PEMBUATAN ROBOT PENJEJAK GARIS DENGAN PEMETAAN POSISI MENGGUNAKAN JARINGAN NIRKABEL
Nama, NPM : Reza Kurniawan, 21107407 Pembimbing : Dr. -Ing. Farid Thalib E-Mail : drop2death@gmail.com
ABSTRAK
Robot penjejak garis merupakan suatu bentuk robot bergerak otonom yang mempunyai misi mengikuti suatu garis pandu yang telah ditentukan secara otonom. Selain itu, robot ini juga melakukan pemetaan posisi. Sistem terdiri atas perangkat keras dan perangkat lunak. Perangkat keras terdiri atas mikrokontroler AT89S51, rangkaian sensor photodioda, rangkaian driver motor DC IC L298. Perangkat lunak mikrokontroler dalam penelitian ini dibuat dengan menggunakan bahasa assembler dan Delphi 7 untuk antarmukanya. Sistem ini bekerja setelah ditekannya tombol reset pada mikrokontroler kemudian mikrokontroler menerima data dari sensor photodioda, dari mikrokontroler akan mengirim data ke driver motor DC L298. Setelah mengirim data ke driver motor DC, mikrokontroler mengontrol sistem gerak dari motor DC. Robot juga akan terus mengirimkan sinyal kepada perangkat penerima untuk pemetaan posisinya. Sistem ini telah terealisasi dan dapat menggerakkan motor DC ke arah yang telah ditentukan dari masukan sensor photodiode. Motor akan berbelok ke kiri maka yang terjadi motor kanan akan berputar sedangkan motor mati dan sebaliknya.
Kata Kunci : Mikrokontroler, Photodioda, Sensor Garis, Pemetaan Posisi
PENDAHULUAN
Dalam dunia industri, kegiatan distribusi merupakan proses yang sangat penting disamping proses produksi. Kegiatan distribusi dapat bermacam - macam jenisnya, salah satunya distribusi antar divisi. Kegiatan distribusi antar divisi satu dengan divisi lainnya selama ini masih menggunakan perantara kurir atau menggunakan kendaraan operasional yang dikendalikan secara manual. Dengan padatnya proses distribusi maka kendaraan secara manual dirasakan sangat menghambat kerja distribusi. Selain itu tingkat kesalahannya ( human error ) sangat tinggi dan berbanding terbalik dengan tingkat efisiensi yang rendah.
Semakin berkembangnya teknologi membuat orang berpikir bagaimana membuat sebuah kendaraan yang dapat membantu kegiatan distribusi antar divisi tapi diopersikan secara otomatis.Salah satunya melalui penggunaan Robot pencari jejak garis. Robot ini dapat menjejak garis secara otomatis sehingga dapat diterapkan pada kegiatan distribusi antar divisi.
Robot memudahkan manusia dalam pekerjaannya dimana mereka tidak perlu lagi mengendarai kendaraan pengangkut untuk distribusi, melainkan hanya tinggal mengaktifkan robot tersebut dan membiarkan robot tersebut melakukan tugasnya. Kendalanya adalah ketika robot tersebut keluar dari jalur dan kita tidak tahu didaerah mana robot tersebut keluar jalur.
Maka dibuatlah suatu alat yaitu Robot Penjejak Garis Dengan Pemetaan Posisi Menggunakan Jaringan Nirkabel yang dapat menjejak garis secara otomatis dengan menggunakan jaringan Tanpa Kabel yang terhubung dengan komputer dan dapat dimonitor posisinya serta dapat dikendalikan secara manual melalui komputer jika robot tersebut keluar jalur.
Dengan adanya robot yang dapat mengantar barang secara otomatis tentu bahaya terhadap pekerja tidak akan terjadi dan pekerjaan akan lebih cepat. Dalam penelitian ini penulis membuat sebuah prototipe robot yang dapat mendeteksi garis / jalur dengan AT89S51 sebagai pusat kendali. Selanjutnya
robot akan membawa barang ke tempat tujuan secara otomatis.
