BAB II
KAJIAN PUSTAKA 2.1 Lansia
2.1.1 Definisi
Usia lanjut adalah suatu tahap akhir dari siklus kehidupan manusia dan merupakan bagian dari proses kehidupan yang tidak dapat dihindarkan dan akan dialami oleh setiap individu. Berdasarkan kriteria Badan Kesehatan Dunia (WHO) membagi batasan usia lansia menjadi: kelompok usia 45 – 59 tahun sebagai usia pertengahan (middle elderly), kelompok usia 60 – 74 tahun disebut lansia (elderly), kelompok usia 75 – 90 tahun disebut tua (old), dan usia di atas 90 tahun disebut sangat tua (very old). Berdasarkan UU No. 13 Tahun 1998 menyatakan bahwa lanjut usia adalah seseorang yang telah mencapai usia 60 tahun ke atas (Rohana, 2011).
Penurunan anatomik dan fungsi organ lebih tepat jika tidak dikaitkan ke dalam umur kronologik akan tetap dengan umur biologiknya. Dengan kata lain, mungkin seseorang dengan usia kronologik baru mencapai usia dewasa akhir, tetapi sudah menunjukkan berbagai penurunan anatomik dan fungsional yang nyata akibat umur biologiknya yang sudah lanjut sebagai akibat tidak baiknya faktor nutrisi, pemeliharaan kesehatan, dan kurangnya aktivitas. Menua adalah proses menghilangnya secara perlahan kemampuan jaringan untuk memperbaiki diri atau mengganti diri dan mempertahankan struktur dan fungsi normalnya sehingga tidak dapat bertahan terhadap paparan dan memperbaiki kerusakan yang diderita (Darmojo dan Matono, 2009).
2.1.2 Proses Menua
Proses menua adalah suatu proses menghilangnya secara perlahan-lahan kemampuan jaringan untuk memperbaiki diri atau mengganti dan mempertahankan fungsi normalnya sehingga tidak dapat bertahan terhadap infeksi dan memperbaiki kerusakan yang diderita. Proses menua merupakan proses yang berlanjut secara alamiah, dimulai sejak lahir dan umunya dialami oleh semua makhluk hidup.
Dampak yang ditimbulkan dari proses menua antara lain adanya perubahan morfologis pada otot yang menyebabkan perubahan fungsional otot yaitu terjadi penurunan kekuatan dan kontraksi otot, elastisitas dan fleksibilitas otot, penurunan fungsi proprioseptif serta kecepatan, gangguan sistem vestibular, visual dan waktu reaksi (Nitz dan Choy 2004).
2.1.3 Epidemiologi Gangguan Keseimbangan pada Lansia
Gangguankeseimbangan postural merupakan hal yang sering terjadi pada lansia. Apabila keseimbangan postural lansia tidak terkontrol, maka akan dapat meningkatkan resiko jatuh. Faktor risiko jatuh pada lansia meliputi faktor intrinsik (host) dan faktor ekstrinsik (environmental). Faktor intrinsik terdiri dari: permasalahan keseimbangan dan berjalan, kelemahan otot, riwayat jatuh sebelumnya, penggunaan alat bantu, permasalahan penglihatan, radang sendi, depresi, permasalahan kognitif, serta usia lebih dari 80 tahun. Faktor ekstrinsik meliputi: penggunaan alas kaki yang tidak tepat, permukaan lantai yang licin atau kasar, pencahayaan yang kurang, serta banyaknya hambatan yang terdapat pada lingkungan (Rubenstein dan Josephson 2002).
Setiap tahunnya terdapat satu per tiga lansia di dunia yang berumur di atas 65 tahun mengalami jatuh. Angka ini cenderung meningkat seiring dengan bertambahnya usia. Jatuh dan osteoporosis secara bersamaan mengakibatkan terjadinya fraktur panggul pada lansia. Sebanyak 38% lansia yang jatuh dan dirawat di rumah sakit mengalami fraktur panggul dan 90% kejadian fraktur panggul dialami oleh lansia berumur 70 tahun ke atas (British Columbia, 2004). Sekitar satu per empat kematian di AS disebabkan oleh jatuh dan terjadi pada 13% populasi lansia yang berusia di atas 65 tahun. Sekitar 30-73% lansia yang mengalami jatuh cenderung akan terjadi jatuh yang berulang. Jatuh yang berulang menjadi alasan utama ketergantungan lansia pada lingkungan sekitar.Efek panjang yang dirasakan lansia yaitu berkurangnya rasa percaya diri, depresi, hingga terisolasi secara sosial (Josephson dan Rubenstein, 2006).
2.1.4 Proses Penurunan Keseimbangan pada Lansia
Penurunan keseimbangan pada lansia disebabkan oleh berbagai macam faktor di antaranya adalah adanya gangguan pada sistem sensorik, gangguan pada sistem saraf pusat (SSP), maupun adanya gangguan pada sistem muskuloskeletal.Informasi mengenai posisi tubuh terhadap lingkungan atau gravitasi diberikan oleh sistem sensorik, sedangkan sistem saraf pusat berfungsi untuk memodifikasi komponen motorik dan sensorik sehingga stabilitas dapat dipertahankan melalui kondisi yang berubah-rubah.Gangguan pada sistem sensorik meliputi gangguan pada sistem visual, vestibular, dan somatosensoris (Suadnyana, 2013).
Sistem visual seperti sistem organ lain mengalami degenerasi karena proses penuaan. Pada sistem visual lansia, terjadi penebalan jaringan fibrosa dan atrofi serabut saraf, berkurangnya sel-sel reseptor di retina, serta perubahan elastisitas lensa dan otot siliaris.Penurunan fungsi visual tersebut, menyebabkan masalah dalam persepsi bentuk dan kedalaman serta informasi visual mengenai posisi tubuh yang diperlukan untuk kontrol postural (Barnedhet al., 2006).
Sistem lain yang mengalami penurunan fungsi adalah sistem vestibular. Perubahan degeneratif tersebut mengenai organ vestibular seperti: otolith, epithelium sensorik dan sel rambut, nervus vestibularis, dan serebelum. Makula secara progresif mengalami demineralisasi dan menjadi terpecah-pecah.Hal ini mengakibatkan penurunan kemampuan dalam menjaga respon postural terhadap gravitasi dan pergerakan linear. Selain itu terjadi pula atrofi sel rambut disertai pembentukan jaringan parut dan setelah usia di atas 70 tahun terjadi penurunan sebanyak 20% jumlah sel rambut di makula dan 40% di krista ampularis kanalis semisirkularis (Barnedhet al., 2006).
Sistem somatosensori memberikan informasi tentang posisi tubuh dan kontak dari kulit melalui tekanan, taktil sensor, getaran,serta proprioseptor sendi dan otot. Sensasi kulit melalui sentuhan, getaran dan tekanan sensor penting dalam setiap aktivitas sehari-hari, terutama yang melibatkan gerakan. Sensitivitas kulit berkurang dengan bertambahnya usia. Kurangnya masukan dari taktil, tekanan dan getaran reseptor membuatnya sulit untuk berdiri atau berjalan dan mendeteksi perubahan dalam pergeseran, yang penting dalam menjaga keseimbangan (Suadnyana, 2013).
Lansia juga mengalami penurunan dalam kemampuan motorik.Hal ini berhubungan dengan penurunan terhadap kontrol neuromuskular, perubahan sendi, dan struktur lainnya. Menurunnya sistem muskuloskeletal berpengaruh terhadap keseimbangan tubuh lansia karena terjadinya atropi otot yang menyebabkan penurunan kekuatan otot, terutama ekstremitas bawah, sehingga menyebabkan langkah kaki lansia menjadi lebih pendek, jalan menjadi lebih lambat, tidak dapat menapak dengan kuat dan cenderung mudah goyah, serta ada kecenderungan untuk tersandung. Hal ini mengakibatkan lansia menjadi kurang percaya diri dan lebih berhati-hati dalam berjalan.Penurunan kekuatan otot pelvis dan tungkai juga menjadi faktor kontribusi bagi penurunan respon postural tersebut.Secara bersamaan, hampir seluruh gerakan menjadi tidak elastis dan halus.Gangguan motorik ini utamanya disebabkan oleh mulai hilangnya neuron-neuron di medulla spinalis, otak, dan serebelum (Siti, 2009). Oleh karena itu, penurunan fungsi setiap sistem pada lansia akan menyebabkan penurunan pada keseimbangan.
2.2 Keseimbangan
2.2.1 Pengertian Keseimbangan
Keseimbangan adalah kemampuan untuk mempertahankan keseimbangan tubuh ketika ditempatkan dalam berbagai posisi (Dellito, 2003).Keseimbangan juga dapat diartikan sebagai kemampuan relatif untuk mengontrol pusat masa tubuh (center of mass) atau pusat gravitasi (center of gravity) terhadap bidang tumpu (basse of support) (Indriaf, 2010).
