TUGAS AKHIR - SM0141501
KONSTRUKSI FUNGSI LYAPUNOV UNTUK
MENENTUKAN KESTABILAN SISTEM LORENZ
RENI SUNDARI
NRP 1213 100 098
Dosen Pembimbing:
Prof.Dr.Erna Apriliani,M.Si
JURUSAN MATEMATIKA
Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Teknologi Sepuluh Nopember
FINAL PROJECT - SM141501
A CONSTRUCTION OF LYAPUNOV FUNCTION
FOR DETERMINING STABILITY LORENZ
SYSTEM
RENI SUNDARI
NRP 1213 100 098
Supervisors:
Prof.Dr.Erna Apriliani,M.Si
DEPARTMENT OF MATHEMATICS
LEMBAR PENGESAHAN
KONSTRUKSI FUNGSI LYAPUNOV UNTUK
MENENTUKAN KESTABILAN SISTEM
LORENZ
A CONSTRUCTION OF LYAPUNOV
FUNCTION FOR DETERMINING
STABILITY LORENZ SYSTEM
Diajukan Untuk Memenuhi Salah Satu Syarat
Untuk Memperoleh Gelar Sarjana Sains
pada
Bidang Studi Matematika Terapan
Program Studi S-1 Jurusan Matematika
Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Teknologi Sepuluh Nopember Surabaya
Oleh:
RENI SUNDARI
NRP. 1213 100 098
Menyetujui,
Dosen Pembimbing II,
Dosen Pembimbing I,
Prof.Dr.Erna Apriliani,M.Si
NIP.
NIP. 19660414 199102 2 001
Mengetahui,
Ketua Jurusan Matematika
FMIPA ITS
Prof. Dr. Erna Apriliani, M.Si
NIP. 19660414 199102 2 001
KONSTRUKSI FUNGSI LYAPUNOV UNTUK
MENENTUKAN KESTABILAN SISTEM
LORENZ
Nama Mahasiswa
:
RENI SUNDARI
NRP
:
1213 100 098
Jurusan
:
Matematika FMIPA-ITS
Pembimbing
:
Prof.Dr.Erna Apriliani,M.Si
Abstrak
Fungsi
Lyapunov
adalah
salah
satu
fungsi
yang
dikonstruksi
untuk
memeriksa
kestabilan
global
dari
suatu sistem non linier.
Pada penelitian ini digunakan
metode
Variabel
Gradien,
Kravoskii
dan
Energi
Casimir
dalam
mengkonstruksi
fungsi
Lyapunov.
Berdasarkan hasil perhitungan dn simulasi yang dilakukan
menggunakan
metode
variabel
gradien
dan
metode
Energi Casimir diperoleh fungsi Lyapunov untuk sistem
Lorenz
pada
semua
titik
kesetimbangan.Sedangkan
metode
Kravoskii
belum
menghasilkan
fungsi
Lyapuno
untuk
sistem
Lorenz
pada
semua
titik
kesetimbangan.
Kata-kunci:
Fungsi
Lyapunov,Metode
Variabel
Gradien,Metode Krasovkii, Metode
Energi-Casimir, Sistem Lorenz
.
A CONSTRUCTION OF LYAPUNOV
FUNCTION FOR DETERMINING STABILITY
LORENZ SYSTEM
Name
:
RENI SUNDARI
NRP
:
1213 100 098
Department
:
Mathematics FMIPA-ITS
Supervisor
:
Prof.Dr.Erna Apriliani,M.Si
Abstract
Lyapunov function is a function that is constructed to
examine the global stability of a system of non linear. Research
on Variable Gradient method is used, Kravoskii and energy
Casimir in constructing Lyapunov function.
Based on the
results of the calculations are performed using simulated dn
method of variable gradient method and Casimir Energy
retrieved Lyapunov function for a system of Lorenz on all
point of equilibrium. While the Kravoskii method is not yet
generating function Lyapunov for all points on the Lorenz
system equilibrium.
Keywords:
Lyapunov
Function,Variabel
Gradien
method,Krasovkii
Method,
Energy-Casimir
Method, Lorenz System
KATA PENGANTAR
Assalamu’alaikum Wr. Wb.
Alhamdulillaahirobbil’aalamiin, segala puji dan syukur
penulis panjatkan ke hadirat Allah SWT yang telah
memberikan limpahan rahmat, taufik serta hidayah-Nya,
sehingga penulis dapat menyelesaikan Tugas Akhir yang
berjudul
”KONSTRUKSI FUNGSI LYAPUNOV UNTUK
MENENTUKAN KESTABILAN PADA SISTEM
LORENZ”
sebagai salah satu syarat kelulusan Program Sarjana Jurusan
Matematika FMIPA Institut Teknologi Sepuluh Nopember
(ITS) Surabaya.
Tugas Akhir ini dapat terselesaikan dengan baik berkat
bantuan dan dukungan dari berbagai pihak. Oleh karena itu,
penulis menyampaikan ucapan terima kasih dan penghargaan
kepada:
1. Bapak Dr.
Imam Mukhlash,
S.Si,
MT selaku
Ketua Jurusan Matematika ITS yang telah memberikan
dukungan dan motivasi selama perkuliahan hingga
terselesaikannya Tugas Akhir ini.
2. Ibu Prof.Erna Apriliani,M.Si selaku dosen pembimbing
atas segala bimbingan dan motivasinya kepada penulis
sehingga dapat terselesaikan dengan baik.
3. Bapak dan Ibu dosen penguji atas semua saran dan
masukan yang telah diberikan.
4. Bapak Drs. Iis Herisman, M.Si selaku koordinator Tugas
Akhir.
5. Ibu Dian Winda selaku dosen wali yang telah
memberikan
arahan
akademik
selama
penulis
menempuh pendidikan di Jurusan Matematika FMIPA
ITS.
6. Bapak dan Ibu dosen serta para staf Jurusan
Matematika ITS yang tidak dapat penulis sebutkan
satu-persatu.
Penulis juga menyadari bahwa dalam pengerjaan ini
masih terdapat kekurangan. Oleh sebab itu, kritik dan saran
yang bersifat membangun sangat penulis harapkan demi
kesempurnaan Tugas Akhir ini. Akhirnya, penulis berharap
semoga penulisan ini dapat bermanfaat bagi banyak pihak.
Surabaya, 05 Januari 2017
Penulis
DAFTAR ISI
DAFTAR GAMBAR
DAFTAR TABEL
DAFTAR LAMPIRAN
LAMPIRAN A Listing Program ...
41
LAMPIRAN B Biodata Penulis ...
41
BAB I
PENDAHULUAN
Pada bab ini diuraikan tentang latar belakang yang
mendasari penulisan tugas akhir.