TINJAUAN PUSTAKA
Mikrokontroler AT89S51
AT89S51 adalah sebuah mikro- kontroler 8 bit bertenaga rendah dengan teknologi CMOS berkinerja tinggi yang dilengkapi memori flash yang dapat diprogram sebesar 8 Kbyte. Komponen ini dibuat dengan teknologi memori atmel yang nonvolatile dan berkapasitas tinggi serta kompatibel dengan set instruksi dan pin out standar industri 80CSI. Flash on-chip memungkinkan memori program diprogram ulang dalam sistem atau oleh pemrograman memori nonvolatile yang konvensional. Dengan menggunakan CPU 8 bit dengan flash yang diprogram dari sistem dalam sebuah monolithic ship, Atmel AT89S51 adalah sebuah mikrokontroler yang sangat baik untuk menyediakan solusi yang sangat fleksibel dan efektif dalam biaya, untuk banyak dalam masalah aplikasi, serta untuk mengontrol modul tambahan
Gambar 1 Port Mikrokontroler AT89S51 [2] Kapabilitas detail dari AT89S51 adalah sebagai berikut:
a. Sebuah CPU (Central Processing Unit) 8 bit yang termasuk keluarga MCS51.
b. 4Kbytes Flash EEROM dengan kemampuan sampai 1000 kali tulis-hapus. 128 x 8-bit internal RAM.
c. Empat buah port masukan dan keluaran dengan masing – masing terdiri atas 8 jalur.
d. Dua buah timer counter 16 bit. e. Lima buah jalur interupsi (2
interupsi external dan 3 interupsi internal)
f. sebuah port serial dengan kontrol serial full duplex UART
g. kemampuan melaksanakan operasi perkalian, pembagian dan operasi boolean (bit)
h. kecepatan pelaksanaan intruksi per siklus 1 mikrodetik dan frekuensi clock 12MHz
Sensor Garis Photodioda
Photodioda dibuat dari
semikonduktor dengan bahan yang populer adalah silicon (Si) atau galium arsenida (GaAs), dan yang lain meliputi InSb, InAs, PbSe.
Photodioda digunakan sebagai penangkap gelombang cahaya yang dipancarkan oleh LED. Besarnya tegangan atau arus listrik yang dihasilkan oleh photodioda tergantung besar kecilnya radiasi yang dipancarkan oleh LED.
Gambar 2 Grafik Photodioda [4] Inframerah
Dioda infra merah memiliki semua dari sifat cahaya yang tampak, namun kita
tidak dapat melihatnya secara normal. Cahaya infra merah mempunyai beberapa keuntungan dimana cocok digunakan sebagai sensor. Bentuk serta ukurannya pun hampir tidak jauh berbeda dengan LED. Dioda infra merah dapat memancarkan cahaya infra merah biasa. Dan ini biasanya digunakan untuk mengontrol VCR atau TV, Encoder, sistem keamanan dan lain sebagainya.
Gambar 3 Simbol inframerah Komparator
IC LM324 merupakan IC Operational Amplifier, IC ini mempunyai 4 buah op-amp yang dapat berfungsi sebagai komparator. IC ini mempunyai tegangan kerja antara +5V sampai +15V untuk +Vcc dan 5V sampai -15V untuk -Vcc.
Dengan menggunakan komparator LM324 maka tegangan yang dihasilkan oleh sensr garis akan dibandingkan dengan tegangan dari potensiometer. Tegangan potensiometer tersebut bervariasi antara 0 volt sampai 9 volt DC. Berikut rumus penghitungan tegangan keluaran pada komparator :
Vo = (Va) – (Vb) + 90%VCC (1)
dengan :
Vo = tegangan keluaran yang dihasilkan oleh komparator (volt),
Va = tegangan masukan di kaki non-inverting (volt),
Vb = tegangan masukan di kaki inverting (volt),
+ 90% VCC = tegangan keluaran maksimal komparator, yang diperoleh dari 90% tegangan VCC atau ground.
