17
PERANCANGAN ALAT
Bab ini akan membahas mengenai perancangan alat dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan alat yang
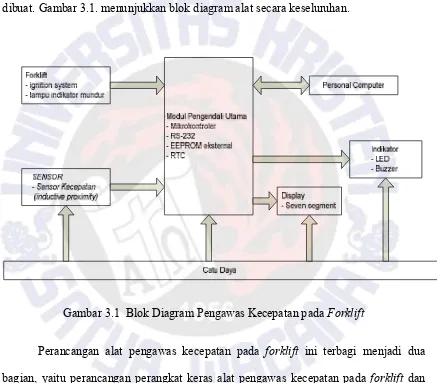
dibuat. Gambar 3.1. menunjukkan blok diagram alat secara keseluruhan.
Gambar 3.1 Blok Diagram Pengawas Kecepatan pada Forklift
Perancangan alat pengawas kecepatan pada forklift ini terbagi menjadi dua
bagian, yaitu perancangan perangkat keras alat pengawas kecepatan pada forklift dan perancangan perangkat lunak alat pengawas kecepatan pada forklift.
3.1 Cara Kerja Alat Pengawas Kecepatan pada Forklift
Dalam tugas akhir ini dirancang dan direalisasikan sebuah alat pengawas kecepatan pada forklift yang akan mencatat pelanggaran-pelanggaran kecepatan yang
Cara kerja dari alat pengawas kecepatan pada forklift ini akan dijelaskan pada langkah-langkah sebagai berikut :
1. Alat pengawas kecepatan pada forklift akan aktif apabila ignition sytem atau kunci
kontak forklift pada keadaan ON. Saat kunci kontak forklift ON maka ACCU
forklift akan memberikan tegangan keluaran untuk menghidupkan alat dan menjadi
kondisi active.
2. Pada kondisi active terdapat dua kondisi pengawasan yang terbagi sebagai berikut: a. Pengawas arah laju Forklift
mikrokontroler akan mengecek keluaran dari modul pengawas arah laju forklift
dimana modul ini berfungsi untuk mengetahui kondisi lampu indikator mundur
pada forklift. Mikrokontroler akan mengecek keluaran sensor yaitu inductive proximity kemudian akan menampilkan kecepatan forklift pada seven segment, kemudian mikrokontroler akan menyalakan indikator berupa LED berwarna
hijau saat nilai kecepatan lebih kecil dari nilai ambang kecepatan pengawas arah laju forklift atau LED merah saat nilai kecepatan lebih besar dari nilai
ambang kecepatan pengawas arah laju forklift yang sudah ditentukan. Apabila nilai kecepatan forklift melebihi nilai ambang kecepatan pengawas arah laju
forklift yang sudah ditentukan dan terjadi perubahan arah laju dari maju
menjadi mundur atau sebaliknya maka mikrokontroler akan menyimpan data kesalahan operator tersebut dalam EEPROM external berupa kecepatan,
tanggal, jam, jenis pelanggaran. b. Pengawas Kecepatan Forklift
Mikrokontroler akan mengecek keluaran sensor kecepatan yaitu inductive proximity kemuduian mikrokontroler akan menampilkan kecepatan forklift
pengawas batas kecepatan forklift yang sudah ditentukan maka seven segment
akan menyala kedip dan mengaktifkan indikator berupa buzzer serta mikrokontroler akan menyimpan data kesalahan operator tersebut dalam
EEPROM external berupa kecepatan, tanggal, jam, dan jenis pelanggaran. 3. Aplikasi Desktop
Aplikasi desktop adalah aplikasi yang dirancang pada personal computer yang akan terhubung pada mikrokontroler melalui modul serial RS-232. Komunikasi antara personal computer dan mikrokontroler akan dilakukan pada saat dibutuhkan
saja, yaitu saat user ingin memasukkan atau mengambil data pada mikrokontroler melalui aplikasi desktop. Dalam aplikasi desktop terdapat beberapa menu yang
terdiri dari:
1. Nilai ambang (threshold) kecepatan ‘1’ sebagai pengawas kecepatan forklift. 2. Nilai ambang (threshold) kecepatan ‘2’ sebagai pengawas arah laju forklift.