Di dalamnya mencakup
identifikasi
permasalahan,
beberapa
informasi
tentang
penelitian terdahulu yang berhubungan dengan topik tugas
akhir. Uraian ini bersifat umum yang menjelaskan secara
ringkas hal-hal yang akan dilakukan pada penyelesaian
tugas akhir. Dari informasi tersebut kemudian dirumuskan
permasalahan yang akan dibahas, tujuan, batasan masalah,
manfaat, dan kontribusi penelitian dari tugas akhir ini.
1.1
Latar Belakang
Matematika
merupakan
disiplin
ilmu
yang
dapat
diterapkan dalam berbagai ilmu pengetahuan dan dapat
memberikan interpretasi solusi analitis yang lebih rinci.
Permasalahan-permasalahan nyata dapat diselesaikan dengan
metode teoritis dan matematis setelah melalui tahap-tahap
pemodelan matematika. Suatu model matematika dikatakan
baik apabila mampu memberikan gambaran objeknya dengan
cukup jelas atau secara luas mampu menggambarkan keadaan
yang sesungguhnya, sehingga tujuan dari penyusunan model
tercapai.
Permasalahan yang terjadi dalam kehidupan sehari-hari
kebanyakan merupakan sistem dinamik.
Sistem dinamik
yaitu suatu sistem persamaan yang dipengaruhi oleh
perubahan gerak dan waktu.
Salah satu kajian penting
dalam permasalahan sistem dinamik yakni bagaimana
keadaan sistem, apakah sistem tersebut merupakan sistem
2
yang stabil atau tak stabil.
Aleksander
Mikhailovich
Lyapunov
dalam
tesisnya
yang berjudul
A general task about the stability of motion
mengembangkan dua metode untuk menganalisis kestabilan
dari suatu kesetimbangan, yang dikenal dengan metode
Lyapunov langsung (The Second Method of Lyapunov
)
dan metode Lyapunov tak langsung (First Method).
Hal
yang unik dari metode Lyapunov langsung bahwa untuk
menyelesaikan permasalahan kestabilan sistem, yang perlu
diketahui adalah bentuk persamaan diferensial sistemnya
atau bentuk fisisnya bukan solusinya [1].
Metode
Lyapunov
pertama
hanya
digunakan
mendapatkan kestabilan lokal (hanya disekitar titik yang
diselidiki) tidak mendapatkan kestabilan global dari sistem
dinamik nonlinier. Sedangkan untuk mendapatkan kestabilan
global digunakan metode Lyapunov langsung. Penyelesian
kestabilan sistem dinamik dengan metode Lyapunov langsung
mensyaratkan suatu fungsi, yang disebut sebagai fungsi
Lyapunov.
Yaitu fungsi skalar yang memenuhi beberapa
syarat diantaranya jika ada sebuah fungsi definit positif
sedemikian sehingga turunan dari yaitu semidefinit negatif
[1].
Metode Lyapunov langsung banyak diterapkan untuk
menganalisis kestabilan baik sistem linier maupun sistem
nonlinier, sistem
time-invariant
dan juga sistem
time-varrying.
3
1.2
Rumusan Masalah
Berdasarkan
uraian
di
atas,
permasalahan
yang
diselesaikan dalam Tugas Akhir ini adalah:
a. Bagaimana pembentukan fungsi Lyapunov dengan
menggunakan
metode
variabel
gradien,
metode
Krasovskii dan metode Energi-Casimir pada sistem
Lorenz?
b. Bagaimana analisa kestabilan dari masing-masing fungsi
Lyapunov yang dihasilkan dari metode variabel gradien,
metode Krasovskii dan metode Energi-Casimir pada
sistem Lorenz?
1.3
Batasan Masalah
Penelitian ini menjelaskan tentang penentuan kestabilan
dari sistem Lorenz menggunakan metode variabel gradien,
metode
Krasovskii
dan
metode
Energi-Casimir
yang
merupakan pengembangan dari analisis kestabilan dengan
menggunakan fungsi Lyapunov pada sistem persamaan
diferensial tak linier. Selanjutnya dilakukan simulasi dengan
Matlab 2010. Berdasarkan rumusan masalah di atas, batasan
masalah dari Tugas Akhir ini adalah: sigma (rasio viskositas
terhadap konduktivitas termal) sama dengan 10, beta
(perbandingan luas dan ketebalan lapisan) sama dengan
83.
1.4
Tujuan
Berdasarkan rumusan masalah di atas, tujuan dari
penelitian yang diusulkan ini adalah
a. Mendapatkan fungsi Lyapunov dengan menggunakan
metode variabel gradien, metode Krasovskii dan metode
Energi-Casimir pada sistem Lorenz.
4
variabel gradien, metode Krasovskii dan metode
Energi-Casimir pada sistem Lorenz.
1.5
Manfaat
Adapun manfaat Tugas Akhir ini adalah sebagai berikut :
a. Sebagai salah satu referensi bagi peneliti selanjutnya
yang berkaitan dengan analisis kestabilan sistem Lorenz.
b. Memberikan gambaran tahap pengkonstruksi fungsi
Lyapunov pada sistem nonlinier sebagai contoh sistem
Lorenz.
c. Sebagai salah satu kontribusi untuk pengembangan
ilmu pengetahuan pada Matematika Terapan di bidang
sistem dinamik.
1.6
Sistematika Penulisan
Penulisan disusun dalam lima bab, yaitu:
1. BAB I PENDAHULUAN
Bab ini berisi tentang gambaran umum dari penulisan
yang meliputi latar belakang, rumusan masalah, batasan
masalah, tujuan, manfaat, dan sistematika penulisan.
2. BAB II TINJAUAN PUSTAKA
Bab ini membahas landasan teori yang mendasari
penulisan Tugas Akhir.
Didalamnya mencakup
penelitian terdahulu, sistem Lorenz, metode Variabel
Gradien, metode Kravoskii, dan metode Energi Casimir.
3. BAB III METODE PENELITIAN
5
4. BAB IV ANALISIS DAN PEMBAHASAN
Pada bab ini akan dijelaskan secara detail mengenai
pembentukan fungsi Lyapunov dengan menggunakan
tiga metode yaitu metode Variabel gradien, metode
Kravoskii, dan metode Energi Casimir beserta analisis
kestabilan dari masing-masing metode.
5. BAB V PENUTUP
BAB II
TINJAUAN PUSTAKA
Bab ini membahas landasan teori yang mendasari
penulisan Tugas Akhir.