Gambar 5 Grafik Komparator[11]
Motor DC
Roda digerakkan menggunakan dua buah motor DC yang dipasang pada roda sebelah kiri dan kanan. Motor DC merupakan peralatan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Secara umum, kecepatan putaran poros motor DC akan meningkat seiring dengan meningkatnya tegangan yang diberikan. Dengan demikian, putaran motor DC akan berbalik arah jika polaritas tegangan yang diberikan juga dirubah.
Untuk menjalankan motor DC dengan PWM tidak dapat digunakan relay, melainkan harus menggunakan rangkaian driver motor DC lainnya. Rangkaian ini yang paling sederhana berupa transistor yang disusun secara Darlington. Transistor yang dipakai dapat berupa transistor jenis NPN tipe BC547. Rangkaian ini mampu mengalirkan sampai arus 100 mA DC.
Apabila diinginkan motor DC dapat bergerak 2 arah, maka diperlukan menyusun rangkaian H-Bridge. Selain transistor, dapat juga digunakan IC driver motor DC khusus maupun berupa modul.
Penggerak Motor DC
IC L293D ini adalah suatu bentuk rangkaian daya tinggi terintegrasi yang mampu melayani 4 buah beban dengan arus nominal 600mA hingga maksimum 1.2 A. Keempat channel inputnya didesain untuk dapat menerima masukan level logika TTL. Biasa dipakai sebagai driver relay, motor DC, motor steper maupun pengganti transistor sebagai saklar dengan kecepatan switching mencapai 5kHz. Driver tersebut berupa dua pasang rangkaian h-bridge yang masing-masing dikendalikan oleh enable 1 dan enable 2.
Gambar 7 Skematik pin IC L293D [8]
Gambar rangkaian dan cara kerjanya cukup sederhana yakni Dengan memberikan tegangan 5V sebagai Vcc pada pin 16 dan 9 Volt pada pin 8 untuk tegangan motor, maka IC siap digunakan. Saat terdapat tegangan pada input 1,2 dengan memberikan logika tinggi pada enable1, maka output 1,2 akan aktif. Sedangkan jika enable1 berlogika rendah, meskipun terdapat tegangan pada input1 dan 2, output tetap nol (tidak aktif). Hal ini juga berlaku untuk input dan output 3,4 serta enable2.
Antarmuka
Dalam sistem ini menggunakan komunikasi serial. Secara fisik, pembaca disambungkan ke suatu port serial pada komputer dengan menggunakan konektor RS-232 serial. Peralatan pada komunikasi serial port dibagi menjadi 2 (dua) kelompok yaitu Data Communication Equipment (DCE) dan Data Terminal Equipment (DTE). Spesifikasi elektronik dari serial port merujuk pada Electronic Industry Association (EIA) : 1. “Space” (logika 0) ialah tegangan antara +
3 hingga +25 V.
2. “
Mark” (logika 1) ialah tegangan antara –3 hingga –25 V.
3. Daerah antara + 3V hingga –3V tidak didefinisikan /tidak terpakai
4. T
egangan open circuit tidak boleh melebihi 25 V.
5. Arus hubungan singkat tidak boleh melebihi 500mA.
Komunikasi serial membutuhkan port sebagai saluran data. Pengiriman data serial pada komputer menggunakan standar RS-232, sedangkan mikroktroler menggunakan standar TTL. Agar keduanya dapat berinteraksi, maka diperlukan rangkaian antarmuka sehingga perangkat-perangkat dapat saling berhubungan. Rangkaian antarmuka yang akan digunakan adalah rangkaian antarmuka pengubah standar RS-232 ke standar TTL, yaitu dengan menggunakan IC MAX232. Kode ASCII
Kode Standar Amerika untuk Pertukaran Informasi atau ASCII (American Standard Gambar 6 Rangkaian Motor DC [7]
Code for Information Interchange) merupakan suatu standar internasional dalam kode huruf dan simbol seperti Hex dan Unicode tetapi ASCII lebih bersifat universal, contohnya 124 adalah untuk karakter "|". Ia selalu digunakan oleh komputer dan alat komunikasi lain untuk menunjukkan teks. Kode ASCII sebenarnya memiliki komposisi bilangan biner sebanyak 8 bit. Dimulai dari 0000 0000 hingga 1111 1111. Total kombinasi yang dihasilkan sebanyak 256, dimulai dari kode 0 hingga 255 dalam sistem bilangan.