3. Diameter roda forklift.
4. Pengambilan data yang sudah tersimpan pada EEPROM.
Untuk menu nilai ambang kecepatan yang terdapat aplikasi desktop ini akan menjadi nilai yang tersimpan pada mikrokontroler dan menjadi pembanding nilai keluaran sensor kecepatan ke mikrokontroler untuk alat ini bekerja. Melalui
3.2 Perangkat Keras Alat Pengawas Kecepatan pada Forklift
Perangkat keras yang dirancang dan direalisasikan pada alat pengawas ini terdiri modul pengendali utama, modul sensor, modul penampil, modul pengawas arah laju
forklift,danindikator nilai ambang batas kecepatan.
3.2.1 Modul Pengendali Utama
Modul pengendali utama terdiri dari modul mikrokontroler, RS-232, EEPROM eksternaldan RTC.
3.2.1.1 Mikrokontroler
Pada Bab II sudah dijelaskan bahwa dalam perancangan alat ini menggunakan mikrokontroler keluarga AVR jenis Atmega32. Mikrokontroler ATMega32 dipilih
karena memiliki fitur seperti kapasitas memori program dan memori data yang cukup besar, interupsi, timer/ counter, USART. Mikrokontroler ini berfungsi sebagai pengendali utama dalam alat pengawas yang dibuat sehingga semua proses yang
meliputi penerimaan dan pengolahan data dari inductive proximity, pengendalian indikator berupa buzzer dan LED , dan sevent segment sebagai penampil nilai
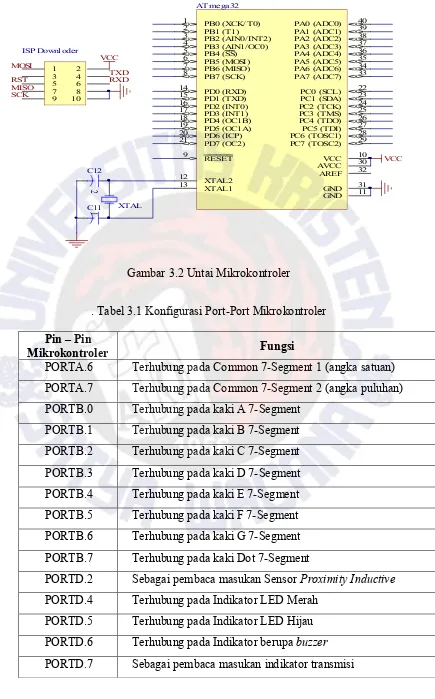
Gambar 3.2 Untai Mikrokontroler
. Tabel 3.1 Konfigurasi Port-Port Mikrokontroler
Pin – Pin
Mikrokontroler Fungsi
PORTA.6 Terhubung pada Common 7-Segment 1 (angka satuan) PORTA.7 Terhubung pada Common 7-Segment 2 (angka puluhan) PORTB.0 Terhubung pada kaki A 7-Segment
PORTB.1 Terhubung pada kaki B 7-Segment PORTB.2 Terhubung pada kaki C 7-Segment PORTB.3 Terhubung pada kaki D 7-Segment PORTB.4 Terhubung pada kaki E 7-Segment PORTB.5 Terhubung pada kaki F 7-Segment PORTB.6 Terhubung pada kaki G 7-Segment PORTB.7 Terhubung pada kaki Dot 7-Segment
PORTD.2 Sebagai pembaca masukan Sensor Proximity Inductive
PORTD.4 Terhubung pada Indikator LED Merah PORTD.5 Terhubung pada Indikator LED Hijau PORTD.6 Terhubung pada Indikator berupa buzzer
PORTD.7 Sebagai pembaca masukan indikator transmisi
3.2.1.2 RS-232
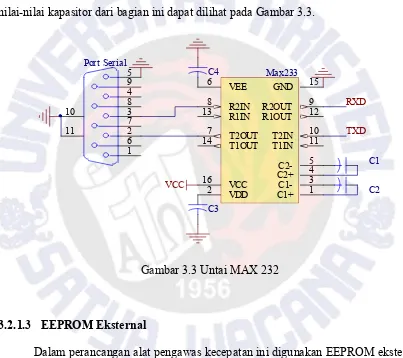
RS-232 digunakan sebagai protokol serial port untuk komunikasi antarmuka antara mikrokontroler dengan PC, dalam hal ini digunakan IC Max 232 yang berfungsi
meneruskan data dari AVR ke komputer dengan cara mengubah level tegangan (dari level tegangan TTL ke level tegangan RS-232, dan level tegangan RS-232 ke level
tegangan TTL). Berdasarkan datasheet MAX 232[10], untai perangkat keras beserta nilai-nilai kapasitor dari bagian ini dapat dilihat pada Gambar 3.3.