Didalamnya mencakup penelitian
terdahulu, pembentukan fungsi Lyapunov menggunakan
metode Variabel gradien, metode Krasovkii, dan metode
Energi Casimir beserta analisis kestabilan pada
masing-masing metode.
2.1
Penelitian Terdahulu
Penelitian yang berkaitan dengan fungsi Lyapunov dan
sistem Lorenz banyak dilakukan oleh peneliti. Pada tahun
2012, Aldila Sakinah Putri melakukan penelitian yang
berjudul Metode Lyapunov untuk menentukan kestabilan
system persamaan Lorenz.
Dalam penelitiannya untuk
menentukan kestabilan digunakan dua macam metode
Lyapunov yaitu metode Lyapunov pertama dan metode
Lyapunov kedua. Hasil dari penelitian tersebut yaitu dengan
menggunakan metode Lyapunov pertama didapatkan tiga
titik kesetimbangan.
Dan analisa kestabilan pada titik
kesetimbangan, untuk 0
< r <
1 merupakan stabil asimtotik
dengan titik kesetimbangan yang berbentuk node.
Untuk
r
= 1 merupakan stabil dengan titik kesetimbangan yang
berbentuk spiral node. Untuk
r >
470
/
19 merupakan tidak
stabil dengan titik kesetimbangan yang berbentuk spiral
saddle point dengan index 2 sedangkan untuk
r
= 470
/
19
belum dapat ditentukan kestabilannya. Sedangkan metode
Lyapunov kedua dihasilkan turunan parsial fungsi Lyapunov
yang bernilai definit negatif[2].
8
Sedangkan
penelitian
tentang
menentukan
fungsi
Lyapunov dengan menggunakan metode yang berbeda
dengan metode yang digunakan oleh Aldila Sakinah. Dalam
Tesis yang berjudul Konstruksi Fungsi Lyapunov pada Model
Epidemi SIRS oleh Bulqis Nebulla (2016) menghasilkan
bahwa metode variabel gradien dan metode Energi-Casimir
dapat digunakan untuk mengkonstruksi fungsi Lyapunov pada
titik kesetimbangan bebas dan kesetimbangan endemi dan
system yang dihasilkan stabil sedangkan metode Krasovskii
belum dapat dikonstruksi fungsi Lyapunov[3].
Pada Tugas Akhir ini akan dibahas tentang konstruksi
fungsi Lyapunov untuk menentukan kestabilan sistem Lorenz.
2.2
Sistem Lorenz
Sistem Lorenz dikembangkan pada tahun 1963 oleh
Edward Lorenz sebagai model matematika sederhana untuk
konveksi atmosfer, persamaan Lorenz merupakan persamaan
nonlinier tiga dimensi yang terdiri dari sistem deterministik.
Pada awalnya sebagai pendekatan persamaan tertentu yang
mencirikan aliran subjek cair dangkal untuk pendinginan dan
pemanasan secara universal dari atas dan bawah.Model ini
kemudian membentuk system persamaan differensial biasa
sesuai dinamika fluida: sebagai berikut:[4]
9
(rasio viskositas tehadap konduktivitas termal),
r
(perbedaan
temperature antara bagian atas dan bagian bawah lapisan),
dan
β
(perbandingan luas dan ketebalan lapisan).
Mengingat nilai parameter tertentu, persamaan Lorenz
juga dikenal menghasilkan solusi kacau. Kekacauan digunakan
untuk mendefinisikan suatu sistem dimana perubahan
parameter kecil pada kondisi awal menghasilkan pengaruh
besar dalam hasil, atau dikenal sebagai efek kupu-kupu.
Solusi kacau membentuk strange attractor (penarik Lorenz).
Sebuah partikel dengan kondisi awal dalam penarik tersebut
bergerak di dalamnya. Namun gerakan yang sebenarnya dari
partikel tampaknya acak.
Oleh karena itu, sistem Lorenz
adalah sistem deterministik tetapi tidak dapat diprediksi.
Sebenarnya sistem yang dimodelkan oleh persamaan Lorenz
dapat juga menghasilkan solusi yang tidak kacau. Dengan
memberikan kombinasi parameter yang tepat, sejumlah orbit
stabil menuju titik tetap tertentu, berhingga maupun tak
hingga.
2.3
Kestabilan dan Titik Kesetimbangan
Setiap sistem memiliki keadaan setimbang yang
berbeda-beda.
Keadaan setimbang suatu sistem dapat terjadi
pada suatu titik yang disebut titik kesetimbangan.
Titik
kesetimbangan adalah suatu titik saat sistem tidak mengalami
perubahan sepanjang waktu. Sebuah titik
x
e∈
R
nadalah
sebuah titik kesetimbangan dari sistem persamaan diferensial
˙
x
=
f
(
x
) jika memenuhi
f
(
x
e) = 0 .[5]
Kestabilan disekitar titik setimbang
x
edapat ditentukan
dengan memperhatikan nilai-nilai eigen yang diperoleh
persamaan karakteristik.
Secara umum, kestabilan titik
kesetimbangan mempunyai sifat sebagai berikut:
10
adalah bagian realnya negatif.
•
Tidak stabil, jika paling sedikit terdapat satu nilai eigen
yang didapatkan berupa bagian realnya positif.
Fungsi Lyapunov
Fungsi Lyapunov adalah suatu fungsi yang memenuhi tiga
pernyataan berikut ini.
Definisi 2.1[6]
Diberikan fungsi
V
:
D
→
R
dan
x
e∈ D
,titik kesetimbangan sistem persamaan diferensial
nonlinier.Fungsi
V
disebut fungsi Lyapunov jika memenuhi
pernyataan berikut:
•
1. Fungsi
V
kontinu dan mempunyai turunan parsial
pertama yang kontinu pada
D
.
•
2. Fungsi
V
(
x
)
>
0 untuk
x
∈ D
dengan
x
6
=
x
edan
V
(
x
e) = 0 dengan
x
=
x
e(dengan titik kesetimbangan
x
emerupakan titik minimum global).
•
3. Fungsi
V
(
˙
x
)
≤
0 untuk setiap
x
∈ D
Terdapat beberapa tipe kestabilan yang sesuai dengan solusi
nol
x
(
t
)
≡
0 dari sistem nonlinear yang bergantung pada
waktu.