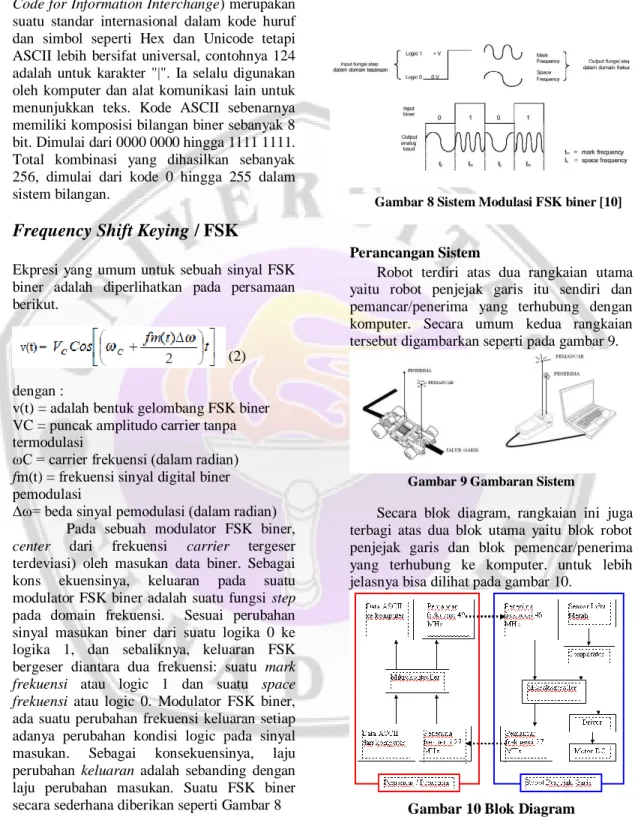
Frequency Shift Keying / FSK
Ekpresi yang umum untuk sebuah sinyal FSK biner adalah diperlihatkan pada persamaan berikut.
(2)
dengan :
v(t) = adalah bentuk gelombang FSK biner VC = puncak amplitudo carrier tanpa termodulasi
ωC = carrier frekuensi (dalam radian) fm(t) = frekuensi sinyal digital biner pemodulasi
Δω= beda sinyal pemodulasi (dalam radian) Pada sebuah modulator FSK biner, center dari frekuensi carrier tergeser terdeviasi) oleh masukan data biner. Sebagai kons ekuensinya, keluaran pada suatu modulator FSK biner adalah suatu fungsi step pada domain frekuensi. Sesuai perubahan sinyal masukan biner dari suatu logika 0 ke logika 1, dan sebaliknya, keluaran FSK bergeser diantara dua frekuensi: suatu mark frekuensi atau logic 1 dan suatu space frekuensi atau logic 0. Modulator FSK biner, ada suatu perubahan frekuensi keluaran setiap adanya perubahan kondisi logic pada sinyal masukan. Sebagai konsekuensinya, laju perubahan keluaran adalah sebanding dengan laju perubahan masukan. Suatu FSK biner secara sederhana diberikan seperti Gambar 8
.