Gambar 3.3 Untai MAX 232
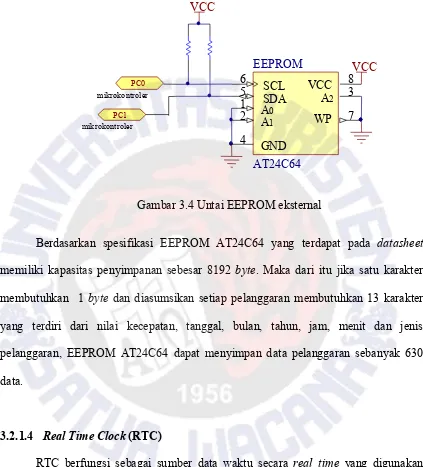
3.2.1.3 EEPROM Eksternal
Dalam perancangan alat pengawas kecepatan ini digunakan EEPROM eksternal
dikarenakan kebutuhan memory yang besar sebagai penunjang kebutuhan penyimpanan data pada alat ini. Dalam alat ini akan menyimpan pelanggaran-pelanggaran para
operator forklift berupa data kecepatan, waktu secara real time, dan jenis pelanggaran. EEPROM eksternal dalam perancangan ini menggunakan EEPROM AT24C64 yang dikeluarkan oleh perusahaan ATMEL. Untuk membaca atau menulisi EEPROM
eksternal ini dapat dilakukan melalui komunikasi serial I2C dengan untai berdasarkan
datasheet, untai perangkat keras dari bagian ini dapat dilihat pada Gambar 3.4.
Gambar 3.4 Untai EEPROM eksternal
Berdasarkan spesifikasi EEPROM AT24C64 yang terdapat pada datasheet
memiliki kapasitas penyimpanan sebesar 8192 byte. Maka dari itu jika satu karakter membutuhkan 1 byte dan diasumsikan setiap pelanggaran membutuhkan 13 karakter yang terdiri dari nilai kecepatan, tanggal, bulan, tahun, jam, menit dan jenis
pelanggaran, EEPROM AT24C64 dapat menyimpan data pelanggaran sebanyak 630 data.