Definisi 2.2[6]
a. Solusi nol
x
(
t
)
≡
0 pada sistem nonlinear yang
bergantung pada waktu adalah stabil Lyapunov jika
sebarang
ε >
0, terdapat
δ
=
δ
ε>
0 sedemikian
sehingga jika
k
x
(0)
k
=
δ
, maka
k
x
(
t
)
k
< ε, t
≥
0.
b. Solusi nol
x
(
t
)
≡
0 pada sistem nonlinear yang
bergantung pada waktu adalah stabil asymptotis lokal
jika solusi nol stabil Lyapunov dan terdapat
δ
1>
0 sedemikan sehingga jika
k
x
(0)
k
<
δ
1,
maka
11
c. Solusi nol
x
(
t
)
≡
0 pada sistem nonlinear yang
bergantung pada waktu adalah stabil asymptotis global
jika solusi nol stabil Lyapunov dan untuk semua
x
(0)
∈
R
nmaka lim
t→∞x
(
t
) = 0.
d. Solusi nol
x
(
t
)
≡
0 pada sistem nonlinear yang
bergantung pada waktu adalah tidak stabil jika solusi
nol bukan stabil Lyapunov.
Teorema 2.1 [6]
Diberikan sistem
x
˙
=
f
(
x
)
dan
x
eadalah titik kesetimbangan
dari sistem tersebut yang memenuhi
f
(
x
e) = 0.
Jika terdapat
fungsi kontinu dimana fungsi
V
:
R
n→
R
sedemikian sehingga
a.
V
(
x
e) = 0
b.
V
(
x
)
>
0 untuk semua
x
6
=
x
ec. ˙
V
(
x
)
<
0 untuk semua
x
6
=
x
ed. jika
k
x
k → ∞
maka
V
(
x
)
→ ∞
Maka
x
eadalah stabil asymptotis global.
2.3.1
Konstruksi Fungsi Lyapunov
Konstruksi fungsi Lyapunov dapat dilakukan dengan
secara langsung yaitu dengan menggunakan beberapa
metode.
Berikut metode-metode untuk mengkonstruksi
fungsi Lyapunov, yaitu [6]:
2.3.2
Metode Variabel Gradien
Diberikan
V
:
D →
R
adalah fungsi diferensial kontinu
dan
g
(
x
) =
∂V∂x T
12
Kemudian, mengkonstruksi
g
(
x
) sedemikian sehingga
g
(
x
)
adalah gradien dari fungsi definit positif dan
V
˙
(
x
) =
g
T(
x
)
f
(
x
)
<
0
, x
∈ D
, x
6
= 0. Fungsi
V
(
x
) bisa dihitung
Fungsi
g
:
R
n→
R
nadalah vektor gradien nilai skalar fungsi
V
:
R
n→
R
njika hanya jika
∂g
iPertama-pertama
harus
memenuhi
sebagai
berikut:
13
differensial sedemikian sehingga
f
(0) = 0.
Maka untuk
setiap
x
∈
R
nterdapat
α
∈
[0
,
1] sedemikian sehingga
g
T(
x
)
f
(
x
) =
g
T(
x
)
∂f ∂x(
αx
)
x
Teorema 2.2 Teorema Krasovkii
Diberikan
x
(
t
) = 0
adalah titik kesetimbangan untuk sistem dinamika non linier
˙
x
(
t
) =
f
(
x
(
t
))
, x
(0) =
x
0, t
≥
0
(2.5)
Dimana
f
:
D →
R
nadalah diferensial kontinu dan
D
adalah
himpunan buka dengan 0
∈ D
. Diasumsikan terdapat matrik
definit positif
P
∈
R
nxndan
R
∈
R
nxnsedemikian sehingga
[
∂f
∂x
(
x
)]
T
P
+
P
[
∂f
∂x
(
x
)]
≥ −
R, x
∈ D
, x
6
= 0
(2.6)
Maka solusi nol
x
(
t
)
=
0 pada persamaan adalah
kesetimbangan tunggal stabil asymptotis dengan fungsi
lyapunov
V
(
x
) =
f
T(
x
)
P f
(
x
). Jika
D ≡
R
n, maka solusi nol
x
(
t
) = 0 pada persamaan adalah ketimbangan tunggal stabil
asymptotis global.
2.3.4
Metode Energi-Casimir
Pada metode ini memanfaatkan keberadaan invarian
dinamika atau pergerakan integral yang disebut fungsi
Casimir dari sistem dinamika nonlinier.
Diberikan fungsi
C
:
D →
R
dan didefinisikan
Teorema 2.3
(Teorema Energi-Casimir) dengan menganggap
sistem dinamika nonlinier dimana
f
:
D →
R
nadalah lipschitz
kontinu pada
D
. Diberikan
x
e∈ D
adalah titik kesetimbangan
14
fungsi Casimir. Diasumsikan bahwa vektor
C
′i
(
x
e)
, i
= 2
, , r
terdapat
α
≥
0 sedemikian sehingga
E
′′(
x
e) +
α
Kemudian, solusi kesetimbangan
x
(
t
)
≡
x
edari sistem
dinamika nonlinier adalah stabil lyapunov dengan fungsi
lyapunov
Khususnya andaikan dapat dikonstruksi suatu fungsi
H
:
D →
R
sedemikian sehingga ˙
H
(
x
) = 0 sepanjang lintasan
dari sistem dinamika nonlinier. Jika
C
1, . . . ,
C
radalah fungi
Casimir maka
∂
∂t
[
H
+
E
(
C
1, . . . ,
C
r)]
x
(
t
) = 0
(2.10)
Untuk setiap fungsi
E
:
R
r→
R
. Oleh karena itu, walaupun
jika
H
tidak definit positif saat titik kesetimbangan
x
e∈ D
fungsi
V
(
x
) =
H
(
x
) +
E
(
C
1(
x
)
, ..,
C
r(
x
)) dapat dibuat definit
k
rv
r= 0 mempunyai paling tidak satu penyelesaian, yaitu
k
1= 0
, k
2= 0
, . . . , k
r= 0. Jika ini adalah satu-satunya
15
2.3.6
Definit Positif dan Negatif
Sifat definit positif dan negatif sebuah fungsi maupun
matriks sangatlah penting saat mengkonstruksi fungsi
Lyapunov. Sebuah fungsi
V
:
D →
R
dan
x
∈ D
dikatakan
[8]:
1. Positif jika
V
(
x
)
>
0 untuk semua
x
6
= 0 dan
V
(0) = 0
2. Semi positif jika
V
(
x
)
≥
0 untuk semua
x
3. Negatif jika
V
(
x
)
<
0 untuk semua
x
0 dan
V
(
x
) = 0
4. Semidefinit negatif jika
V
(
x
)
≥
0 untuk semua
x
Dan sebuah matrik
P
∈
R
nxndikatakan:
1. Definit positif (
P >
0) jika
x
′P x >
0 untuk semua
x
6
= 0
2. Semidefinit positif (
P
≥
0) jika
x
′P x
≥
0 untuk semua
x
3. Definit negatif (
P <
0) jika
x
′P x <
0 untuk semua
x
6
= 0
4. Semidefinit negatif jika (
P
6
= 0) jika
x
′P x
≥
0 untuk
BAB III
METODE PENELITIAN
Bab ini menjelaskan langkah-langkah yang digunakan
dalam penyelesaian masalah pada Tugas Akhir. Disamping
itu, dijelaskan pula prosedur dan proses pelaksanaan tiap-tiap
langkah yang dilakukan dalam menyelesaikan Tugas Akhir.