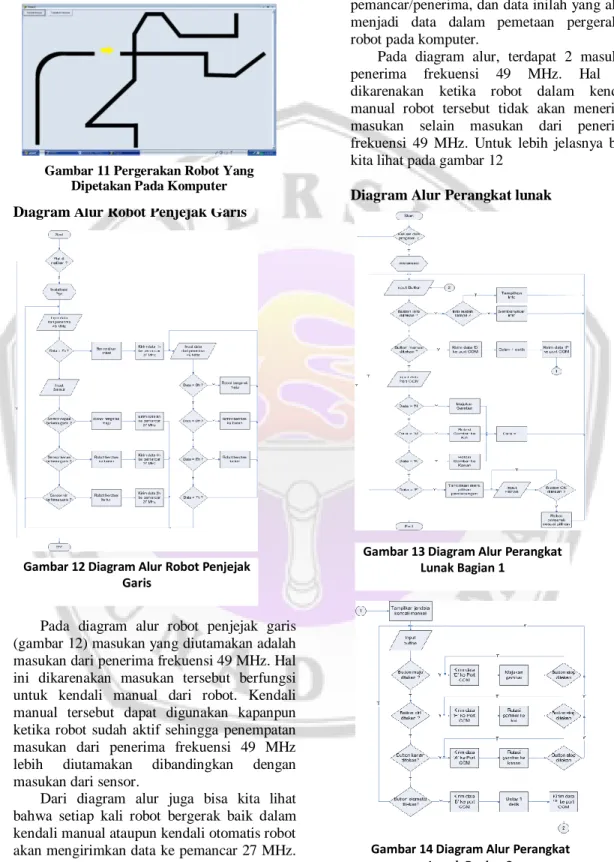
Perancangan Sistem
Robot terdiri atas dua rangkaian utama yaitu robot penjejak garis itu sendiri dan pemancar/penerima yang terhubung dengan komputer. Secara umum kedua rangkaian tersebut digambarkan seperti pada gambar 9.
Gambar 9 Gambaran Sistem
Secara blok diagram, rangkaian ini juga terbagi atas dua blok utama yaitu blok robot penjejak garis dan blok pemencar/penerima yang terhubung ke komputer. untuk lebih jelasnya bisa dilihat pada gambar 10.
Gambar 10 Blok Diagram Gambar 8 Sistem Modulasi FSK biner [10]
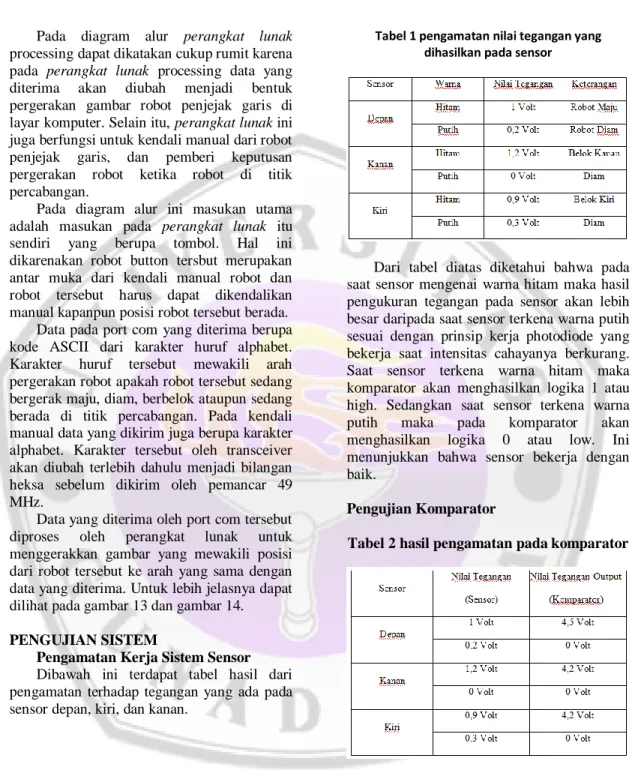
Diagram Alur Robot Penjejak Garis
Pada diagram alur robot penjejak garis (gambar 12) masukan yang diutamakan adalah masukan dari penerima frekuensi 49 MHz. Hal ini dikarenakan masukan tersebut berfungsi untuk kendali manual dari robot. Kendali manual tersebut dapat digunakan kapanpun ketika robot sudah aktif sehingga penempatan masukan dari penerima frekuensi 49 MHz lebih diutamakan dibandingkan dengan masukan dari sensor.