Menurut Ann Thomson, keseimbangan adalah mampu mempertahankan posisi tubuh dalam posisi statis atau dinamis, serta menggunakan aktivitas otot yang minimal. Keseimbangan tubuh merupakan kemampuan manusia untuk mencapai dan mempertahankan postur tubuh tetap tegak melawan gravitasi dan juga untuk mengatur seluruh keterampilan aktivitas fisik (Potter dan Perry, 2005). Jadi keseimbangan tubuh adalah kemampuan tubuh untuk mempertahankan posisi tubuh agar tetap seimbang baik dalam posisi diam (statis) atau bergerak (dinamis) dengan mengatur pusat gravitasi terhadap bidang tumpu.Keseimbangan tubuh dibagi menjadi dua yaitu keseimbangan statis dan dinamis.Keseimbangan statis adalah kemampuan tubuh untuk dapat menjaga keseimbangan tubuhnya pada suatu posisi diam dan selama waktu tertentu, misalnya saat diam dan berdiri. Sedangkan, keseimbangan dinamis adalah kemampuan tubuh untuk dapat menjaga keseimbangan tubuhnya pada saatbergerak, misalnya saat berjalan, berlari, dan bangkit berdiri dari posisi duduk (Sugiarto, 2005).Tujuan tubuh mempertahankan keseimbangan adalah menyangga tubuh melawan gravitasi dan faktor eksternal lain, untuk mempertahankan pusat massa tubuh agar sejajar dan seimbang dengan bidang tumpu, serta menstabilisasi bagian tubuh ketika bagian tubuh lain bergerak (Irfan, 2010). Sistem muskuloskeletal dan bidang tumpu akan mendukung berbagai gerakan di setiap segmen tubuh untuk terciptanya keseimbangan. Adanya kemampuan menyeimbangkan antara massa tubuh dengan bidang tumpu akan membuat manusia mampu untuk beraktivitas secara efektif dan efisien (Abrahamova dan Hlavacka, 2008).
Keseimbangan bukanlah kualitas yang terisolasi, namun mendasari kapasitas kita untuk melakukan berbagai kegiatan yang merupakan kehidupan kegiatan normal sehari-hari (Huxham et al., 2001).
Keseimbangan merupakan kemampuan relatif untuk mengontrol pusat gravitasi (center of gravity) atau pusat massa tubuh (center of mass) terhadap bidang tumpu (base of support). Pusat gravitasi (center of gravity) adalah suatutitik dimana massa dari suatu obyek terkonsentrasi berdasarkan tarikan gravitasinya. Agar dapat menjaga keseimbangan, pusat gravitasi tersebut harus berpindah untuk mengompensasi gangguan yang dapat menyebabkan orang kehilangan keseimbangannya (Barnedh, 2006).
Keseimbangan melibatkan berbagai gerakan di setiap bagian tubuh dan didukung oleh sistem muskuloskeletal serta bidang tumpu. Tujuan tubuh mempertahankan keseimbangan, yaitu untuk menyangga tubuh melawan gaya gravitasi dan faktor eksternal lain, untuk mempertahankan pusat massa tubuh agar sejajar dan seimbang dengan bidang tumpu, serta menstabilkan bagian tubuh ketika tubuh lain bergerak (Irfan, 2012). Kemampuan untuk menyeimbangkan massa tubuh dengan bidang tumpu akan membuat manusia mampu untuk beraktivitas secara efektif dan efesien (Yuliana, 2014).
2.2.2 Keseimbangan Dinamis
Keseimbangan Dinamis adalah kemampuan untuk mempertahankan posisi tubuh dimana (COG) selalu berubah, contoh saat berjalan (Batson, 2009). Keseimbangan dinamis adalah pemeliharaan keseimbangan tubuh dalam posisi bergerak (Nala, 2011). Dalam kehidupan sehari-hari keseimbangan statis dan
dinamis saling berkaitan dan mutlak tidak dapat dipisahkan karena tubuh manusia jarang sekali dalam keadaan diam sempurna tanpa melakukan gerakan sama sekali. Tubuh secara berkesinambungan melakukan pengaturan postur yang tidak dapat dirasakan secara dasar .
Keseimbangan merupakan interintegrasi yang kompleks dari sistem sensorik (vestibular, visual, dan somatosensory termasuk proprioceptor) dan muskuloskeletal (otot, sendi, dan jaringan lunak lain) yang diatur dalam otak sebagai respon terhadap perubahan kondisi internal dan eksternal. Bagian otak yang mengatur meliputi basal ganglia, cerebellum, area asosiasi (Batson, 2009).
Equilibrium adalah sebuah bagian penting dari pergerakan tubuh dalam menjaga tubuh tetap stabil sehingga manusia tidak jatuh walaupun tubuh berubah posisi. Dinamis Equilibrium adalah kemampuan tubuh untuk mempertahankan posisi pada waktu bergerak. Keseimbangan bukanlah kualitas yang terisolasi, namun mendasari kapasitas kita untuk melakukan berbagai kegiatan yang bmerupakan kehidupan kegiatan normal sehari-hari (Huxham et al., 2001).
Pada posisi berdiri seimbang, susunan saraf pusat berfungsi untuk menjaga pusat gravitasi dalam keadaan stabil dengan batas bidang tumpu tidak berubah kecuali tubuh membentuk batas bidang tumpu lain misalnya melangkah. Pengontrol keseimbangan pada tubuh manusia terdiri dari tiga komponen penting, yaitu sistem informasi sensorik (visual, vestibular dan somatosensoris), central processing dan efektor (Army, 2012).
Pada saat berdiri dinamis sistem visual berperan dalam berfungsi sebagai kontrol keseimbangan, pemberi informasi, serta memprediksi datangnya
gangguan.Bagian vestibular berfungsi sebagai pemberi informasi gerakan dan posisi kepala ke susunan saraf pusat untuk respon sikap dan memberi keputusan tentang perbedaan gambaran visual dan gerak yang sebenarnya. Masukan (input) proprioseptor pada sendi, tendon dan otot di kulit telapak kaki juga merupakan hal penting untuk mengatur keseimbangan saat berdiri statis maupun dinamik (Army, 2012).
Sistem saraf pusatberfungsi untuk memetakan lokasi titik gravitasi, menata respon sikap, serta mengorganisasikan respon dengan sensorimotor.Selain itu, efektor berfungsi sebagai perangkat biomekanik untuk merealisasikan renspon yang telah terprogram di pusat, yang terdiri dari unsur lingkup gerak sendi, kekuatan otot, sikap, serta stamina (Army, 2012).
Pada saat berdiri tegak, hanya terdapat gerakan kecil yang muncul dari tubuh, yang biasa disebut dengan ayunan tubuh.Jumlah ayunan tubuh ketika berdiri tegak dipengaruhi oleh faktor posisi kaki dan lebar dari bidang tumpu (Nugroho, 2011). Posisi tubuh ketika berdiri dapat dilihat kesimetrisannya dengan : kaki selebar sendi pinggul, lengan di sisi tubuh, dan mata menatap ke depan. Walaupun posisi ini dapat dikatakan sebagai posisi yang paling nyaman, tetapi tidak dapat bertahan lama, karena seseorang akan segera berganti posisi untuk mencegah kelelahan (Yuliana, 2014).
Keseimbangan dinamis dalam kehidupan sehari – hari merupakan hal yang tidak dapat dipisahkan secara mutlak karena manusia jarang sekali dalam keadaan diam yang sempurna tanpa bergerak sama sekali (Setiati, 2006).
Keseimbangan tercipta apabila terdapat integritas antara tiga sistem sensorik (visual, vestibular, dan proprioseptif), sistem saraf pusat sebagai unit pemroses (central processing), serta sistem neuromuskuloskeletal sebagai efektor melalui respon motorik untuk merespon perubahan gravitasi, pergerakan linear atau angular, dan perubahan lingkungan.
Sistem proprioseptif memiliki peranan dalam menjaga keseimbangan postural dan memiliki hubungan dengan traktus spinoserebralis posterior dan anterior.Traktus ini membawa informasi proprioseptif dan postural dari ekstremitas bawah.Sinyal-sinyal yang dijalarkan dalam traktus spinoserebralis posterior terutama berasal dari kumparan otot dan sebagian kecil berasal dari reseptor somatik di seluruh tubuh, seperti organ tendon Golgi, reseptor taktil yang besar pada kulit, dan reseptor-reseptor sendi. Semua sinyal ini memberitahu serebelum tentang bagaimana keadaan (1) kontraksi otot, (2) derajat ketegangan tendon otot, (3) posisi dan kecepatan gerakan bagian tubuh, dan (4) kekuatan kerja pada permukaan tubuh (Guyton dan Hall, 2008). Traktus ini kemudian naik di medulla spinalis ipsilateral masuk ke pedunkulus serebelum inferior dan berakhir di serebelum.Traktus spinoserebralis anterior menerima masukan somatosensorik dari batang tubuh dan ekstremitas atas, masuk ke radiks dorsalis, traktus tersebut menyilang dan naik ke serebelum melalui pedunkulus serebelum superior.Traktus ini membawa informasi proprioseptif dari batang tubuh dan ekstremitas atas dan sebagian kecil ekstremitas bawah (Barnerdhet al., 2006).
Batang otak juga memiliki sistem dalam mengatur gerakan seluruh tubuh dan keseimbangan.Sistem keseimbangan postural melibatkan nuklei retikular
pontin dan nuklei retikular medular. Kedua rangkaian ini berfungsi secara antagonistik satu sama lain dimana nuklei retikular pontin akan merangsang otot-otot antigravitasi dan nuklei retikular medular berfungsi untuk merelaksasi otot yang sama (Guyton dan Hall, 2008).