3.1
Tahapan Penelitian
a. Studi Literatur
Tahap ini dikaji teori-teori yang berkaitan dengan
penelitian tentang mengkonstruksi fungsi Lyapunov
pada sistem nonlinier dengan menggunakan beberapa
metode. Diantaranya metode variabel gradien, metode
Krasovskii, dan Energi-Casimir.
b. Mencari kestabilan lokal
Pada tahap ini dianalisis kestabilan lokal dengan
pelinieran dan analisis kestabilan berdasarkan
nilai-nilai eigen. Metode yang digunakan untuk mengubah
system nonlinier ke sistem linier adalah metode
Jacobian dan dihasilkan matrik Jacobi.
Selanjutnya
titik kesetimbangan yang telah didapatkan dimasukkan
kedalam matrik Jacobi dan dihasilkan nilai eigen-nilai
eigen yang selanjutnya dianalisis kestabilannya.
c. Mengkonstruksi fungsi Lyapunov
Tahap ini dilakukan konstruksi fungsi Lyapunov dengan
beberapa metode.
Metode yang digunakan sebagai
berikut:
1.
Metode variabel gradien
Pada tahap ini yang
18
dilakukan adalah membangun gradien fungsi Lyapunov
yang ingin dicari.
Selanjutnya dicari nilai
a
ijyang
memenuhi proposisi 2.1. kemudian dimasukkan nilai
a
ijyang diperoleh kedalam gradient fungsi Lyapunov tadi.
Kemudian mencari fungsi Lyapunov dan diuji kevalidan
fungsi Lyapunov.
2. Metode Krasovkii
Pada tahap ini yang dilakukan
adalah mencari matriks Jacobi system.
Kemudian
memasukkan nilai titik kesetimbangan dan parameter.
Lalu mencari nilai dari matrik
P
dan matrik
R
harus
definit negatif. Kemudian menghitung fungsi Lyapunov.
Setelah didapatkanfungsi Lyapunov, kemudian diuji
kevalidan fungsi Lyapunov.
3.
Metode Energi-Casimir
Pada tahap ini yang
dilakukan adalah memisalkan fungsi energi casimir
yang memenuhi asumsi, kemudian mencari nilai matrik
E
. Kemudian menghitung fungsi Lyapunov dan diuji
kevalidan fungsi Lyapunov.
d. Menganalisis kestabilan global
Setelah didapatkan fungsi Lyapunov dari
masing-masing metode selanjutnya hasilnya diuji kestabilan
dengan dilihat kedefinitan dan turunannya dilihat
kedefinitannya.
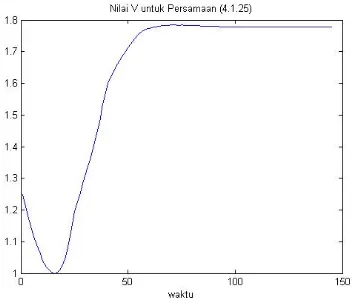
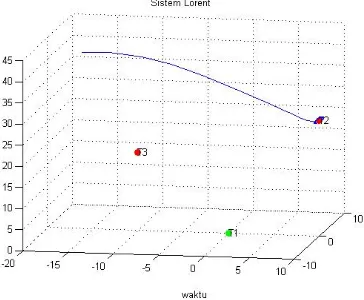
e. Membuat simulasi
Fungsi Lyapunov yang telah didapatkan selanjutnya
dilakukan simulasi dengan menggunakan Matlab.
f. Analisis Hasil dan Kesimpulan
BAB IV
ANALISIS DAN PEMBAHASAN
Pada bab ini dijelaskan tentang titik kesetimbangan,
analisis
kestabilan
sistem,
menganalisis
kestabilan
menggunakan metode dan membandingkan fungsi Lyapunov
menggunakan metode variabel gradien, metode Kravoskii dan
metode Energi-Casimir.
4.1
Sistem Non Linier
Sistem non linier yang digunakan pada pembahasan ini
adalah sistem Lorenz.
Pada sistem Lorenz seperti pada
Persamaan (2.1) akan dilakukan konstruksi fungsi Lyapunov
dengan menggunakan metode Variabel Gradien, metode
Krasovkii, dan metode Energi-Casimir.
4.2
Titik Kesetimbangan
Untuk mendapatkan titik kesetimbangan dari sistem
(2.1)yaitu
f
1(
x, y, z
) =
dxdt,
f
2(
x, y, z
) =
dy
dt
, dan
f
3(
x, y, z
) =
dzdt
dengan (
x, y, z
)
∈
R
3merupakan titik kesetimbangan dari
sistem (2.1), dapat diperoleh jika
dx
sehingga sistem persamaan (2.1) menjadi
σ
(
y
−
x
) = 0
(4.1)
x
(
r
−
z
)
−
y
) = 0
(4.2)
xy
−
βz
= 0
(4.3)
Dari persamaan (4.1) didapatkan
y
=
x
, dengan
σ
adalah
konstanta.
Jika
y
=
x
= 0, maka didapatkan
z
= 0 ,
dengan mengsubstitusikannya pada persamaan (4.3), dengan
20
β
adalah konstanta. Jika
y
=
x
6
= 0, maka persamaan (4.2)
diperoleh
x
=
x
(
r
−
z
)
(4.4)
Jika
x
6
= 0, maka pandang persamaan (4.4) dibagikan
x
sehingga diperoleh 1 = 1(
r
−
z
)
z
=
r
−
1 Substitusikan
z
=
r
−
1 pada persamaan
(4.3), diperoleh
x
2=
bz
=
b
(
r
−
1) Sehingga diperoleh
x
=
±
p
(
b
(
r
−
1)) . Jika b diambil bilangan positif, maka
diperoleh
r
−
1
>
0 atau
r >
1.Jika
r >
1 maka terdapat dua
titik kesetimbangan yaitu (
p
(
b
(
r
−
1))
,
p
(
b
(
r
−
1))
, r
−
1)
dan (
−
p
(
b
(
r
−
1))
,
−
p
(
b
(
r
−
1))
, r
−
1), sedangkan
r <
1
terdapat satu titik kesetimbangan yaitu pada titik (0
,
0
,
0).