Dari diagram alur juga bisa kita lihat bahwa setiap kali robot bergerak baik dalam kendali manual ataupun kendali otomatis robot akan mengirimkan data ke pemancar 27 MHz. Data yang dikirim itu akan diterima oleh
pemancar/penerima, dan data inilah yang akan menjadi data dalam pemetaan pergerakan robot pada komputer.
Pada diagram alur, terdapat 2 masukan penerima frekuensi 49 MHz. Hal ini dikarenakan ketika robot dalam kendali manual robot tersebut tidak akan menerima masukan selain masukan dari penerima frekuensi 49 MHz. Untuk lebih jelasnya bisa kita lihat pada gambar 12
Diagram Alur Perangkat lunak Gambar 11 Pergerakan Robot Yang
Dipetakan Pada Komputer
Gambar 12 Diagram Alur Robot Penjejak Garis
Gambar 13 Diagram Alur Perangkat Lunak Bagian 1
Gambar 14 Diagram Alur Perangkat Lunak Bagian 2
Pada diagram alur perangkat lunak processing dapat dikatakan cukup rumit karena pada perangkat lunak processing data yang diterima akan diubah menjadi bentuk pergerakan gambar robot penjejak garis di layar komputer. Selain itu, perangkat lunak ini juga berfungsi untuk kendali manual dari robot penjejak garis, dan pemberi keputusan pergerakan robot ketika robot di titik percabangan.
Pada diagram alur ini masukan utama adalah masukan pada perangkat lunak itu sendiri yang berupa tombol. Hal ini dikarenakan robot button tersbut merupakan antar muka dari kendali manual robot dan robot tersebut harus dapat dikendalikan manual kapanpun posisi robot tersebut berada. Data pada port com yang diterima berupa kode ASCII dari karakter huruf alphabet. Karakter huruf tersebut mewakili arah pergerakan robot apakah robot tersebut sedang bergerak maju, diam, berbelok ataupun sedang berada di titik percabangan. Pada kendali manual data yang dikirim juga berupa karakter alphabet. Karakter tersebut oleh transceiver akan diubah terlebih dahulu menjadi bilangan heksa sebelum dikirim oleh pemancar 49 MHz.
Data yang diterima oleh port com tersebut diproses oleh perangkat lunak untuk menggerakkan gambar yang mewakili posisi dari robot tersebut ke arah yang sama dengan data yang diterima. Untuk lebih jelasnya dapat dilihat pada gambar 13 dan gambar 14.
PENGUJIAN SISTEM
Pengamatan Kerja Sistem Sensor Dibawah ini terdapat tabel hasil dari pengamatan terhadap tegangan yang ada pada sensor depan, kiri, dan kanan.
Tabel 1 pengamatan nilai tegangan yang dihasilkan pada sensor
Dari tabel diatas diketahui bahwa pada saat sensor mengenai warna hitam maka hasil pengukuran tegangan pada sensor akan lebih besar daripada saat sensor terkena warna putih sesuai dengan prinsip kerja photodiode yang bekerja saat intensitas cahayanya berkurang. Saat sensor terkena warna hitam maka komparator akan menghasilkan logika 1 atau high. Sedangkan saat sensor terkena warna putih maka pada komparator akan menghasilkan logika 0 atau low. Ini menunjukkan bahwa sensor bekerja dengan baik.
Pengujian Komparator
Tabel 2 hasil pengamatan pada komparator
Nilai tegangan sensor pada tabel diatas digunakan untuk acuan jika akan melakukan penghitungan tegangan output menggunakan rumus komparator yaitu Untuk Pemantulan Sempurna :
Vout = sign ( Vb – Va ) * 90% Vcc = sign ( 0,2 – 1 ) * 90% Vcc = ( - 0,8) * 90 % Vcc
= 90% x ground = 0 Volt (Ground)
Sedangkan untuk perhitungan pemantulan tidak sempurna : Vcc = 5 Volt Vout = sign ( Vb – Va ) * 90% Vcc = sign ( 1 – 0 ) * 90% Vcc = ( 1) * 90% Vcc = 90% x 5 Volt = 4.5 Volt
Namun demikian hasil tegangan output pada sensor kanan dan kiri hanya didapat sebesar 4.2 volt kemungkinan ini disebabkan oleh perbedaan hambatan pada potensiometer.