Nuklei retikular pontin menjalarkan sinyal eksitasi menuju medula melalui traktus retikulospinal pontin pada kolumna anterior medula spinalis. Serabut-serabut dari jaras ini berakhir pada neuron-neuron motorik bagian medial dan anterior yang merangsang otot-otot aksial tubuh yang berfungsi untuk melawan gravitasi, meliputi: otot-otot kolumna vertebra dan otot-otot ekstensor dari anggota tubuh. Sebaliknya nuklei retikular medular menjalarkan sinyal inhibitorik ke neuron-neuron motorik anterior antigravitasi yang sama melalui traktus yang berbeda, yaitu traktus retikulospinal medula yang terletak pada kolumna lateralis medula spinalis.Nuklei retikular medular menerima input kolateral yang kuat dari traktus kortikospinal, traktus rubrospinal, dan jaras motorik lainnya dan secara normal semua sistem ini mengaktifkan sistem inhibitorik retikular medular untuk memberikan umpan balik sinyal eksitasi dari sistem retikular pontin, sehingga dalam keadaan normal, otot-otot tidak tegang secara abnormal (Guyton dan Hall, 2008).
Seluruh nuklei vestibular, fungsinya berkaitan dengan nuklei retikular pontin untuk mengatur otot-otot antigravitasi.Nuklei vestibular menjalarkan sinyal eksitasi yang kuat ke otot-otot antigravitasi melalui traktus vestibulospinalis medialis dan lateralis dalam kolumna anterior medulla spinalis.Peran spesifik dari nuklei vestibular adalah untuk mengatur secara selektif sinyal-sinyal
eksitatorik dari berbagai otot antigravitasi untuk menjaga keseimbangan sebagai responnya terhadap sinyal dari apparatus vestibular (Guyton dan Hall,2008).Traktus vestibulospinalis lateralis mendapatkan informasi lewat macula (utrikulus dan sakulus) dan berperan dalam percepatan linear.Pada waktu gerakan percepatan linear tersebut terjadi eksitasi neuron motorik ekstensor dan inhibisi neuron motorik fleksor.Sedangkan traktus vestibulospinalis medial menjalar ke medulla spinalis servikal dan torakal atas fasikulus longitudinalis medial.Traktus vestibulospinalis medial terutama berfungsi mengatur refleks vestibulospinal untuk stabilisasi kepala dan mata, traktus ini menghubungkan kanalis semisirkularis ke neuron motorik servikalis yang menginervasi otot-otot leher (Barnerdhet al., 2006).
Jika seseorang berdiri di atas permukaan yang tidak bergerak dengan lapang visual yang stabil, maka input visual dan somatosensorik mendominasi kontrol orientasi dan keseimbangan karena mereka merupakan sistem keseimbangan yang lebih sensitif dari sistem vestibular terhadap perubahan posisi tubuh yang halus. Sistem somatosensorik khususnya proprioseptif lebih sensitif terhadap perubahan cepat dari orientasi tubuh, sedangkan sistem visual lebih sensitif terhadap perubahan posisi yang lebih lambat.Sedangkan bila seseorang berdiri di atas permukaan yang bergerak atau miring, otot-otot batang tubuh dan ekstremitas bawah berkontraksi dengan cepat untuk mengembalikan pusat gravitasi tubuh ke posisi seimbang.Dalam hal ini yang berperan adalah sistem proprioseptif dan vestibular.Sistem vestibular terutama berperan dalam perubahan posisi yang
lambat. Sedangkan perubahan posisi yang cepat terutama dikompensasi oleh sistem proprioseptif (Barnerdhet al.s, 2006).
2.2.4 Komponen-komponen Pengontrol Keseimbangan 2.2.4.1 Sistem Informasi Sensoris
a. Sistem Visual
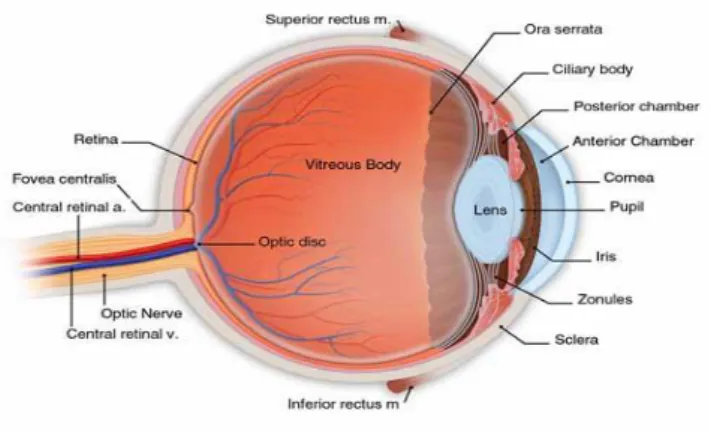
Penglihatan merupakan sumber utama informasi tentang lingkungan dan penglihatan berperan dalam mengidentifikasi dan mengatur jarak sesuai dengan tempat kita berada.Penglihatan muncul ketika mata menerima sinar yang berasal dari obyek sesuai jarak pandang (Irfan, 2012).Sistem visual juga memberikan informasi mengenai posisi kepala, penyesuaian kepala untuk mempertahankan penglihatan, dan mengatur arah serta kecepatan pergerakan kepala karena ketika kepala bergerak, objek sekitar berpindah dengan arah berlawanan (Colby dan Kisner, 2007). Masukan reseptor visual berperan penting terutama pada landasan penunjang yang tidak stabil, misalnya pada saat bertumpu pada tumit, goyangan anteroposterior pada tubuh akan berkurang pada saat mata terbuka dibandingkan dengan mata tertutup (Sugiarto, 2005). Gambar anatomi mata disajikan pada Gambar 2.1.
Gambar 2.1 Sistem Visual Sumber: anonim, 2009
Sistem visual memegang peranan penting dalam menjaga keseimbangan.Sekitar dua puluh persen serabut saraf dari mata berinteraksi dengan sistem vestibular. Gangguan visual yang dapat menyebabkan gangguan keseimbangan, di antaranya:
- aneisokonia adalah perbedaan kemampuan magnifikasi atau pembesaran dan pembentukan bayangan di retina pada mata kanan dan kiri,
- anisometropia adalah keadaan di mana terdapat perbedaan refraksi yang signifikan antara ke dua mata (perbedaan 10 Dioptri),
- diplopia(double vision) adalah keadaan melihat bayangan ganda akibat sumbu ke dua mata tidak parallel,
- gangguan fungsi binocular vision, yaitu gangguan dalam mengordinasikan ke dua mata sebagai satu kesatuan dalam aspek konvergensi dan divergensi dengan aspek akomodasi,
- sertastrabismus yaitu gangguan aligment mata kanan dan kiri (Sugiarto, 2005).
b. Sistem Vestibular
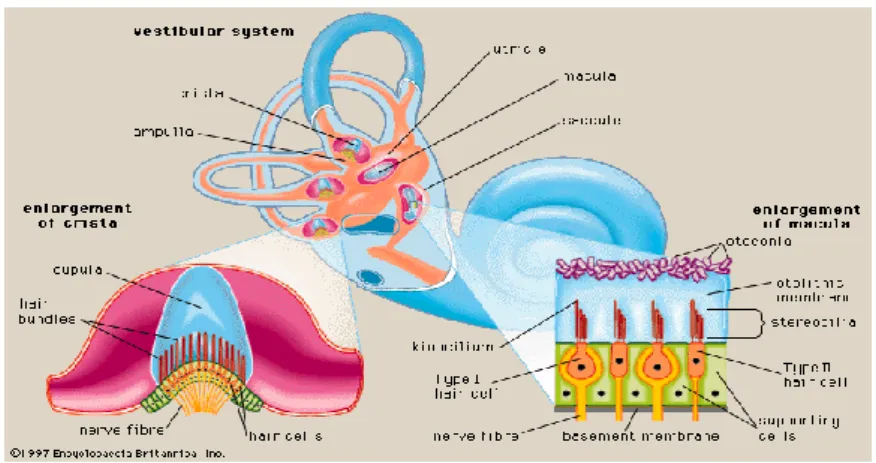
Aparatus vestibular merupakan organ sensoris untuk mendeteksi sensasi keseimbangan.Alat ini terbungkus di dalam labirin tulang.Dalam sistem ini terdapat tabung membran dan ruangan yang disebut labirin membranosa dan merupakan bagian fungsional dari apparatus vestibular. Labirin membranosa terdiri atas: koklea (duktus koklearis), tiga kanalis seminiverus, dan ruangan besar yaitu, utrikulus dan sakulus.Koklea merupakan organ sensorik utama pendengaran dan tidak berhubungan dengan keseimbangan.Kanalis seminiverusbertanggung jawab terhadap keseimbangan dinamis, yaitu keseimbangan saat tubuh sedang bergerak seperti berjalan atau dalam keadaan tidak seimbang (tersandung atau tergelincir), sedangkan fungsi dari utrikulus dan sakulus sebagai penjaga keseimbangan statis tubuh, yaitu berperan dalam kontrol postur dan monitoring kepala (Guyton dan Hall, 2008).Pada permukaan dalam utrikulus dan sakulus terdapat daerah sensorik kecil yang disebut sebagai makula.Makula pada utrikulus berperan penting dalam menentukan orientasi kepala ketika kepala dalam posisi tegak, sebaliknya makula pada sakulus memberikan sinyal orientasi kepala saat seseorang sedang berbaring.Anatomi sistem vestibular dijabarkan pada Gambar 2.2.
