4. PENGUJIAN SISTEM
Pada bab ini akan dilakukan pengujian sistem secara keseluruhan yang dibagi menjadi beberapa tahapan yaitu :
Pengujian program Arduino yang telah dibuat sehingga dapat mengetahui ketepatan pengukuran kemiringan medan uji coba. Pengujian ini dilakukan untuk mengetahui ketepatan pengukuran kemiringan medan berdasar pada pembacaan sensor accelerometer setelah diatur oleh Arduino.
Pengujian program Arduino yang telah dibuat sehingga dapat mengetahui ketepatan perpindahan beban dinamis. Pengujian ini dilakukan untuk mengetahui ketepatan Arduino mengatur perpindahan beban dinamis untuk melakukan kompensasi gaya torsi oleh beban statis.
Pengujian mobile robot melalui medan uji coba dengan kemiringan maksimal 30
0. Pengujian ini dilakukan untuk mengetahui perpindahan beban dinamis sudah dapat membut mobile robot tidak terbalik.
Untuk mencari persentase kesalahan / error dapat digunakan persamaan sebagai berikut :
= ∑ ( − ) (4.1)
Dimana : k = data ke ..
n = jumlah data
= nilai dari pengujian ′ = nilai acuan
% = (4.2)
4.1. Pengujian Program Arduino untuk Ketepatan Pengukuran Kemiringan Medan Uji Coba.
Pengujian ini dilakukan untuk mengetahui ketepatan pengukuran kemiringan medan uji coba yang dilakukan oleh Arduino. Pengukuran difokuskan pada kemiringan 5
Ohingga 30
Oyang diubah kemiringannya setiap 5
Okarena disesuaikan dengan medan uji coba yang telah dibuat. Pengujian dilakukan setelah program pada Gambar 3.19. dijalankan dan melakukan pengukuran. Cara pengujian terhadap pengukuran kemiringan medan uji coba dapat dilihat pada Gambar 4.1.
Gambar 4.1. Pengujian Pengukuran Kemiringan Medan Uji
Pengujian program untuk ketepatan pengukuran kemiringan medan uji coba dilakukan dengan mengambil data sebanyak 13 data pada setiap perubahan kemiringan medan uji coba yang dibandingkan dengan busur derajat. Hasil pengujian dapat dilihat pada Tabel 4.1 dan Tabel 4.2.
Tabel 4.1. Tabel Perbandingan Pengukuran Accelerometer dan Kemiringan Medan Uji Coba
Arduino + Accelerometer (derajat)
Pembacaan Busur
Selisih / Kemiringan Medan
Uji (derajat)
45 30 15
40 25 15
33 20 13
25 15 10
18 10 8
Tabel 4.2. Tabel Perbandingan Pengukuran Accelerometer dan Kemiringan Medan Uji Coba (lanjutan)
0 0 0
-13 -5 -8
-20 -10 -10
-27 -15 -12
-34 -20 -14
-43 -25 -18
-50 -30 -20
Nilai RMSE 12,51
% Error Rata-Rata 62,57
Pada Tabel 4.1 dan Tabel 4.2 dapat dilihat terjadi perbedaan yang cukup
besar antara pembacaan program Arduino dengan pengukuran busur derajat /
kemiringan medan uji coba. Data tersebut memiliki persentase kesalahan rata-rata
sebesar 62,57 %. Hasil pengukuran yang telah dilakukan kemudian diregresi
sehingga didapatkan hasil yang lebih maksimal. Regresi dilakukan dengan
menggunakan Microsoft Excel dan menggabungkan kedua data tersebut dalam
grafik scatter dengan pengukuran Arduino sebagai nilai x dan pengukuran busur
derajat sebagai nilai y. Setelah grafik terbentuk, ditambahkan trendline dengan jenis
persamaan polinomial orde 2. Dapat dilihat hasil grafik yang terbentuk beserta
persamaan regresi pada Gambar 4.2.