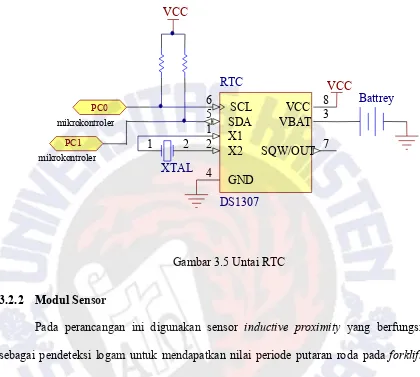
3.2.1.4 Real Time Clock (RTC)
RTC berfungsi sebagai sumber data waktu secara real time yang digunakan
untuk bekerjanya alat ini. Pada perancangan ini menggunakan RTC DS1307, untuk membaca waktu yang tersimpan di RTC DS 1307 dapat dilakukan dengan komunikasi
serial I2C. RTC ini menggunakan kristal 32,768 kHz sesuai dengan datasheet IC DS1307[11]. Pin 5 dan 6 merupakan SDA dan SCL yang dihubungkan dengan PD0 dan PD1 pin mikrokontroller. Pada tegangan keluaran SDA dan SDL dipasang resistor 330
ohm sebagai pull up keluaran RTC, untai perangkat keras dari bagian ini dapat dilihat pada Gambar 3.5.
Gambar 3.5 Untai RTC
3.2.2 Modul Sensor
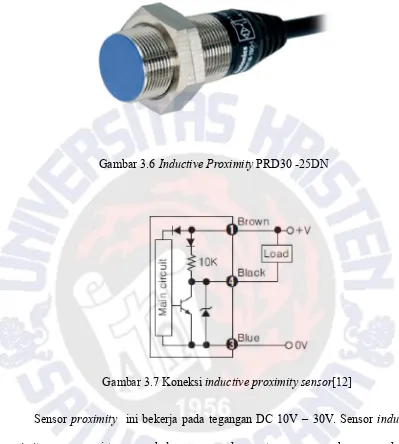
Pada perancangan ini digunakan sensor inductive proximity yang berfungsi sebagai pendeteksi logam untuk mendapatkan nilai periode putaran roda pada forklift
yang kemudian akan diolah oleh mikrokontroler untuk mendapatkan nilai kecepatan. Untuk mendapatkan nilai kecepatan tersebut digunakan perhitungan pada Persamaan 2.3. Sensor inductive proximity yang digunakan adalah inductive proximity sensor
PRD30-25DN keluaran dari perusahaan Autonics seperti yang dapat dilihat pada Gambar 3.6. Sensor ini mempunyai 3 pin yang terdiri dari VCC, GND, DATA yang
dapat dilihat pada Gambar 3.7.
Gambar 3.6 Inductive Proximity PRD30 -25DN
Gambar 3.7 Koneksi inductive proximity sensor[12]
Sensor proximity ini bekerja pada tegangan DC 10V – 30V. Sensor inductive proximity mempunyai tegangan keluaran sama dengan tegangan masukannya pada saat
mendeteksi logam. Pada perancangan ini digunakan tegangan 12V sebagai tegangan masukan sensor proximity inductive mengingat sumber catu daya yang digunakan
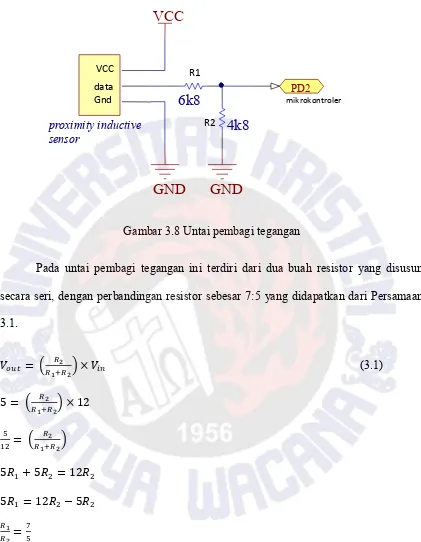
adalah accu forklift yaitu 12V. Supaya sensor ini dapat digunakan menjadi masukan mikrokontroler sebesar 5V, maka pada keluaran sensor diberi rangkaian pembagi
Gambar 3.8 Untai pembagi tegangan
Pada untai pembagi tegangan ini terdiri dari dua buah resistor yang disusun secara seri, dengan perbandingan resistor sebesar 7:5 yang didapatkan dari Persamaan
3.1.