Gambar 2.2 Sistem Vestibular Sumber: Hidayat, 2008
Setiap makula ditutupi oleh lapisan gelatinosa yang dilekati oleh kristal kalsium karbonat kecil yang disebut statokonia. Dalam makula, juga terdapat beribu-ribu sel rambut dan akan menonjolkan silia ke dalam lapisan gelatinosa tersebut. Setiap sel rambut mempunyai 50 sampai 70 silia kecil yang disebut stereosilia, ditambah satu silium besar yang disebut kinosilium.Perlekatan filamentosa yang tipis, menghubungkan ujung setiap stereosilium dengan strereosilum selanjutnya yang lebih panjang dan pada akhirnya ke kinosilium. Apabila stereosilia melekuk ke arah kinosilium pelekatan filamentosa akan menarik stereosilia berikutnya ke arah luar badan sel dan mampu menghantarkan ion positif mengalir ke dalam sel dari cairan endolimfatik di sekelilingnya sehingga menimbulkan depolarisasi membran reseptor. Sebaliknya, pelekukan stereosilia ke arah berlawanan (ke belakang kinosilium) akan menurunkan tegangan pada pelekatan dan keadaan ini mampu menutup saluran ion dan terjadilah hiperpolarisasi reseptor.
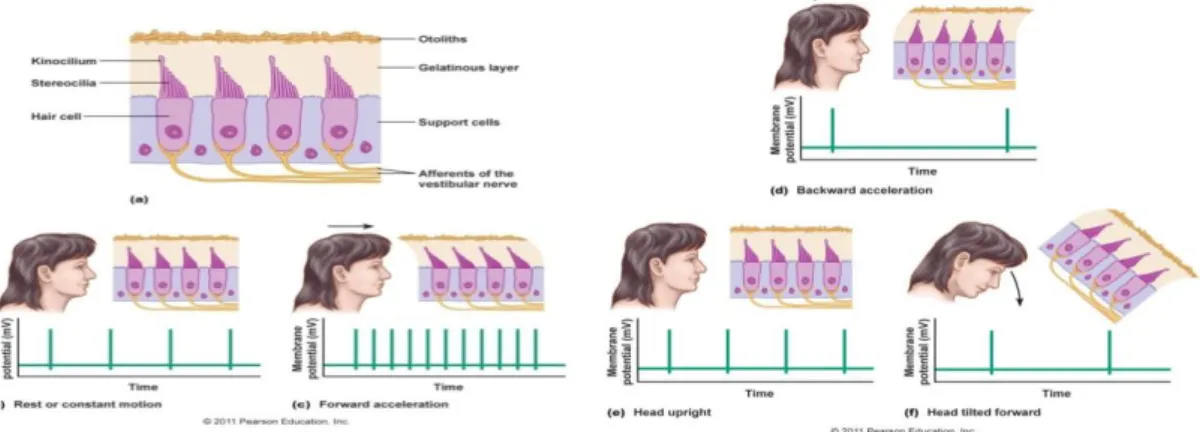
Pada setiap makula, setiap sel rambut diarahkan ke berbagai jurusan sehingga beberapa dari sel rambut dapat terangsang ketika kepala menunduk ke depan, dan yang lainnya terangsang ketika kepala menengadah ke belakang atau ketika membelok ke salah satu sisi. Pola inilah yang nantinya memberitahukan kepada otak posisi kepala dalam ruangan, seperti yang dijabarkan pada Gambar2.3.
Gambar 2.3 Sel rambut dari alat keseimbangan Sumber: Yuliana, 2014
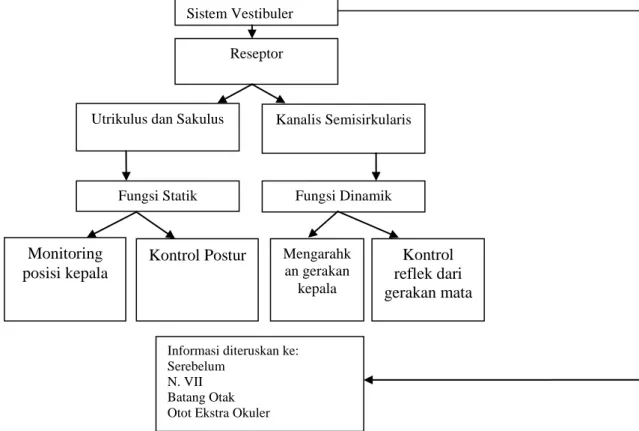
Setiap apparatus vestibularis terdapat tiga buah kanalis semisirkularis dikenal sebagai kanalis semisirkularis anterior, posterior, dan lateral (horizontal) yang tersusun tegak lurus satu sama lain, sehingga kanalis ini terdapat dalam tiga bidang. Sel-sel rambut akan menjalarkan sinyal yang sesuai ke nervus vestibularis untuk memberitahukan sistem saraf pusat mengenai perubahan perputaran kepala dan kecepatan perubahan pada setiap tiga bidang ruangan. Dengan kata lain, mekanisme kanalis semisirkularis dapat meramalkan akan terjadinya ketidakseimbangan, sehingga menyebabkan pusat keseimbangan mengadakan tindakan pencegahan antisipasi yang sesuai. Dengan cara ini, orang tidak akan
jatuh secara tak terduga sama sekali, karena sebelum terjadinya ketidakseimbangan orang itu mulai mengadakan koreksi keadaan tubuhnya (Guyton dan Hall, 2008). Mekanisme kerja sistem vestibular terhadap keseimbangan dijabarkan pada bagan Gambar 2.4.
Gambar 2.4 Mekanisme kerja sistem vestibular terhadap keseimbangan Sumber: Sugiarto, 2005
c. Sistem Somatosensorik
Somatosensorik adalah perasaan yang dirasakan pada bagian tubuh yang berasal dari somatopleura yaitu kulit, otot, tulang, dan jaringan pengikatnya.Somatosensorik tediri dari perasaan dangkal (perasa eksteroseptif), perasa dalam (perasa proprioseptif), dan perasa luhur.Somatosensorik
Sistem Vestibuler Reseptor
Utrikulus dan Sakulus
Fungsi Statik Kontrol Postur Kanalis Semisirkularis Fungsi Dinamik Monitoring posisi kepala Kontrol reflek dari gerakan mata Mengarahk an gerakan kepala
Informasi diteruskan ke: Serebelum
N. VII Batang Otak Otot Ekstra Okuler
eksteroseptif sederhana meliputi rasa nyeri, rasa suhu, dan rasa raba.Somatosensorik proprioseptif terdiri dari rasa nyeri dalam, rasa getar, rasa tekan, rasa gerak, dan rasa sikap. Somatosensorik luhur adalah perasaan yang mempunyai sifat diskriminatif dan tiga dimensional, misalnya dengan meraba, menekan, dan merasakan suhu suatu benda dengan mata tertutup, dapat menentukan benda apa yang dipegang, dari bahan apa benda itu dibuat, dan sebagainya. Susunan somatosensorik adalah perantara untuk menyadari dan merasakan rangsang dari dunia luar.Dari susunan saraf perifer, rangsangan diteruskan melalui neuron-neuron ke susunan saraf pusat yang mengolah impuls, sehingga dapat menghasilkan suatu perasaan.Impuls tersebut dinamakan impuls aferen.Ada dua jenis susunan saraf yang digunakan untuk mengalirkan impuls aferen tersebut, yaitu susunan eksteroseptif dan susunan proprioseptif (Sugiarto, 2005).
Susunan proprioseptif adalah susunan saraf yang menghantarkan impuls rasa tekan, rasa gerak, rasa sikap, rasa getar, rasa nyeri dalam, dan rasa diskriminatif. Sel neuron sistem proprioseptif mempunyai neurit dan dendrit yang hampir sama panjangnya. Informasi proprioseptif disalurkan ke otak melalui kolumna dorsalis medula spinalis. Sebagian besar masukan (input) proprioseptif menuju serebelum, tetapi ada pula yang menuju ke korteks serebri melalui lemniskus medialis dan thalamus(Willis, 2007).Macam-macam reseptor dalam sistem proprioseptif yaitu: korpus vaterpacini untuk rasa tekan, letaknya di bagian bawah kulit dan jaringan ikat, organ golgi di dalam tendon dan selaput sendi, muscle spindle ada dalam otot berfungsi sebagai stretch reseptor, piring
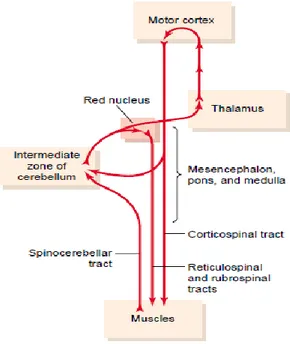
Golgi-Massoni ada dalam kulit untuk menangkap rasa tekan halus (Sugiarto, 2005). Pengaturan serebral dan sereberal terhadap gerakan voluntar yang melalui sistem somatosensorik dijabarkan pada Gambar 2.5.
Gambar 2.5 Pengaturan Serebral dan Sereberal Terhadap Gerakan Voluntar Sumber: Guyton dan Hall, 2008
2.2.4.2Central Processing
Central processing berfungsi untuk menentukan titik tumpu tubuh dan alligment gravitasi pada tubuh serta mengorganisasikan respon sensorimotor yang dibutuhkan oleh tubuh. Respon motorik yang dihasilkan oleh sistem saraf pusatberguna untukmenjaga postur tubuh agar tetap seimbang. Sistem saraf pusat menerima input sensorik, menginterpretasikan dan mengintegrasikan kemudian menghubungkan pada sistem neuromuskular untuk memberikan output motorik yang korektif sehingga mampu menciptakan keseimbangan yang baik ketika
dalam keadaan diam (statis) ataupun keadaan bergerak (dinamis). Komponen sistem saraf pusat yang terlibat dalam proses kontrol postural yaitu:corteks, thalamus,basal ganglia, nuckelus vestibular, dan cerebellum (Suadnyana, 2013).