Hasil dari regresi pengukuran kemiringan medan oleh Arduino didapatkan nilai determinasi sebesar 0.9964 dan persamaan sebagai berikut :
y = 0.0006x
2+ 0.602x – 0.0388 (4.3)
Nilai kemiringan medan yang baru dihitung oleh Arduino dengan menggunakan persamaan di atas seperti program pada Gambar 4.3.
Gambar 4.3. Program Perhitungan Kemiringan Medan Baru
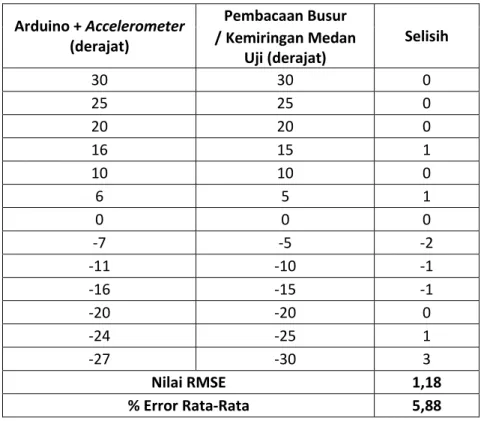
Hasil program perhitungan kemiringan medan baru diuji kembali dengan cara dibandingkan dengan pengukuran busur derajat dan kemiringan medan uji coba seperti pada Tabel 4.3.
Tabel 4.3. Tabel Perbandingan Pengukuran Accelerometer Baru dan Kemiringan Medan Uji Coba
Arduino + Accelerometer (derajat)
Pembacaan Busur
Selisih / Kemiringan Medan
Uji (derajat)
30 30 0
25 25 0
20 20 0
16 15 1
10 10 0
6 5 1
0 0 0
-7 -5 -2
-11 -10 -1
-16 -15 -1
-20 -20 0
-24 -25 1
-27 -30 3
Nilai RMSE 1,18
% Error Rata-Rata 5,88
SudutBaru = (0.0006*Sudut*Sudut)
+(0.602*Sudut)-0.0388;
Hasil pengujian program perhitungan kemiringan medan baru memiliki ketepatan pembacaan yang lebih baik pada setiap perubahan kemiringan medan uji coba. Data tersebut memiliki persentase kesalahan rata-rata sebesar 5,88 %. Data yang didapatkan masih memiliki persentase kesalahan karena determinasi yang didapatkan pada persamaan 4.3 hanya bernilai 0,9964.
4.2. Pengujian Program Arduino untuk Ketepatan Perpindahan Beban Dinamis
Pengujian ini dilakukan untuk mengetahui ketepatan perpindahan beban dinamis yang dilakukan oleh Arduino. Pengukuran difokuskan pada data perpindahan beban dinamis yang telah didapat pada subbab 3.2.2.6. Pengujian dibagi menjadi 2 bagian yaitu pengujian perpindahan beban dinamis pada saat melakukan perhitungan dengan program Arduino dan pengujian waktu yang diperlukan melakukan perpindahan beban dinamis dan pembacaan sudut kemiringan medan uji.
4.2.1. Pengujian Program Arduino untuk Ketepatan Perpindahan Beban Dinamis
Pengujian ini dilakukan untuk mengetahui perpindahan beban dinamis yang dilakukan berdasarkan perhitungan oleh Arduino sudah sesuai dengan hasil perhitungan yang telah dilakukan. Pengujian dilakukan setelah program pada Gambar 3.25 dan Gambar 3.26 dijalankan dan melakukan perhitungan untuk melakukan perpindahan beban dinamis. Pengujian ini hanya difokuskan pada kemiringan medan uji 30
0saja karena berdasarkan data pengujian yang dilakukan pada subbab 3.2.2.6. Metode pengujian yang dilakukan dengan meletakkan mobile robot pada medan uji dengan kemiringan medan uji sebesar 30
0dan mengganti beban secara berkala sesuai dengan yang dilakukan pada pengujian subbab 3.2.2.6.