= × (3.1)
5 = × 12
=
5 + 5 = 12
5 = 12 − 5
=
Untuk mendekati nilai perbandingan tersebut maka dipilih resistor yang dihubungkan seri sebesar 6k8 ohm dengan 5k1 ohm. Sehingga dengan adanya kedua
resistor yang dihubungkan seri tersebut, maka didapatkan tegangan keluaran sebesar : data
VCC
proximity inductive sensor
VCC
GND
6k8
4k8
GND
Gnd
R1
R2
PD2
= × (3.2)
= × 12
= × 12
= 5.14
3.2.3 Modul Penampil
Modul penampil pada perancangan alat ini digunakan sebagai penampil kecepatan yang diperoleh dari keluaran mikrokontroler. Modul penampil dirancang
dengan menggunakan dua seven segment 18102BS common anoda dengan lebar seven segment 38x56 mm seperti yang dapat dilihat pada Gambar 3.9. Seven segment ini
bekerja pada tegangan minimum sebesar 2V dan membutuhkan arus sebesar 20mA setiap segment.
Gambar 3.9 Konfigurasi kaki segment 18012BS[13]
tersambung) bila common base diberi tegangan 0 (low). Bila transistor PNP “on” maka secara otomatis common anoda pada seven segment akan terhubung pada VCC. Transistor yang digunakan adalah BC 556. Sedangkan untuk mengatur segment
(a,b,c,d,e,f,g) pada seven segment digunakan IC ULN 2003, cara kerja ULN adalah seperti gerbang “NOT”, jadi bila kita memasukkan logika ‘1’ maka ULN akan merubah
menjadi logika ‘0’. Dalam perancangan modul ini digunakan transistor dan ULN seperti yang dapat dilihat pada Gambar 3.10. Untuk menghitung nilai resistor pada keluaran ULN 2003 maka hal-hal yang perlu diketahui adalah:
1. Vce saturasi transistor PNP = 0.2 V
2. Vbe transistor PNP= 0.7 V
3. Vss yang diambil oleh seven segment = 2 V
4. Vol ULN = 0.2 V
5. Iss (Arus yang dibutuhkan tiap segment)= 20 mA
Untuk menghitung nilai resistor pada keluaran ULN 2003 adalah sebagai berikut:
= ( ) (3.3)
= ( . . )
= 130 ℎ
Jadi nilai resistor pada keluaran ULN 2003 adalah 130 ohm.
Untuk menghitung resistor pada base transistor PNP digunakan Persamaan sebagai berikut:
- Ic yang dibutuhkan = 7 x 20 mA = 140 mA
= (3.4)
= 1.12
= (3.5)
= (. . )
= 3839 ℎ
Jadi pada tegangan base transistor PNP dapat dipasang resistor dengan nilai 3900 ohm.
Gambar 3.10 Untai Modul Penampil
3.2.4 Modul Pengawas Arah Laju Forklift
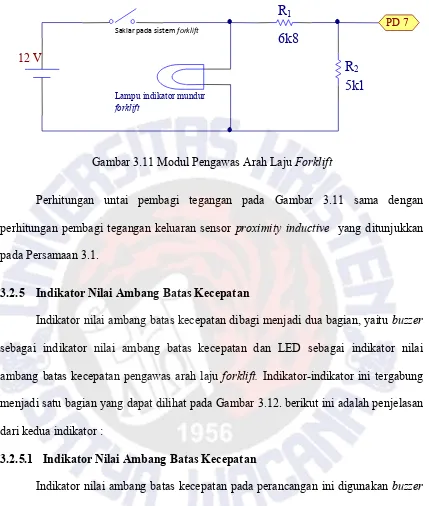
Modul pengawas arah laju forklift ini berfungsi untuk membaca lampu indikator
mundur forklift yang bekerja pada tegangan sebesar 12V. Untuk membaca kondisi lampu indikator mundur digunakan dua resistor yang berfungsi untuk mendapatkan tegangan keluaran sebesar 5V, sehingga tegangan keluaran ini dapat menjadi masukan
langsung pada mikrokontroler.