4.3
Kestabilan Lokal
Sistem persamaan (2.1) merupakan sistem nonlinier.
Kestabilan dari sistem persaman nonlinier sulit dianalisis,
sehingga untuk memudahkan menganalisis, sistem tersebut
diubah menjadi sistem linier. Metode yang digunakan untuk
mengubah sistem nonlinier menjadi sistem linier adalah
metode matrik Jacobi. Diketahui bahwa
f
1(
x, y, z
) =
σ
(
y
−
x
)
f
2(
x, y, z
) =
x
(
r
−
z
)
−
y
f
3(
x, y, z
) =
xy
−
βz
Matrik Jacobi yang dibentuk dari sistem diatas adalah
J
=
21
Karena
β
,
σ
dan
r
adalah konstanta positif, maka
akar-akar persamaan karakteristik yang diperoleh adalah
λ
1=
−
β,λ
2,3=
−
12(
σ
+1)
±
12p
(
σ
2−
(2 + 4
r
)
σ
+1).
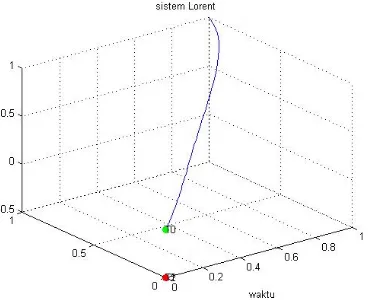
Untuk
r <
1, kondisi didalam akar kuadrat kurang dari
(
σ
−
1)
2, menjadikan
λ <
0 sehingga nilai eigen bernilai
negatif dan riil. Oleh karena itu, titik kesetimbangan pada
titik (0
,
0
,
0) bersifat stabil.
Kemudian titik kesetimbangan
T
2= (
X
∗, Y
∗, Z
∗) =
(
p
β
(
r
−
1)
,
p
β
(
r
−
1)
, r
−
1) disubstitusikan ke dalam
persamaan (4.3.1), sehingga diperoleh matriks
22
Tabel 4.1: Tabel Routh-Hurwitz
λ
3a
1a
3λ
2a
2a
4λ
a
50
λ
0a
6
0
Nilai eigen matriks diperoleh dari
det
(
λ
I − J
) = 0, maka
det
λ
+
σ
−
σ
0
−
1
λ
+1
p
β
(
r
−
1)
−
p
β
(
r
−
1)
−
p
β
(
r
−
1)
λ
+
β
= 0
(
λ
+
σ
)((
λ
+1)(
λ
+
β
) +
β
(
r
−
1)) +
σ
(
λ
(
β
(
r
−
1))
−
(
λ
+
β
) = 0
(
λ
3) + (
β
+
σ
+ 1)
λ
2+ (
σβ
+
βr
)
λ
+ 2
βσ
(
r
−
1) = 0
Selanjutnya, analisis kestabilan pada persamaan diatas
dapat diperoleh dengan menggunakan tabel 4.1
Routh-Hurwitz. Misalkan
a
1λ
3+
a
2λ
2+
a
3λ
+
a
4= 0 maka
a
1= 1;
a
2= (
β
+
σ
+ 1);
a
3= (
σβ
+
βr
);
a
4= 2
βσ
(
r
−
1);
Agar sistem stabil, maka semua suku kolom pertama pada
tabel haruslah bertanda sama maka
a
2,
a
5,
a
6haruslah
bernilai positif. Selanjutnya dihitung nilai
a
5dengan rumus
a
5=
a2a3a−2a1a4,
a
6=
a
4a
5=
(
β
+
σ
+ 1)(
σβ
+
βr
)
−
2
βσ
(
r
−
1)
(
β
+
σ
+ 1)
=
β
2
(
σ
+
r
) +
βσ
2+
βr
+
βσ
(3
−
r
)
23
Nilai
a
5bernilai positif jika
r <
σ(σ+β+3)σ−β−1dengan
r
bernilai
positif ketika
σ > β
+ 1. Selanjutnya dicari nilai
a
6, yaitu
a
6=
a
4= 2
βσ
(
r
−
1)
Untuk
a
6akan bernilai positif jika
r >
1.
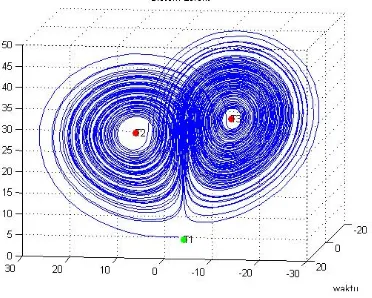
Sehingga
untuk mendapatkan semua nilai bernilai positif jika 1
<
r <
σ(σ+bβ+3)σ−β−1, maka dua titik kesetimbangan
T
2,3=
4.4
Konstruksi Fungsi Lyapunov
Selanjutnya akan dicari kestabilan global titik setimbang
dari sistem Lorenz.
Metode yang digunakan untuk
menganalisis kestabilan global yaitu metode Lyapunov.
Metode ini mengsyaratkan untuk mengkonstruksi sebuah
fungsi yang dapat menganalisis sifat sistem, yang disebut
fungsi Lyapunov.
4.4.1
Metode Variabel Gradien
Metode variabel gradien adalah salah satu metode
yang digunakan untuk membentuk fungsi Lyapunov.Metode
ini membantu pengkonstruksian fungsi Lyapunov secara
sistematis dan terstruktur tetapi terdapat kesulitan dalam
mengevaluasi fungsi Lyapunov.
Langkah-langkah untuk
mendapatkan fungsi fungsi Lyapunov dari sistem sebagai
berikut:
24
Dengan
∇
V
i=
P
nj=1h
ijx
j, i
= 1
, . . . , n, h
ijadalah
sebuah konstanta dan
x
jdalah variabel suatu sistem,
yang memenuhi kondisi curl yaitu
∂x∂2Vi∂xj
=
∇Vi
∂xj
=
∇Vj
∂xi
2. Variabel gradien fungsi Lyapunov
∇
V
digunakan untuk
mencari ˙
V
, dimana ˙
V
= (
∇
V
)
TX
˙
.
3. Fungsi Lyapunov dapat dihitung dengan integral
V
(
x
) =
Z
x0
∇
V
(
x
)d
x
Dengan menggunakan metode variabel gradien.