2.2.4.3 Efektor
a. Respon otot-otot postural yang sinergis
Respon otot-otot postural yang sinergis mengarah pada waktu dan jarak dari aktivitas kelompok otot yang diperlukan untuk mempertahankan keseimbangan dan kontrol postur. Beberapa kelompok otot baik pada ekstremitas atas maupun bawah berfungsi mempertahankan postur saat berdiri tegak serta mengatur keseimbangan tubuh dalam berbagai gerakan (Irfan, 2012).
Keseimbangan pada tubuh dalam berbagai posisi hanya akan dimungkinkan jika respon dari otot-otot postural bekerja secara sinergi sebagai reaksi dari perubahan posisi, titik tumpu, gaya gravitasi, dan aligment tubuh.Kerja otot yang sinergi berarti bahwa adanya respon yang tepat (kecepatan dan kekuatan) suatu otot terhadap otot yang lainnya dalam melakukan fungsi gerak tertentu.Gerak dengan pola normal berasal dari adanya perencanaan gerak yang diimplementasikan dalam bentuk aktivasi otot dengan kekuatan dan kecepatan yang sesuai (Irfan, 2012).
b. Kekuatan otot
Kekuatan otot diperlukan saat melakukan aktivitas.Semua gerakan yang dihasilkan merupakan hasil dari adanya suatu peningkatan tegangan otot sebagai respon motorik.Kekuatan otot dapat dijabarkan sebagai kemampuan otot menahan beban baik berupa beban internal (internal force) maupun beban eksternal
(external force). Kekuatan otot sangat berhubungan dengan sistem neuromuskuler yaitu seberapa besar kemampuan sistem saraf mengaktivasi otot untuk melakukan kontraksi, sehingga semakin banyak serabut otot yang teraktivasi, maka semakin besar pula kekuatan yang dihasilkan otot tersebut (Irfan, 2012).
Kekuatan otot dari kaki, lutut serta pinggul harus adekuat untuk mempertahankan keseimbangan tubuh saat adanya gaya dari luar. Kekuatan otot tersebut berhubungan langsung dengan kemampuan otot untuk melawan gaya gravitasi serta beban eksternal lainnya yang secara berkelanjutan mempengaruhi posisi tubuh. Kemampuan otot untuk melakukan reaksi tegak dan stabil merupakan bentuk dari aktivitas otot untuk menjaga keseimbangan baik saat statis maupun dinamis.Hal tersebut dapat dilakukan apabila otot memiliki kekuatan dengan besaran tertentu (Irfan, 2012).
c. Range of Motion
Range of motion merupakan luas lingkup gerak sendi yang bisa dilakukan oleh sendi.ROM juga merupakan ruang gerak suatu kontraksi otot dalam melakukan gerakan, apakah otot tersebut memendek atau memanjang secara penuh atau tidak sehingga berpengaruh terhadap keseimbangan.ROM menentukan kemampuan sendi dalam membantu gerak tubuh dan mengarahkan gerakan terutama saat gerakan yang memerlukan keseimbangan yang tinggi, serta keterjangkauan lingkup gerak sendi untuk memenuhi kebutuhan gerak yang memungkinkan untuk seimbang (Suadnyana, 2013).
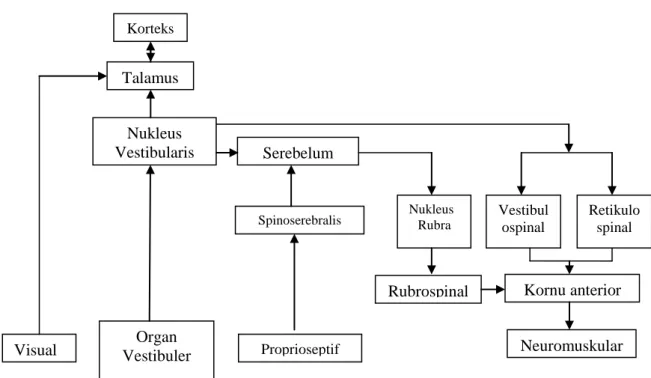
Gambar 2.6 Bagan Fisiologi Keseimbangan Sumber: Barnedh, 2006
2.2.5 Faktor - Faktor yang Mempengaruhi Keseimbangan 2.2.5.1Pusat gravitasi (Centre of Gravity-COG)
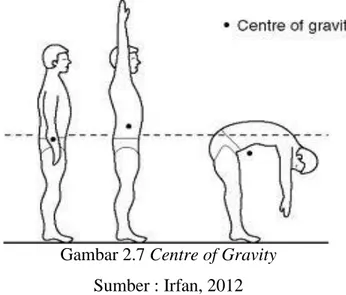
Pusat gravitasi merupakan titik utama pada tubuh yang mendistribusikan massa tubuh secara merata. Bila tubuh selalu ditopang oleh titik ini, maka tubuh dalam keadaan seimbang.Gangguan keseimbangan dapat terjadi karena adanya perubahan postur sebagai akibat dari perubahan titik pusat gravitasi.Pada manusia, pusat gravitasi berpindah sesuai dengan arah atau perubahan berat. Pusat gravitasi manusia ketika berdiri tegak adalah tepat di atas pinggang di antara depan dan belakang vertebra sakrum ke dua. Kemampuan seseorang untuk mempertahankan keseimbangan dalam berbagai bentuk posisi tubuh sangat dipengaruhi oleh kemampuan tubuh menjaga centre of gravity untuk tetap dalam area batas
Talamus Korteks Nukleus Vestibularis Organ Vestibuler Visual Serebelum Spinoserebralis Proprioseptif Nukleus Rubra Rubrospinal Vestibul ospinal Retikulo spinal Kornu anterior Neuromuskular
stabilitas tubuh (stability limit). Stability limitadalah batas dari luas area di mana tubuh mampu menjaga keseimbangan tanpa adanya perubahan tumpuan (Irfan, 2012). Pusat gravitasi tubuh dijabarkan pada Gambar 2.7.
Gambar 2.7 Centre of Gravity Sumber : Irfan, 2012
2.2.5.2Garis gravitasi (Line of Gravity-LOG)
Garis gravitasi adalah garis imajiner yang berada vertikal melalui pusat gravitasi dengan pusat bumi. Hubungan antara garis gravitasi, pusat gravitasi dengan bidang tumpu akan menentukan derajat stabilitas tubuh. Garis gravitasi pada seseorang yang sedang berdiri berjalan mulai dari prosesus mastoideus pada tulang temporal, bagian anterior sakral ke-dua, bagian posterior dari hip, dan anterior knee dan ankle,seperti yang dijabarkan pada Gambar 2.8 (Irfan, 2012).
Gambar 2.8 Line of Gravity Sumber : Irfan, 2012 2.2.5.3Bidang tumpu (Base of Support-BOS)
Bidang tumpu adalah bagian dari tubuh yang berhubungan dengan permukaan tumpuan. Ketika garis gravitasi tepat berada pada bidang tumpu, tubuh dalam keadaan seimbang. Stabilitas yang baik terbentuk dari luasnya area bidang tumpu. Semakin besar bidang tumpu, semakin tinggi stabilitas. Misalnya berdiri dengan kedua kaki akan lebih stabil dibanding berdiri dengan satu kaki.Base of Support pada gerak manusia akan memberikan reaksi pada pola gerak individu. Semakin dekat bidang tumpu dengan pusat gravitasi, maka stabilitas tubuh makin tinggi (Wen Chang, 2009). Bidang tumpu dijabarkan melalui Gambar 2.9.
Gambar 2.9 Base of Support Sumber: Irfan, 2012 2.2.6 Penyusun Keseimbangan Postural
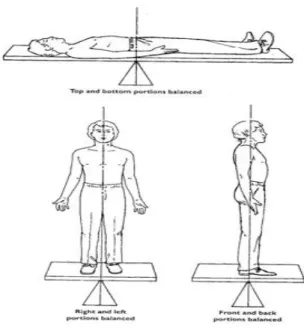
Kontrol postural tidaklah dianggap sebagai salah satu sistematauset dalam meluruskan dan mencapai keseimbangan refleks. Sebaliknya, kontrol postural dianggap sebagaiketerampilan motorik yang kompleks berasal dariinteraksi antara berbagai proses sensorimotor. Terdapat dua tujuan utama dalam kontrol postural yaitu: orientasi postural dan keseimbangan postural. Orientasi postural dipengaruhi oleh kontrol aktif alignment tubuh terhadap gravitasi, landasan penyangga, sistem visual, dan informasi internal.Orientasi spasial pada kontrol postural bergantung pada interpretasi sistem visual, vestibular, dan somatosensoris.Keseimbangan postural dipengaruhi oleh koordinasi sensorimotor untuk menstabilkan center of mass dan penjalaran eksternal pada stabilitas postural.
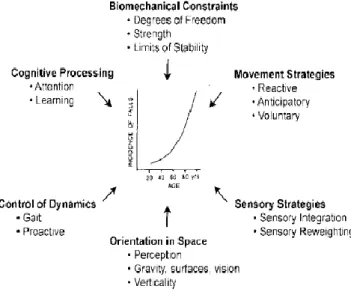
Horak (2006) menyimpulkan terdapat 6 komponen dasar penyusun sistem kontrol postural,seperti terlihat pada Gambar 2.10.Penurunan kemampuan pada
salah satu komponen dapat menyebabkan terjadinya gangguan keseimbangan dan meningkatkan kejadian jatuh pada lansia.