Gambar 3.11 Modul Pengawas Arah Laju Forklift
Perhitungan untai pembagi tegangan pada Gambar 3.11 sama dengan
perhitungan pembagi tegangan keluaran sensor proximity inductive yang ditunjukkan pada Persamaan 3.1.
3.2.5 Indikator Nilai Ambang Batas Kecepatan
Indikator nilai ambang batas kecepatan dibagi menjadi dua bagian, yaitu buzzer
sebagai indikator nilai ambang batas kecepatan dan LED sebagai indikator nilai ambang batas kecepatan pengawas arah laju forklift. Indikator-indikator ini tergabung menjadi satu bagian yang dapat dilihat pada Gambar 3.12. berikut ini adalah penjelasan
dari kedua indikator :
3.2.5.1 Indikator Nilai Ambang Batas Kecepatan
Indikator nilai ambang batas kecepatan pada perancangan ini digunakan buzzer
12V yang berfungsi sebagai alarm jika kecepatan melebihi batas kecepatan yang sudah ditentukan. Karena buzzer yang digunakan hanya akan aktif dengan baik apabila diberi
tegangan 12V sedangkan tegangan keluaran dari mikrokontroler hanya 5V, maka untuk mengontrol buzzer tersebut dibutuhkan ULN 2003 dengan untai yang dapat dilihat pada
Gambar 3.12.
5k1
6k8
Lampu indikator mundur
forklift
PD 7
12 V
R
1R
23.2.5.2 Indikator Nilai Ambang Kecepatan Pengawas Arah laju Forklift
Indikator nilai ambang kecepatan pengawas arah laju forklift pada perancangan ini digunakan LED yang berfungsi sebagai penanda saat operator forklift diperbolehkan
atau tidak diperbolehkan merubah arah laju forklift. Indikator pada bagian ini terdiri dari dua LED, yaitu LED hijau saat operator diperbolehkan merubah arah laju forklift
dan LED merah saat operator tidak merubah arah laju forklift, untuk mengontrol LED ini digunakan ULN 2003 yang dapat dilihat pada Gambar 3.12. Untuk menghitung nilai resistor pada keluaran ULN 2003 maka hal-hal yang perlu diketahui adalah:
1. VLED = 2 V
2. ILED = 20 mA
3. Vol ULN = 0.2 V
Untuk menghitung nilai resistor pada keluaran ULN 2003 adalah sebagai berikut:
= ( ) (3.5)
= ( . )
= 140 ℎ
Jadi nilai resistor yang dibutuhkan masing –masing LED pada keluaran ULN 2003 adalah 140 ohm.
Gambar 3.12 Modul Pengendali Indikator Nilai Ambang Batas Kecepatan
3.3 Perangkat Lunak Alat Pengawas Kecepatan pada Forklift
Perangkat lunak pada alat pengawas kecepatan pada forklift ini digunakan untuk melakukan pengolahan semua alur yang terdapat pada alat secara keseluruhan baik
terhadap masukan maupun keluaran. Alur yang terdapat dalam alat pengawasan ini dibagi menjadi beberapa bagian, yaitu diagram alir pengawas kecepatan pergantian arah
laju forklift, diagram alir pengawas kecepatan forklift, diagram alir pemasukan data pada mikrokontroler melalui aplikasi desktop, dan aplikasi desktop.