Diberikan sistem persamaan (2.1) sehingga dimisalkan
∇
V
(
x
) =
Selanjutnya mencari nilai
h
ijyang memenuhi kondisi curl dan
turunan dari fungsi Lyapunov bernilai negatif. Maka turunan
dari fungsi Lyapunov adalah
25
Agar memenuhi kondisi curl yaitu
∂x∂2Vi∂xj
=
Berdasarkan hasil diatas, maka pemilihan
h
ijyang memenuhi
kondisi curl yaitu
h
ij=
h
ji. Sehingga persamaan menjadi
˙
Agar ˙
V
adalah fungsi negatif, maka dipilih semua didalam
kurung pada persamaan (4.7) adalah positif, adalah
•
h
11σ
−
h
12r
+
h
12z
−
h
13y >
0
26
Fungsi Lyapunov diperoleh dengan
27
Dari persamaan (4.8) diperoleh
V
(
X
0, Y
0, Z
0) = 0. Turunan
untuk fungsi Lyapunov (4.8) pada titik kesetimbangan titik
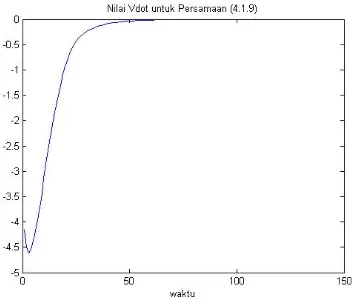
nol adalah
Selanjutnya untuk mengecek turunan
V
diatas adalah negatif,
maka dimasukkan ke dalam program.
Titik kesetimbangan pada dua titik yang lain
Fungsi Lyapunov dengan menggunakan metode Variabel
Gradien telah diperoleh pada persamaan (4.8).
Fungsi
Lyapunov (4.9) dapat dimodifikasi dengan memasukkan titik
kesetimbangan yanga lain yaitu
T
2,3= (
X
∗, Y
∗, Z
∗) =
(
±
p
β
(
r
−
1)
,
±
p
β
(
r
−
1)
, r
−
1) dengan 1
< r <
σ(σ+β+3)σ−β−1sehingga diperoleh fungsi Lyapunov , yaitu
V
=
1
Dimana persamaan diatas didapatkan
V >
0 untuk
x
=
x
∗,
y
=
y
∗, dan
z
=
z
∗serta
V
(
T
2) = 0 dan
V
(
T
3) = 0. Turunan
fungsi Lyapunov pada titik kesetimbangan ini adalah
28
Maka diperoleh ˙
V
(
T
2,3) = 0,karena persamaan (4.11) tidak
terlihat bahwa ˙
V <
0 untuk semua
X
,
Y
, dan
Z
. Selanjutnya,
untuk mengecek turunan dari adalah negatif, maka dicek
dengan memasukkan ke program.
4.4.2
Metode Krasovkii
Berdasarkan teorema 2.2, maka langkah pertama untuk
mengkonstruksi fungsi Lyapunov adalah mendapatkan matrik
Jacobi dari sistem (2.1), yaitu
J
=
−
σ
σ
0
r
−
z
−
1
−
x
y
x
−
β
(4.12)
Titik kesetimbangan pada titik asal yaitu
T
1=
(
X
0, Y
0, Z
0) = (0
,
0
,
0) disubstitusikan pada matriks J,
sehingga diperoleh matriks
J
(
T
1) =
−
σ
σ
0
r
−
1
0
0
0
−
β
(4.13)
29
Berdasarkan
metode
Krasovkii,
kondisi
titik
kesetimbangan menjadi stabil asymptotis pada
F
(
x
) =
J
TP
+
P
J
+
R
= 0 atau
J
TP
+
P
J
=
−
R
, dengan
R
adalah matriks identitas. Nilai
P
ijdapat diperoleh dengan
30
(tanpa tahun) adalah sebagai berikut
σ
= 10 ,
β
=
83. Dengan
bantuan program Matlab maka diperoleh
P
=
31
Selanjutnya turunan
V
adalah
˙
dengan memasukkan
T
1pada persaman(4.15) diperoleh
˙
V
(
T
1) = 0. Selanjutnya untuk mengecek turunan
V
diatas
adalah negatif, maka dimasukkan ke dalam program.
Titik kesetimbangan pada dua titik yang lain
Dua titik kesetimbangan yaitu
T
2= (
X
∗, Y
∗, Z
∗) =
(
±
p
β
(
r
−
1)
,
±
p
β
(
r
−
1)
, r
−
1) dengan 1
< r <
σ(σ+β+3)σ−β−1disubstitusikan pada matriks
J
, sehingga diperoleh matriks
J
(
T
2) =
33
Kondisi titik kesetimbangan menjadi stabil asymptotis
pada
F
(
x
) =
J
TP
+
P
J
+
R
= 0 atau
J
TP
+
P
J
=
−
R
,
dengan
R
adalah matriks identitas, maka
R
11=
−
2
σP
11+
P
21+
P
12+
c
(
P
31+
P
13) =
−
1
R
12=
−
σP
12+
P
22+
cP
32+
σP
11−
P
12+
cP
13= 0
R
13=
−
σP
13+
P
23+
cP
33−
cP
12−
βP
13= 0
R
21=
P
11−
(1 +
σ
)
P
21+ (
P
31+
P
23) +
P
22= 0
R
22=
P
12−
P
22+
cP
32+
σP
21−
P
22+
cP
23=
−
1
R
23=
P
13−
P
23+
cP
33+
−
cP
22−
βP
23= 0
R
31=
−
2
cP
21−
(
σ
+
β
)
P
31+
P
32+
cP
33= 0
R
32=
−
cP
22−
βP
32+
σP
31−
P
32+
cP
33= 0
R
33=
−
cP
23−
βP
33−
cP
32−
βP
33=
−
1
Nilai
P
ijdapat diperoleh dengan memasukkan nilai
parameter yang diperoleh dari O.Knill adalah sebagai berikut
σ
= 10 ,
β
= 8
/
3 dan 1
< r <
σ(σ+β+3σ−β−1= 24
.
7. Diambil
r
= 24 dan dengan program Matlab maka diperoleh
P
=
P
11P
12P
13P
21P
22P
23P
31P
32P
33
=
0
,
1346 0
,
2943
0
.
0050
0
.
0448
0
.
4694
−
0
.
2792
0
.
1676
0
.
1766
0
,
3381
34
35
Karena hasil yang terlihat belum terlihat bahwa ˙
V
adalah
negatif. Selanjutnya untuk mengecek turunan diatas adalah
negatif, maka dimasukkan ke dalam program.
Titik kesetimbangan
T
3= (
−
Langkah yang kedua yaitu mendapatkan matrik P
memenuhi persamaan (2.6).
