CW, transistor Q1 dan Q4 perlu diaktifkan dengan memberi logika 1. Dengan demikian, akan terjadi aliran arus melalui Q1 melewati motor dan Q4 menuju ground. Sedangkan untuk arah CCW, maka transistor Q2 dan Q3 perlu diaktifkan dengan memberi logika 1. Dengan demikian, akan terjadi aliran arus melalui Q3 melewati motor dan Q2 menuju ground.
Tabel 2.5 Tabel kebenaran jembatan-H transistor NPN
CW CCW Stop
Q1 1 0 0
Q2 0 1 0
Q3 0 1 0
Q4 1 0 0
2.11
Konsep Gerak Melingkar
Sebuah mobile robot akan bergerak melingkar apabila kecepatan putar antara kedua roda tidak sama. Robot akan bergerak melingkar ke kanan bila roda kiri bergerak lebih cepat dibandingkan dengan roda kanan. Sebaliknya, apabila roda kanan bergerak lebih cepat dibandingkan dengan roda kiri, maka robot akan bergerak melingkar ke kiri. Robot akan membentuk sebuah lintasan pola lingkaran apabila gerak melingkar pada robot memiliki kecepatan yang konstan. Artinya roda kiri memiliki kecepatan sebesar V1
dan roda kanan memiliki kecepatan sebesar V2.
Robot harus bergerak dengan kecepatan putar roda sebesar V1 dan V2
tertentu. Hubungan kecepatan putar roda dengan radius belok robot untuk membentuk lintasan pola lingkaran ditunjukkan dengan gambar 2.28 berikut.
Gambar 2.28 Radius belok pada robot terhadap titik pusat belok O.
Keterangan untuk gambar 2.26 adalah : S1 = lintasan roda 1
S2 = lintasan roda 2
d = jarak antara roda 1 dengan roda 2 L = radius belok terhadap titik pusat O.
Bila diketahui rumus untuk,
• keliling S = θ.L
S1 = θ.L ...(2-10)
S2 = θ.(L-d) ...(2-11)
• kecepatan V =
t S
V1 =
t S1
...(2-12)
V2 =
t S2
...(2-13)
Dalam hal ini, besar sudut θ= θ1 = θ2 ,
persamaan (2-10) dan persamaan (2-11) dapat dituliskan menjadi
d L
S L S
−
= 2
1
dengan memasukkan persamaan (2-12) dan persamaan (2-13), maka
d L
t V L
t V
−
= .
. 2
(L-d).V1 = L.V2
d V V
V L
2 1
1
−
= ...(2-14)
Persamaan (2-14) yang didapat memiliki arti bahwa radius belok (L) adalah jarak antara roda terluar robot terhadap titik pusat O. Bila robot dilengkapi dengan alat tulis yang diletakkan tepat ditengah-tengah dimensi robot, maka dengan membentuk lintasan pola lingkaran, jari-jari lingkaran yang didapat adalah :
R = L – ½.d ...(2-15)
Dari persamaan (2-15) yang didapat, diketahui bahwa untuk membentuk lintasan pola lingkaran dengan panjang jari-jari (R), sebuah mobile robot
yang mempunyai jarak kedua roda (d) harus bergerak dengan kecepatan roda 1 sebesar V1 dan kecepatan roda 2 sebesar V2.
2.12
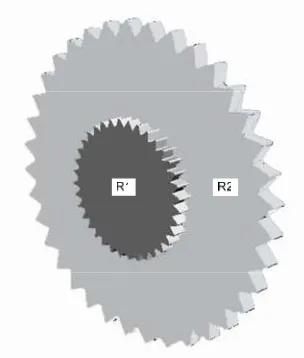
Mekanik Roda Gigi
Roda gigi satu sumbu R1 dan R2 seperti pada gambar 2.29, memiliki persamaan arah putar dan sudut yang sama. Tetapi roda gigi ini mempunyai jari-jari lingkar yang berbeda antara lingkar kecil R1 dan lingkar besar R2, sehingga jarak tempuh antara lingkar R1 dengan R2 berbeda dan torsi yang diperoleh juga berbeda.
Untuk roda kecil sebagai penggerak dan roda besar yang digerakkan, maka berlaku persamaan :
1
1 2
2
τ
τ
D
D
=
( Nm ) ...(2-16)keterangan : D1 = diameter roda gigi 1 τ1 = torsi roda gigi 1
D2 = diameter roda gigi 2 τ2 = torsi roda gigi 2
Roda gigi beda sumbu R1 dan R2 seperti pada gambar 2.30, memiliki persamaan kecepatan sudut dan torsi yang sama. Perbedaannya terletak pada arah putar yang berlawanan. Bila jari-jari antara roda gigi 1 dan roda gigi 2 berbeda, maka akan dihasilkan perbedaan kecepatan putar antara keduanya. Hal ini disebabkan karena berbedanya jarak tempuh masing-masing roda untuk satu lingkaran penuh. Jika roda kecil R1 sebagai penggerak, maka roda besar R2 akan memiliki kecepatan lebih lambat dalam berputar. Sebaliknya, jika roda besar R2 sebagai penggerak, maka roda kecil R1 akan memiliki kecepatan lebih cepat dalam berputar.
Gambar 2.30 Roda gigi beda sumbu.
Hubungan roda gigi 1 dengan roda gigi 2 dapat ditunjukkan dengan persamaan :
1 2 1
2 ω
ω
D D
= ( rad/detik ) ...(2-17)
keterangan : D1 = diameter roda gigi 1 ω1 = kecepatan sudut roda gigi 1
2.13
Teori Energi Pada Baterai
Sebuah mobile robot memerlukan suatu sistem daya, dan sumber daya yang ada harus mampu memberikan energi yang cukup agar robot dapat bekerja secara maksimal. Baterai adalah solusi umum yang digunakan pada
mobile robot untuk masalah penyimpanan energi. Sebuah baterai memiliki kapasitas penyimpanan energi yang secara praktiknya biasa diungkapkan dalam satuan amp-hours atau milliamp-hours. Besaran ini sebenarnya adalah sama dengan coulomb, unit untuk pengisian. Untuk mendapatkan energi, nilai amp-hours harus dikali dengan tegangan dari baterai, seperti ditunjukkan pada persamaan (2-18).
W = V x I x
t
(Joule) ...(2-18)Dengan demikian, energi merupakan kemampuan memberikan daya (power)
selama kurun waktu
t
, atau dinyatakan dengan watt-detik.Bila sebuah baterai memiliki energi tersimpan sebesar W, maka secara teori dapat ditentukan perkiraan umur atau life-time dari baterai dengan menggunakan persamaan (2-19).
t = I V
W
× (detik) ...(2-19)
Ini berarti bahwa penggunaan arus sebesar ( I ) pada tegangan baterai ( V ), akan mempengaruhi lamanya umur atau life-time pada baterai yang memiliki energi tersimpan sebesar W. Semakin besar arus ( I ) yang terbuang, maka
life-time dari baterai akan menjadi semakin kecil.
2.14
Derajat Simpangan dengan Fungsi Trigonometri
Sebuah mobile robot dapat membuat suatu lintasan garis dengan cara menandai jejak menggunakan pena penulis. Apabila sebuah mobile robot
Gambar 2.31 Bentuk lintasan garis yang melengkung.
<