Gambar 2.10 Penyusun Keseimbangan Postural Sumber: Horak, 2006
2.2.6.1 Kendala Biomekanik (Biomechanical Constraints)
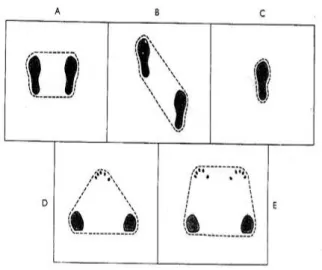
Komponen kendala biomekanik yang terpenting dalam keseimbangan adalah ukuran dan kualitas dari bidang tumpu (base of support) yaitu kaki. Keterbatasan pada ukuran, kekuatan, lingkup gerak, nyeri, atau kontrol dari kaki akan mempengaruhi keseimbangan (Tinettiet all., 1994). Pada posisi berdiri, terdapat area seperti kerucut (limit of stability) yang menjelaskan kemampuan seseorang dalam menggerakkan pusat gravitasi tubuh dan mengontrol keseimbangan tanpa merubah bidang tumpu, (McCollum dan Leen, 1989) seperti terlihat pada Gambar 2.11.
Gambar 2.11 Normal dan Abnormal Limits of Stability Sumber: Horak, 2006
Pada gambar A menunjukkan lansia pria sehat yang berusaha menggerakkan pusat gravitasi tubuh ke arah depan tanpa melewati batas stabilitas, sedangkan gambar B menunjukkan lansia wanita dengan gangguan multisensoris yang berusaha menggerakkan pusat gravitasi tubuh ke arah depan tanpa melewati batas stabilitas. Gambar C menunjukkan lansia wanita dengan gangguan multisensoris yang berusaha menggerakkan pusat gravitasi tubuh ke belakang, tetapi secara tiba-tiba mengambil langkah untuk melebarkan bidang tumpu. Secara singkat, batas stabilitas diartikan sebagai kemampuan untuk menggerakkan pusat gravitasi sejauh mungkin pada arah anteroposterior atau mediolateral tanpa memindahkan bidang tumpu (Sibley et all.,2015).
Sistem saraf pusat mengatur keadaan internal pada batas stabilitas kerucut dengan mengatur seberapa besar gerakan yang diperlukan dalam mengontrol keseimbangan.Pada sebagian besar lansia dengan defisit keseimbangan, stabilitas kerucut ini sangatlah kecil atau representasi sistem saraf pusat terhadap stabilitas kerucut mengalami penurunan (Duncan at all., 1990).
2.2.6.2 Strategi Gerakan (Movement Strategies)
Sistem saraf pusat memiliki 3 sistem untuk menjaga keseimbangan setelah tubuh mengalami perturbasi/gangguan, di antaranya: refleks regang, respon postural otomatis, dan respon volunter. Respon postural otomatis berhubungan dengan long loop reflexes yang biasanya terjadi sekitar 100-120 msec pada orang dewasa normal. Respon postural otomatis diinformasikan melalui situasi feedback dan feedforward.Feedforward mendeskripsikan mengenai pengaturan sistem saraf pusat dalam mengatur respon postural saat mengantisipasi suatu perubahan posisi tertentu.Sebagai contoh pada gerakan menangkap bola. Gerakan menangkap bola merupakan gerakan yang disadari atas perubahan pusat gravitasinya, tetapi respon postural otomatis setidaknya akan memprediksi keadaan ini dengan mengantisipasi gerakan volunteer dalam rangka menstabilisasi pusat gravitasi tubuh sehingga perubahan sikap atau gerakan terhadap stimulus yang diberikan akan menjadi akurat. Sementara, feedback berhubungan dengan situasi dimana tubuh mendapatkan gaya eksternal, seperti: tergelincir atau terdorong. Maka, pusat gravitasi tubuh berubah dan sistem saraf pusat berperan dalam mengatur respon postural untuk menyesuaikan pusat gravitasi tubuh terhadap bidang tumpu.Respon yang diberikan dapat berupa respon protektif atau respon korektif (Guccione, 2001).
Penelitian dalam bidang respon postural otomatis berfokus pada respon neurofisiologi pada perturbasi postural dalam paradigma feedback.Bentuk gerakan yang biasanya digunakan dalam menyusun perturbasi misalnya ketika pasien berdiri secara normal. Variabel primer yang dites yaitu latency (waktu dalam
melakukan respon otot) dan sequence (ketepatan gerakan respon otot). Nashner menjelaskan mengenai 3 strategi gerakan sebagai respon normal dalam mengantisipasi perturbasi postural yang tidak diinginkan. (1). Ankle Strategy digunakan pada perubahan bidang tumpu yang cukup kecil. Pada strategi ini, aktivasi otot dilakukan dari distal ke proksimal yaitu mengaktivasi otot-otot bagian ekstremitas bawah. Misalnya, saat tubuh mengalami kehilangan keseimbangan ke arah belakang, maka otot yang akan diaktivasi pertama kali yaitu m. tibialis anterior (100 msec) yang diikuti oleh m. quadriceps dan m. abdominal. Sebaliknya, apabila tubuh kehilangan keseimbangan ke arah depan maka otot yang akan diaktivasi yaitu: m. gastrocnemius, m. hamstring, dan m. paraspinal. (2). Hip Strategy terjadi ketika perturbasi besar atau pusat gravitasi tubuh mendekati limit of stability (batas stabilitas) akibat bidang tumpu yang tidak stabil. Tujuan dari strategi ini yaitu mempertahankan pusat gravitasi tubuh terhadap bidang tumpu dengan mengaktivasi tubuh bagian proksimal ke distal. Pada forward swayakan mengaktivasi m. abdominal dan m. quadriceps, sedangkan backward sway akan mengaktivasi m. paraspinal dan m. harmstring. (3). Stepping strategy terjadi saat perturbasi dalam jumlah yang sangat besar yaitu pusat gravitasi tubuh melebihi batas stabilitas. Strategi ini digunakan untuk memperbesar bidang tumpu sehingga dapat mempertahankan keseimbangan (Nashner et all., 1979).
2.2.6.3 Strategi Sensoris (Sensory Strategies)
Informasi sensoris dari somatosensori, visual, dan vestibular, harus diintegrasikan untuk menginterpretasi keadaan lingkungan.Dalam lingkungan
yang cukup terang dengan basis yang kuat dari dukungan, orang sehat mengandalkan informasi somatosensori (70%), visual (10%), dan vestibular (20%).Namun, ketika seseorang berdiri di atas permukaan yang tidak stabil, merekameningkatkan bobot sensorik untuk vestibulardan informasi visual mereka serta mengurangi ketergantungan masukan somatosensori untuk orientasi postural (Peterka, 2002).
Kemampuan untuk meningkatkan informasi bobot sensorik (re-weight sensory) bergantung pada seberapa penting konteks sensori dalam menjaga stabilitas ketika seorang individu bergerak dari satu konteks sensori ke yang lainnya. Seorang individu dengan gangguan defisit periperal pada sistem vestibular atau somatosensori (neuropati) akan mengalami keterbatasan dalam kemampuan untuk meningkatkan informasi bobot sensorik dan memiliki peluang jatuh lebih tinggi (Horak, 2006).
2.2.6.4 Orientasi dalam Ruang (Orientation in Space)
Kemampuan untuk mengarahkan bagian-bagian tubuh sehubungan dengan gravitasi, bidang tumpu, sistem visual dan referensi internal adalah komponen penting dari kontrol postural. Sistem saraf yang sehat secara otomatis mengubah cara tubuh berorientasi pada ruang, tergantung pada konteks dan tugas. Orang yang sehat dapat mengidentifikasigravitasi vertikal dalam gelap untuk jarak 0,5°.Penelitian telah menunjukkan bahwa persepsi vertikal atautegak, mungkin memiliki beberaparepresentasi saraf (Karnath et al, 2000). Persepsi vertikal visual atau kemampuan untuk menyelaraskan garis ke gravitasi vertikal dalam gelap, tidak tergantung pada persepsi postural (atau proprioseptif) vertikal; misalnya
kemampuan untuk menyelaraskan tubuh dalam ruang tanpa visual. Ketiadakakuratan referensi internal pada vertikalitas akan menghasilkan keselarasan (alignment) postural otomatis yang tidak selaras dengan gravitasi dan membuat seseorang tidak stabil (Bisdorff et al., 1996).
2.2.6.5 Kontrol Dinamik (Control of Dynamics)
Mengontrol keseimbangan selama berjalan dan ketika berpindah dari satu postur ke lainnya memerlukan kontrol yang kompleks dari pusat gravitasi tubuh. Tidak seperti dalam posisi tegak, pusat gravitasi tubuh tidak dalam basis dukungan kaki ketika berjalan atau berubah dari satu postur ke yang lain (Winter et al., 1993). Stabilitas postural ke arah depan selama berjalan datang dari ayunan ekstremitas di bawah jatuhnya pusat gravitasi. Namun, stabilitas lateral berasal dari kombinasi kontrol tubuh bagian lateral dan peletakan kaki bagian lateral (Bauby dan Kuo, 2000). Seorang lansia yang rentan terhadap jatuh cenderung memiliki penempatan lateral yang lebih besar dari pusat gravitasi tubuh serta penempatan kaki secara lateral dan tidak teratur (Prince et al., 1997).