Misalkan
R
=
J
TP
+
P J
36
37
dengan
R
adalah matriks identitas, maka
R
11=
−
2
σP
11+
P
21+
P
12+
c
(
P
31+
P
13) =
−
1
R
12=
−
σP
12+
P
22+
cP
32+
σP
11−
P
12+
cP
13= 0
R
13=
−
σP
13+
P
23+
cP
33−
cP
12−
βP
13= 0
R
21=
σP
11−
(1 +
σ
)
P
21+ (
P
31+
P
23) +
P
22= 0
R
22=
σP
12−
P
22+
cP
32+
σP
21−
P
22+
cP
23=
−
1
R
23=
σP
13−
P
23+
cP
33+
−
cP
22−
βP
23= 0
R
31=
−
2
cP
21−
(
σ
+
β
)
P
31+
P
32+
cP
33= 0
R
32=
−
cP
22−
βP
32+
σP
31−
P
32+
cP
33= 0
R
33=
−
cP
23−
βP
33−
cP
32−
βP
33=
−
1
dimana
c
=
−
p
β
(
r
−
1).
Nilai
P
ijdapat diperoleh dengan memasukkan nilai
parameter yang diperoleh dari O.Knill adalah sebagai berikut
σ
= 10 ,
β
= 8
/
3 dan 1
< r <
σ(σ+β+3σ−β−1= 24
.
7.Diambil
r
= 24
dan dengan program Matlab maka diperoleh
P
=
P
11P
12P
13P
21P
22P
23P
31P
32P
33
=
−
5
,
6421
−
15
,
1891
−
0
,
6584
0
,
3580
−
27
,
2288
−
23
,
1679
11
,
9840
11
,
3115
−
17
,
2225
38
39
Karena hasil yang terlihat belum terlihat bahwa ˙
V
adalah
negatif.
Selanjutnya untuk mengecek turunan dari diatas
adalah negatif dengan dimasukkan ke dalam program.
4.4.3
Metode Energi-Casimir
Pada metode Energi-Casimir, langkah yang digunakan
untuk mengkonstruksi fungsi Lyapunov pada sistem (2.1)
adalah sebagai berikut: Terdapat konstanta Lipschitz
k
(
t
)
yang memenuhi
k
f
(
x
1(
t
)
, t
)
−
f
(
x
2(
t
)
, t
)
k ≤
k
(
t
)
k
x
1−
x
2k
40
dx
dt
=
f
(
x
(
t
)
, t
)
dy
dt
=
f
(
y
(
t
)
, t
)
dz
dt
=
f
(
z
(
t
)
, t
)
Misalkan terdapat vektor
x
= (
x
1, x
2)
, y
= (
y
1, y
2),
dan
z
= (
z
1, z
2).
Selanjutnya akan dicari nilai
k
(
t
) yang
merupakan konstanta Lipschitz yang memenuhi
k
f
(
x
1(
t
)
, t
)
−
f
(
x
2(
t
)
, t
)
k ≤
k
(
t
)
k
x
1−
x
2k
dengan
k
f
(
x
1(
t
)
, t
)
−
f
(
x
2(
t
)
, t
k
=
k
a
11a
21a
31
k
Berdasarkan sistem persamaan (2.1) dapat dibentuk
sebagai berikut
•
a
11=
σ
(
y
1−
x
1)
−
σ
(
y
2−
x
2) =
σ
(
y
1−
y
2)
−
σ
(
x
1−
x
2)
Misalkan
σ
(
y
1−
y
2) =
δ
1(
t
)(
x
1−
x
2) maka
a
11= (
δ
1(
t
)
−
σ
)(
x
1−
x
2) Maka didapatkan
|
a
11|
=
|
(
δ
1(
t
)
−
σ
)(
x
1−
x
2)
| ≤ |
(
δ
1(
t
)
−
σ
)
||
(
x
1−
x
2)
|
(4.22)
•
a
21=
rx
1−
y
1−
x
1z
1−
(
rx
2−
y
2−
x
2z
2) =
r
(
x
1−
x
2)
−
(
y
1−
y
2)
−
(
x
1z
1−
x
2z
2) Misalkan
r
(
x
1−
x
2) =
δ
2(
t
)(
y
1−
y
2)
dan (
x
1z
1−
x
2z
2) =
δ
3(
t
)(
y
1−
y
2) Maka
a
21= (
δ
2(
t
)
−
1
−
δ
3(
t
))(
y
1−
y
2)
Sehingga didapatkan
|
a
21|
=
|
(
δ
2(
t
)
−
1
−
δ
3(
t
))(
y
1−
y
2)
| ≤ |
(
δ
2(
t
)
−
1
−
δ
3(
t
))
||
(
y
1−
y
2)
|
41
Selanjutnya persamaan (4.22), (4.23) dan (4.24) dapat
dituliskan sebagai berikut
Maka sistem memenuhi kondisi Lipschitz.
Misalkan fungsi casimir dengan syarat
C
i′(
x
e) adalah bebas
linier. Pada sistem (2.1) dengan titik kesetimbangan memiliki
variabel berjumlah 3, maka
n
= 3. Karena itu, fungsi Casimir
yang dimisalkan ada dua. Misalkan
C
1=
(x)2
bebas linier. Langkah selanjutnya adalah menghitung
E
(
x
)
,
42
Yang memenuhi syarat
E
′(
x
e) = 0 dan
x
TE
Selanjutnya dengan memilih sebarang
µ
1dan
µ
2adalah
43
Karena telah memenuhi asumsi pada langkah selanjutnya
akan dibuktikan bahwa
Maka fungsi Lyapunov pada titik kesetimbangan
T
1= (0
,
0
,
0)
44
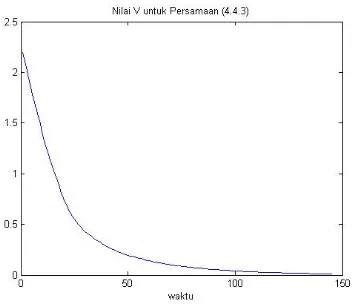
Fungsi Lyapunov (4.25) adalah definit positif, karena
V
(
x
)
>
0 untuk semua
x, y, z
serta
V
(
T
1) = 0.
Turunan dari
Titik kesetimbangan pada dua titik yang lain
Berdasarkan
langkah
yang
telah
dijabarkan
pada
sebelumnya. Selanjutnya dicari fungsi Lyapunov untuk dua
titik kesetimbangan yang lain yaitu
T
2,3= (
X
∗, Y
∗, Z
∗) =
(
±
p
β
(
r
−
1)
,
±
p
β
(
r
−
1)
, r
−
1) dengan 1
< r <
σ(σ+β+3)σ−β−1Pada sistem (2.1) dengan titik kesetimbangan
T
2,3memiliki
variabel berjumlah 3, maka
n
= 3.
Karena itu, fungsi
Casimir yang dimisalkan ada dua. Misalkan
C
1=
b(y)2