Beban yang digunakan untuk pengujian menggunakan anak timbangan yang
memiliki massa masing-masing sebesar 50 gram, 100 gram, dan 200 gram seperti
pada Gambar 4.4.
Gambar 4.4. Beban Statis untuk pengujian sistem
Posisi beban statis pada saat berada pada bidang datar adalah berada pada titik tengah mobile robot yang dapat dilihat pada Gambar 4.5.
Gambar 4.5. Posisi Beban Dinamis pada Bidang Datar
Pengujian pertama dilakukan dengan menggunakan massa beban statis
yang diubah secara berkala dan pada kemiringan medan uji sebesar 30
O. Hasil
pengujian dapat dilihat pada Gambar 4.6 dan Gambar 4.7.
Gambar 4.6. Posisi Beban Dinamis saat Massa Beban Statis 350 gram dan Kemiringan Medan Uji 30
OGambar 4.7. Posisi Mobile Robot saat Massa Beban Statis 350 gram dan Kemiringan Medan Uji 30
OPada Gambar 4.6 dan Gambar 4.7 dapat dilihat bahwa beban dinamis bergeser sebesar 11 cm kearah depan dan mobile robot dalam kondisi stabil saat berada pada kemiringan 30
O.
Pengujian kedua dilakukan dengan menggunakan massa beban statis 350
gram dan kemiringan medan uji coba – 30
O(medan uji menurun). Hasil pengujian
dapat dilihat pada Gambar 4.8 dan Gambar 4.9.
Gambar 4.8. Posisi Beban Dinamis saat Massa Beban Statis 350 gram dan Kemiringan Medan Uji -30
0(medan uji menurun)
Gambar 4.9. Posisi Mobile Robot saat Massa Beban Statis 350 gram dan Kemiringan Medan Uji -30
0(medan uji menurun)
Pada Gambar 4.8 dan Gambar 4.9 dapat dilihat bahwa beban dinamis bergeser sebesar 10 cm kearah belakang dan mobile robot dalam keadaan stabil saat berada pada kemiringan – 30
O.
Berdasarkan pengujian yang dilakukan maka diperoleh data sebagai
berikut :
Tabel 4.4. Hasil Pengujian Perpindahan Beban Dinamis Sudut 30
OSudut Massa Beban Hasil Perhitungan Perpindahan Selisih (cm) Statis (gram) Arduino (cm) Beban Dinamis (cm)
30
50
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
100
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
150
1 1 0,00
1 1 0,00
1 1 0,00
1 1 0,00
1 1 0,00
200
2 2 0,00
2 2 0,00
2 2 0,00
2 2 0,00
2 2 0,00
250
4 4 0,00
4 4 0,00
4 4 0,00
4 4 0,00
4 4 0,00
300
7 7 0,00
7 7 0,00
7 7 0,00
7 7 0,00
7 7 0,00
350
11 11 0,00
11 11 0,00
11 11 0,00
11 11 0,00
11 11 0,00
% Error Rata-Rata 0,00
Tabel 4.5. Hasil Pengujian Perpindahan Beban Dinamis Sudut – 30
OSudut Massa Beban Hasil Perhitungan Perpindahan Beban Selisih (cm) Statis (gram) Arduino (cm) Dinamis (cm)
-30
50
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
100
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
150
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
0 0 0,00
200
-2 -2 0,00
-2 -2 0,00
-2 -2 0,00
-2 -2 0,00
-2 -2 0,00
250
-5 -5 0,00
-5 -5 0,00
-5 -5 0,00
-5 -5 0,00
-5 -5 0,00
300
-8 -8 0,00
-8 -8 0,00
-8 -8 0,00
-8 -8 0,00
-8 -8 0,00
350
-10 -10 0,00
-10 -10 0,00
-10 -10 0,00
-10 -10 0,00
-10 -10 0,00
% Error Rata-Rata 0,00
Data pada Tabel 4.4 dan Tabel 4.5 menunjukan besar perpindahan beban dinamis pada masing-masing pengujian dengan kemiringan medan uji 30
Odan kemiringan medan uji -30
Oyang dilakukan oleh program Arduino dibandingkan dengan hasil perhitungan Arduino untuk perpindahan beban dinamis menunjukkan tidak ada selisih antara dua data tersebut. Berdasarkan data pada Tabel 4.4 dan Tabel 4.5 maka didapatkan hubungan antara massa beban statis dengan besar perpindahan beban dinamis yang dapat dilihat pada Tabel 4.6.