2.2.6.6 Proses Kognitif (Cognitive Processing)
Banyak sumber daya kognitif yang diperlukan dalam kontrol postural. Bahkan berdiri diam-diam membutuhkan proses kognitif, seperti dapatdilihat oleh peningkatan waktu reaksi pada orang berdiridibandingkan dengan mereka yang duduk dengan dukungan.Semakin sulit tugas postural, semakin pengolahankognitif diperlukan. Dengan demikian, waktu reaksi dan kinerja dalam tugas kognitif menurunkan kesulitan saat tugas postural meningkat (Teasdale dan Simoneau, 2001). Karena kontrol postur dansumber lain berbagi proses kognitif,
kinerja tugas postural juga terganggu oleh tugas kognitif sekunder (Camicioli et al, 1997). Individu yang memiliki pengolahan kognitif yang terbataskarena gangguan neurologis dapat menggunakan lebih dariproses kognitif yang tersedia untuk mengendalikan postur. Jatuh merupakan hasil dari proses kognitif yang tidakcukup untuk mengontrolpostur sementara sibuk dengan tugas kognitif sekunder lainnya (Horak, 2006).
2.2.7 Resiko Jatuh Pada Lansia
Gangguan keseimbangan akan mengakibatkan resiko jatuh pada lansia (Siburian, 2006). Jatuh merupakan maslah fisik yang sering dialami oleh lansia akibat proses penuaan (Pudjastutiet al., 2003). Jatuh dapat mengakibatkan nyeri, terkilir, patah tulang, kelumpuhan, bahkan kematian. Hal ini menimbulkan rasa takut dan hilangnya rasa percaya diri sehingga lansia membatasi aktivitasnya sehari-hari yang menyebabkan menurunnya kualitas hidup (quality of life) pada lansia yang menglaminya. Penurunan kekuatan otot ektrimitas bawah dapat mengakibatkan kelambanan gerak, langkah pendek, kaki tidak dapat menapak dengan kuat dan lebih gampang goyah, sudah atau terlambat mengantisipasi bila terjadi gangguan seperti terpeleset dan tersandung. Beberapa indikator ini dapat meningkatkan resiko jatuh pada lansia (Darmojo dan Matono, 2009).
2.3 Latihan Jalan Tandem
2.3.1 Definisi Jalan Tandem
Berdasarkan sejarah jalan Tandemditemukan oleh ahli neurologis Jerman bernama Morist Heinrich Romberg (1795-1873). Latihan jalan Tandemmerupakan suatu tes dan juga latihan yang dilakukan dengan cara berjalan menentukan garis
lurus dalam posisi tumit kaki menyentuh jari kaki yang lainnya sejauh 3meter (Batson, 2009). Latihan ini dapat meningkatkan keseimbangan postural bagian lateral, yang berperan dalam mengurangi resiko jatuh pada lanjut usia. Latihan ini bertujuan untuk melatih sistem proprioseptifyaitu untuk melatih sikap atau posisi tubuh. Merupakan salah satu metode untuk menumbuhkan kebiasaan dalam mengontrol postur tubuh langkah demi langkah yang dilakukan dengan bantuan kognisi dan koordinasi otot trunk, lumbal spine, pelvic, hip, otot-otot perut hingga ankle. (Batson, 2009)
Menurut Batson (2009) latihan jalan Tandemada dua bentuk latihan yaitu latihan jalan Tandemmaju dan latihan jalan Tandemmundur. Latihan Jalan Tandembiasanya digunakan untuk tes koordinasi atau biasanya dilakukan pada tes neurologis. Hal ini berdasarkan beberapa penelitian bahwa setidaknya membutuhkan dua atau tiga indra dalam menjaga keseimbangan berdiri dan berjalan yaitu proprioseptif, vestibular, dan visual. Menjaga keseimbangan dalam posisi dinamis bergantung pada sensory pathways yang dilakukan noleh corticospinal (pyramidal) tract dan medial lateral vestibular tract. Sensori motor integration centre yang dilakukan oleh cerebellum dan dorsal collum medial lemniskus tract (Nasution, 2015).
Analisa latihan jalan Tandemdilihat dari gerakan kaki dan dimana
letak tekanan pada area telapak kaki dan cara bergerak maju. Dalam gangguan cerebellar ata kelemahan vestibulardapat menghasilkan gerakan condong ke sisi yang terkena. Gerakan-gerakan korektif kecil merupakan hal yang normal, itu menunjukkan bahwa seseorang dapat merasakan input proprioseptifyang diterima.
Gerakan yang bergoyang juga menunjukkan kesaddaran kedudukannya dalam suatu tempat (Batson, 2009)
Keuntungan latihan jalan Tandemadalah salah satu dari latihan balance exercise yang dapat melatih sikap tubuh, mengontrol keseimbangan, koordinasi otot dan garakan tubuh serta meningkatkan kekuatan otot ektrimitas inferior. Sedangkan kekurangan latihan jalan Tandemadalah gangguan cerebellar atau kelemahan vestibular dapat menghasilkan penyimpanan berjalan ke sisi yang lemah. Individu dengan gangguan vestibular atau atau kronis biasanya gagal tes atau latihan ini (Nasution, 2015).
Latihan jalan Tandemmaju sangat spesifik dan sering non localizing. Kebanyakan ahli kesehatan merasa bahwa jatuh ke salah satu sisi tidak selalu menunjukkan ke sisi lesi. Beberapa individu yang sehat mungkin mengalami kesulitan dalam melakukan latihan jalan Tandem, sehingga untuk menentukan adanya gangguan vestibular dibutuhkan tes tambahan yang lebih spesifik misalnya Time Up Go Test (TUGT) dan lain-lain(Batson, 2009).
2.3.2 Tujuan Latihan Jalan Tandem
Latihan jalan Tandemmerupakan salah satu latihan yang bertujuan melatih sikap atau posisi tubuh, mengontrol keseimbangan, koordinasi otot dan gerakan tubuh. Latihan jalan Tandemdigunakan pula untuk melatih parameter yang terkait dengan keseimbangan individu, kontrol mutlak atas mobilitas dan ketetapan mobilitas (Batson, 2009).
Latihan jalan Tandem juga digunakan sebagai tes untuk menentukan kemampuan dari individu untuk mengkoordinasikan gerakan motoriknya.
Individu dengan masalah koordinasi gerak motoriknya tidak akan lulus dalam tes ini. Dosis yang di anjurkan untuk dapat menghasilkan keseimbangan yang adekuat adalah 4 minggu(Batson, 2009).
2.3.3 Teknik Pelaksanaan Latihan Jalan Tandem
Teknik pelaksanaan Latihan Jalan Tandemmenurut Batson(2009),yaitu: a. Subyek berdiri tegak dan nyaman dengan kedua kaki
b. Pandangan subyek mengarah ke kaki
c. Latihan dimulai subyek diminta untuk berjalan maju pada jalur (satu garis lurus) dengan menempatkan kaki kanan menyentuh tumit kaki kiri dan berjalan sejauh 3 meter.
d. Lakukan sebanyak 10 kali bolak-balik kemuadian istirahat.
2.3.4 Mekanisme Latihan Jalan TandemMeningkatkan Keseimbangan Dinamis Pada Lansia
Pada Latihan Jalan Tandem propriorseptifakan menginformasikan presisi gerak dan reflek muscular yang berkontribusi pada pembentukan stabilitas dinamis pada sendi. Tujuan latihan proprioseptif adalah untuk dapat melatih kembali jaras afferent untuk mengembangkan sensasi gerakan sendi dan aktivasi motorik pada sistem saraf pusat. Latihan proprioseptifsangat penting untuk dilakukan karena umpan balik proprioseptif akan meningkatkan dan mempertahankan stabilitas fungsional sendi (Batson, 2009).
Latihan proprioseptifharus memakai teknik yang membangkitkan aktivasi otot pronator dan supinator kaki dalam melatih koordinasi, proprioseptif dan otot stabilisator pergelangan kaki. Aktivasi ko-kontraksi ini diupayakan terjadi
secara semi otomatis, karena sejatinya aktivitas stablitasi merupakan sistem yang berlangsung pada central pattern generator (CPG). Pada perkembangan manusia fungsi CPG yang benar menjadi bergantung pada integrasi saraf yang lebih tinggi, yaitu pada sistem saraf pusat, pada cortex cerebral. Aktivasi otot sekuensi temporal melibatkan CPG spinal dan integrasi sirkuit neural dengan input pusat otak yang lebih tinggi. Untuk mencapai gerakan semi otomatis yang dimaksud maka latihan proprioseptifjuga melibatkan gerakan yang lambat dalam setiap perpindahan gerak dan posisi untuk memberikan kesempatan pada nuclei subcortal dan basal ganglia untuk menganalisa posisi yang mengirimkan umpan balik berupa kontraksi otot yang diharapakan. Latihan inilah yang kemudian akan diadaptasi pada CPG sebagai stabilitas fungsional yang baru (Batson, 2009).
Latihan proprioseptifini bermanfaat meningkatkan keseimbangan pada lansia dikarenakan menunrunnya fungsi motorik pada sistem saraf pusat, sehingga dengan aktivasi motorik tersebut meningkatkan respon proprioseptif yang dapat meningkatkan stabilitas sendi dan meningkatkan keseimbangan pada lansia. Latihan proprioseptif yang hanya menghasilkan neural adaptasi dapat melatih selama 4 minggu, namun proprioseptif yang adekuat menghasilkan dengan latihan yang dilakukan selama 4 minggu, karena pada waktu tersebut telah terjadi adaptasi neural dan adaptasi seraut otot. Keseimbangan yang adekuat dicapai ketika proprioseptifyang didukung oleh rekruitmen motor unit yang meningkatkan dan adanya hipertropi (adapatasi sarabut otot) yang membantu dalam stabilitas sendi dan kekuatan otot dengan
dosis yang dianjurkan untuk dapat menghasilkan keseimbangan yang adekuat adalah 4 minggu (Batson, 2009).