3.3.1 Diagram Alir Pengawas Arah laju Forklift
Pengawas arah laju forklift ini berfungsi untuk membatasi para operator forklift
pada saat merubah arah laju forklift, diagram alir dari proses ini dapat dilihat pada pada
Gambar 3.13. Kondisi awal merupakan kondisi posisi kunci kontak yang terdapat pada
forklift. Saat posisi kunci kontak ON (ignition system forklift ON) maka alat pengawas ini akan aktif dan sebaliknya saat posisi kunci kontak OFF (ignition system forklift
OFF). Apabila alat ini aktif, mikrokontroler akan menerima masukan dari sensor
proximity inductive dan menampilkan nilai kecepatan pada seven segment. Kemudian
mikrokontroler mengecek apakah ada perpindahan arah laju pada forklift. Jika tidak terjadi perpindahan arah laju, mikrokontroler akan menerima masukan dari sensor dan menampilkan nilai kecepatan pada seven segment. Jika terjadi perpindahan arah laju
maka mikrokontroler akan mengecek kecepatan forklift. Jika kecepatan forklift lebih kecil dari nilai ambang batas kecepatan pengawas arah laju forklift (threshold ‘2’)maka
mikrontroler akan kembali pada proses awal. Jika kecepatan forklift lebih besar dari nilai ambang batas kecepatan pengawas arah laju forklift maka mikrontroler akan menyimpan data pelanggaran tersebut pada EEPROM, kemudian mikrokontroler akan
Gambar 3.13 Diagram Alir Pengawas Kecepatan Arah Laju Forklift
3.3.2 Diagram Alir Pengawas Kecepatan Forklift
Kondisi awal merupakan kondisi posisi kunci kontak yang terdapat pada forklift.
Saat posisi kunci kontak ON (ignition system forklift ON) maka alat pengawas ini akan aktif dan sebaliknya saat posisi kunci kontak OFF (ignition system forklift OFF).
Apabila alat ini aktif, mikrokontroler akan menerima masukan dari sensor proximity inductive dan menampilkan nilai kecepatan pada seven segment. Kemudian mikrokontroler mengecek kecepatan forklift apakah lebih besar atau lebih kecil dari
nilai ambang batas kecepatan pada forklift (threshold ‘1’). Jika nilai kecepatan forklift
lebih kecil dari nilai threshold ‘1’ maka mikrontroler akan kembali pada proses awal.
menyimpan data pelanggaran tersebut pada EEPROM kemudian mikrokontroler akan kembali pada proses awal. Diagram alir untuk alur ini dapat dilihat pada Gambar 3.14.
Gambar 3.14 Diagram Alir Pengawas Kecepatan Forklift
3.3.3 Aplikasi Desktop
Untuk merancang aplikasi desktop pengawas kecepatan forklift ini digunakan program Visual Studio.Net 2008 dengan bahasa Visual Basic. Aplikasi desktop disini
berfungsi sebagai user interface antara alat dengan pengguna,yaitu untuk memberi nilai ambang batas kecepatan dan pengambilan data pada EEPROM. Untuk tampilan aplikasi desktop yang dirancang dapat dilihat pada Gambar 3.15 dan 3.16, berikut
Gambar 3.15 Tampilan Utama Aplikasi Desktop yang Dirancang
Gambar 3.16 Tampilan Kedua Pada Aplikasi Desktop
3.3.3.1 Diagram Alir Pemasukan Data Mikrokontroler dari Aplikasi Desktop Dalam aplikasi desktop ini terdapat tiga text box yang berfungsi untuk memberikan nilai threshold ‘1’, threshold ‘2’, dan diameter roda forklift. Alur dari
Gambar 3.17 Diagram Alir Pemasukan Data oleh Aplikasi Desktop ke Mikrokontroler
Gambar 3.18 Diagram Alir Penyimpanan Data dari Aplikasi Desktop oleh
3.3.3.2 Diagram Alir Pengambilan Data dari EEPROM oleh Aplikasi Desktop
Dalam Alur proses ini aplikasi desktop mengambil data dari EEPROM eksternal melalui mikrontroler kemudian disimpan pada personal komputer.
![Gambar 3.9 Konfigurasi kaki segment 18012BS[13]](https://thumb-ap.123doks.com/thumbv2/123dok/786027.583313/11.595.98.522.319.646/gambar-konfigurasi-kaki-segment-bs.webp)