Tabel 4.6. Hubungan Massa Beban Statis dan Perpindahan Beban Dinamis
Massa Beban PerpindahanStatis (gram) Beban Dinamis (cm)
50 0
100 0
150 0,5
200 2
250 4,5
300 7,5
350 10,5
Berdasarkan data pada Tabel 4.6 maka dapat dibuat grafik yang dapat dilihat pada Gambar 4.10.
Gambar 4.10. Grafik Hubungan antara Massa Beban Statis dan Perpindahan
Beban Dinamis
Berdasarkan pada grafik pada Gambar 4.10 maka didapatkan persamaan hubungan antara massa beban statis dengan besar perpindahan beban dinamis yaitu :
y = 0,000140x
2– 0,020119x + 0,571429 (4.4)
y = Perpindahan Beban Dinamis (cm) x = Massa Beban Statis (gram)
Kesimpulan dari hasil pengujian yang dilakukan adalah hasil perhitungan Arduino sudah sesuai dengan perpindahan beban dinamis pada mobile robot dan didapatkan hubungan antara massa beban statis dan perpindahan beban dinamis yang terdapat pada persamaan 4.4.
4.2.2. Pengujian Waktu yang Diperlukan untuk Melakukan Perpindahan Beban Dinamis dan Pembacaan Kemiringan Medan Uji
Pengujian pertama adalah pengujian waktu perpindahan beban dinamis.
Pengujian ini memiliki tujuan untuk mengetahui waktu yang diperlukan untuk melakukan perpindahan dinamis. Metode pengujian waktu perpindahan beban dinamis adalah dengan melakukan perhitungan waktu menggunakan stopwatch saat beban mulai bergeser hingga menuju posisi tertentu. Pengujian dilakukan dengan menggunakan jarak perpindahan yang berbeda-beda. Hasil pengujian dapat dilihat pada Tabel 4.7 dan Tabel 4.8.
Tabel 4.7. Hasil Pengujian Waktu Perpindahan Beban Dinamis
Perpindahan Waktu (detik) Waktu/cm (detik)Beban Dinamis (cm)
2 0,37 0,19
2 0,35 0,18
2 0,37 0,19
2 0,37 0,19
2 0,36 0,18
4 0,91 0,23
4 0,93 0,23
Tabel 4.8. Hasil Pengujian Waktu Perpindahan Beban Dinamis (lanjutan)
4 0,94 0,24
4 0,92 0,23
7 1,56 0,22
7 1,49 0,21
7 1,55 0,22
7 1,52 0,22
7 1,57 0,22
11 2,56 0,23
11 2,54 0,23
11 2,49 0,23
11 2,47 0,22
11 2,58 0,23
Rata-rata Waktu 0,22
Berdasarkan data pada Tabel 4.7 dan Tabel 4.8 dapat diketahui bahwa rata-
rata waktu untuk melakukan perpindahan beban dinamis tiap 1 cm adalah sebesar
0,22 detik. Kecepatan perpindahan tidak dapat dipercepat lagi dikarenakan
clockspeed dari driver motor stepper TB6600 adalah sebesar 200 KHz (Toshiba,
2014) yang berarti memiliki periode sinyal clock sebesar 5 µs. Periode sinyal clock
yang digunakan pada program Arduino adalah sebesar 10 µs. Pengujian kedua
adalah pengujian waktu pembacaan kemiringan medan uji. Metode pengujian
waktu pembacaan kemiringan medan adalah dengan menggunakan perhitungan
waktu dengan menggunakan bantuan program Arduino seperti yang dapat dilihat
pada Gambar 4.11 dan mobile robot dijalankan pada medan uji.