Pengujian Jarak Tempuh Robot dan Data yang diterima
Tabel 3 Perbandingan Jarak dan Jumlah Data yang diterima
Pada tabel 3 dapat dilihat bahwa perbandingan jarak 1 cm dengan data yang diterima adalah 1 : 1,933. Jika dibulatkan, jumlah perbandingan yang digunakan adalah 1 : 2. Perbandingan inilah yang akan digunakan dalam kalibrasi antara robot dengan komputer dalam pemetaan posisi ketika robot bergerak maju.
P E N U T U P Simpulan
Dari hasil pengujian terhadap sensor garis terbukti handal dalam mendeteksi pembeda antara permukaan hitam atau putih. Faktor kegagalan robot dalam pemetaan posisi karena adanya jeda waktu antara robot bergerak dengan data yang dikirimkan. Saat robot keluar jalur, walaupun tetap mengirimkan data ke pemancar/penerima tetapi tetap ada jeda waktu yang dibutuhkan.
Saran
Hasil penetilian ini masih perlu disempurnakan untuk menghasilkan robot yang handal. Berikut adalah beberapa saran yang bisa dikembangkan antara lain, menempatkan posisi sensor setepat mungkin terutama untuk sensor kiri dan kanan, sistem jalur robot dibuat berupa labirin dan memanfaatkan sensor warna untuk membedakan warna tidak hanya warna dasar saja, Daftar Pustaka [1]Anonim,http://diasthea.blogspot.com/2010/10/ mikrokontroler.html, Oktober 2010 [2] Anonim, http://mylifemyidea.com/tag/at89s51 , maret 2011 [3] gerbang sirkuit, http://www.scribd.com/doc/33785845/Arsitekt ur-AT89S51 januari 2009 [4] Steffany, http://steffanyyc.blogspot.com/, Oktober 2010 [5] Anonim, http://dulurbelajar.blogspot.com/2011/05/led.h tml, Mei 2011 [6] Anonim, http://pinout-circuits-images.dz863.com/54/LM324.jpg, 2008 [7] Anonim, http://www.mikron123.com/index.php/Ap likasi-Motor/Pengendalian-Motor-DC-PWM.html, 2010 [8] Fauzan A Mahanani, http://fauzan.smkdarunnajah.sch.id/2011/09/sk ema-rangkaian-l293d-sebagai-driver.html, September 2011 [9] Anonim, http://id.wikipedia.org/wiki/ASCII september 2011 [10] sukiswo, http://www.elektro.undip.ac.id/transmisi/des05 /sukiswodes05.PDF september 2011 [11] Yudi Djohan ,http://yudidjohan.wordpress.com/2011/03/16/ rangkaian-komunikasi-serial-rs232, maret 2011
[12] Ardhian Mustafa, 2010, Robot Pencari Jejak Garis Dengan Pemetaan Menggunakan Jaringan Nirkabel dan Antarmuka Delphi 7 [13
0/12/sensor-cahaya-dengan-komparator.html desember2010
[14] Nurfajria Muchlis, 2011, Pembuatan Robot Ziobot Untuk Penjejak Garis dan Pengangkat Barang Menggunakan Sensor Jarak Berbasis Mikrokontroler
![Gambar 1 Port Mikrokontroler AT89S51 [2] Kapabilitas detail dari AT89S51 adalah sebagai berikut:](https://thumb-ap.123doks.com/thumbv2/123dok/2669448.2254869/2.918.165.801.191.1018/gambar-port-mikrokontroler-at-kapabilitas-detail-at-berikut.webp)

![Gambar 7 Skematik pin IC L293D [8]](https://thumb-ap.123doks.com/thumbv2/123dok/2669448.2254869/4.918.169.803.188.996/gambar-skematik-pin-ic-l-d.webp)