2.4 Latihan One Legged Stence
2.4.1 Definisi Latihan One Legged Stence
Latihan One Legged stance merupakan suatu tes dan latihan yang dapat meningkatkan stabilitasi pada ankle, area panggul maupun trunk dan juga untuk meningkatkan postural kontrol sehingga keseimbangan dinamis akan lebih mudah tercapai. (Widayanto, 2015).
One Legged Stance dilakukan dengan menggunakan kemampuan berdiri dan menumpu dengan satu tungkai atau berdiri dengan beban tubuh yang disangga oleh salah satu tungkai saja. Kemampuan ini memerlukan aktivasi otot yang optimal pada sisi tubuh yang digunakan sebagai tumpuan dengan kemampuan berdiri dan menumpu satu tungkai yang optimal akan sangat mendukung kemampuan keseimbangan dinamisnya. Latihan ini dilakukan dengan mengangkat salah satu kakinya membentuk sudut 900 (fleksi knee 900) satu kaki yang menumpu sejajar atau datar dengan lantai atau permukaan yang datar. Mata pasien terbuka dan pandangan lurus ke depan, dengan 45 detik sebanyak 3kali pengulangan latihan dengan tangan menyentuh tembok (Younget al., 2012).
2.4.2 Tujuan Latihan One Legged Stence
Latihan ini merupakan salah satu latihan yang bertujuan melatih sikap atau posisi pertahanan tubuh sehingga dapat mengontrol keseimbangan, dan gerakan tubuh pada keseimbangan dinamis individu, serta kontrol mobilitas dan ketetapan mobilitas pada tubuh (Widayanto, 2015).
Latihan ini juga memerlukan aktivasi otot yang optimal pada sisi tubuh yang digunakan sebagai tumpuan dengan kemampuan pertahanan saat berdiri dengan satu tungkai secara bergantian yang bertujuan untuk melatih kemampuan keseimbangan dinamis pada tubuh menjadi meningkat dan lebih optimal (Widayanto, 2015).
2.4.3 Teknik Pelaksanaan Latihan One Legged Stence
Teknik pelaksanaan latihan one legged stance :
a. Pasien berdiri tegak dan nyaman dengan kedua kaki.
b. Tangan Pasien mengarah dan menyentuh tembok tepat pada arah depan tubuhnya.
c. Pandangan lurus ke depan.
d. Tes dimulai dengan menginstrusikan pasien untuk berdiri tegak dengan satu kaki, dalam artian pasien mengangkat salah satu kakinya membentuk sudut 900 (fleksi knee 900) satu kaki yang menumpu sejajar atau datar dengan lantai atau permukaan keras yang datar. Mata pasien terbuka dan pandangan lurus ke depan.
e. Pasien Hitung waktu kemampuan berdiri pasien dengan menggunakan stopwatch dan catat.
f.Ulangi latihan sebanyak 3 kali dan 45 detik.
g. Latihan selesai jika tangan bergerak menyentuh suatu benda yang digunakan untuk menopang, kaki yang menumpu bergerak, dan kaki yang diangkat menyentuh lantai (Laksono, 2013).
2.4.4 Mekanisme Latihan One Legged Stence terhadap Keseimbangan Dinamis Pada Lansia
Kemampuan optimal pada weight sifting mutlak diperlukan dalam menjaga fungsi keseimbangan dinamis kemampuan active weight shifting dapat dibentuk dengan beberapa latihan yang dimulai pada posisi berdiri yang dapat ditingkatkan dengan one legged stance exercise (Widayanto, 2015).
Menurut penelitian yang dilakukan oleh Cromwell et al.,(2006), dengan judul Tae Kwon Do : An Effective Exercise For Improving Balance and Walking Ability Older Adults, penelitian tersebut menyimpulkan bahwa latihan proprioseptifdengan walking Exercise / Standing Exercise mampu meningkatkan keseimbangan pada Lansia. Dan menurut penelitian yang dilakukan oleh Widayanto, (2015), dengan judul “Penambahan Activeone Leg Standing Exercisepada Active Strengthening Exercise Lebih Baik Dalam Meningkatkan Dynamic Balance Pasien Pasca Stroke”, penelitian tersebut menyimpulan bahwa latihan one leg stance/single leg stance merupakan latihan yang dapat meningkatkan stabilitasi pada ankle, area panggul maupun trunk dan juga untuk meningkatkan postural kontrol sehingga keseimbangan dinamis akan lebih mudah tercapai.
One Legged Stance dilakukan dengan menggunakan kemampuan berdiri dan menumpu dengan satu tungkai atau berdiri dengan beban tubuh yang disangga oleh salah satu tungkai saja. Kemampuan ini memerlukan aktivasi otot yang optimal pada sisi tubuh yang digunakan sebagai tumpuan dengan kemampuan berdiri dan menumpu satu tungkai yang optimal akan sangat mendukung kemampuan keseimbangan dinamisnya. Latihan ini dilakukan dengan mengangkat salah satu kakinya membentuk sudut 900 (fleksi knee 900) satu kaki yang menumpu sejajar atau datar dengan lantai atau permukaan yang datar. Mata pasien terbuka dan pandangan lurus ke depan, dengan 45 detik sebanyak 3kali pengulangan latihan dengan tangan menyentuh tembok (Young et al., 2012).
Tujuan latihan ini yaitu melatih sikap atau posisi pertahanan tubuh sehingga dapat mengontrol keseimbangan, dan gerakan tubuh pada keseimbangan dinamis individu, serta kontrol mobilitas dan ketetapan mobilitas pada tubuh. Latihan ini juga memerlukan aktivasi otot yang optimal pada sisi tubuh yang digunakan sebagai tumpuan dengan kemampuan pertahanan saat berdiri dengan satu tungkai secara bergantian yang bertujuan untuk melatih kemampuan keseimbangan dinamis pada tubuh menjadi meningkat dan lebih optimal. Kemampuan optimal pada weight sifting mutlak diperlukan dalam menjaga fungsi keseimbangan dinamis kemampuan active weight shifting dapat dibentuk dengan beberapa latihan yang dimulai pada posisi berdiri yang dapat ditingkatkan dengan one legged stance exercise (Widayanto, 2015).
Dengan one legged stance exercise maka akan berpengaruh pada beberapa hal yaitu, meningkatnya kemampuan actipatory exercise adjustments pada trunk
di sisi tubuh yang digunakan sebagai tumpuan, sebagai aktivasi otot-otot tungkai yang di gunakan untuk menumpu, meningkatnya kemampuan sistem somatosensoris dalam menyampaikan informasi ke sistem saraf pusat, dan meningkatnya kemampuan pada otot-otot pada ankle dan kontrol gerakan saat digunakan untuk menumpu (Raineet al., 2009).
2.5 Time Up and Go Test(TUGT) Sebagai Tes Pengukuran Keseimbangan
Dinamis 2.5.1 Definisi
Pengukuran keseimbangan menggunakan Times Up Go Test (TUGT)merupakan suatu tes yang dapat digunakan pada lansia untuk mengukur kecepatan terhadap aktivitas yang mungkin menyebabkan gangguan keseimbangan.
2.5.2 Prosedur Pelaksanaan
Prosedur pengukuran keseimbangan dinamis dengan menggunakan times up go test (TUGT).
1) Peneliti menyiapkan kursi dengan sandaran dan penyangga lengan, stopwatch, dinding.
2) Waktu tes 10 detik - 3 menit.
Posisi awal pasien duduk bersandar pada kursi dengan lengan berada pada penyangga lengan kursi. Pasien mengenakan alas kaki yang biasa dipakai. Pada saat fisioterapis memberi aba-aba “mulai” pasien berdiri dari kursi, boleh menggunakan tangan untuk mendorong berdiri jika pasien menghendaki. Pasien terus berjalan sesuai dengan kemampuannya menempuh jarak 3 meter menuju ke
dinding, kemudian berbalik tanpa menyentuh dinding dan berjalan kembali menuju kursi. Sesampainya di depan kursi pasien berbalik dan duduk kembali bersandar. Waktu dihitung sejak aba-aba “mulai” hingga pasien duduk bersandar kembali. (Shumwayet al., 2000).
Pasien tidak diperbolehkan mencoba atau berlatih lebih dulu, stopwatch mulai menghitung setelah pemberian aba-aba mulai dan berhenti menghitung saat subyekkembali pada posisi awal atau duduk, apabila kurang dari 10 detik, maka subjek dikatakan normal dan apabila kurang dari 20 detik, maka dapat dikatakan baik. Subjek dapat berjalan sendiri tanpa membutuhkan bantuan, namun apabila lebih dari 30 detik, maka subjek dikatakan memiliki problem dalam berjalan dan membutuhkan bantuan saat berjalan.Subjek yang memcapai waktu tempuh lebih dari 40 detik harus mendapatkan pengawasan yang optimal karena sangat beresiko untuk jatuh (Shumwayet al., 2000). Nilai normal pada lansia sehat umur 75 tahun, rata-rata waktu tempuh yang dibutuhkan adalah 8,5 detik (Podsiadlo dan Richanson, 1991).
Tabel 2.1.
Pengukuran Keseimbangan Dinamis dengan Times Up and Go Test (TUGT)
Sumber: (Shumwayet al., 2000)
No. Waktu Interpretasi
1. < 10 detik Normal
2. < 20 detik Baik
3. > 30 detik Problem dalam berjalan