Gambar 4.11. Program Arduino Perhitungan Waktu Pembacaan Kemiringan Medan Uji
Pada Gambar 4.11 dapat dilihat bahwa dilakukan pembacaan sudut dengan menggunakan perintah BacaSudut(). Kemudian saat pembacaan variabel SudutBaru == 0 maka program Arduino akan mengambil waktu tersebut kemudian disimpan dalam variabel starttime. Hal yang sama juga dilakukan saat pembacaan SudutBaru == 30 maka program Arduino akan mengambil waktu tersebut kemudian disimpan dalam variabel lasttime. Kemudian akan dicari selisih antara lasttime dan starttime yang akan disimpan dalam variabel elapsedtime. Elapsedtime adalah waktu yang dibutuhkan untuk pembacaan kemiringan medan uji. Hasil pengujian yang dilakukan dapat dilihat pada Tabel 4.9.
void loop() { BacaSudut();
if(SudutBaru == 0){
starttime = millis();
}
If(SudutBaru == 30){
lasttime = millis();
}
elapsedtime = lasttime – starttime;
Serial.println(elapsedtime);
}
Tabel 4.9. Hasil Pengujian Waktu Pembacaan Kemiringan Medan Uji
Sudut Percobaan ke Waktu (detik) Waktu / Sudut (detik)
0 - 30
1 13,976 0,466
2 13,161 0,439
3 13,164 0,439
4 13,949 0,465
5 13,116 0,437
6 13,115 0,437
7 13,154 0,438
8 13,116 0,437
9 13,091 0,436
10 13,145 0,438
Rata-rata 0,443
Berdasarkan data pada Tabel 4.9 dapat diketahui bahwa waktu rata-rata yang dibutuhkan untuk melakukan pembacaan terhadap perubahan kemiringan medan uji adalah 0,443 detik tiap terjadi perubahan 1 derajat. Kesimpulan yang didapatkan dari kedua pengujian tersebut adalah perpindahan beban dinamis lebih cepat daripada pembacaan kemiringan medan uji sehingga beban dinamis dapat memberikan kompensasi agar mobile robot tidak terbalik.
4.3. Pengujian Mobile Robot melalui Medan Uji Coba dengan Kemiringan Maksimal 30
0Pengujian ini memiliki tujuan untuk mengetahui perpindahan beban
dinamis sudah dapat mencegah mobile robot terbalik. Metode pengujian adalah
dengan menjalankan mobile robot pada medan uji dengan kemiringan maksimal 30
derajat serta membawa massa beban statis yang berubah-ubah. Hasil pengujian
dapat dilihat pada Tabel 4.10 dan Tabel 4.11.
Tabel 4.10. Hasil Pengujian Mobile Robot melalui Medan Uji
Kemiringan Massa Beban Melalui Medan Uji % TingkatMedan Uji
(derajat) Statis (gram) Berhasil Tidak Keberhasilan
5
50 5 0
100 %
100 5 0
150 5 0
200 5 0
250 5 0
300 5 0
350 5 0
10
50 5 0
100 %
100 5 0
150 5 0
200 5 0
250 5 0
300 5 0
350 5 0
15
50 5 0
100 %
100 5 0
150 5 0
200 5 0
250 5 0
300 5 0
350 5 0
20
50 5 0
100 %
100 5 0
150 5 0
200 5 0
250 5 0
300 5 0
350 5 0
Tabel 4.11. Hasil Pengujian Mobile Robot melalui Medan Uji (lanjutan)
25
50 5 0
100 %
100 5 0
150 5 0
200 5 0
250 5 0
300 5 0
350 5 0
30
50 5 0
88,57 %
100 5 0
150 5 0
200 5 0
250 4 1
300 4 1
350 3 2
% Tingkat Keberhasilan Rata-Rata 98,10